bab vi prngantar robotika
DESCRIPTION
pengantar robotikaTRANSCRIPT
Bab VI Mobile Robot Motion Planning
1
Untuk apa Motion Planning?p g• Untuk menentukan kemana akan bergerak
tanpa menabrak halangan (obstacle)tanpa menabrak halangan (obstacle)
2
Materi yang dibahasy g• Dasar
– Ruang Konfigurasi (Configuration Space)– C-obstaclesC obstacles
• Metoda-metoda Motion Planning– Roadmap Approaches
• Visibility graphsV i di• Voronoi diagram
– Cell Decomposition• Trapezoidal Decomposition• Quadtree Decomposition
– Potential Fields– Bug Algorithms
• Referensi :– G Dudek M Jenkin Computational Principles of Mobile Robots– G. Dudek, M. Jenkin, Computational Principles of Mobile Robots,
MIT Press, 2000 (Chapter 5)– J.C. Latombe, Robot Motion Planning, Kluwer Academic
Publishers, 1991.
3
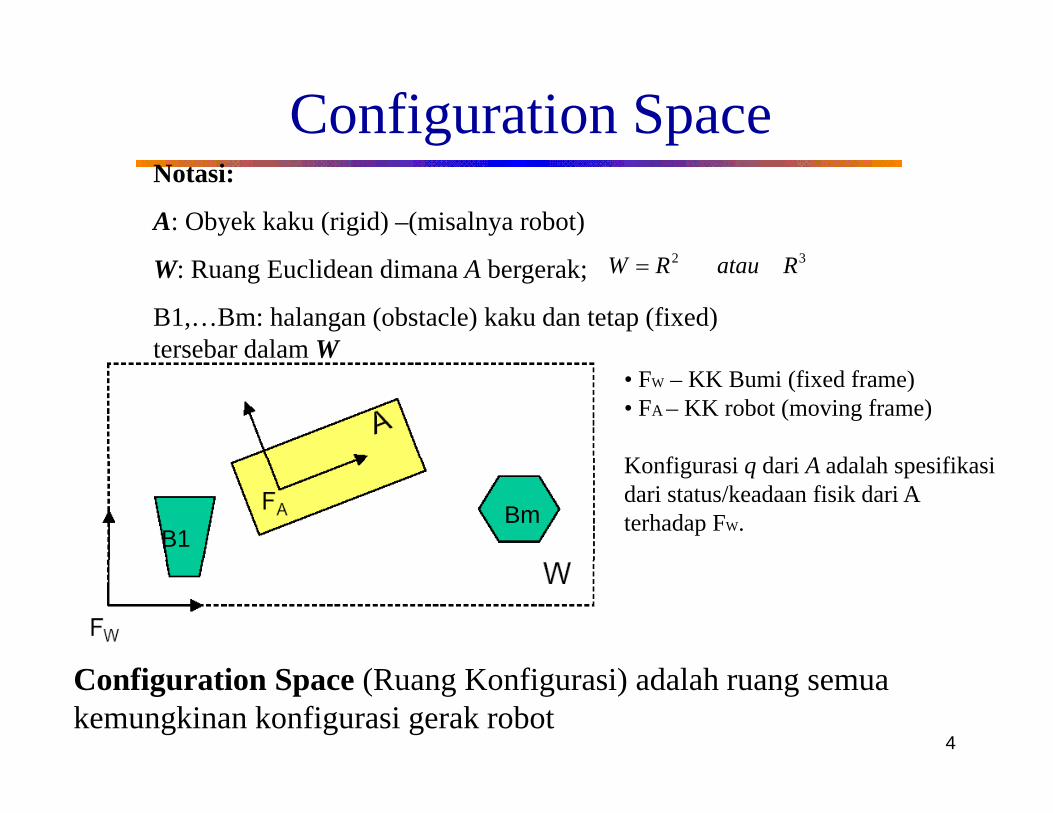
Configuration SpaceNotasi:
A: Obyek kaku (rigid) –(misalnya robot)
W: Ruang Euclidean dimana A bergerak;
B1,…Bm: halangan (obstacle) kaku dan tetap (fixed) tersebar dalam W
32 RatauRW =
tersebar dalam W• FW – KK Bumi (fixed frame)• FA – KK robot (moving frame)
K fi i d i A d l h ifik iKonfigurasi q dari A adalah spesifikasi dari status/keadaan fisik dari A terhadap FW.
B1Bm
4
Configuration Space (Ruang Konfigurasi) adalah ruang semua kemungkinan konfigurasi gerak robot
Configuration Space
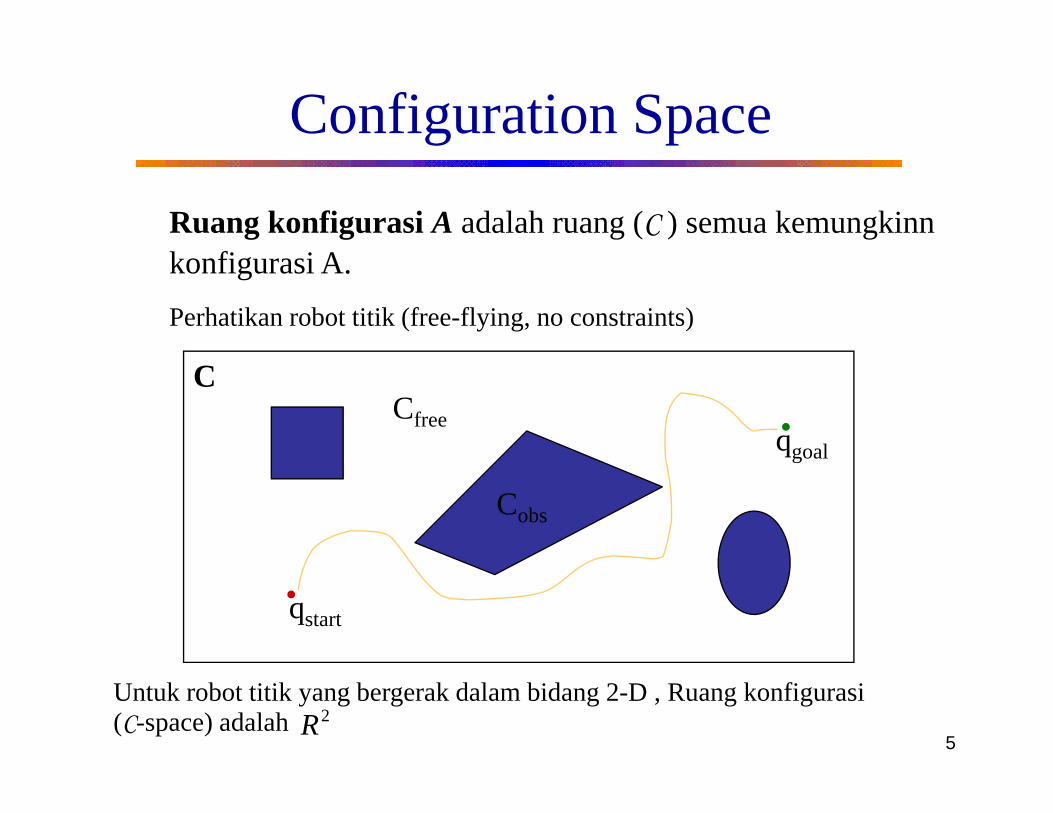
Ruang konfigurasi A adalah ruang (C ) semua kemungkinn k fi i Akonfigurasi A.Perhatikan robot titik (free-flying, no constraints)
CCfree
qgoal
Cobs
goal
qstart
5
Untuk robot titik yang bergerak dalam bidang 2-D , Ruang konfigurasi (C-space) adalah 2R
Configuration SpaceC
Ζy
qgoalCfree
Cobs
x
qstart
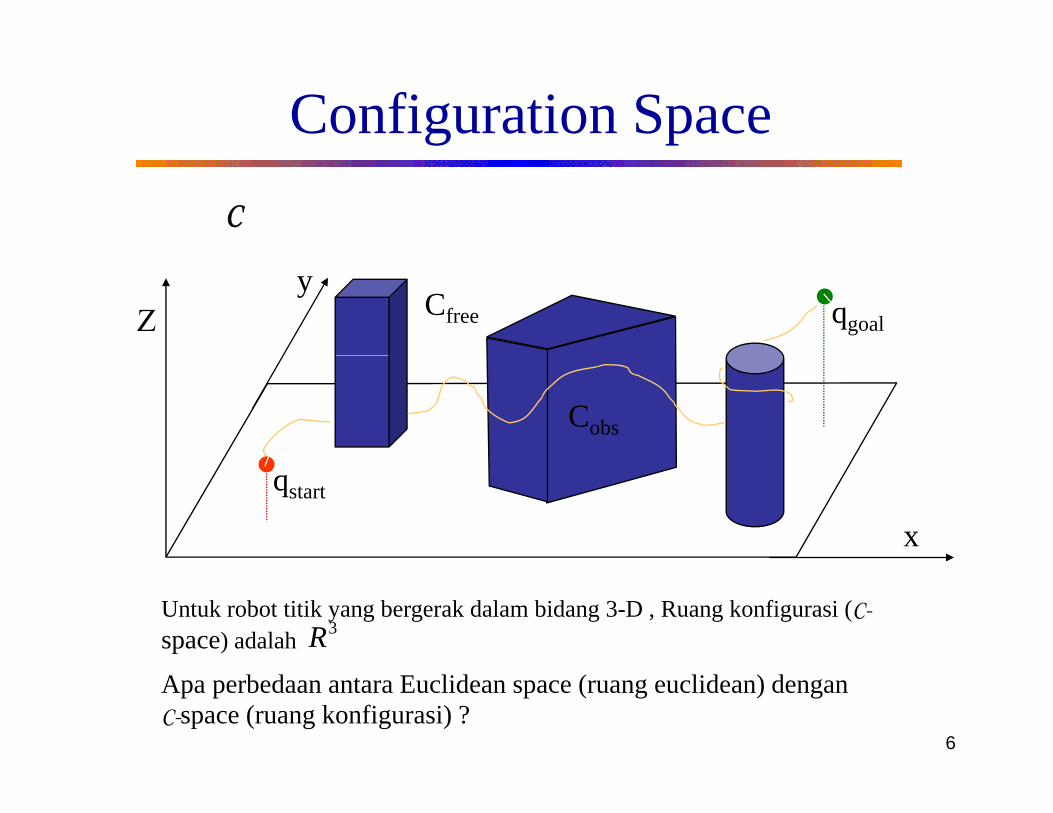
Untuk robot titik yang bergerak dalam bidang 3-D , Ruang konfigurasi (C-space) adalah 3R
6
Apa perbedaan antara Euclidean space (ruang euclidean) dengan C-space (ruang konfigurasi) ?
Configuration Spaceg pY
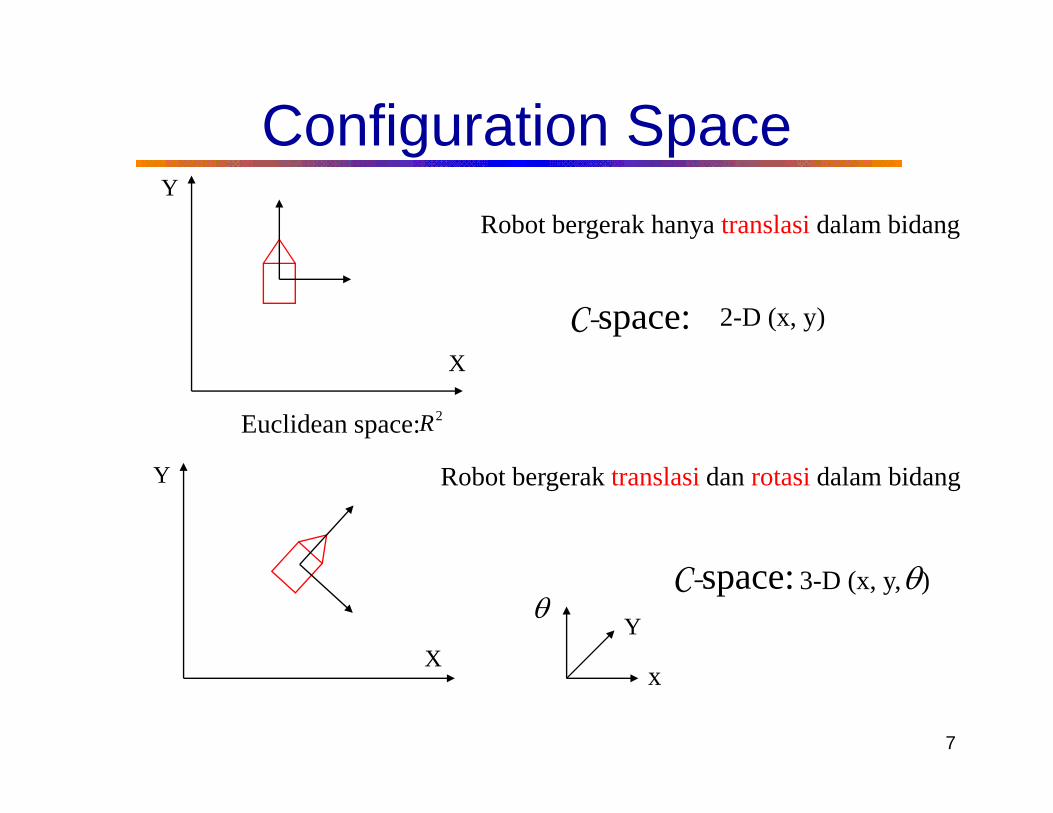
Robot bergerak hanya translasi dalam bidang
X
C-space: 2-D (x, y)
X
Euclidean space: 2R
Y Robot bergerak translasi dan rotasi dalam bidang
θθ
XY
C-space: 3-D (x, y, )
7
Xx
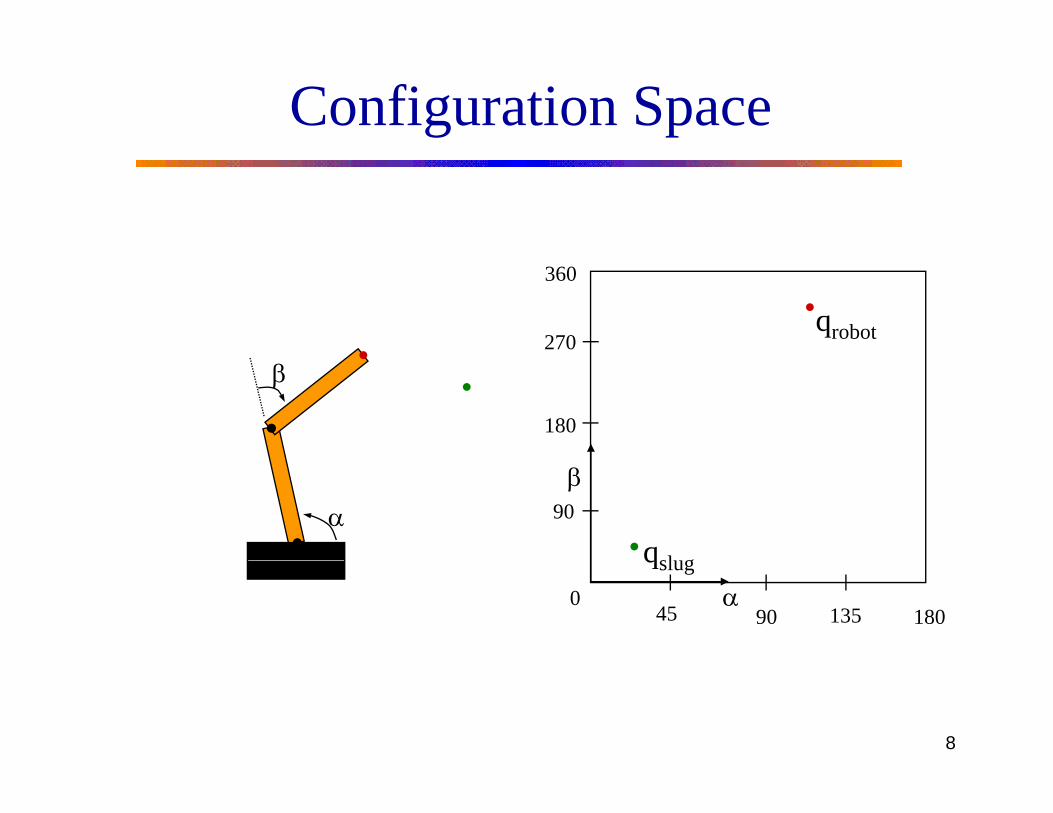
Configuration Space
270
360
qrobot
180
β
β90
qsl g
α
α090 18013545
qslug
8
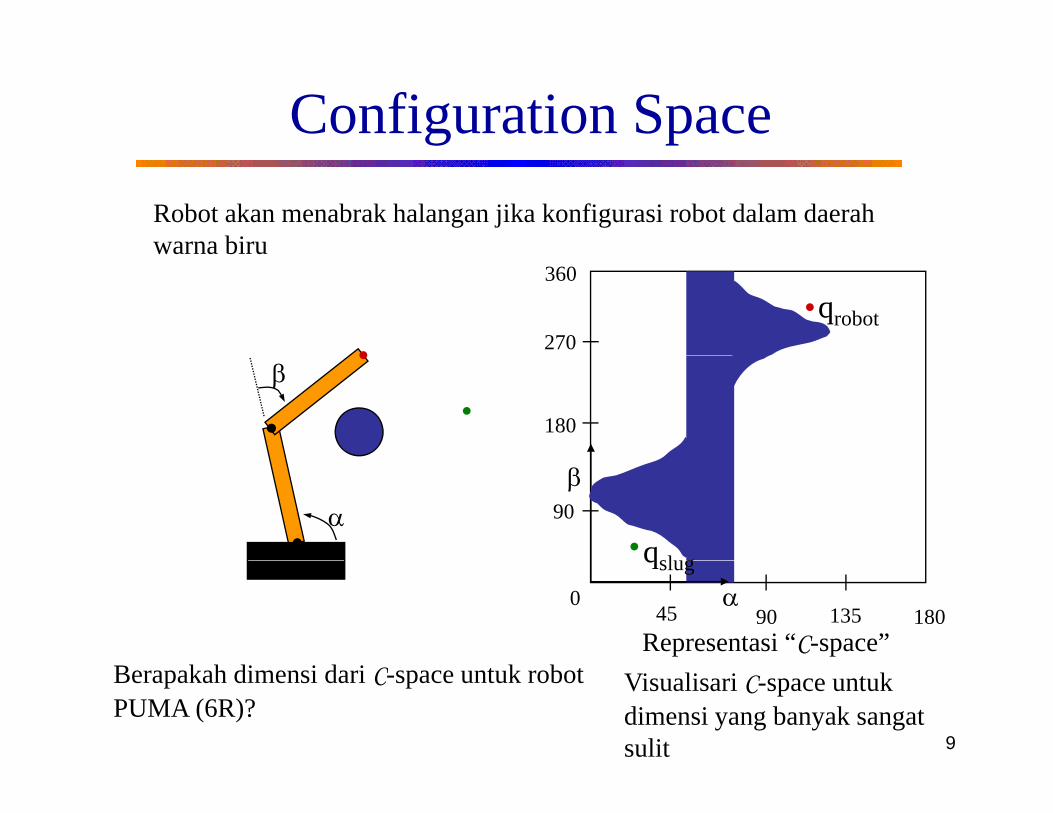
Configuration SpaceRobot akan menabrak halangan jika konfigurasi robot dalam daerah warna biru
270
360
qrobot
warna biru
180
β
β90
qsl g
α
α090 18013545
qslug
Representasi “C-space”
9
Berapakah dimensi dari C-space untuk robot PUMA (6R)?
Visualisari C-space untuk dimensi yang banyak sangat sulit
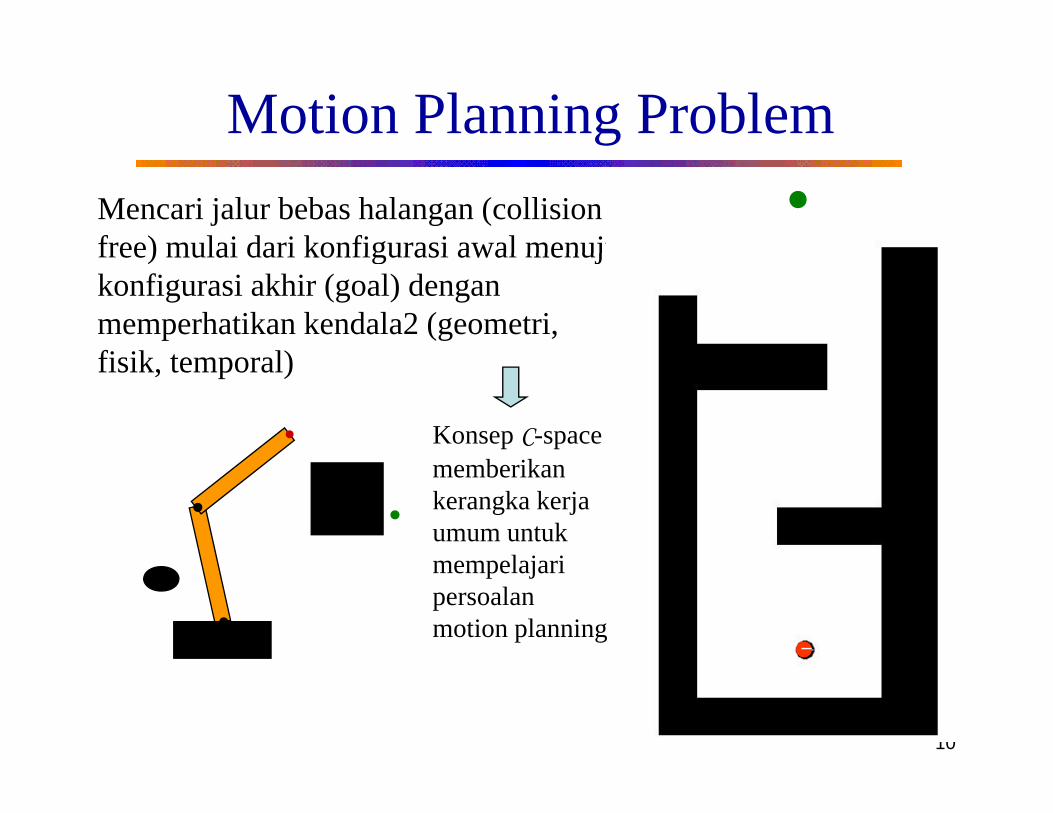
Motion Planning ProblemMencari jalur bebas halangan (collision free) mulai dari konfigurasi awal menujufree) mulai dari konfigurasi awal menuju konfigurasi akhir (goal) dengan memperhatikan kendala2 (geometri, fi ik t l)fisik, temporal)
Konsep C-space memberikan kerangka kerja umum untuk
l j imempelajari persoalan motion planning
10
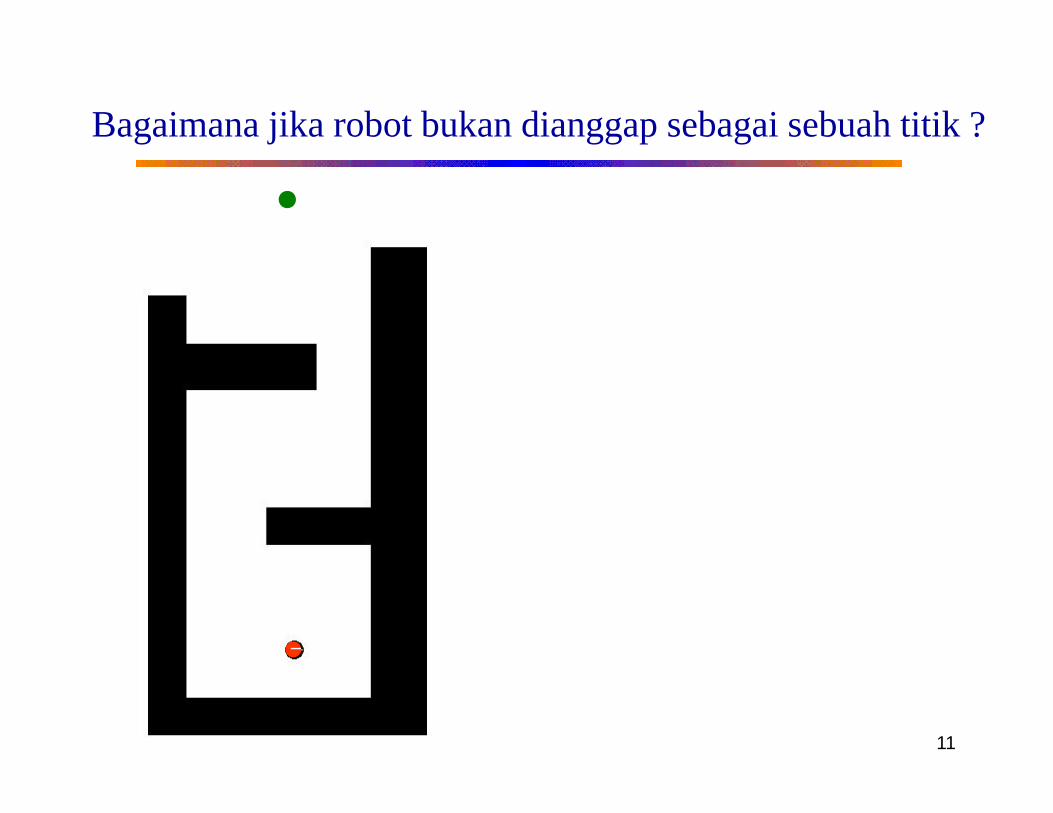
Bagaimana jika robot bukan dianggap sebagai sebuah titik ?
11
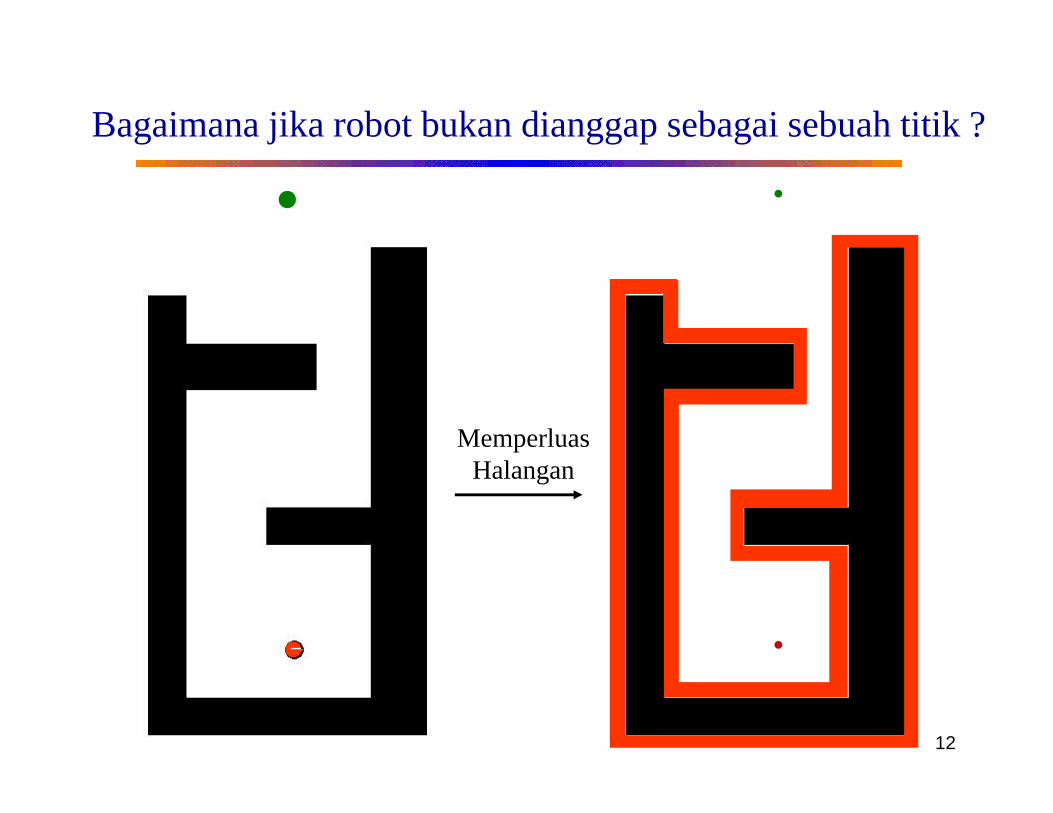
Bagaimana jika robot bukan dianggap sebagai sebuah titik ?
Memperluas Halangan
12
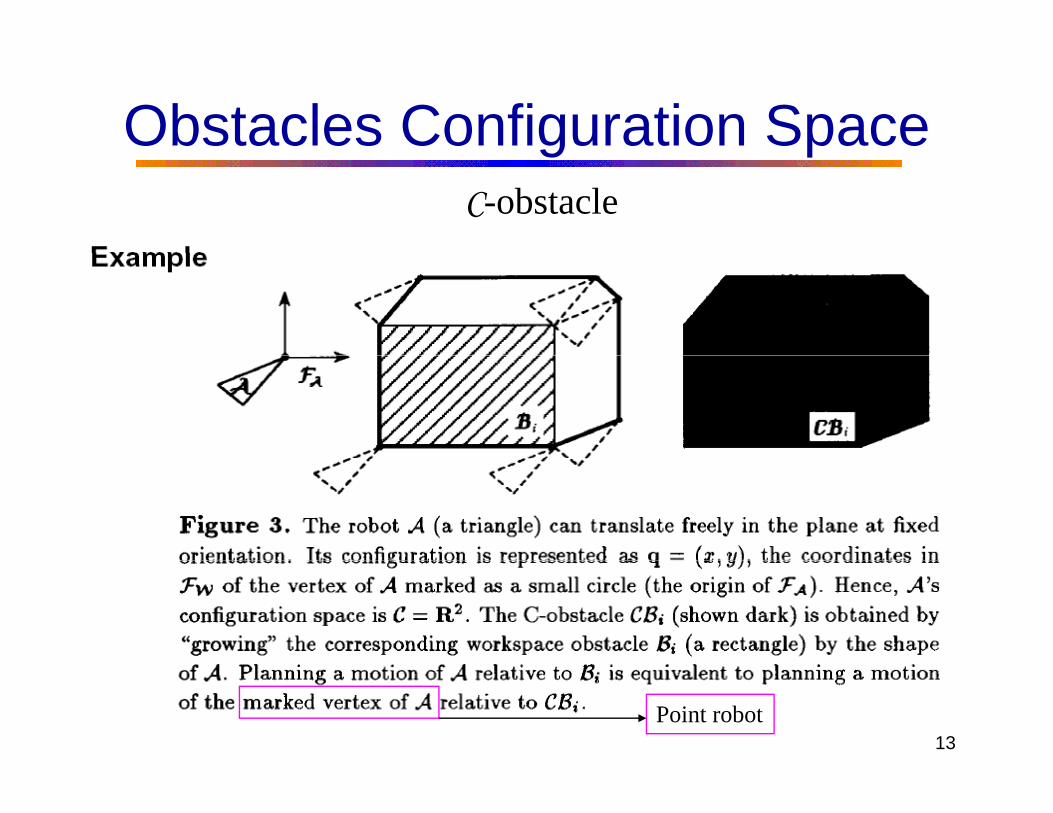
Obstacles Configuration Spaceg pC-obstacle
13Point robot
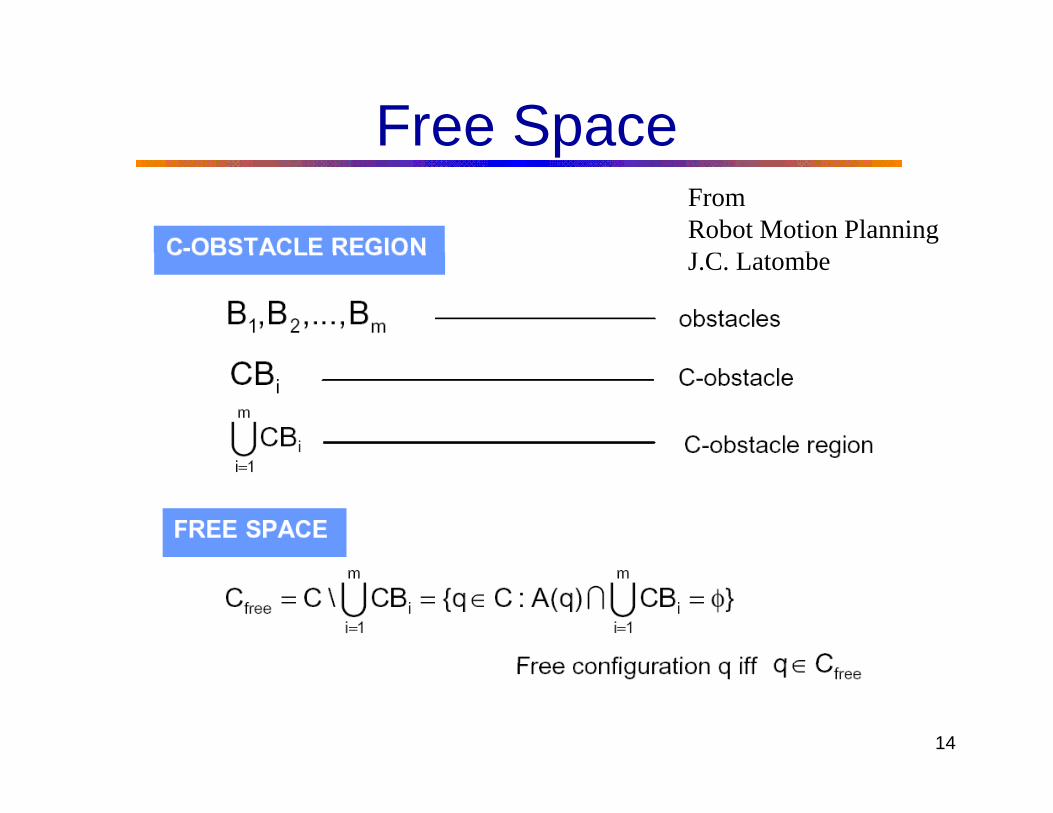
Free SpacepFromRobot Motion PlanningJ C L bJ.C. Latombe
14
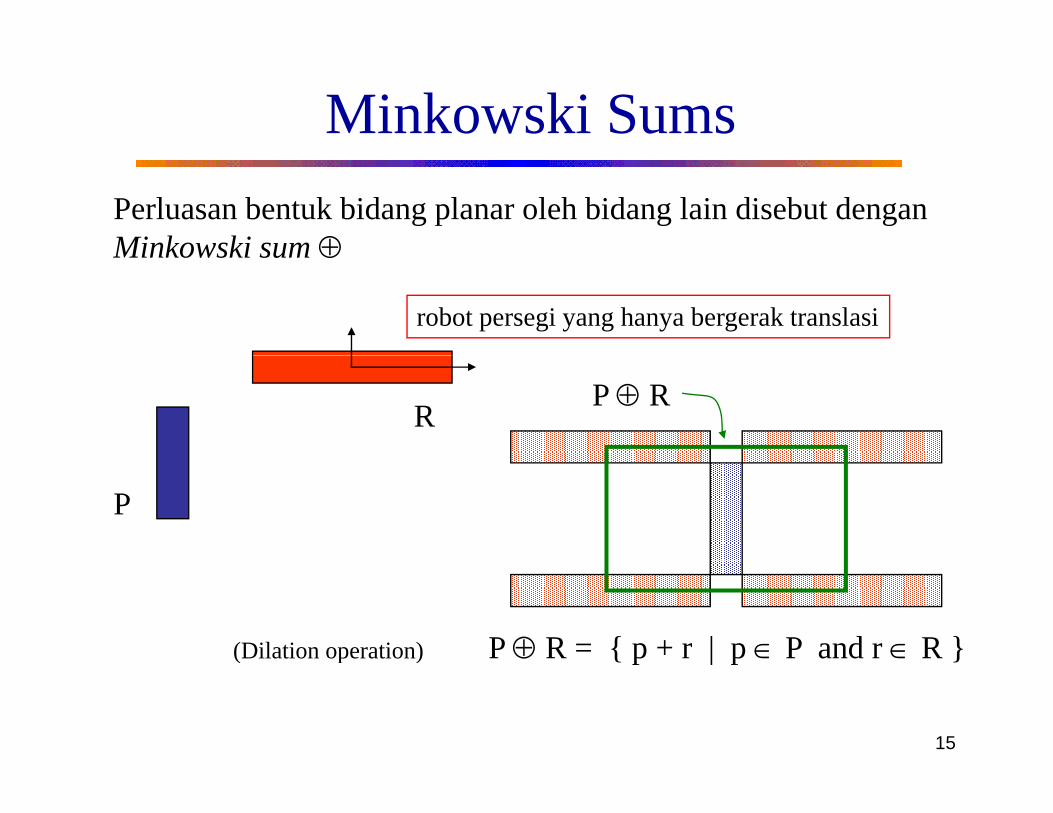
Minkowski SumsPerluasan bentuk bidang planar oleh bidang lain disebut dengan Minkowski sum ⊕Minkowski sum ⊕
robot persegi yang hanya bergerak translasi
RP ⊕ R
P
P ⊕ R = { p + r | p ∈ P and r ∈ R } (Dilation operation)
15
{ p | p }( p )
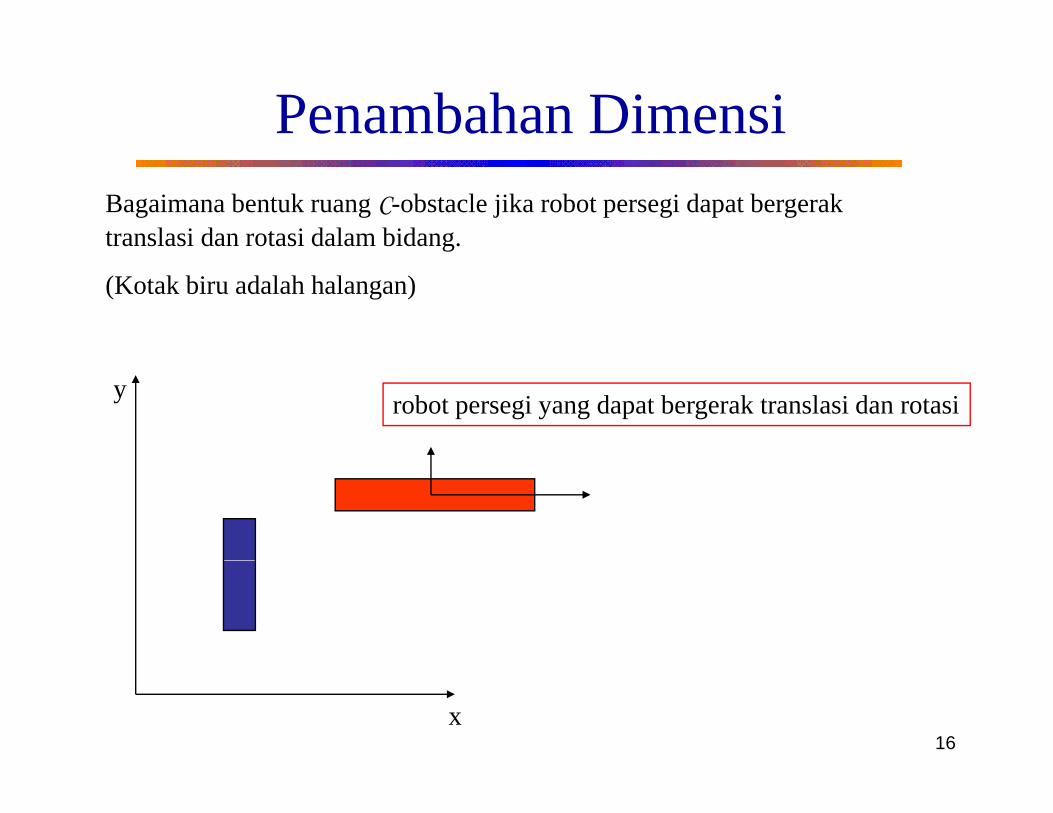
Penambahan DimensiBagaimana bentuk ruang C-obstacle jika robot persegi dapat bergerak translasi dan rotasi dalam bidang.
(Kotak biru adalah halangan)
y robot persegi yang dapat bergerak translasi dan rotasi
16x
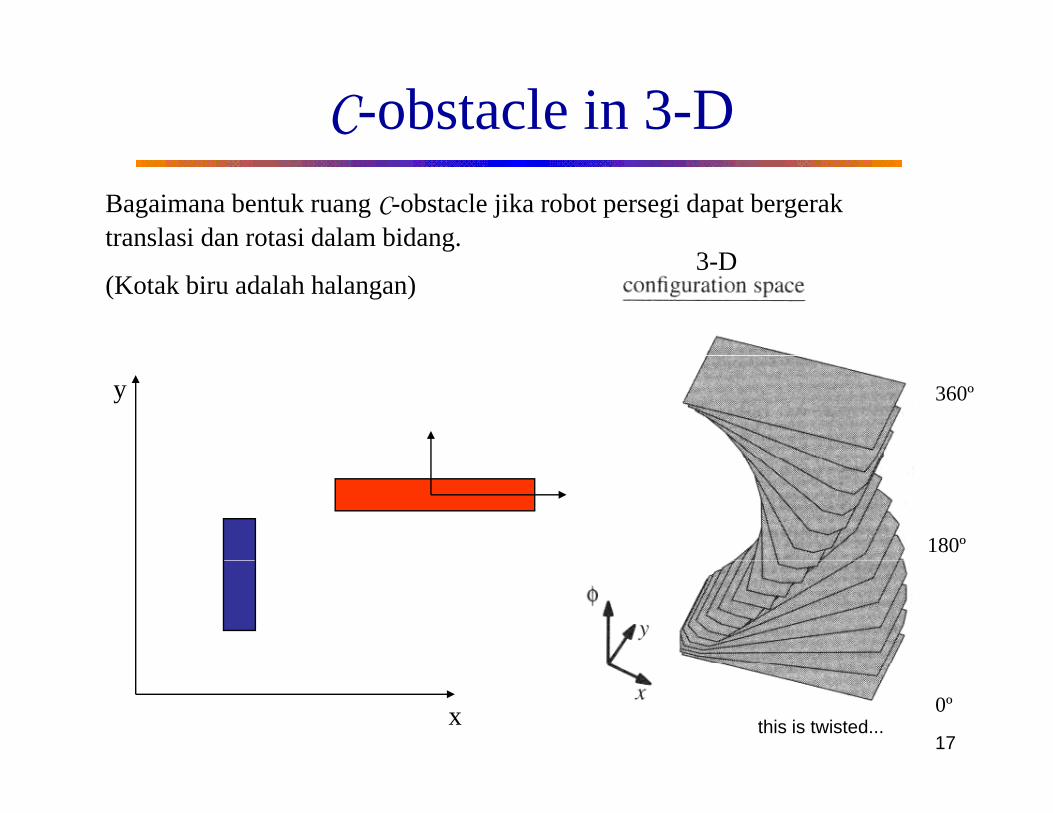
C-obstacle in 3-D
3 D
Bagaimana bentuk ruang C-obstacle jika robot persegi dapat bergerak translasi dan rotasi dalam bidang.
3-D(Kotak biru adalah halangan)
y 360º
180º
17x 0º
this is twisted...
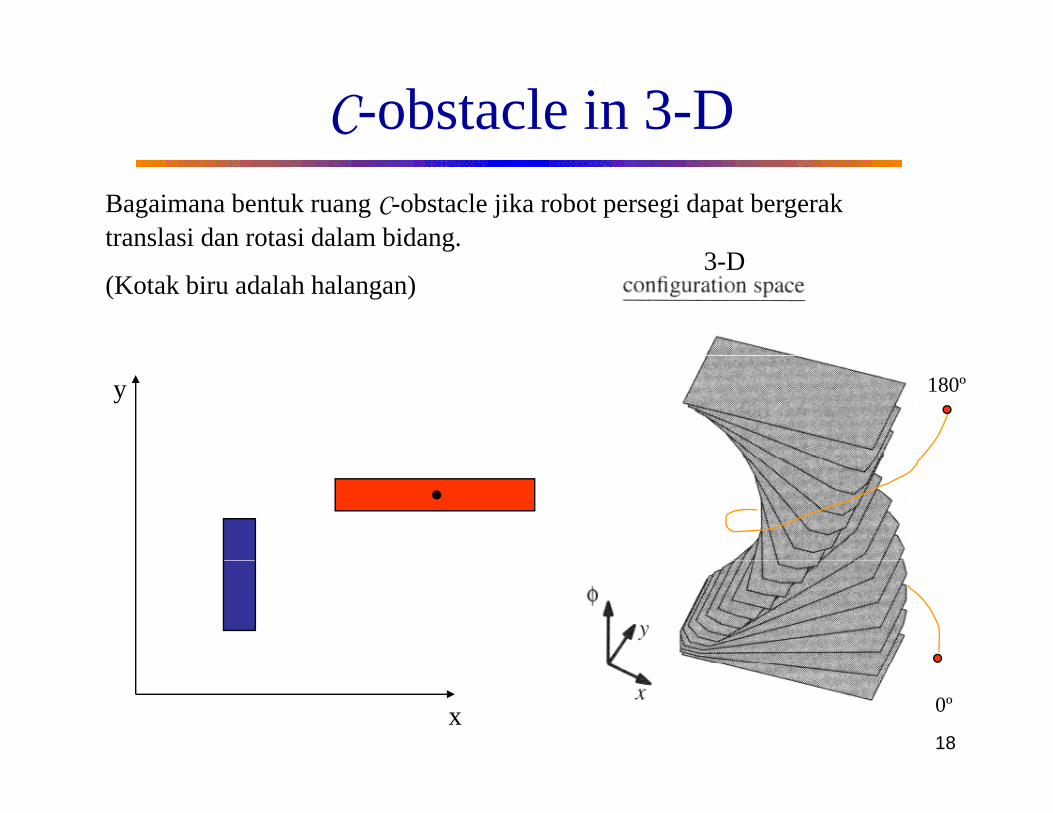
C-obstacle in 3-D
3 D
Bagaimana bentuk ruang C-obstacle jika robot persegi dapat bergerak translasi dan rotasi dalam bidang.
3-D(Kotak biru adalah halangan)
y 180º
18x 0º
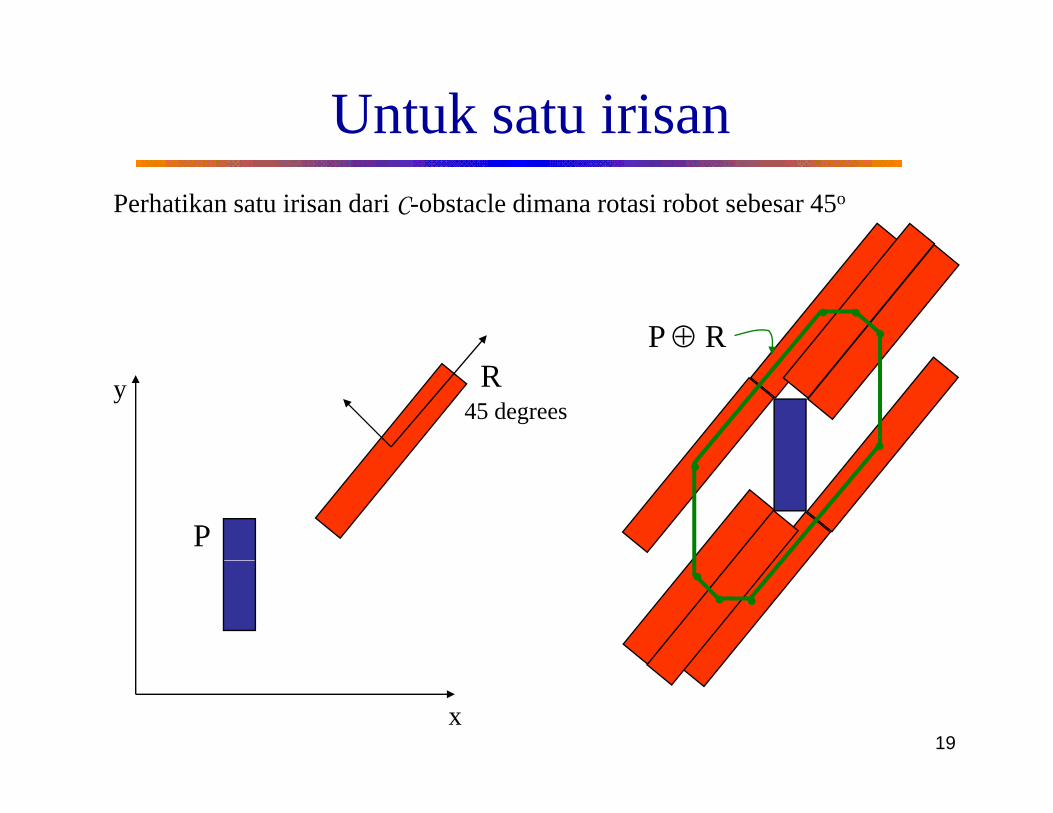
Untuk satu irisanPerhatikan satu irisan dari C-obstacle dimana rotasi robot sebesar 45o
P ⊕ R y
45 degreesR
P
19x
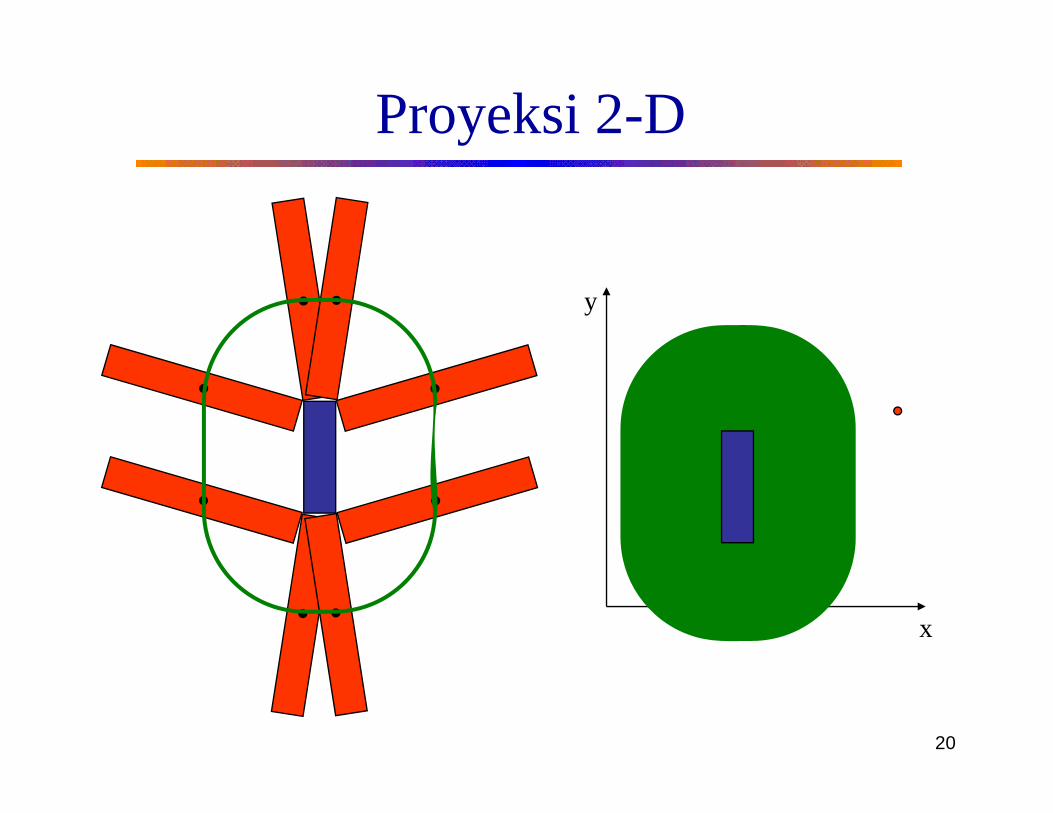
Proyeksi 2-D
y
x
20
Topik yang dibahasp y g
• Configuration Space• Motion Planning Methods
R d A h– Roadmap Approaches– Cell Decomposition– Potential FieldsPotential Fields– Bug Algorithms
21
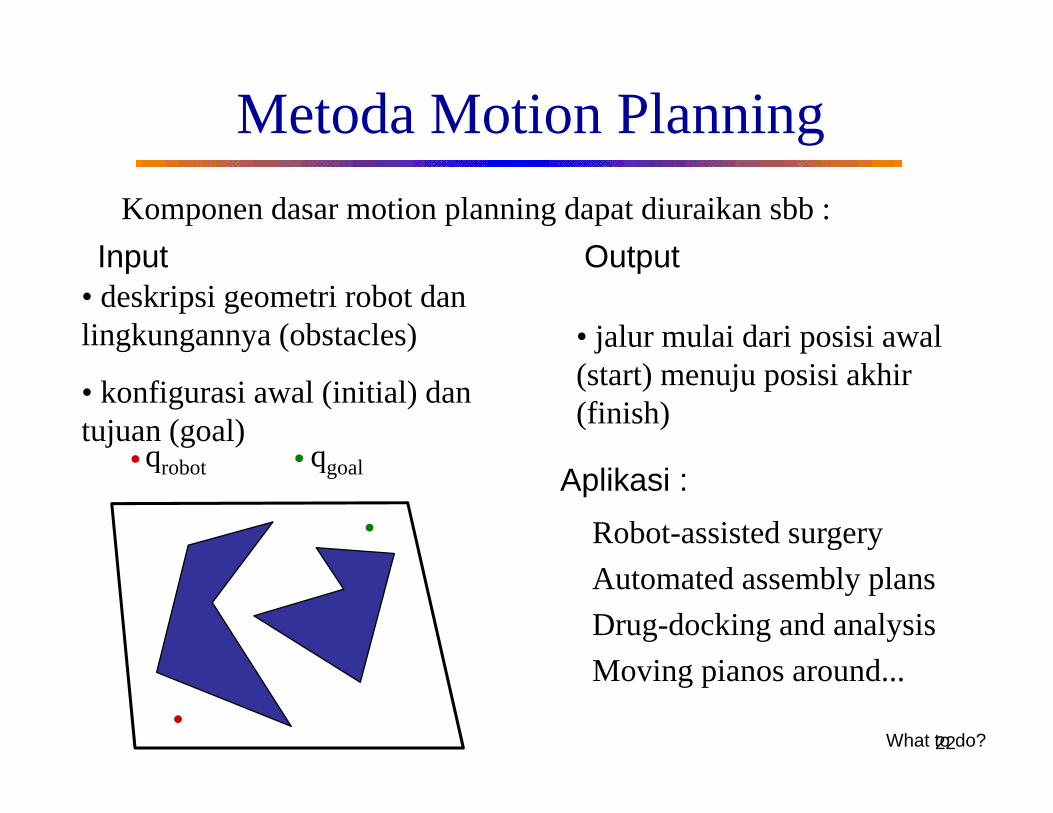
Metoda Motion Planning Komponen dasar motion planning dapat diuraikan sbb :
Input OutputInput Output• deskripsi geometri robot dan lingkungannya (obstacles) • jalur mulai dari posisi awal
• konfigurasi awal (initial) dan tujuan (goal)
(start) menuju posisi akhir (finish)
qq qgoalqrobot Aplikasi :Robot-assisted surgeryAutomated assembly plansDrug-docking and analysisM i i d
22What to do?
Moving pianos around...
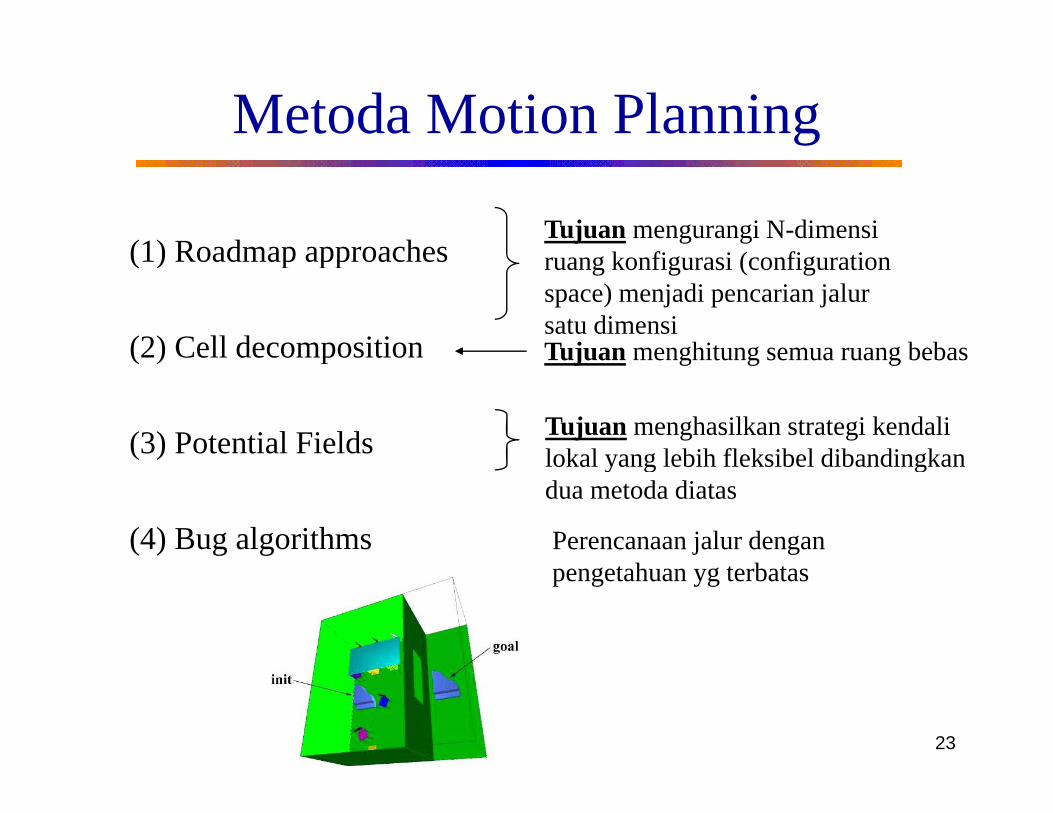
Metoda Motion Planning
(1) Roadmap approachesTujuan mengurangi N-dimensi
k fi i ( fi i(1) Roadmap approaches
(2) Cell decomposition
ruang konfigurasi (configuration space) menjadi pencarian jalur satu dimensi Tujuan menghitung semua ruang bebas(2) Cell decomposition
(3) Potential Fields
Tujuan menghitung semua ruang bebas
Tujuan menghasilkan strategi kendali lokal yang lebih fleksibel dibandingkan( )
(4) Bug algorithms
lokal yang lebih fleksibel dibandingkan dua metoda diatas
Perencanaan jalur dengan pengetahuan yg terbatas
23
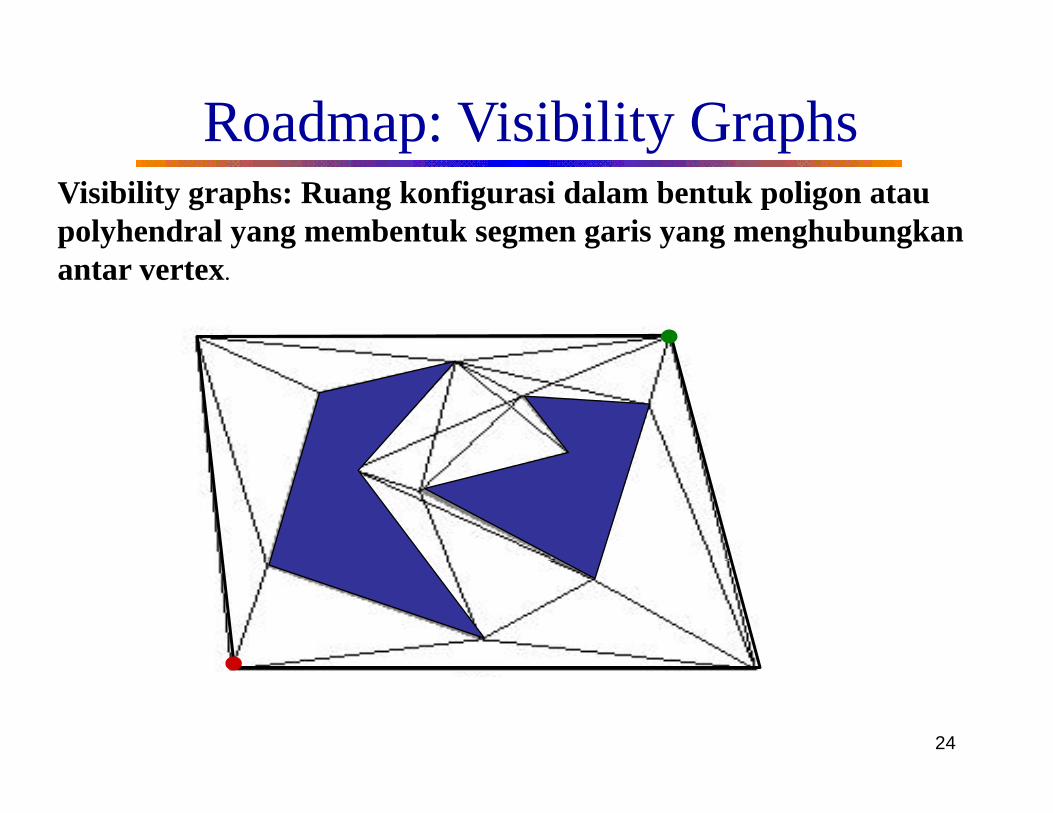
Roadmap: Visibility Graphsp y pVisibility graphs: Ruang konfigurasi dalam bentuk poligon atau polyhendral yang membentuk segmen garis yang menghubungkan antar vertex.
24
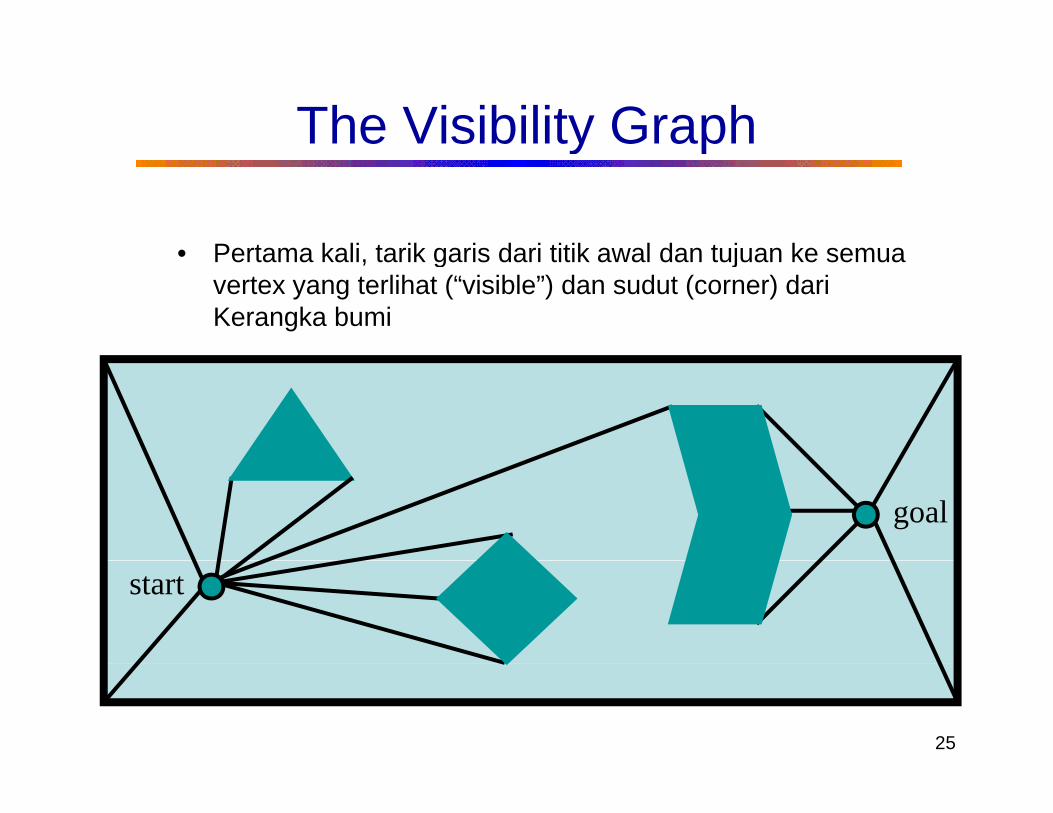
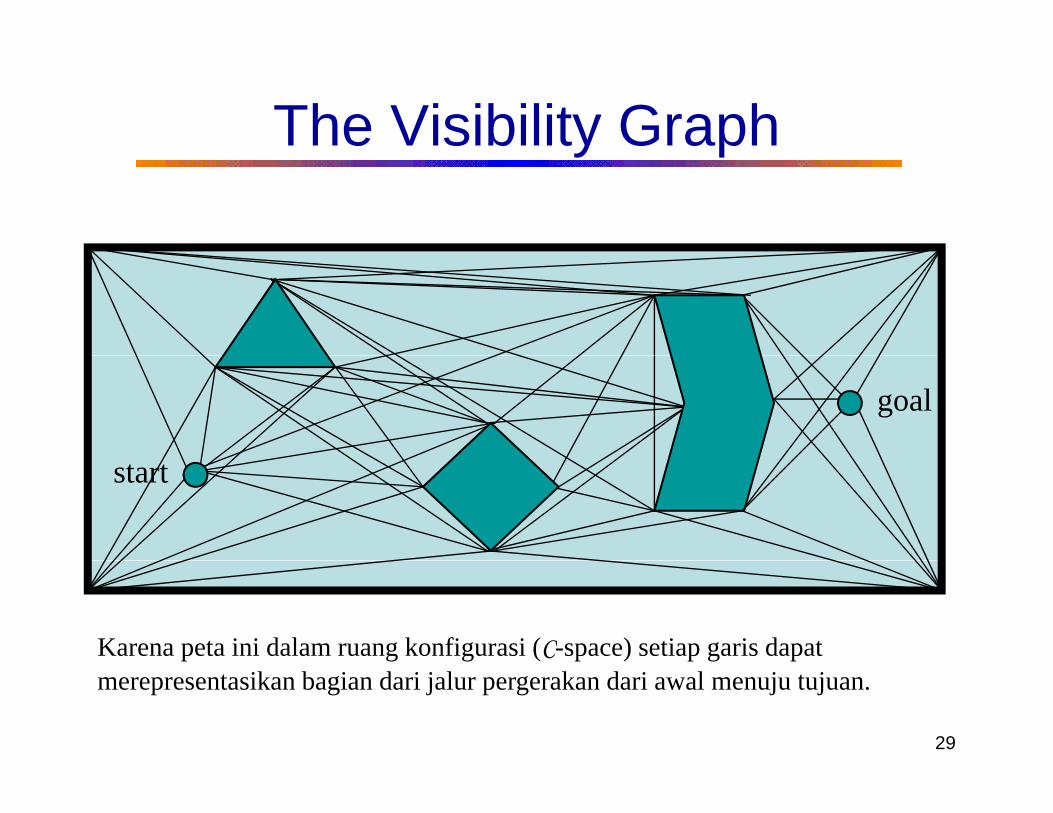
The Visibility Graph y p
• Pertama kali tarik garis dari titik awal dan tujuan ke semua• Pertama kali, tarik garis dari titik awal dan tujuan ke semua vertex yang terlihat (“visible”) dan sudut (corner) dari Kerangka bumi
goal
start
25
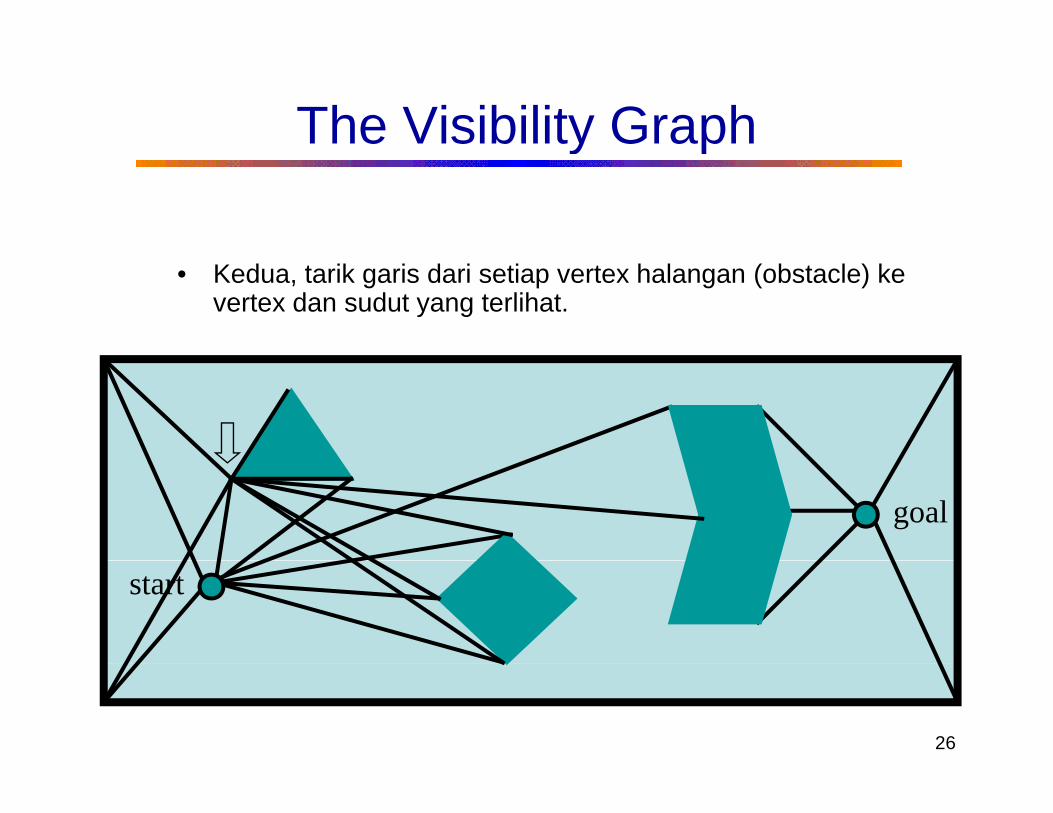
The Visibility Graphy p
• Kedua, tarik garis dari setiap vertex halangan (obstacle) ke vertex dan sudut yang terlihat.
goal
start
26
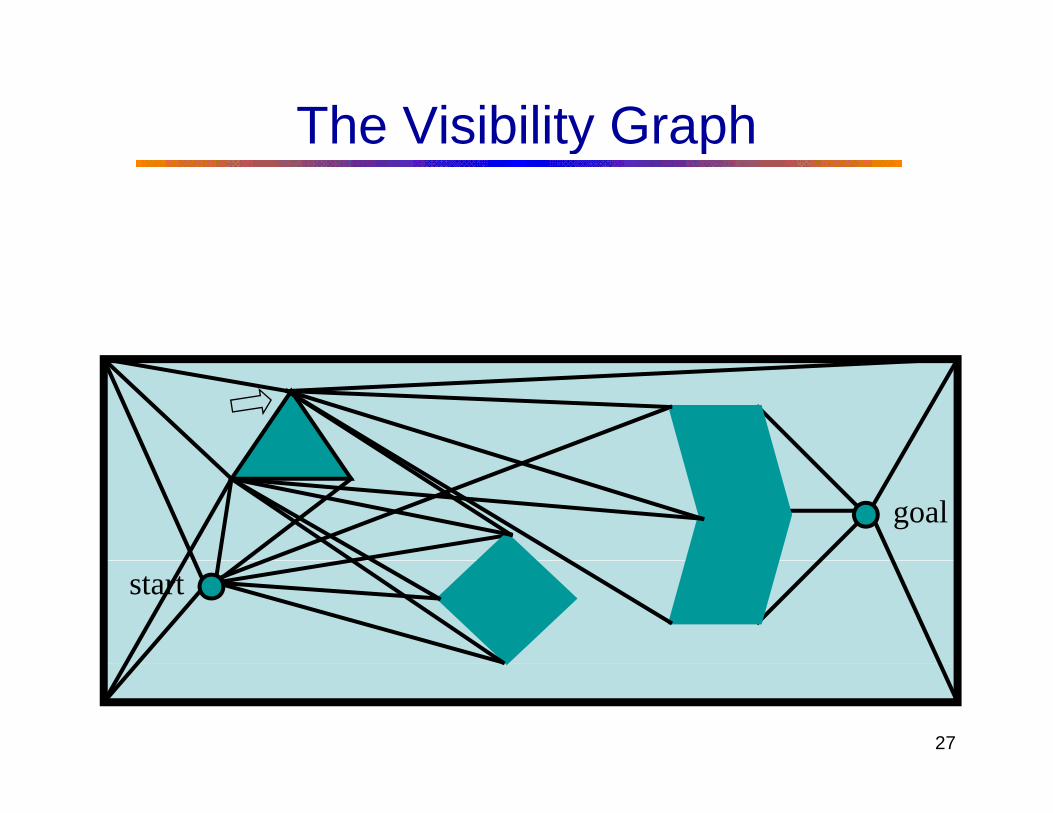
The Visibility Graphy p
goal
start
27
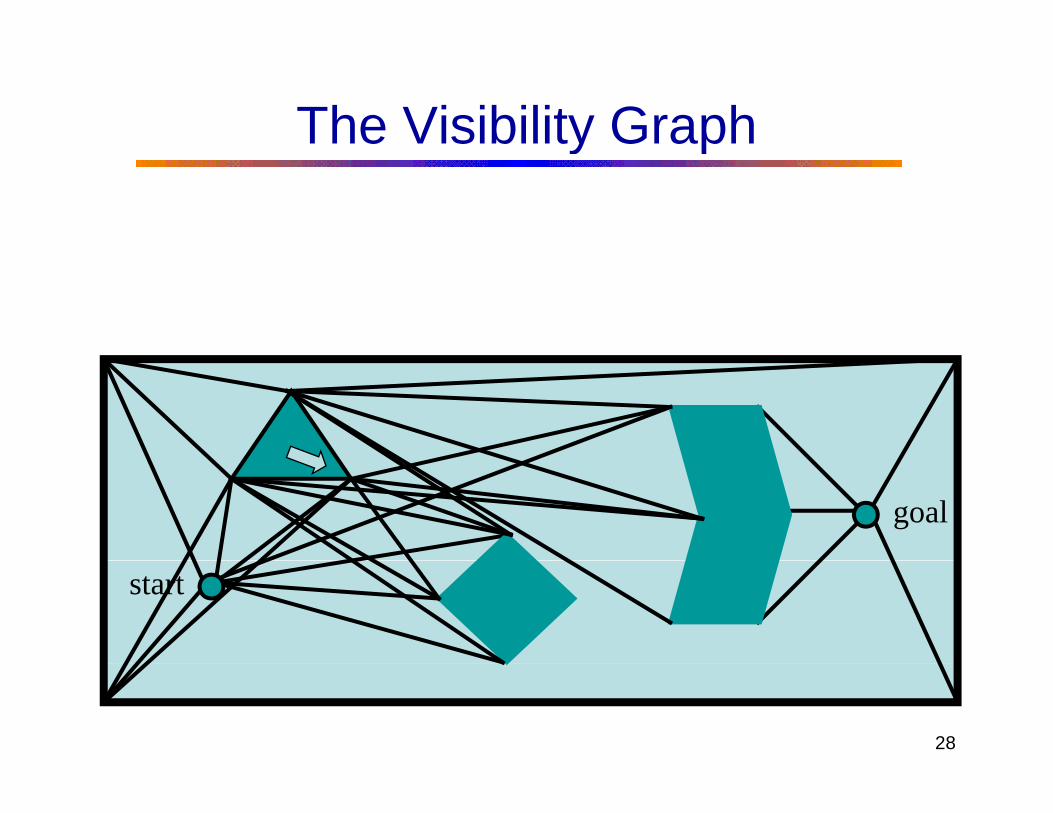
The Visibility Graphy p
goal
start
28
The Visibility Graph y p
goal
start
Karena peta ini dalam ruang konfigurasi (C-space) setiap garis dapat
29
merepresentasikan bagian dari jalur pergerakan dari awal menuju tujuan.
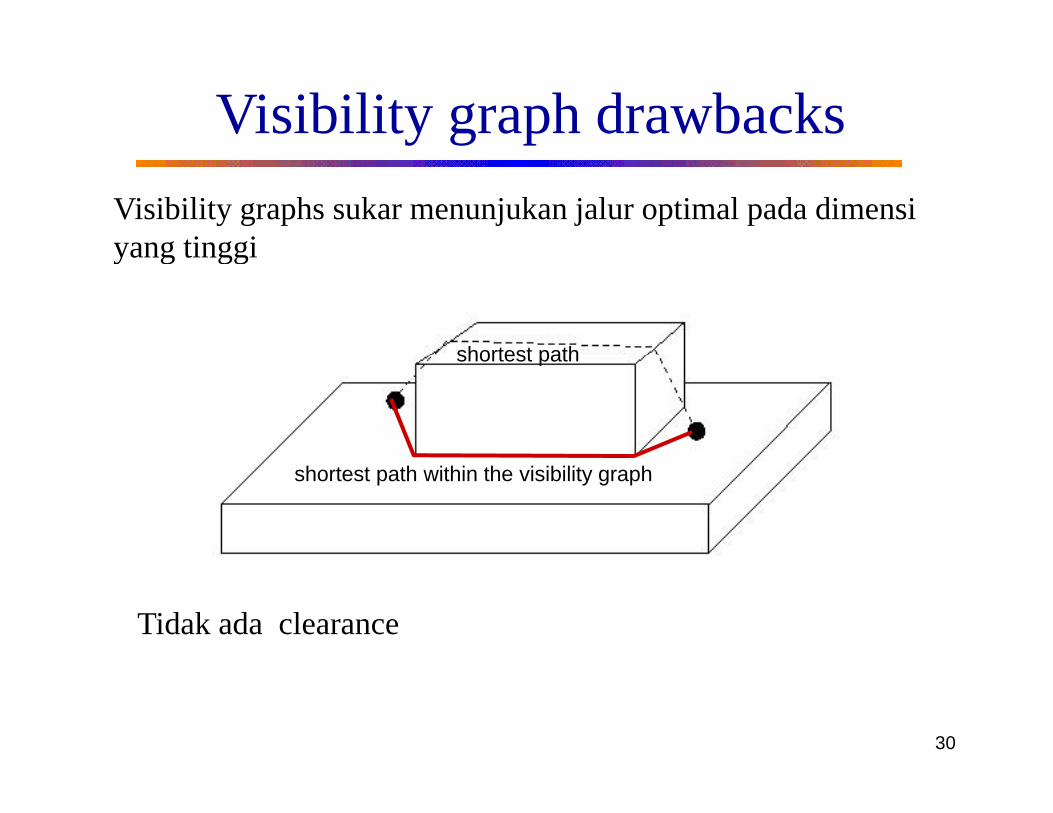
Visibility graph drawbacksVisibility graphs sukar menunjukan jalur optimal pada dimensi yang tinggiyang tinggi
shortest pathshortest path
shortest path within the visibility graph
Tidak ada clearance
30

31
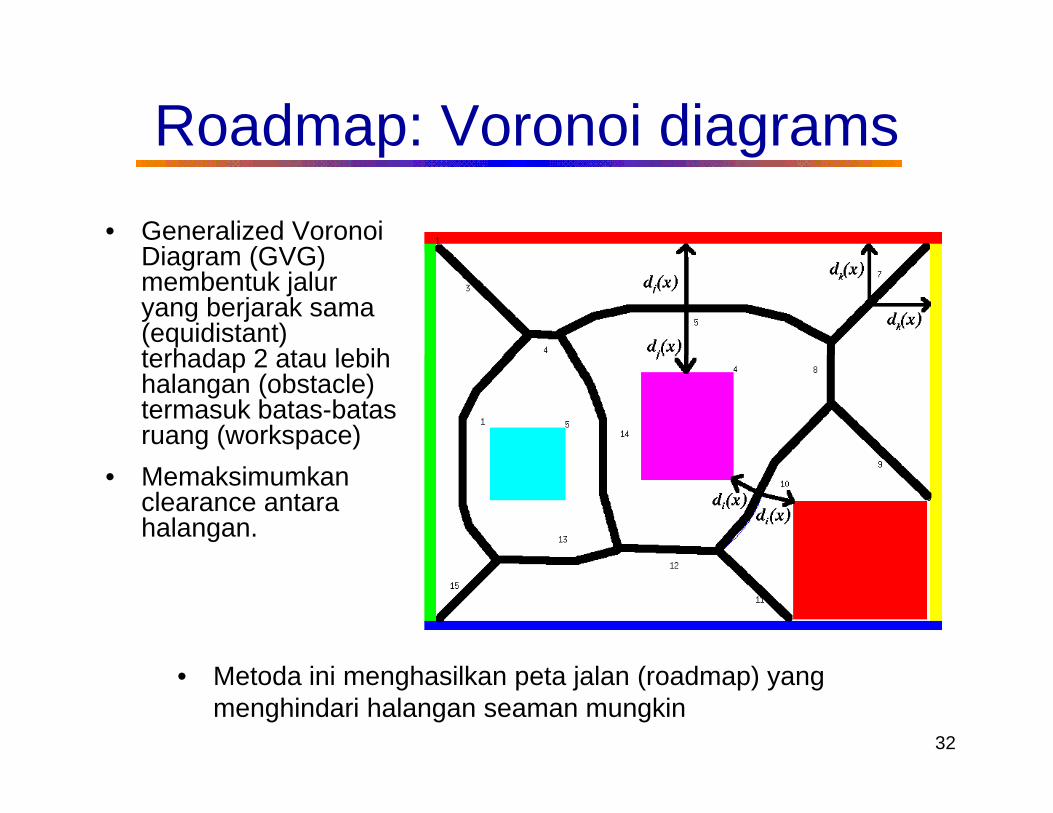
Roadmap: Voronoi diagramsp g• Generalized Voronoi
Diagram (GVG)Diagram (GVG) membentuk jalur yang berjarak sama (equidistant) terhadap 2 atau lebihterhadap 2 atau lebih halangan (obstacle) termasuk batas-batas ruang (workspace)
• Memaksimumkan clearance antara halangan.
32
• Metoda ini menghasilkan peta jalan (roadmap) yang menghindari halangan seaman mungkin
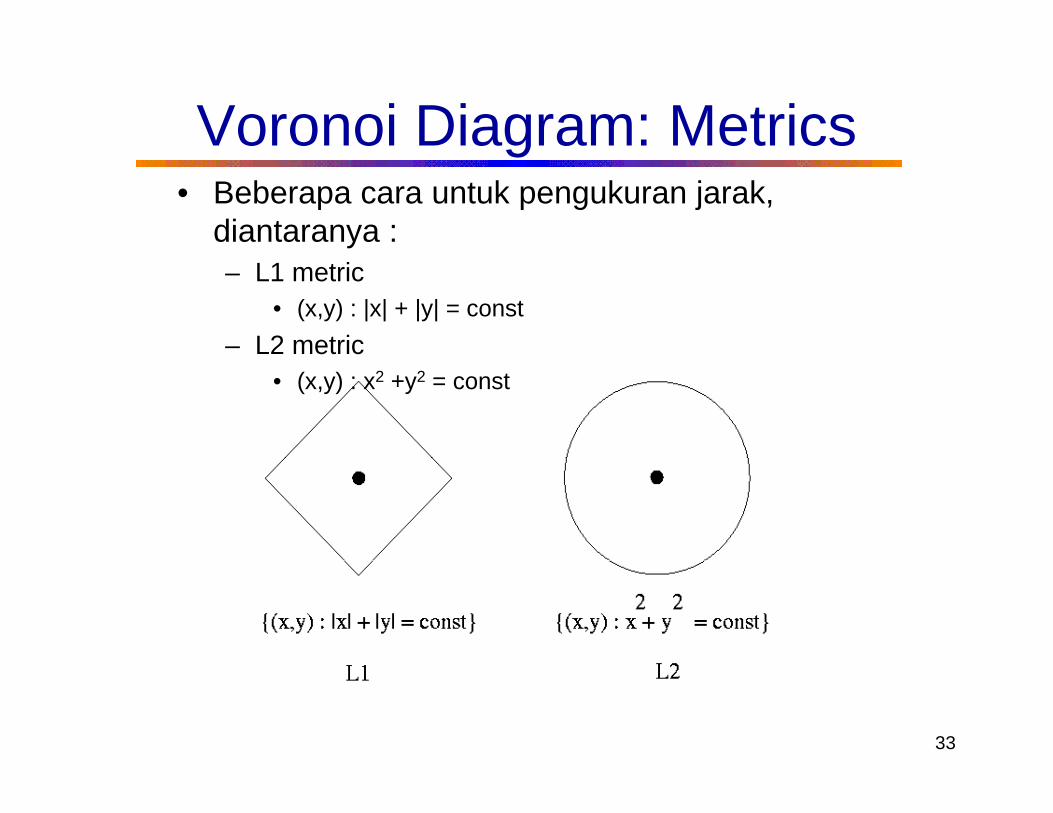
Voronoi Diagram: Metricsg• Beberapa cara untuk pengukuran jarak,
diantaranya :– L1 metric
• (x,y) : |x| + |y| = const– L2 metric
• (x,y) : x2 +y2 = const
33
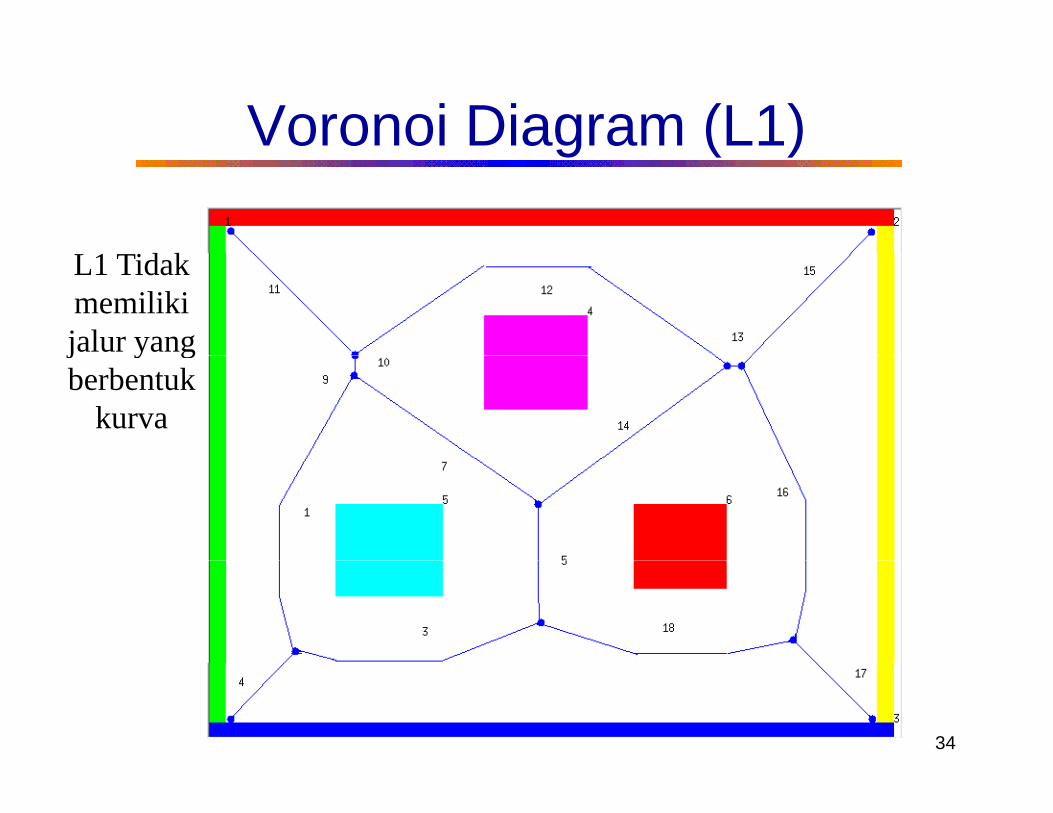
Voronoi Diagram (L1)g ( )
id kL1 Tidak memiliki jalur yang j y gberbentuk
kurva
34
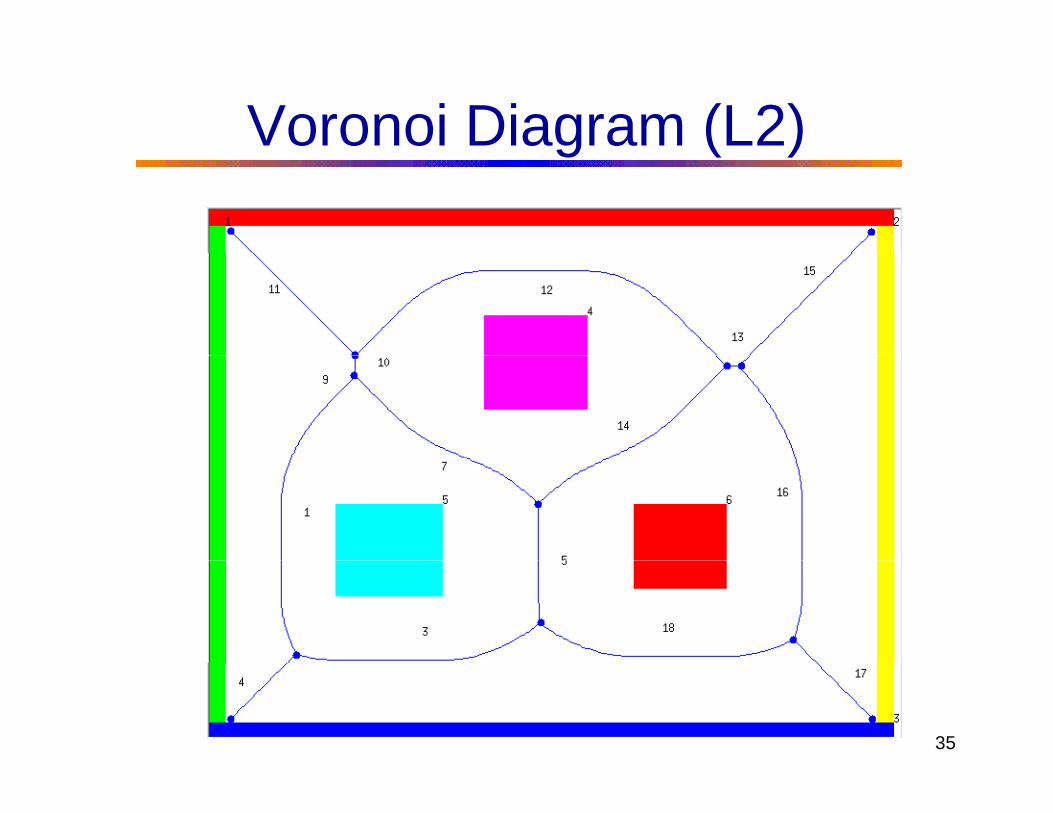
Voronoi Diagram (L2)g ( )
35
Metoda Perencanaan PergerakanRoadmap approaches
• Visibility Graph
• Voronoi Diagram
C ll d itiCell decomposition
• Exact Cell Decomposition (Trapezoidal)
• Approximate Cell Decomposition (Quadtree)
Potential Fields
Hybrid local/global
36
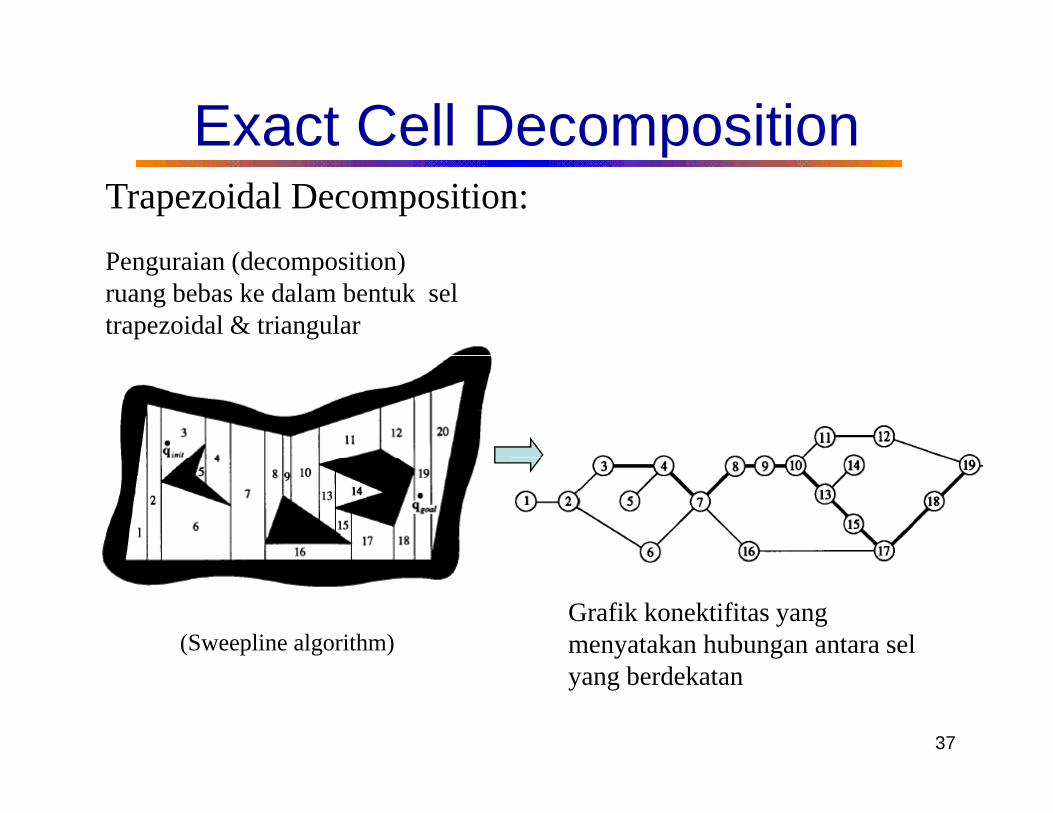
Exact Cell Decompositionp
P i (d i i )
Trapezoidal Decomposition:
Penguraian (decomposition) ruang bebas ke dalam bentuk sel trapezoidal & triangular
Grafik konektifitas yang menyatakan hubungan antara sel (Sweepline algorithm)
37
yang berdekatan
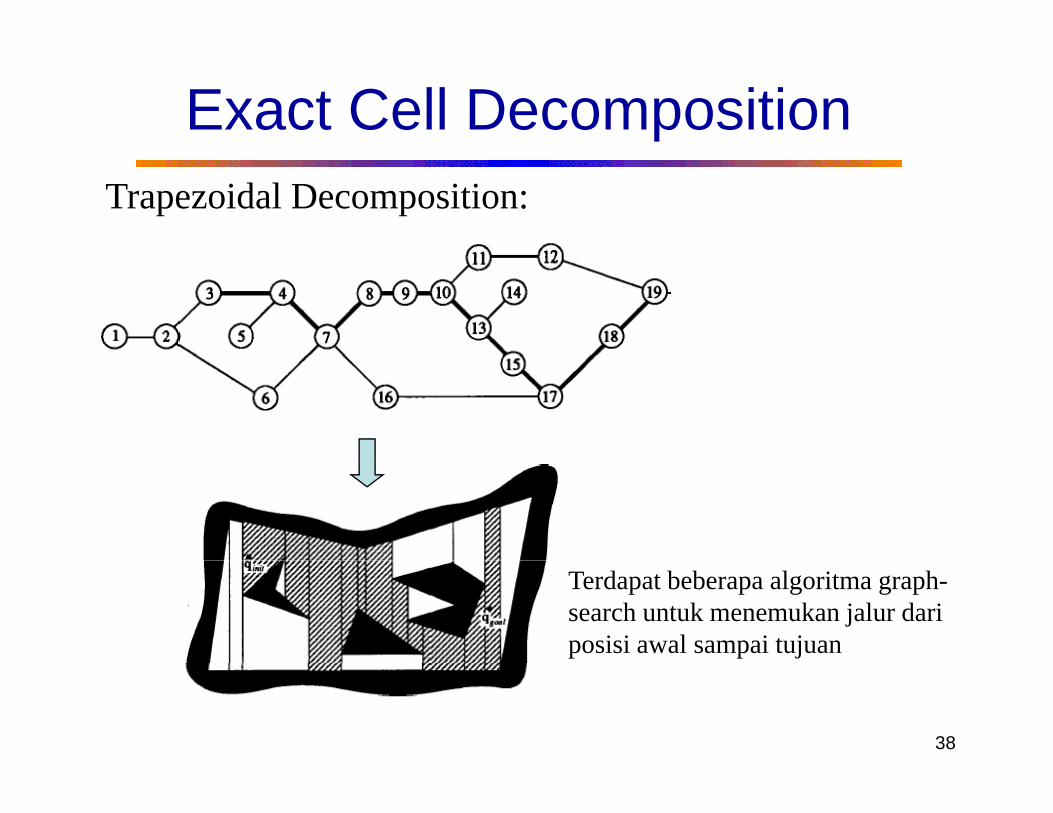
Exact Cell DecompositionTrapezoidal Decomposition:
Terdapat beberapa algoritma graph-search untuk menemukan jalur dari posisi awal sampai tujuan
38
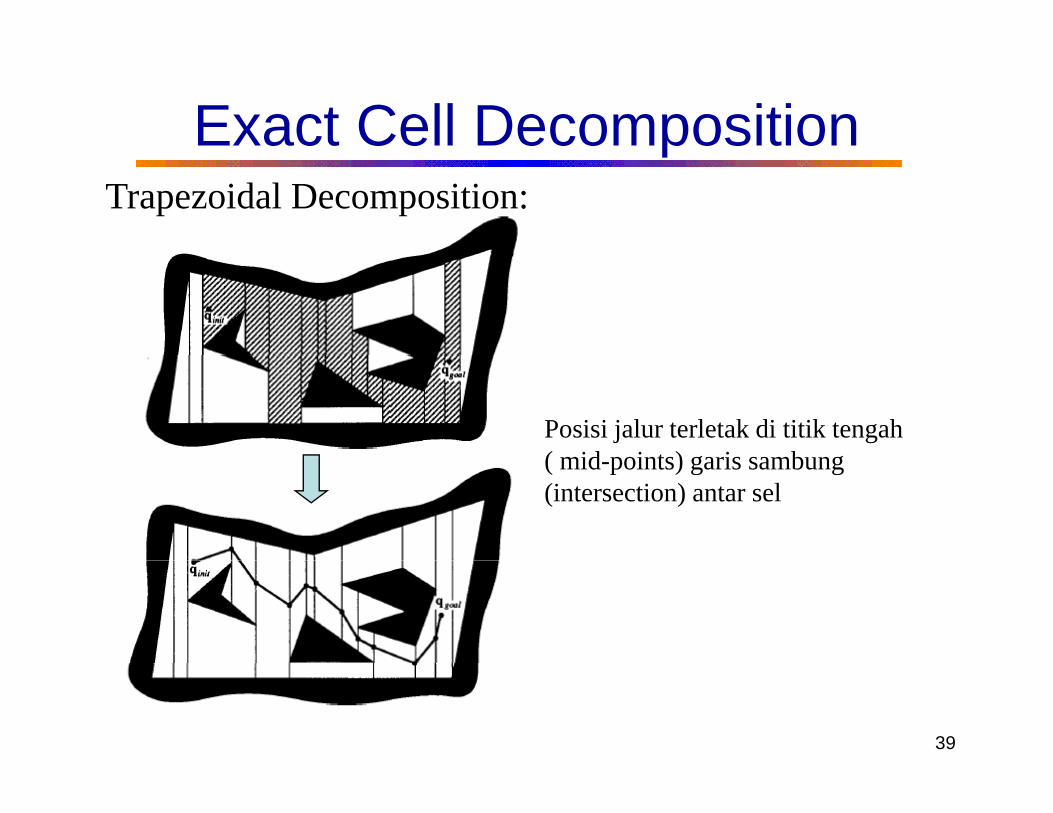
Exact Cell DecompositionpTrapezoidal Decomposition:
Posisi jalur terletak di titik tengah ( mid points) garis sambung( mid-points) garis sambung (intersection) antar sel
39
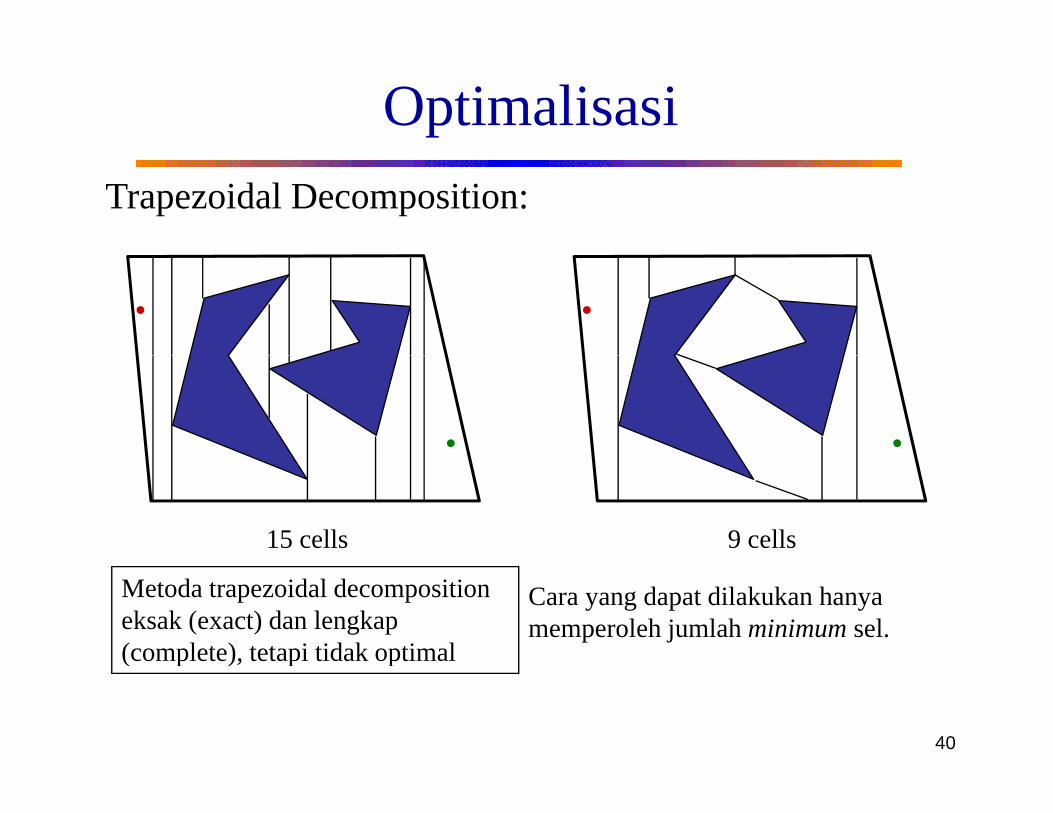
OptimalisasiTrapezoidal Decomposition:
15 cells 9 cells
Cara yang dapat dilakukan hanya memperoleh jumlah minimum sel.
Metoda trapezoidal decomposition eksak (exact) dan lengkap (complete), tetapi tidak optimal
40
( p ), p p
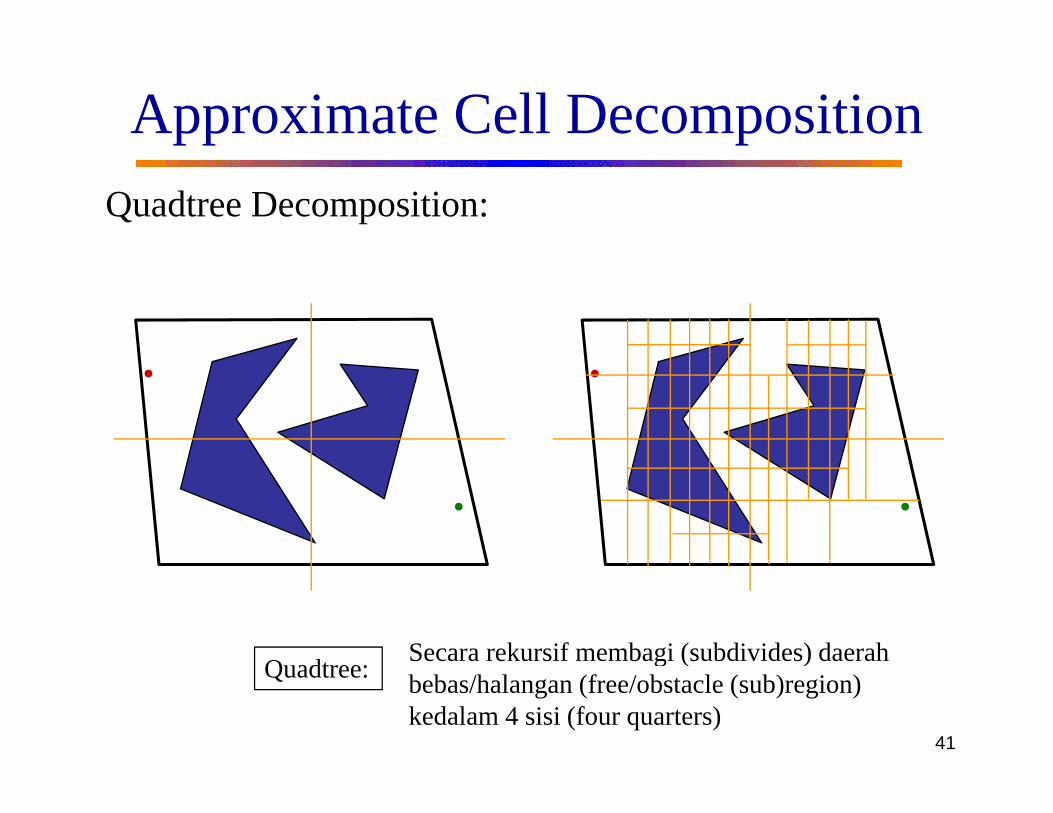
Approximate Cell DecompositionQuadtree Decomposition:
Secara rekursif membagi (subdivides) daerah Q dt
41
g ( )bebas/halangan (free/obstacle (sub)region) kedalam 4 sisi (four quarters)
Quadtree:
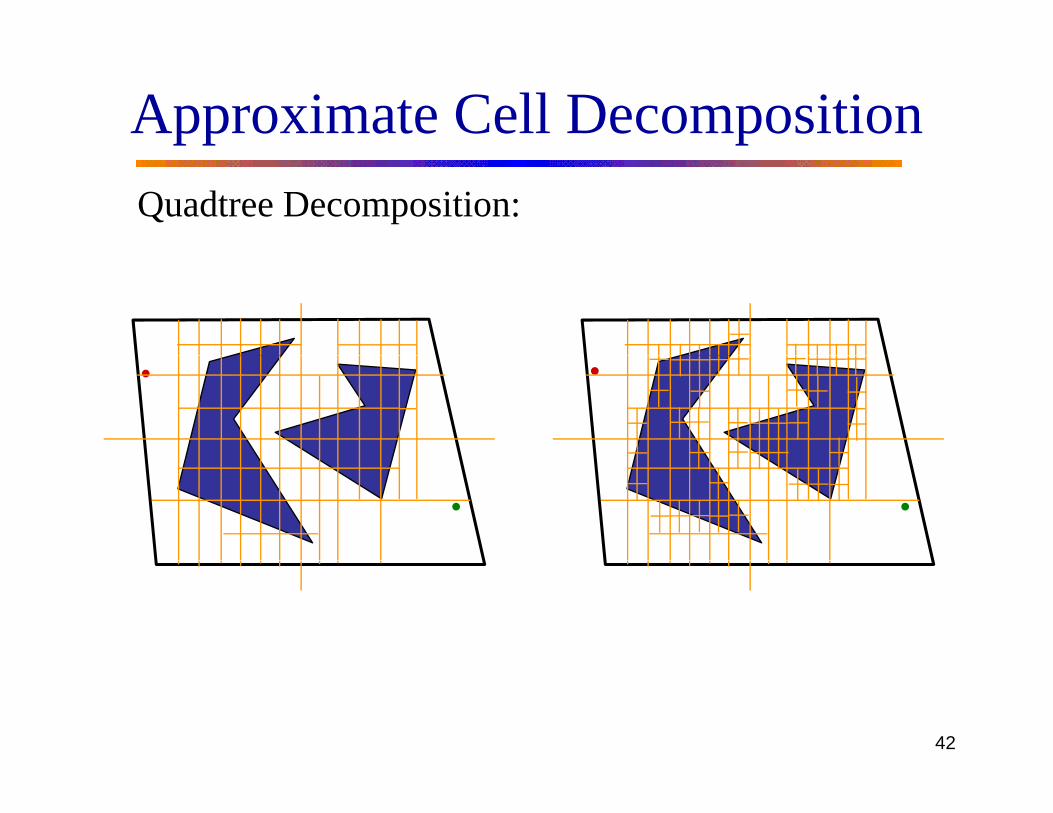
Approximate Cell DecompositionQuadtree Decomposition:
42
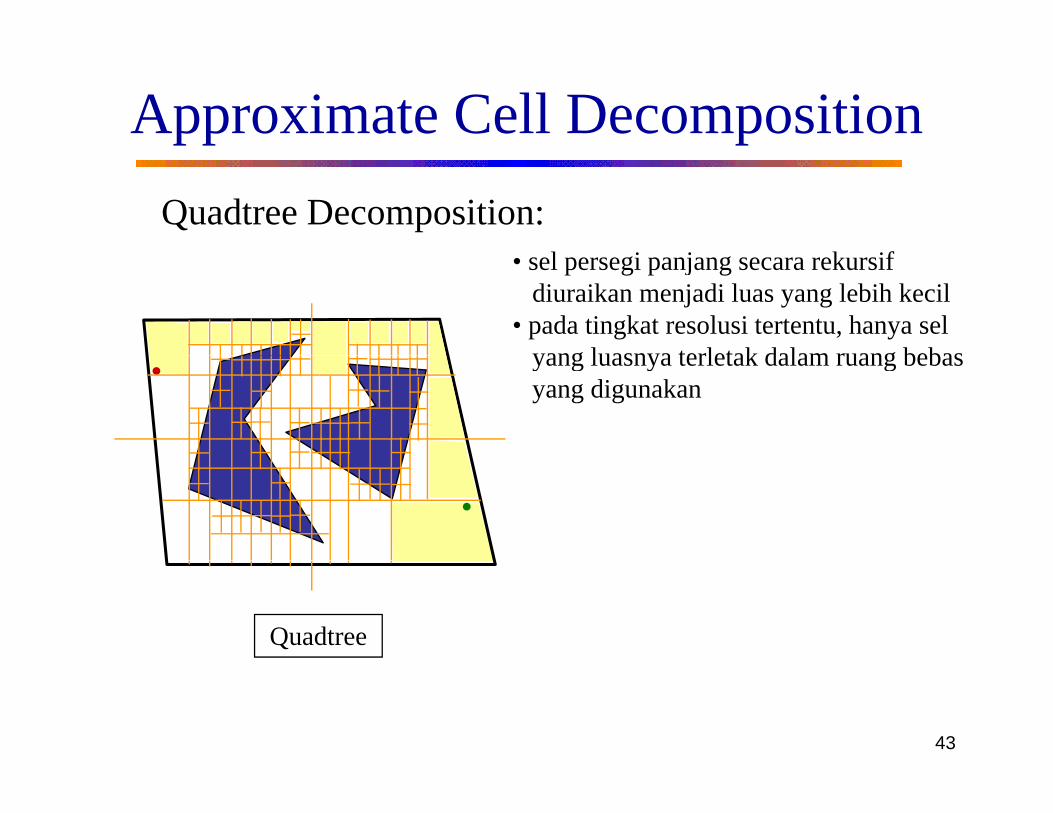
Approximate Cell DecompositionQuadtree Decomposition:
l i j k if• sel persegi panjang secara rekursif diuraikan menjadi luas yang lebih kecil
• pada tingkat resolusi tertentu, hanya sel yang luasnya terletak dalam ruang bebasyang luasnya terletak dalam ruang bebas yang digunakan
Quadtree
43
Metoda Perencanaan PergerakanRoadmap approaches
Cell decomposition
• Exact Cell Decomposition (Trapezoidal)
• Approximate Cell Decomposition (Quadtree)
Potential Fields
Hybrid local/global
44
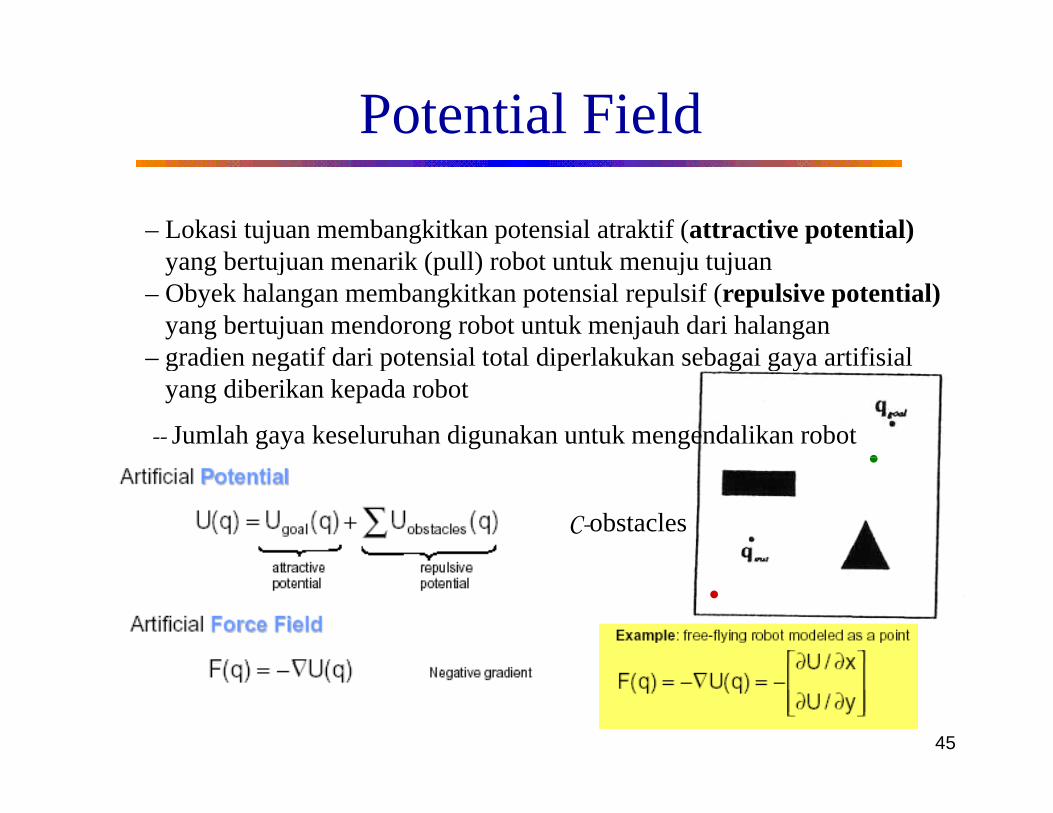
Potential Field
– Lokasi tujuan membangkitkan potensial atraktif (attractive potential)b j ik ( ll) b k j jyang bertujuan menarik (pull) robot untuk menuju tujuan
– Obyek halangan membangkitkan potensial repulsif (repulsive potential) yang bertujuan mendorong robot untuk menjauh dari halangan gradien negatif dari potensial total diperlakukan sebagai gaya artifisial– gradien negatif dari potensial total diperlakukan sebagai gaya artifisial yang diberikan kepada robot
-- Jumlah gaya keseluruhan digunakan untuk mengendalikan robot
C-obstacles
45
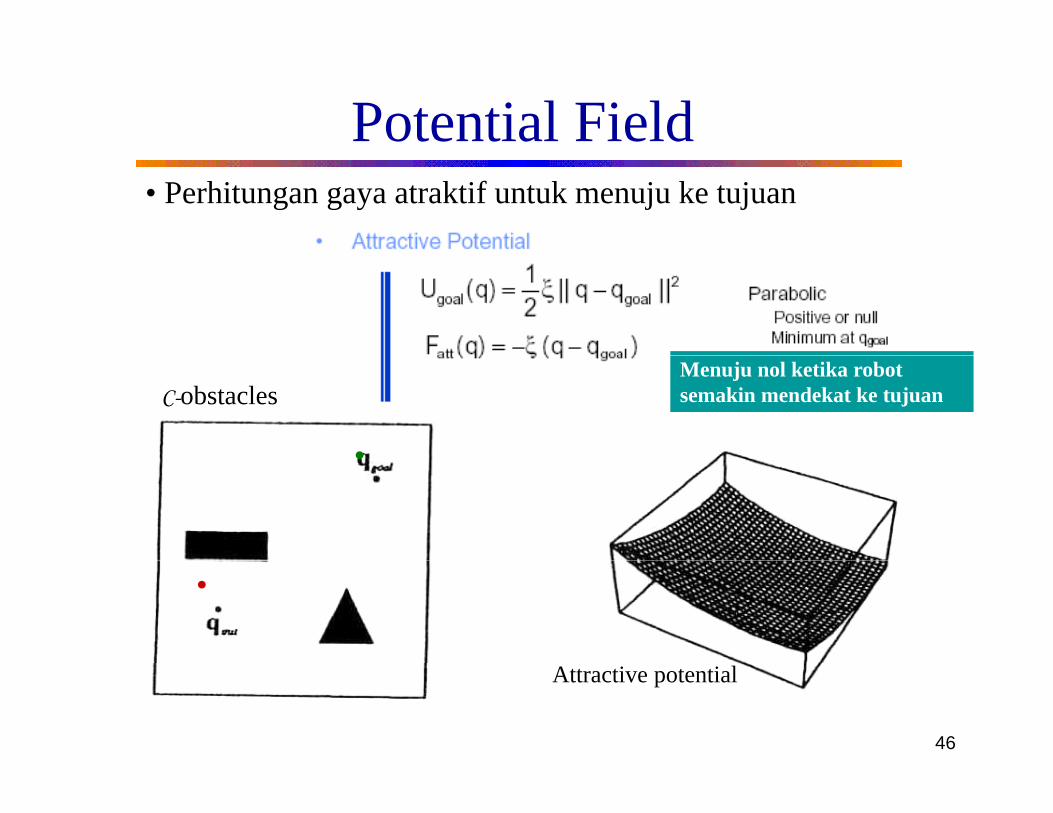
Potential Field• Perhitungan gaya atraktif untuk menuju ke tujuan
C-obstaclesMenuju nol ketika robot semakin mendekat ke tujuan
46
Attractive potential
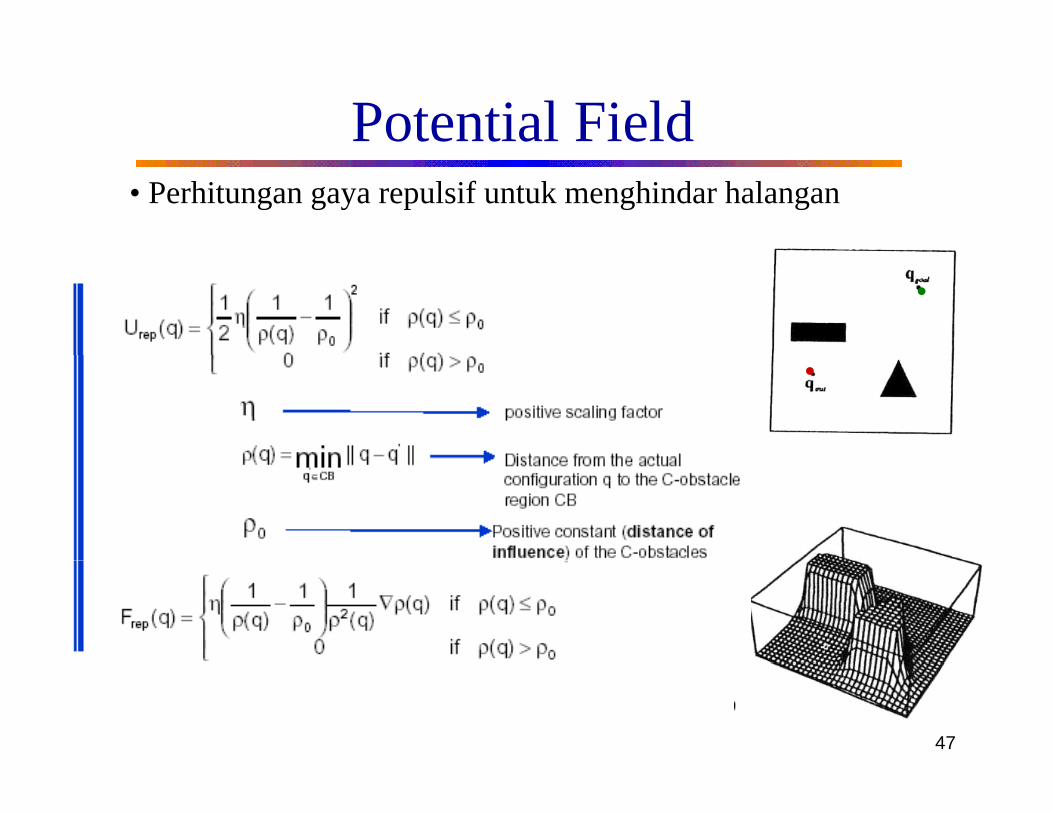
Potential Field• Perhitungan gaya repulsif untuk menghindar halangan
47
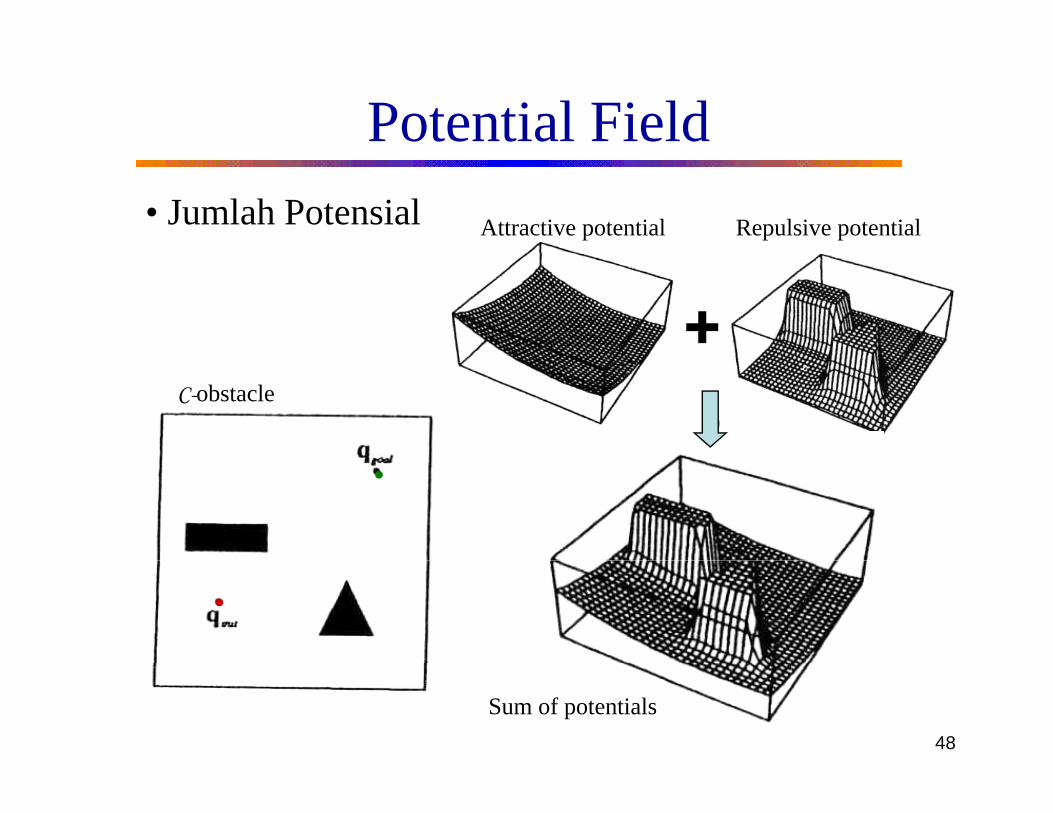
Potential Field• Jumlah Potensial Attractive potential Repulsive potential
C-obstacle
48
Sum of potentials
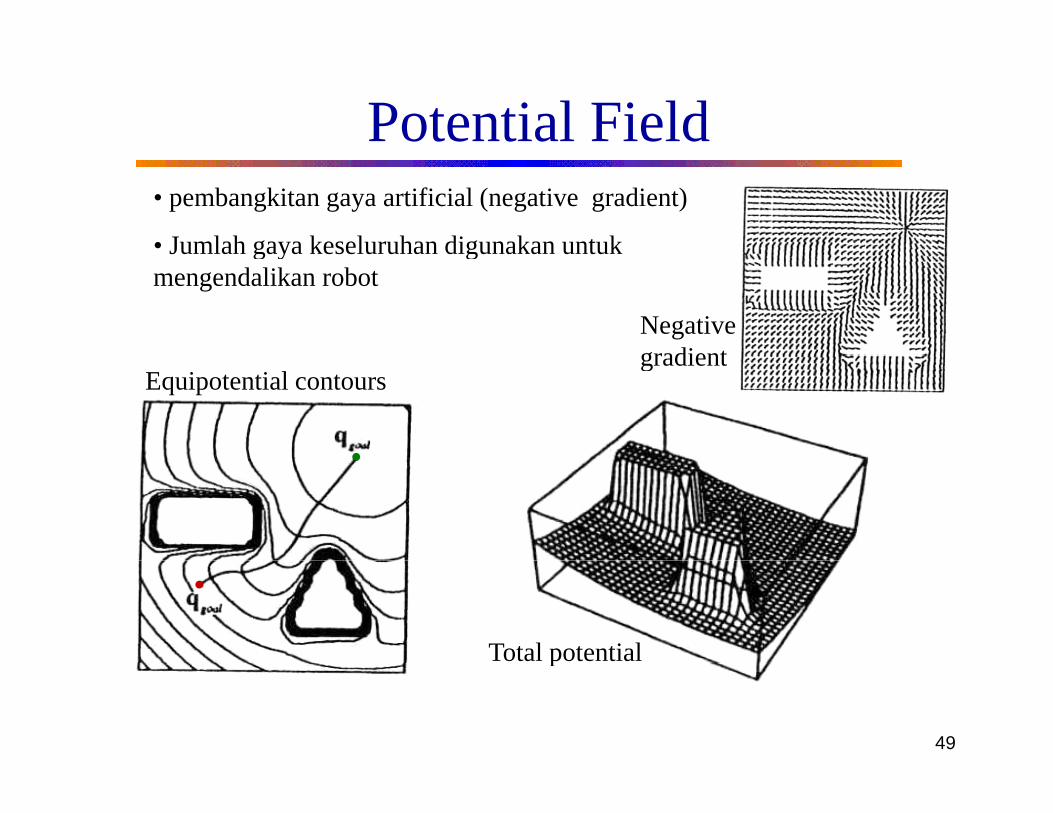
Potential Field• pembangkitan gaya artificial (negative gradient)
• Jumlah gaya keseluruhan digunakan untukJumlah gaya keseluruhan digunakan untuk mengendalikan robot
Negative gradient
Equipotential contoursgradient
Total potential
49
p
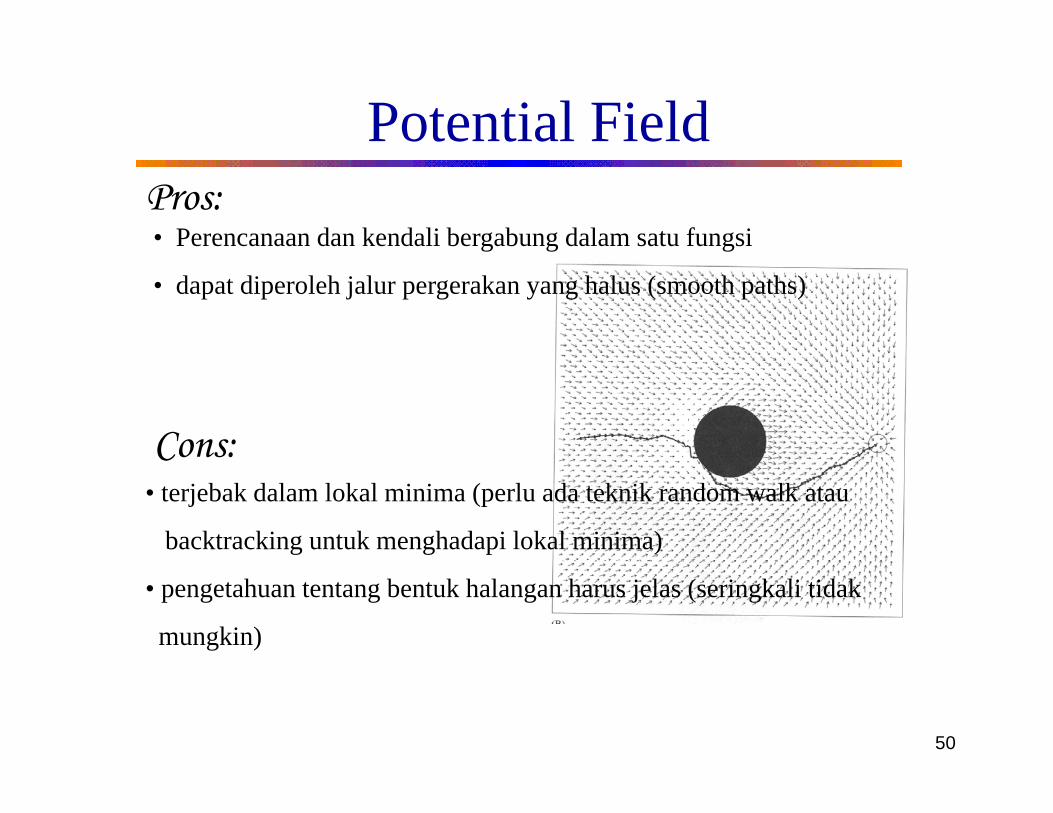
Potential Field
• Perencanaan dan kendali bergabung dalam satu fungsiPros:
• dapat diperoleh jalur pergerakan yang halus (smooth paths)
Cons:• terjebak dalam lokal minima (perlu ada teknik random walk atau
backtracking untuk menghadapi lokal minima)
C
• pengetahuan tentang bentuk halangan harus jelas (seringkali tidak
mungkin)
50
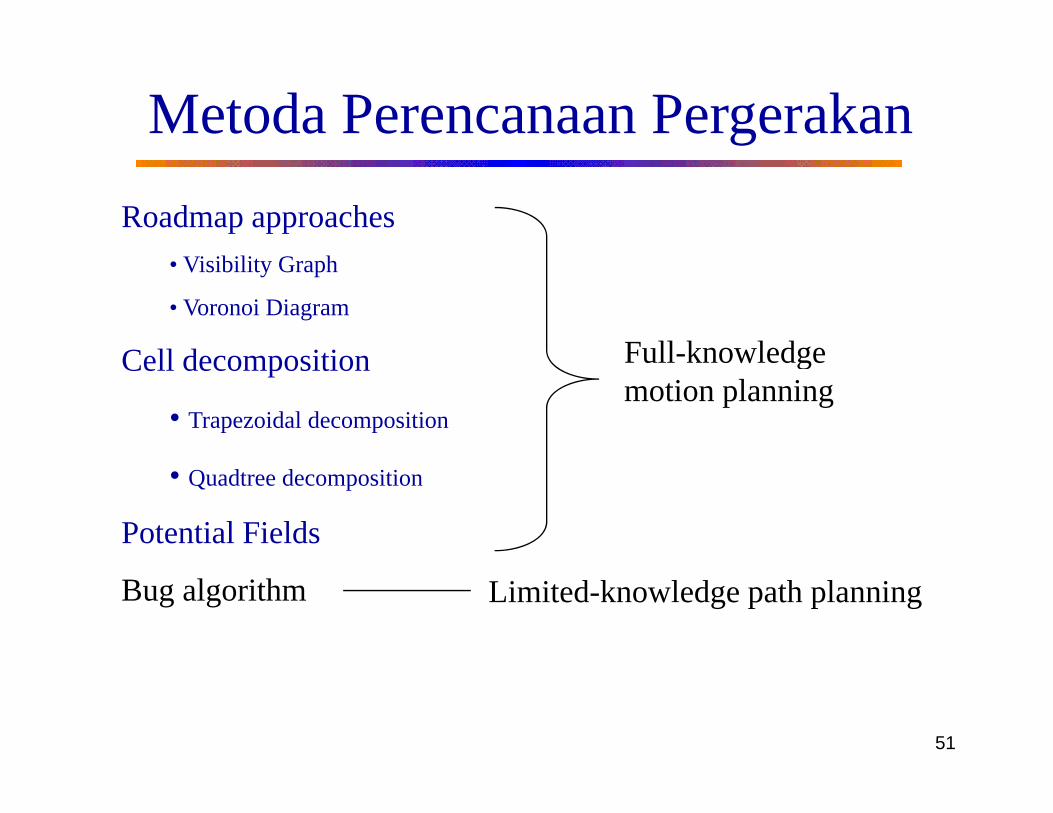
Metoda Perencanaan PergerakanRoadmap approaches
• Visibility Graph
• Voronoi Diagram
C ll d iti Full-knowledgeCell decomposition
• Trapezoidal decomposition
Full-knowledge motion planning
• Quadtree decomposition
Potential Fields
Bug algorithm Limited-knowledge path planning
51
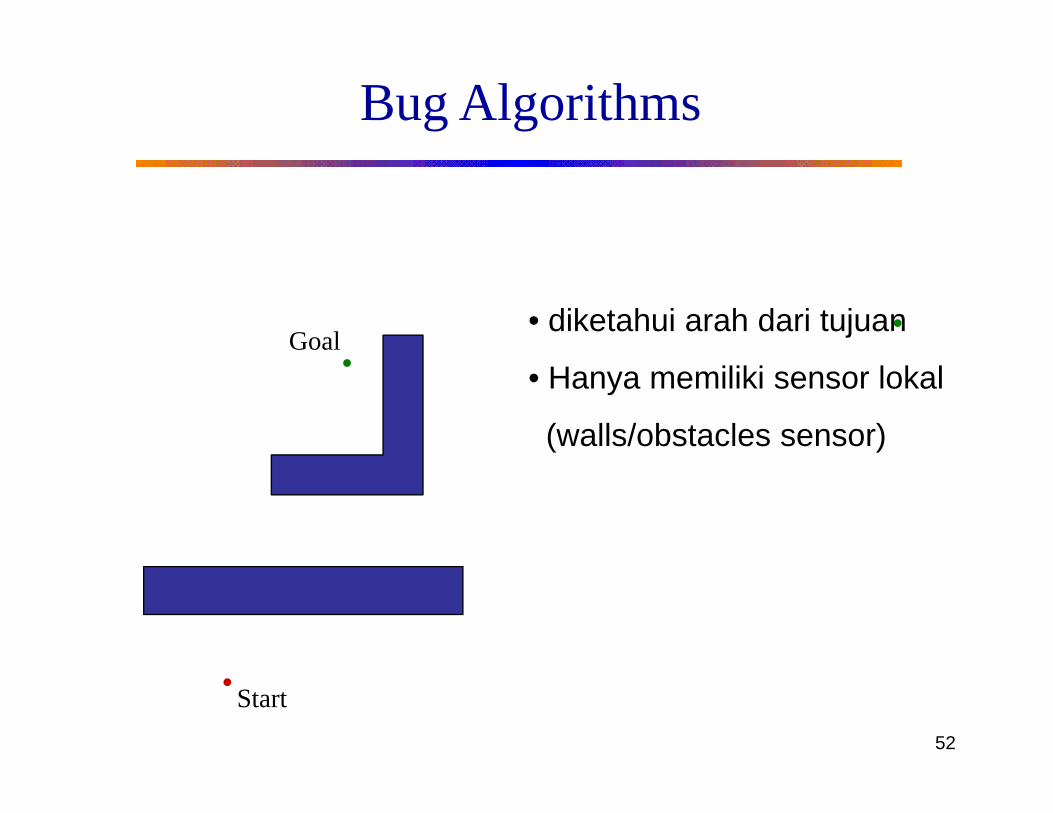
Bug Algorithms
Goal• diketahui arah dari tujuan
• Hanya memiliki sensor lokal
(walls/obstacles sensor)
52
Start
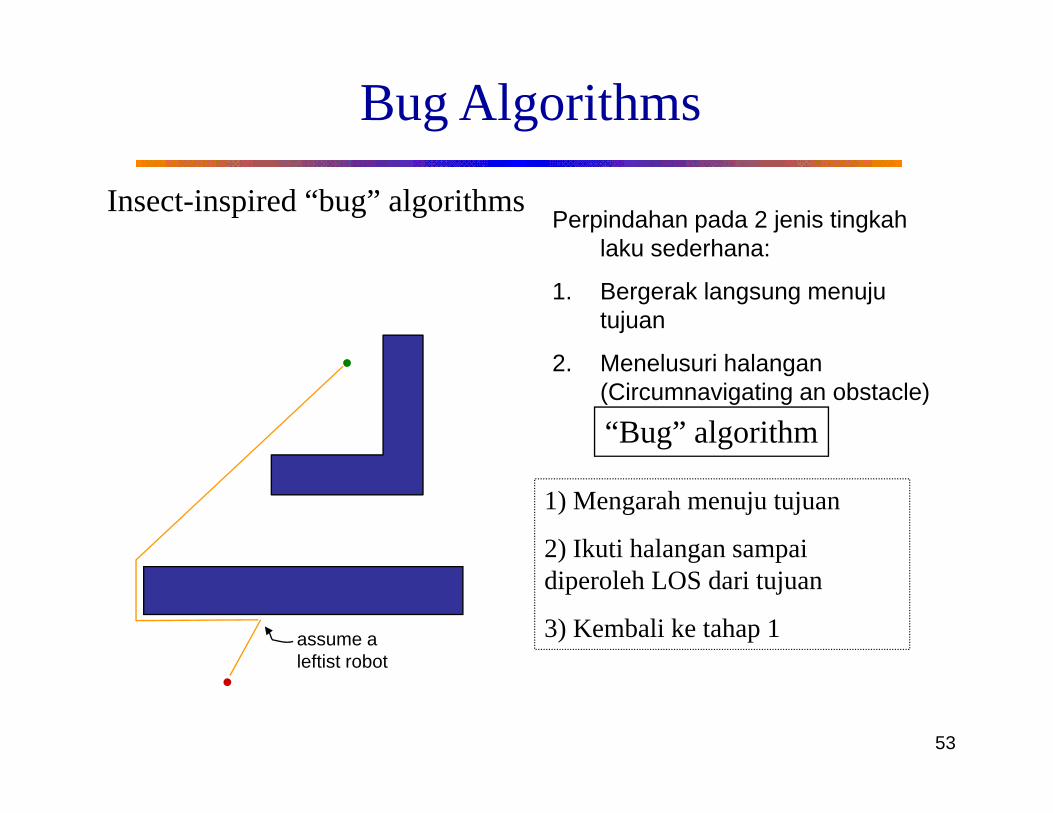
Bug Algorithms
Perpindahan pada 2 jenis tingkah laku sederhana:
Insect-inspired “bug” algorithmslaku sederhana:
1. Bergerak langsung menuju tujuan
2 M l i h l
“Bug” algorithm
2. Menelusuri halangan (Circumnavigating an obstacle)
1) Mengarah menuju tujuan
2) Ikuti halangan sampai ) g pdiperoleh LOS dari tujuan
3) Kembali ke tahap 1assume a leftist robot
53
leftist robot