laporan praktikum titik berat (2)
TRANSCRIPT
Kelompok 5
Riza Fahlevi Rizqi Zakaria Nur Rohmah Itsnawati Rudi Handoko Septian Ika Prasetya Shaffil Wildaan Siti Nurhayati

ABSTRAK
Kami melakukan percobaan untuk menentukan titik berat dari sebuah benda datar yang
tidak beraturan. Titik berat atau disebut juga pusat massa yaitu suatu titik dimana massa
sistem dapat dikonsentrasikan yang jika diberikan gaya pada titik tersebut maka sistem akan
bergerak translasi murni.
Tujuan dari percobaan ini adalah untuk menentukan titik berat benda datar tidak
beraturan. Percobaan ini dilakukan dengan cara menentukan tiga garis berat pada sisi yang
berbeda, kemudian menentukan titik perpotongan dari garis-garis berat tersebut. Titik
perpotongan dari beberapa garis berat adalah pusat massa atau titik berat benda.
Kata kunci: Vektor, Benda Tegar, Torsi, Momen Inersia, Titik Berat
KATA PENGANTAR
Puji syukur kami panjatkan kehadirat Allah SWT atas segala limpahan rahmat, taufiq,
hidayah, serta inayah-Nya, sehingga kami dapat melaksanakan kegiatan praktikum
menentukan titik berat bidang datar tak beraturan serta menyusun laporan kegiatan praktikum
menentukan titik berat.
Kegiatan praktikum bertujuan untuk menentukan titik berat atau pusat massa dari
sebuah benda/bidang datar yang bentuknya tidak beraturan (poligon). Metode yang digunakan
untuk menentukan titik berat benda adalah dengan metode garis berat. Sementara penyusunan
laporan kegiatan praktikum menentukan titik berat benda bertujuan untuk melaporkan
struktur, proses, hasil, dan kesimpulan yang kami peroleh dari kegiatan praktikum kami.
Keberhasilan kami dalam melaksanakan praktikum serta menyelesaikan penyusunan
laporan praktikum tidak lepas dari dukungan serta bantuan langsung dari berbagai pihak.
Maka dari itu, kami mengucapkan terima kasih dan penghargaan yang setinggi-tingginya
kepada:
1.) Kepala SMA Negeri Ajibarang, Bapak Drs.Arif Priadi, M,Ed Terima kasih kami ucapkan
atas bimbingan dan dukungan yang senantiasa diberikan kepada seluruh stakeholders
demi pembangunan sekolah kita tercinta;
2.) Bapak dan Ibu Guru SMA Negeri Ajibarang. Terima kasih kami ucapkan dan
penghargaan yang setinggi-tingginya atas didikan, motivasi, serta ilmu yag senantiasa
ditularkan kepada kami sepanjang waktu;
3.) Orang tua kami tercinta, Ayah dan Bunda yang telah membesarkan dan mendidik kami.
Terima kasih atas do’a yang selalu kalian panjatkan demi kesuksesan kami serta dukungan
yang tiada henti;
4.) Guru mata pelajaran Fisika kelas XI selaku pembimbing kegiatan praktikum kami, Bapak
Drs. Kusno. Terima kasih yang sebanyak-banyaknya serta penghargaan yang setinggi-
tingginya atas bimbingan, tuntunan, didikan, serta motivasi tiada henti yang selalu Bapak
berikan pada kami;
5.) Siswa-siswi SMA Negeri Ajibarang, khususnya siswa-siswi kelas XI-IPA 2. Yang
senantiasa menemani kami menjalani hari-hari dalam suka dan duka. Terima kasih kami
sampaikan atas dukungan yang senantiasa kawan berikan.

6.) Pihak-pihak lan yang turut mendukung dan membantu kegiatan praktikum dan
penyusunan laporan yang tidak dapat kami sebutkan satu per satu. Terima kasih dan
penghargaan yang setinggi-tingginya atas dukungan dan bantuan anda.
Kami berharap agar kegiatan praktikum dan laporan yang sederhana ini tidak
hanya sekedar untuk memenuhi tugas belaka. Namun seyogyanya laporan ini dapat
memberikan manfaat yang lebih bagi kami sebagai penyusun serta bagi pembaca
sekalian untuk menambah khazanah pengetahuan keilmuan.
Kami telah berusaha semaksimal mungkin agar laporan ini dapat disusun
sedemikian baik, namun kami tentu menyadari masih terdapat banyak kekurangan dan
kekeliruan. Maka, kami sangat mengharapkan kritik dan saran dari para pembaca dan
pengguna laporan ini demi perbaikan pada penyusunan laporan-laporan selanjutnya.
Ajibarang, Januari 2012
Penyusun

MOTTO
”Hidup adalah drama penuh improvisasi,tanpa scenario,tanpa tahu apa yang akan
terjadi, siapa yang akan kau temui, atau tempat-tempat mana yang akan kau pijak. Katakan
“ya”. Dan jika kau beruntung, kau akan bertemu dengan seseorang yang akan mengatakan
“ya” kembali padamu. Apakah dengan berkata “ya” bisa mengantarkanmu pada kesulitan?
Apakah dengan berkata “ya” bisa menyebabkan kau melakukan suatu kesalahan? Ya,tentu
bisa. Tapi jangan takut membuat kesalahan. Ingat, kau tak bisa menjadi muda dan bijak
dalam waktu bersamaan. Orang muda yang berlagak bijak dan mengerti tentang hidup,
kebanyakan adalah orang-orang sinis. Merka tidak akan belajar apapun. Karena sikap sinis
berarti membutakan diri sendiri,penolakan terhadap dunia luar karena selalu ketakutan jika
dunia luar akan menyakiti dan mengecewakan. Orang-orang sinis selalu berkata “tidak”.
Tetapi dengan berkata “ya” berarti memulai sesuatu yang baru. Berkata “ya”
mengantarkanmu pada pengetahuan baru. Jadi, selama kau mempunyai kekuatan, katakan
“ya”
.:: Stephen Colbert
DAFTAR ISI
Halaman Judul...........................................................................................................
Kata Pengantar...........................................................................................................
Motto..........................................................................................................................
Daftar isi.....................................................................................................................
BAB I PENDAHULUAN
1. Latar Belakang2. Rumusan Masalah3. Tujuan Praktikum4. Manfaat Praktikum
BAB II LANDASAN TEORI
A. Analisis VektorB. Kinematika RotasiC. Dinamika RotasiD. Titik BeratE. Kesetimbangan Benda Tegar
BAB III METODOLOGI PRAKTIKUM
A. Alat dan Bahan PraktikumB. Desain PraktikumC. Pengolahan dan Analisis Data
BAB IV HASIL PRAKTIKUM DAN PEMBAHASAN
A. Proses PraktikumB. Bidang Datar Tak BeraturanC. Data Hasil PraktikumD. Pembahasan
BAB V PENUTUP
A. Tes KomprehensifB. Tes FormatifC. KesimpulanD. Saran
DAFTAR PUSTAKA................................................................................................

BAB I
PENDAHULUAN
A.Latar Belakang
Perkembangan Sains semakin pesat seiring dengan semakin meningkatnya taraf
hidup manusia di era modernisasi. Sains semakin mantap kedudukannya dalam
kehidupan manusia, tidak sekedar untuk menjelaskan dan mempelajari fenomena-
fenomena alam, tetapi tendensinya semakin mengarah ke aplikasi dalam berbagai
produk teknologi dari hasil pengembangan dan pengkajian penemuan-penemuan dan
teori-teori yang telah diungkap manusia. Sebagai rujukan, adalah bagaimana teori-teori
tentang gelombang elektromagnetik yang pada awalnya hanya sekedar rumusan-
rumusan matematis, sekarang telah membawa revolusi dalam kehidupan dan budaya
manusia setelah diaplikasikan ke dalam berbagai produk teknologi yang senantiasa
dikembangkan, seperti gelombang radio untuk telekomunikasi dan kepentingan militer,
sinar-X dan sinar gamma digunakan dalam teknologi medis. Kemajuan ilmu-ilmu murni
telah menjadi sumber bagi ilmu-ilmu terapan seiring semakin bijak dan berkembangnya
dimensi pemikiran manusia.
Selama ini kebanyakan orang di Indonesia adalah pelanggan setia dari produk-
produk teknologi yang berkembang sedemikian pesatnya. Mereka adalah objek statis,
konsumen dari produk-produk teknologi yang jarang berpikir bagaimanakah prinsip
kerja dari produk-produk teknologi yang mereka gunakan. Apalagi berinisiatif untuk
menciptakan inovasi dalam bidang teknologi sains.
Urgensi yang krusial saat ini adalah bagaimana menciptakan atmosfer courage
and interest terhadap perkembangan teknologi terutama bagi generasi muda. Tidak
sekedar mengikuti perkembangan teknologi, tetapi juga mampu menguasai,
memanfaatkan, serta diharapkan mampu memberikan sumbangsih bagi perkembangan
teknologi. Jalan terbaik agar dapat menguasai, memanfaatkan, serta menciptakan
inovasi teknologi adalah dengan mempelajari, menguasai, dan menerapkan Sains.
Dalam mempelajari Sains, langkah awal yang terbaik adalah dengan mempelajari
dasar-dasar sains. Dasar-dasar tersebut berupa konsep dan prinsip suatu fenomena alam
dalam sebuah disiplin ilmu. Konsep-konsep dan prinsip tersebut merupakan konsep dan
prinsip yang ilmiah, yang menjelaskan fenomena-fenomena dalam kehidupan sehari-
hari.Tahap selanjutnya yang sangat krusial adalah menerapkan konsep-konsep dan
prinsip-prinsip tersebut untuk menjelaskan prinsip kerja dari suatu produk teknologi.
Bahkan, bagi siswa yang memiliki kreativitas dan pemikiran ilmiah, mengaktualisasikan
diri untuk menciptakan inovasi produk teknologi berdasarkan konsep dan prinsip ilmiah
yang telah dikuasai merupakan langkah emas menuju teciptanya sumber daya unggul.
Semangat dan motivasi untuk mempelajari dan menguasai konsep dan prinsip
ilmiah yang menjelaskan fenomena natural dalam kehidupan sehari-hari adalah pemicu
yang mendorong kami untuk mempelajari konsep dan prinsip titik berat dalam disiplin
ilmu Fisika. Diharapkan, setelah mempelajari konsep dan prinsip titik berat, kami dapat
menguasai konsep dan prinsip tersebut, kemudian mengaplikasikannya dalam keidupan
sehari-hari agar mendatangkan manfaat.
Konsep titik berat, yang berhubungan erat dengan dinamika rotasi dan
kesetimbangan benda tegar adalah konsep yang sangat penting dan diterapkan secara
meluas di berbagai bidang dalam kehidupan manusia. Hal itulah yang menarik minat
kami untuk mempelajarinya. Penerapan dari konsep titik berat meliputi bidang
arsitektur, teknik sipil, olahraga, dan banyak bidang lainnya.Sehingga penguasaan
konsep titik berat dapat memberikan prospek bagi pilihan karier di masa depan.
B. Rumusan Masalah
Berdasarkan latar belakang yang telah dijelaskan sebelumnya, maka rumusan
masalah dari kegiatan praktikum ini adalah:
1. Bagaimana cara menentukan titik berat dari suatu benda datar yang bentuknya tidak
beraturan?
2. Bagaimana hubungan antara titik berat suatu benda dengan titik berat dari bagian-
bagian benda yang dipisahkan kemudian digabungkan kembali?
3. Bagaimana cara menentukan titik berat sistem benda yang merupakan gabungan dari
beberapa benda?

C.Tujuan Praktikum
Berdasarkan Rumusan Masalah diatas, kegiatan praktikum menentukan titik berat
benda datar tak beraturan dan penulisan laporan kegiatan praktikum memiliki beberapa
tujuan, yaitu:
1. Tujuan Umum (Tujuan Kegiatan Praktikum)
Kegiatan Praktikum menentukan titik berat benda datar tak beraturan bertujuan:
a. Untuk menentukan titik berat suatu benda datar tak beraturan dengan metode
menentukan beberapa garis berat yang saling berpotongan pada suatu titik;
b. Untuk membuktikan bahwa titik berat suatu sistem benda sama dengan titik berat
dari gabungan benda-benda yang merupakan hasil pemisahan dari sistem benda
tersebut.
2. Tujuan Khusus
Kegiatan praktikum menentukan titik berat suatu benda datar tak beraturan dan
laporan kegiatn praktikum tersebut bertujuan untuk memenuhi tugas mata pelajaran
Fisika bab Kesetimbangan Benda Tegar, serta untuk mengaktualisasikan diri dalam
aktifitas akademik ilmiah secara mandiri.
D.Manfaat Penelitian
Dengan tercapainya tujuan dari kegiatan praktikum dan penulisan laporan
praktikum, maka manfaat yang dapat diperoleh adalah sebagai berikut:
1. Dapat memahami konsep-konsep dan prinsip-prinsip mengenai kesetimbangan benda
tegar beserta konsep, prinsip dan metode menentukan titik berat suatu benda
menggunakan metode garis berat benda;
2. Dapat membuktikan bahwa titik berat suatu sistem benda sama dengan titik berat
gabungan dari benda-benda yang merupakan penyusun dari benda tersebut;
3. Dapat mengaktualisasikan diri dalam suatu kegiatan akademik yang menyangkut
kajian ilmiah, sehingga dapat meningkatkan taraf pengetahuan dan penerapan Sains;
4. Dengan pemahaman yang mendalam tentang konsep dan prinsip ilmu Fisika,
terutama dalam bab kesetimbangan benda tegar dan titik berat benda, maka siswa
dapat memiliki modal dasar yang krusial bagi mereka yang hendak meneruskan
jenjang pendidikannya di tingkat universitas pada jurusan arsitektur maupun teknik
sipil.

BAB II
LANDASAN TEORI
A. ANALISIS VEKTOR
I. Besaran Vektor dan Besaran Skalar
Besaran vektor adalah besaran yang mempunyai besar dan arah. Contoh dari
besaran vektor adalah perpindahan, kecepatan, dan percepatan. Sementara besaran
skalar adalah besaran yang hanya mempunyai besar,tetapi tidak mempunyai arah.
Contoh dari besaran skalar adalah massa, energi, dan volume.
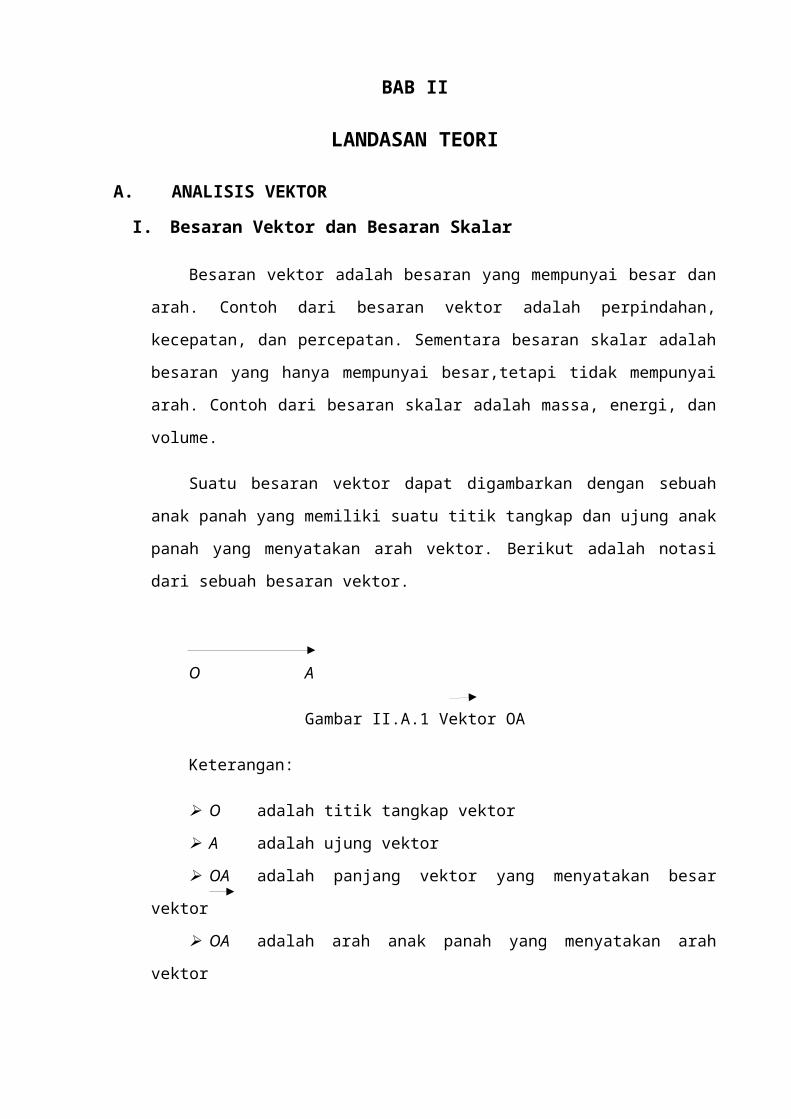
Suatu besaran vektor dapat digambarkan dengan sebuah anak panah yang
memiliki suatu titik tangkap dan ujung anak panah yang menyatakan arah vektor.
Berikut adalah notasi dari sebuah besaran vektor.
O A
Gambar II.A.1 Vektor OA
Keterangan:
O adalah titik tangkap vektor
A adalah ujung vektor
OA adalah panjang vektor yang menyatakan besar vektor
OA adalah arah anak panah yang menyatakan arah vektor
Suatu vektor dapat dituliskan dengan satu huruf, berupa huruf kecil atau huruf
besar, misalnya a atau A . Vektor dapat pula dituliskan dengan dua huruf besar,
misalnya AB.
II.Resultan Dua Buah Vektor
Penjumlahan (resultan) dua buah vektor dapat dilukiskan dengan tiga
metode,yaitu;
1. Metode Jajaran Genjang
2. Metode Segibanyak (Poligon)
3. Metode Analitis
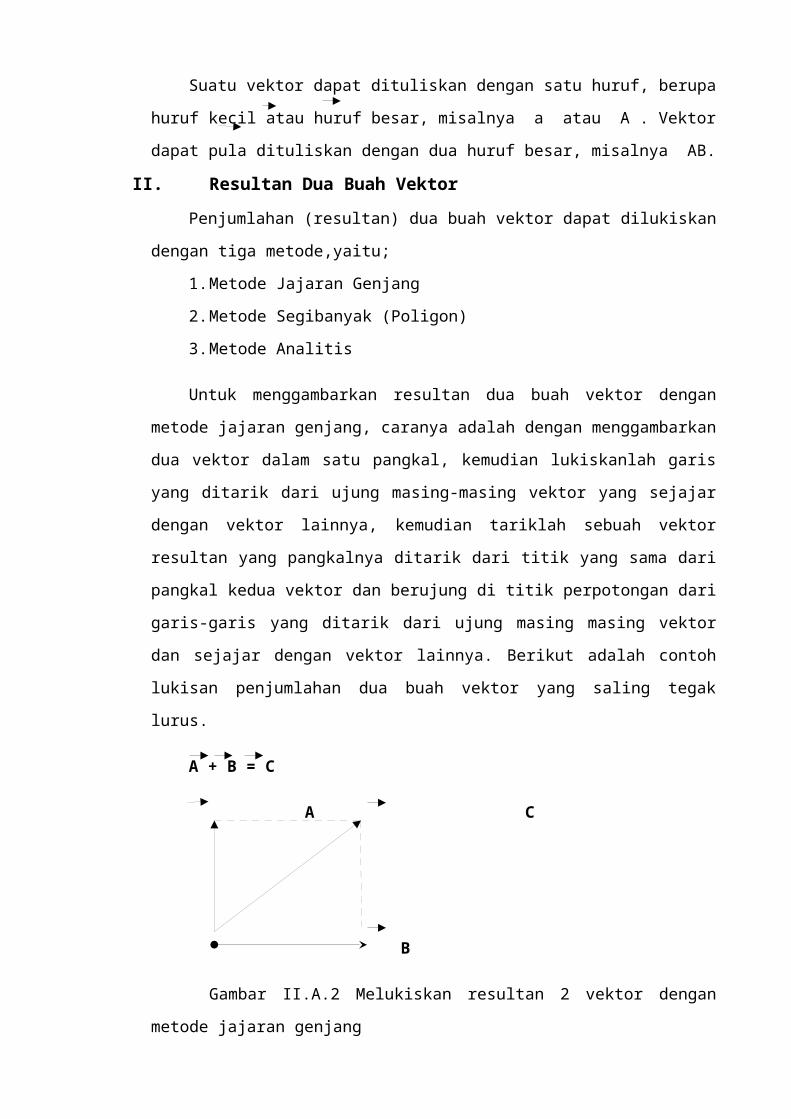
Untuk menggambarkan resultan dua buah vektor dengan metode jajaran genjang,
caranya adalah dengan menggambarkan dua vektor dalam satu pangkal, kemudian
lukiskanlah garis yang ditarik dari ujung masing-masing vektor yang sejajar dengan
vektor lainnya, kemudian tariklah sebuah vektor resultan yang pangkalnya ditarik dari
titik yang sama dari pangkal kedua vektor dan berujung di titik perpotongan dari garis-
garis yang ditarik dari ujung masing masing vektor dan sejajar dengan vektor lainnya.
Berikut adalah contoh lukisan penjumlahan dua buah vektor yang saling tegak lurus.
A + B = C
A C
B
Gambar II.A.2 Melukiskan resultan 2 vektor dengan metode jajaran genjang
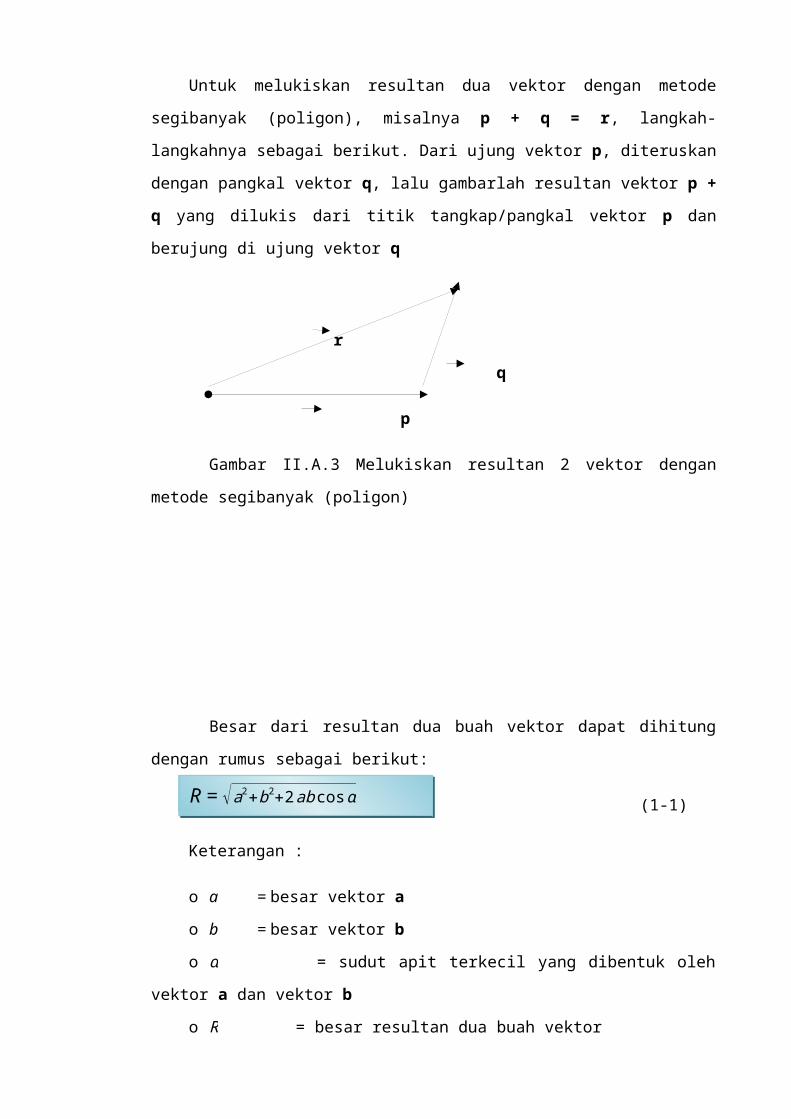
Untuk melukiskan resultan dua vektor dengan metode segibanyak (poligon),
misalnya p + q = r, langkah-langkahnya sebagai berikut. Dari ujung vektor p,
diteruskan dengan pangkal vektor q, lalu gambarlah resultan vektor p + q yang dilukis
dari titik tangkap/pangkal vektor p dan berujung di ujung vektor q
r
q
p
Gambar II.A.3 Melukiskan resultan 2 vektor dengan metode segibanyak
(poligon)

Besar dari resultan dua buah vektor dapat dihitung dengan rumus sebagai
berikut:
(1-1)
Keterangan :
o a = besar vektor a
o b = besar vektor b
o α = sudut apit terkecil yang dibentuk oleh vektor a dan vektor b
o R = besar resultan dua buah vektor
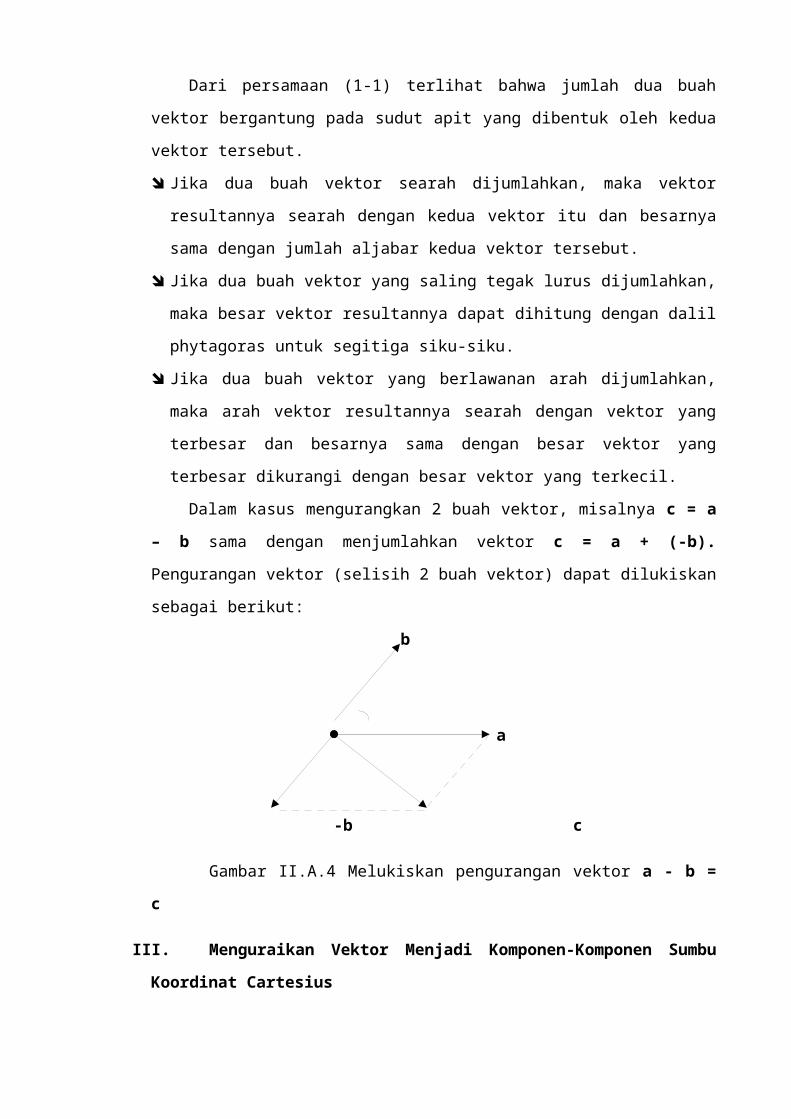
Dari persamaan (1-1) terlihat bahwa jumlah dua buah vektor bergantung pada
sudut apit yang dibentuk oleh kedua vektor tersebut.
Jika dua buah vektor searah dijumlahkan, maka vektor resultannya searah dengan
kedua vektor itu dan besarnya sama dengan jumlah aljabar kedua vektor tersebut.
Jika dua buah vektor yang saling tegak lurus dijumlahkan, maka besar vektor
resultannya dapat dihitung dengan dalil phytagoras untuk segitiga siku-siku.
Jika dua buah vektor yang berlawanan arah dijumlahkan, maka arah vektor
resultannya searah dengan vektor yang terbesar dan besarnya sama dengan besar
vektor yang terbesar dikurangi dengan besar vektor yang terkecil.
Dalam kasus mengurangkan 2 buah vektor, misalnya c = a – b sama dengan
menjumlahkan vektor c = a + (-b). Pengurangan vektor (selisih 2 buah vektor) dapat
dilukiskan sebagai berikut:
b
a
-b c
Gambar II.A.4 Melukiskan pengurangan vektor a - b = c
III. Menguraikan Vektor Menjadi Komponen-Komponen Sumbu Koordinat
Cartesius
Setiap vektor dapat diuraikan menjadi komponen-komponennya pada sumbu-
sumbu dalam koordinat Cartesius. Misalkan vektor V diuraikan, maka komponen
R = √a2+b2+2ab cosα
vektor V pada sumbu X ditulis Vx, sementara komponen vektor V pada sumbu Y
ditulis Vy. Jika sudut yang dibentuk oleh vektor V terhadap sumbu X positif adalah α,
maka berdasarkan rumus perbandingan trigonometri pada segitiga siku siku AOB
diperoleh:
cos α = V xV
(1-4 a)
sin α = V yV
(1-4 b)
Bila besar komponen Vx dan Vx diketahui maka besar sudut yang
dibentuk oleh vektor V terhadap sumbu x-positif dapat dicari sebaga berikut:
(1-5)
IV. Menjumlahkan Vektor Secara Analitis
Menjumlahkan secara analitis adalah menjumlahkan komponen-komponen vektor
pada sumbu x dan sumbu y. Langkah-langkah menjumlahkan vektor secara analitis
adalah sebagai berikut:
1. Uraikan setiap vektor menjadi komponen-komponennya padda sumbu x dan sumbu
y, kemudian hitung besar komponen-komponen tersebut dengan persamaan:
2. Jumlahkan komponen-komponen vektor pada sumbu x dan sumbu y
Rx = ∑Vx
= V1x + V2x + V3x + ....... + Vnx
Ry = ∑Vy
Vx = V cos α
Vy = V sin α
tan α= V yV x
Vx = V cos α Vy = V sin α
Ry = V1y + V2y + V3y + ....... + Vny
3. Hitung besar dan arah resultan vektor dengan dalil phytagoras
V.Perkalian Vektor
Terdapat 2 (dua) macam perkalian vektor, yaitu:
1. Perkalian Skalar
2. Perkalian Vektor
1. Perkalian Skalar
Perkalian skalar antara dua vektor a dan b, yang dituliskan sebagai a . b
(dibaca “ a dot b”), menghasilkan sebuah skalar yang didapat dengan mengalikan
besar a dan besar b serta cosinus sudut apit terkecil antara kedua vektor.
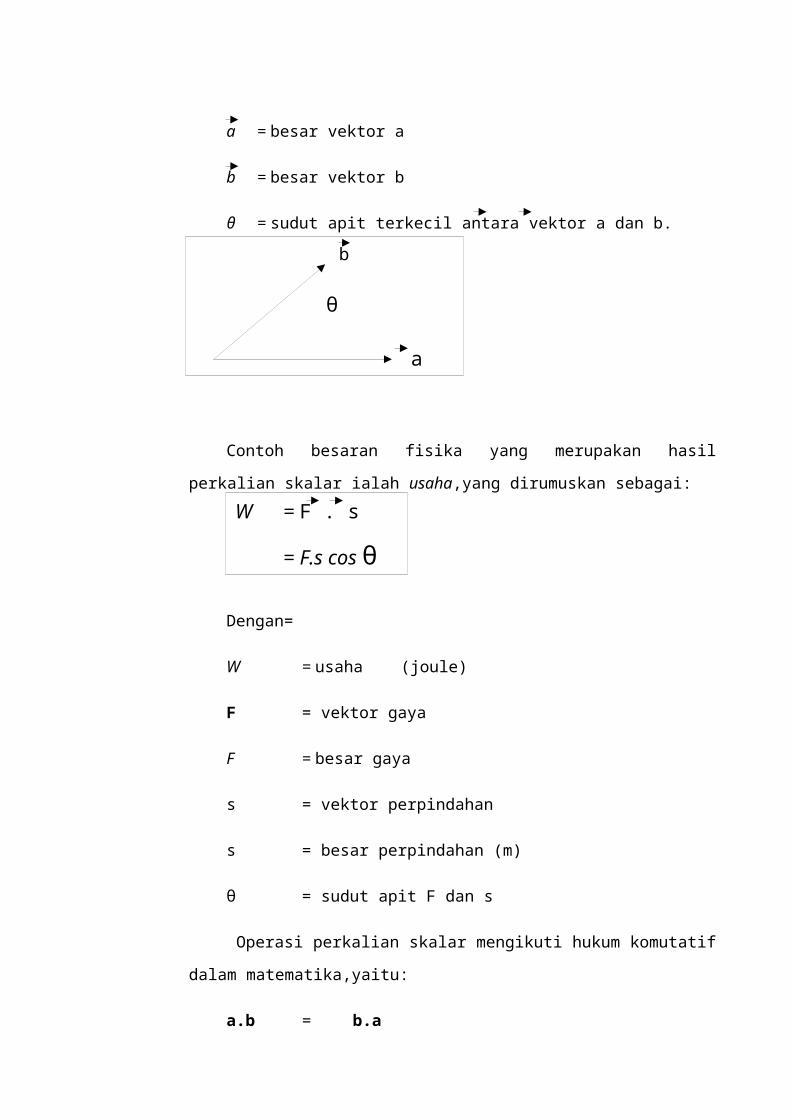
a = besar vektor a
b = besar vektor b
θ = sudut apit terkecil antara vektor a dan b.
Contoh besaran fisika yang merupakan hasil perkalian skalar ialah
usaha,yang dirumuskan sebagai:
Dengan=
W = usaha (joule)
R=√Rx2+Ry 2
tan α = RyRx
a.b = a.b cos θ
b
θ
a
W = F . s
= F.s cos θ
F = vektor gaya
F = besar gaya
s = vektor perpindahan
s = besar perpindahan (m)
θ = sudut apit F dan s
Operasi perkalian skalar mengikuti hukum komutatif dalam
matematika,yaitu:
a.b = b.a
2. Perkalian Vektor
Perkalian vektor antara dua vektor a dan b, yang ditulis sebagai a × b
(dibaca a cross b), menghasilkan sebuah vektor yang besarnya dirumuskan oleh:
Dengan:
a = besar vektor a
b = besar vektor b
θ = sudut apit terkecil antara antara kedua vektor a dan b.
Vektor | a × b∨¿ tegaklurus dengan bidang yang yang dibentuk oleh vektor
a dan vektor b.
Perkalian vektor tidak bersifat komutatif, tetapi anti komutatif.
Contoh besaran fisika yang merupakan hasil perkalian vektor adalah luas,
momen gaya, dan gaya lorentz.
Luas jajaran genjang contohnya, didefinisikan sebagai:
| A | = A = p.l sin θ
Dengan p dan l adalah vektor-vektor yang membentuk jajaran genjang.
|a× b∨¿ a .b sin θ
Y
X
Z
j
k
i
Ay
AxAz
Keterangan
Vektor A
Sumbu-sumbu koordinat Cartesius
Komponen-komponen vektor A pada sumbu koordinat
Vektor-vektor satuan pada sumbu koordinat
A
VI. Vektor Satuan
Suatu vektor yang terletak bidang 2 dimensi dapat diuraikan menjadi komponen-
komponen vektor dalam sumbu X dan sumbu Y. Sementara vektor yang yang terletak
dalam ruang, maka vektor tersebut juga dapat diuraikan menjadi komponen-komponen
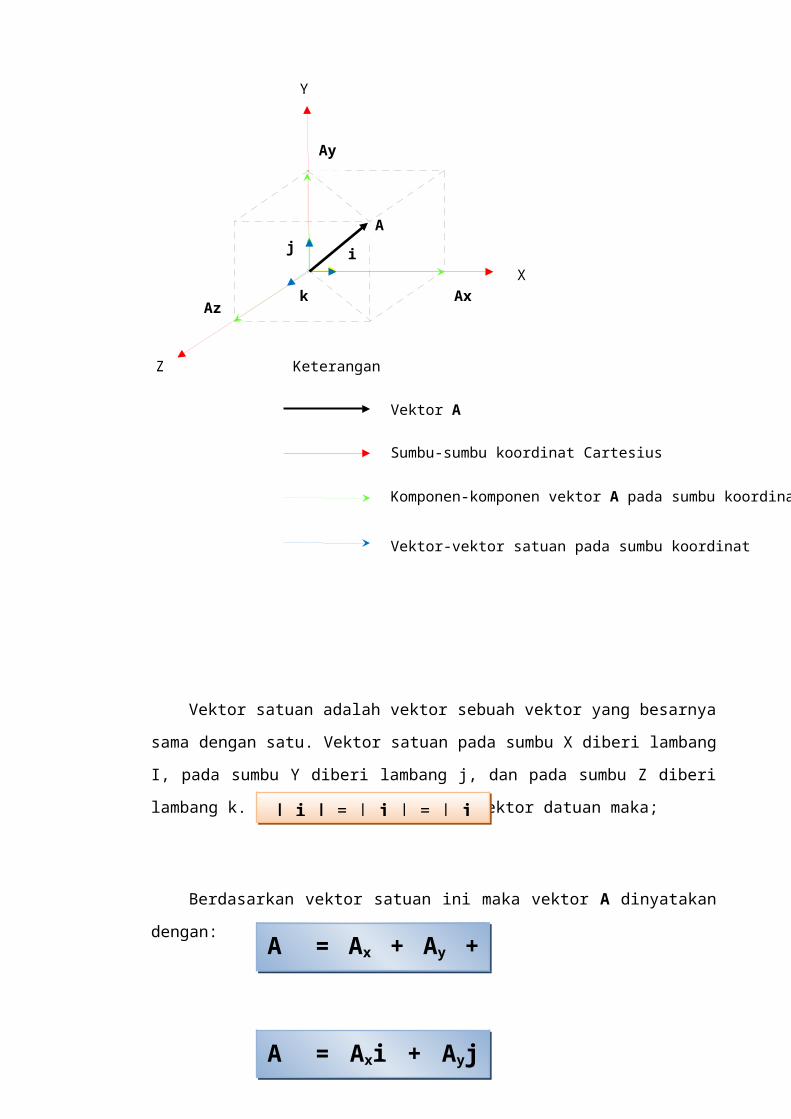
pembentukya pada sumbu X, sumbu Y, dan sumbu Z. Gambar II.E.1 menunjukkan
vektor A yang terletak dalam ruang diuraikan menjadi komponen-komponen
pembentuknya, yaitu Ax, Ay, dan Az. Dengan demikian vektor A dapat ditulis sebagai
berikut:
Untuk memudahkan analisis maka ditetapkanlah vektor-vektor satuan pada sumbu
X, sumbu Y, dan sumbu Z. Lihat gambar II.E.1
A = Ax + Ay + Az

Vektor satuan adalah vektor sebuah vektor yang besarnya sama dengan satu.
Vektor satuan pada sumbu X diberi lambang I, pada sumbu Y diberi lambang j, dan
pada sumbu Z diberi lambang k. Sesuai dengan definisi vektor datuan maka;
Berdasarkan vektor satuan ini maka vektor A dinyatakan dengan:
Pada gambar II.E.1, vektor A merupakan diagonal ruang bangun berbentuk balok
dengan rusuk-rusuk Ax, Ay, dan Az, sehingga berlaku:
1. Penjumlahan Vektor Satuan
Penjumlahan vektor satuan identik dengan penjumlahan suku-suku aljabar.
2. Perkalian Skalar Dua Buah Vektor Satuan
Perkalian Skalar Vektor Satuan yang Sejenis
i.i = | i |.| i | cos 0o
= (1) . (1)(1)
i.i = 1
jadi, kesimpulan untuk perkalian vektor satuan yang sejenis adalah:
| i | = | j | = | j | = 1
A = Ax + Ay + Az
A = Axi + Ayj + Azk
A =√A x2+A y
2+A z2
ai + bj + ck + di + ej + fk = (a+d)i + (b+e)j + (c+f)k
i.i = j.j = k.k = 1

Perkalian skalar Vektor Satuan yang Tidak Sejenis
i.j = | i |.| j | cos 90o
= (1) . (1)(0)
i.j = 0
Jadi, perkalian skalar vektor-vektor satuan yang tidak sejenis rumusnya adalah
Perkalian vektor-vektor satuan sama dengan satu jika vektor-vektor satuan
tersebut sejenis, dan sama dengan nol jika keduanya tidak sejenis.
Rumus perkalian skalar dua buah vektor
Jika vektor A dan B dinyatakan dengan vektor-vektor satuan sebagai berikut:
A = Axi + Ayj + Azk dan B = Bxi + Byj + Bzk
Maka dengan menggunakan rumus perkalian skalar dua buah vektor satuan,
diperoleh:
A.B = (Ax i + Ay j + Az k) . (Bx I + By j + Bz k)
3. Perkalian Vektor Dua Buah Vektor Satuan
Perkalian Vektor Dua Buah Vektor Satuan Yang Sejenis:
| i x i | = | i |.| i | sin 0o
= (1) . (1)(0)
| i x i | = 0
i.i = 0
Jadi, perkalian vektor dua vektor satuan yang sejenis:
i.j = j.k = i.k = 0
A.B = Ax Bx + Ay By + Az Bz
i x i = j x j = k x k = 0
+
-
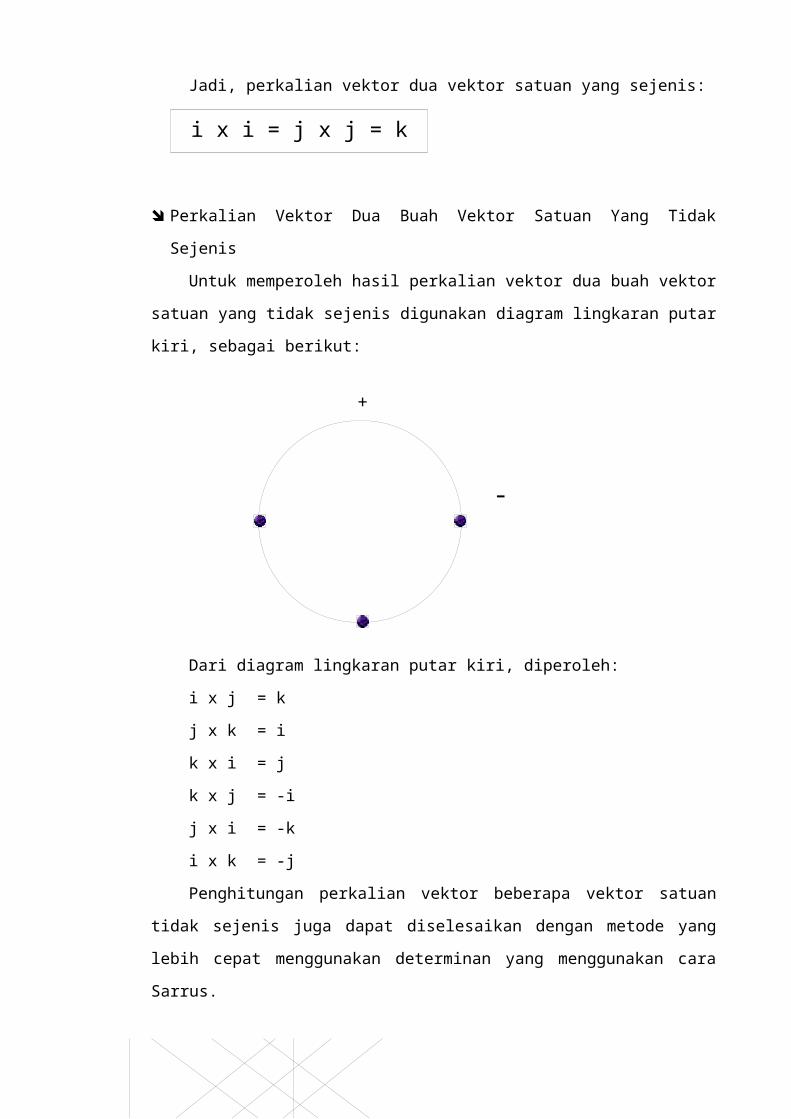
Perkalian Vektor Dua Buah Vektor Satuan Yang Tidak Sejenis
Untuk memperoleh hasil perkalian vektor dua buah vektor satuan yang tidak
sejenis digunakan diagram lingkaran putar kiri, sebagai berikut:
Dari diagram lingkaran putar kiri, diperoleh:
i x j = k
j x k = i
k x i = j
k x j = -i
j x i = -k
i x k = -j
Penghitungan perkalian vektor beberapa vektor satuan tidak sejenis juga dapat
diselesaikan dengan metode yang lebih cepat menggunakan determinan yang
menggunakan cara Sarrus.
a11 a12 a13 a11 a12 = a11 a22 a33 + a12 a 23 a31 +
a21 a22 a23 a21 a22 a13 a21 a32 – a13 a 22 a31 -
a31 a32 a33 a31 a32 a11 a23 a32 – a12 a21 a33
Contoh E.2 1
Tentukan hasil perkalian vektor dari vektor-vektor:
A = 2i + 3j – k dan B = -i + j + 2k

i j k vektor-vektor satuan i, j dan k
a x b = 2 3 -1 koefisien-koefisien vektor a
-1 1 2 koefisien-koefisien vektor b
Sehingga:
i j k i j = i (3)(2) + j (-1)(-1) + k (2)(1) -
a x b = 2 3 -1 2 3 k (3)(-1) – i(-1)(1) – j(2)(2)
-1 1 2 -1 1 = 6i + j + 2k + 3k + i + 4j
=7i - 3j + 5k
B. KINEMATIKA ROTASI
Gerak rotasi merupakan gerak benda yang berputar terhadap sebuah sumbu putar
( sumbu rotasi ). Contoh dari gerak rotasi dalam kegiatan sehari hari misalnya gerak
roda mobil yang berputar, gerakan pintu yang berputar pada engselnya, dan gerak rotasi
pada sumbunya.
ry = r sin
x=r cos
Dalam melukiskan gerak rotasi, besaran-besaran yang digunakan meliputi posisi
sudut, kecepatan sudut, dan percepatan sudut.
I. Posisi Sudut
Posisi suatu benda dapat dinyatakan dalam koordinat cartesius (x,y) ataupun
dalam koordinat polar. Pada koordinat polar, posisi benda dinyatakan dalam r dan .
disebut posisi sudut yang diukur terhadap sumbu x-positif, berputar berlawanan arah
dengan arah putaran jarum jam.
Hubungan antara (x,y) dan (r,) adalah:
X = r cos
y = r sin
r = √ x2+ y2
= tan−1( yx )
Menyatakan Posisi Sudut dalam Derajat Radian
Dalam penghitungan kinematika rotasi, posisi sudut sering juga dinyatakan dalam
radian atau disingkat rad. Satuan radian didefinisikan sebagai perbandingan antara
panjang busur suatu juring lingkaran dengan jari-jari lingkaran.
= 1 radian
1 radian s = r
s = r
=
+
A
t t + t
t
B
O
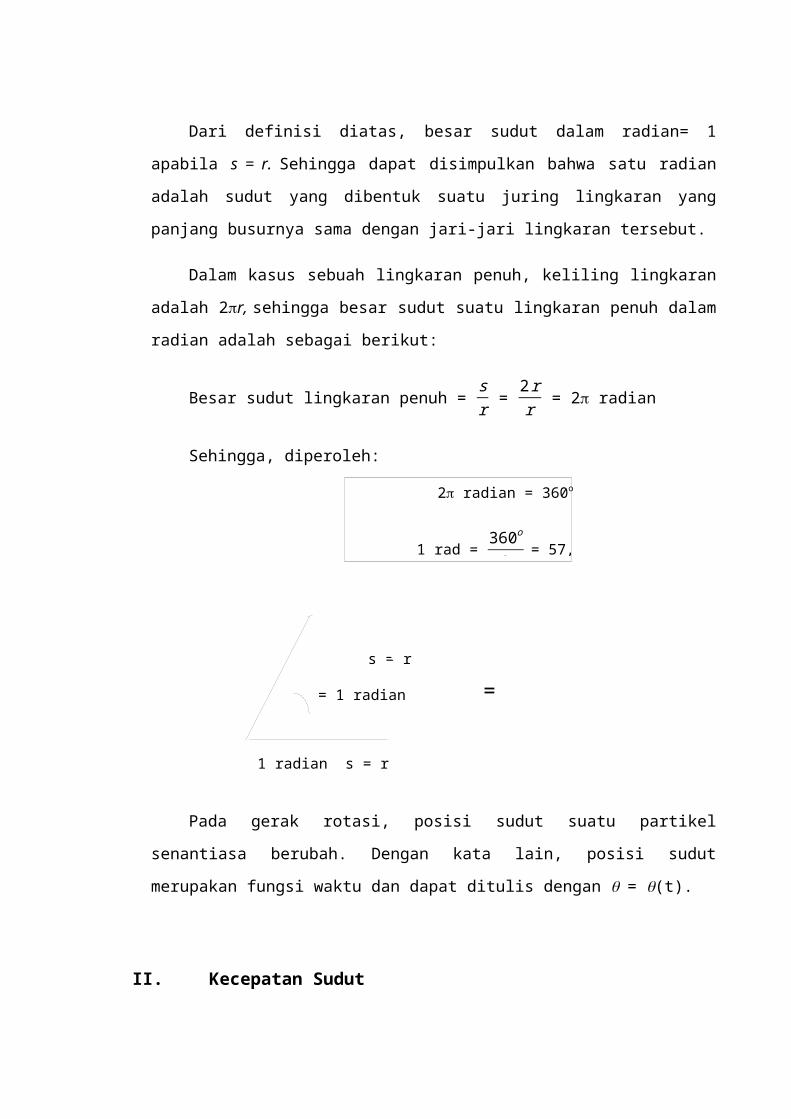
Dari definisi diatas, besar sudut
dalam radian= 1 apabila s = r.
Sehingga dapat disimpulkan bahwa
satu radian adalah sudut yang dibentuk
suatu juring lingkaran yang panjang busurnya sama dengan jari-jari lingkaran tersebut.
Dalam kasus sebuah lingkaran penuh, keliling lingkaran adalah 2r, sehingga
besar sudut suatu lingkaran penuh dalam radian adalah sebagai berikut:
Besar sudut lingkaran penuh = sr
= 2rr
= 2 radian
Sehingga, diperoleh:
Pada gerak rotasi, posisi sudut suatu partikel senantiasa berubah. Dengan kata
lain, posisi sudut merupakan fungsi waktu dan dapat ditulis dengan = (t).
II.Kecepatan Sudut
Sudut dalam radian = panjang busur lingkaran
jari− jari lingkaran =
sr
2 radian = 360o
1 rad = 360o
2 = 57,296o

O
A
garis singgung
Gambar diatas melukiskan grafik posisi sudut suatu partikel sebagai fungsi
waktu. Misalkan pada waktu t partikel berada di A (posisi sudutnya ) dan setelah t + t
posisi sudutnya adalah + (titik B).
Kecepatan sudut rata-rata partikel didefinisikan sebagai perubahan posisi sudut
dibagi dengan selang waktu selama perubahan posisi sudut tersebut.
¿❑t
Kecepatan sudut sesaat (selanjutnya disebut sebagai kecepatan sudut) merupakan
kecepatan sudut rata-rata ketika t sangat kecil. Arah kecepatan sudut menyinggung
kurva (t). Lambang kecepatan sudut adalah .
ω= lim∆t →0
∆ θ∆ t
=dθdt
Satuan kecepatan sudut adalah radian/sekon atau disingkat rad/s. Suatu gerak
rotasi dengan kecepatan sudut konstan dinamakan gerak melingkar beraturan.
Pada gerak melingkar beraturan, frekuensi putaran didefinisikan sebagai
banyaknya putaran setiap detik. Karena 1 putaran sama 2 radian, maka frekuensi sama
dengan kecepatan sudut dibagi dengan 2:
f¿ω
2 π
Perlu ditekankan bahwa : ω=dθdt
(kecepatan sudut) merupakan fungsi waktu, berbeda dengan
besaran yang lain seperti:
ω=√ km
atau ω=√ gl
Pada gerak melingkar beraturan keduanya sama.
Satuan dari frekuensi adalah putaran per detik atau disingkat putaran/s. Seringkali satuan
frekuensi ditulis sebagai s-1 atau Hz (Hertz). Frekuensi juga dapat dinyatakan dalam rpm
(rotation per minute) atau putaran per menit.
1 rpm = 1
60 putaran/s =
160
Sementara itu, periode,T, merupakan waktu yang diperlukan untuk melakukan 1 kali putaran.
Hubungan antara frekuensi dan periode adalah:
f= 1T
III. Menentukan posisi sudut dari kecepatan sudut
Posisi sudut suatu benda dapat ditentukan dengan mengintegralkan kecepatan
sudut. Jika posisi sudut awal partikel adalah θ0, maka posisi sudut pada waktu t adalah
θt dan dapat dihitung sebagai berikut (anggap t0 = 0)
B
t + t
A
ω=dθdt
dθ=ω dt
∫θ0
θt
dθ = ∫0
t
ωdt
Jika konstan, maka gerakan benda adalah gerak melingkar beraturan.
θt=θ0+ωt
IV. Percepatan sudut
Gambar diatas merupakan grafik kecepatan sudut suatu partikel sebagai fungsi
waktu. Misalkan pada waktu t, partikel berada di A (kecepatan sudutnya ω) dan setelah t
+ ∆ t partikel berada di B (kecepatan sudutnya ω+∆ ω).
Percepatan sudut rata-rata didefinisikan sebagai perubahan kecepatan sudut
dibagi dengan selang waktu selama perubahan kecepatan sudut tersebut.
α=∆ ω∆ t
θt=θ0+∫0
t
ωdt

Percepatan sudut sesaat (disebut percepatan sudut) sama dengan percepatan sudut
rata-rata ketika t sangat kecil. Arah percepatan sudut sama dengan arah gradien garis
singgung kurva ω ( t ) .Percepatan sudut diberi lambang α .
Satuan dari percepatan sudut adalah radian/detik2 atau disingkat rad/s2.
V.Menentukan kecepatan sudut dari percepatan sudut
Kecepatan sudut dapat dihitung dengan mengintegralkan percepatan sudut. Jika
kecepatan sudut awal partikel adalah α 0 maka kecepatan sudut pada waktu t adalah α t
dan dapat dihitung sebagai berikut (anggap t0 = 0).
α=dωdt
dω=α dt
∫ω0
ω1
dω=∫0
t
α dt
ωt−ω0=∫0
t
α dt
Jika α konstan, maka
Posisi sudut untuk α konstan,
θt=θ0+∫0
t
ωdt
α= lim∆ t →0
∆ ω∆ t
¿ dωdt
ωt=ω0+∫0
t
α dt
ωt=ω0+αt

SO
R
θt=θ0+∫0
t
(ω0+αt )dt
Gerakan dengan α konstan dinamakan gerak melingkar berubah beraturan.
VI. Besaran-besaran Tangensial
Gambar disamping melukiskan sebuah titik pada tepi roda yang berputar mengelilingi
sumbu putar O. Jika jarak titik tersebut ke pusat putaran adalah R, maka panjang lintasan titik
setelah menempuh sudut θ adalah:
s = Rθ
Karena jari-jari lintasan R adalah konstan, maka laju
perubahan s sepenuhnya disebabkan oleh laju
perubahan θ .
∆ s∆ t
=R∆ θθt
Dengan mengambil limit ∆ t mendekati nol, maka persamaan diatas dapat
dituliskan sebagai:
lim∆t →0
∆ s∆ t
=R lim∆ t →0
∆θ∆ t
dsdt
=Rdθdt
v=dsdt
merupakan kecepatan translasi atau kecepatan tangensial. Arah kecepatan
ini searah dengan gerakan titik.
θt=θ0+ω0 t+ 12
α t2
v=Rω

Jika putaran roda dipercepat, maka kecepatan tangensial v aka semakin besar dan
laju perubahan kecepatan sepenuhnya disebabkan oleh laju perubahan kecepatan sudut.
dvdt
=RΔωΔt
Dengan mengambil limit ∆ t sangat kecil, rumus diatas dapat dituliskan sebagai:
lim∆t →0
Δ vΔt
=R lim∆t → 0
ΔωΔt
dvdt
=Rdωdt
a=dvdt
merupakan kecepatan tangensial. Arah percepatan ini searah dengan arah
gerakan titik. Selain percepatan tangensial, suatu titik yang bergerak melingkar akan
mengalami percepatan sentripetal (perceatan normal atau percepatan radial) yang
arahnya menuju ke pusat lingkaran.
Besar percepatan tangensial adalah:
Kesimpulan:
Hubungan antara besaran- besaran tangensial dengan besaran- besaran sudutnya
adalah=
C. Dinamika Rotasi Benda Tegar
a=Rα
a= v2
r= ω2 R
s=Rθ
v=Rω
a=Rα
Benda tegar didefinsikan sebagai benda yang tidak berubah bentuknya jika pada
benda itu bekerja sejumlah gaya. Misalnya baja, beton, besi, batu dan sebagainya.
Dinamika adalah ilmu yang mempelajari gerak benda dengan memperhatikan
penyebabnya. Sementara gerak rotasi atau gerak melingkar adalah gerak suatu benda
yang lintasannya berbentuk lingkaran. Maka dalam dinamika rotasi yang dipelajari
adalah gerak rotasi berkaitan dengan penyebabnya.
I. Torsi (Momen Gaya)
Sebuah gaya dapat menimbulkan gerak rotasi apabila garis kerja gaya tidak
melalui pusat rotasi. Gaya yang menyebabkan gerak rotasi menghasilkan torsi atau
disebut juga dengan momen gaya.
Torsi atau momen gaya adalah penyebab dari benda berotasi yang berperan
layaknya gaya pada gerak lurus. Momen gaya disebut juga torsi atau torka ataupun
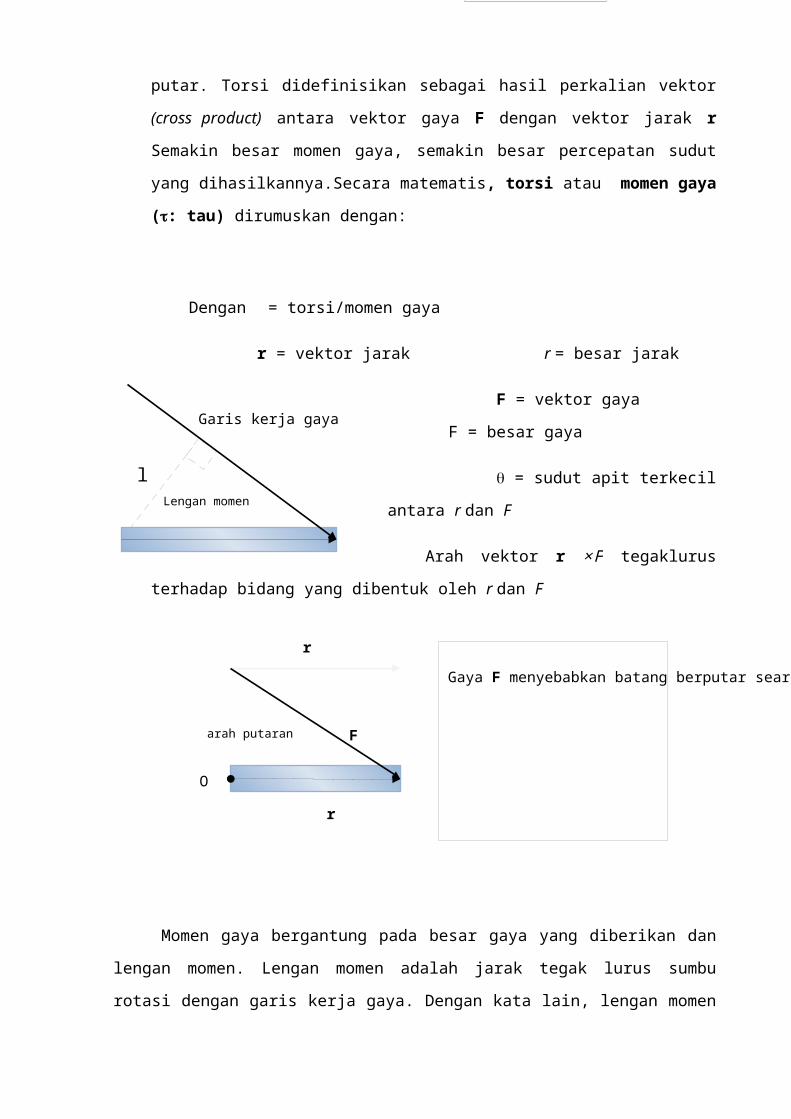
dobrakan putar. Torsi didefinisikan sebagai hasil perkalian vektor (cross product) antara
vektor gaya F dengan vektor jarak r Semakin besar momen gaya, semakin besar
percepatan sudut yang dihasilkannya.Secara matematis, torsi atau momen gaya (:
tau) dirumuskan dengan:
Dengan = torsi/momen gaya
r = vektor jarak r = besar jarak
F = vektor gaya F = besar gaya
= sudut apit terkecil antara r dan F
Arah vektor r × F tegaklurus terhadap bidang yang dibentuk oleh r dan F
τ=r × F τ=rF sin θ

r
arah putaran
O
r
F
Gaya F menyebabkan batang berputar searah putaran jarum jam dengan titik O sebagai poros putaran. Arah torsi yang dihasilkan menuju bidang sesuai aturan perkalian vektor
lLengan momen
Garis kerja gaya
Momen gaya bergantung pada besar gaya yang
diberikan dan lengan momen. Lengan momen adalah
jarak tegak lurus sumbu rotasi dengan garis kerja gaya.
Dengan kata lain, lengan momen merupakan jari-jari
rotasi. Pada gambar dibawah, lengan momen ditarik dari
sumbu putar (O) tegak lurus garis kerja gaya.
Dengan mengikutsertakan lengan momen, persamaan
momen gaya dapat dinyatakan dengan:
τ=(r sin θ ) F atau τ=Fl
Torsi merupakan besaran vektor, maka ketentuan mengenai harga torsi sesuai arahnya adalah
sebagai berikut:
τ>0(berharga positif ) apabila menyebabkan putaran searah dengan putaran jarum jam;
τ ¿0 (berharga negative) apabila menyebabkan putaran berlawanan arah dengan putaran
jarum jam.
II.Momen Inersia
Inersia adalah kecenderungan benda untuk mempertahankan posisinya. Benda
yang sukar untuk digerakkan ketika diam dan benda yang sukar dihentikan ketika ia
bergerak dikatakan memiliki inersia yang besar. Massa merupakan ukuran dari inersia.
Pada kasus gerak rotasi, besaran yang menentukan inersia benda adalah inersia rotasi.
Inersia rotasi yaitu kecenderungan benda untuk mempertahankan keadaan rotasinya.
Jika benda dalam keadaan diam, maka benda tersebut cenderung tetap diam. Jika benda
dalam keadaan berotasi, benda tersebut cenderung untu terus berotasi.
Ukuran yang menyatakan besarnya kecenderungan benda untuk mempertahankan
keadaan rotasinya adalah momen inersia.Momen inersia bergantung pada massa benda,
bentuk benda, dan cara penyebaran massa pada benda tersebut. Benda yang bermassa
sama namun bentuk bangunnya berbeda memiliki momen inersia yang berbeda.
Untuk merumuskan momen inersia secara matematis, pada kasus momen inersia
benda titik yang berputar;momen inersianya didefinisikan sebagai hasil perkalian antara
massa partikel,m dengan kuadrat jarak partikel tersebut dari sumbu putarnya.
Untuk momen inersia sebuah sistem yang memiliki banyak partikel, momen
inersia dari sistem partikel tersebut adalah jumlah total momen inersia dari tiap-tiap
partikel.
I=m r2
I=∑i
n
mi ri2
l
r
III. Momen Inersia Benda Tegar
Momen inersia dari benda tegar (benda yang tidak berubah bentuk walau
mendapat gaya atau momen gaya) adalh jumlah dari momen inersia setiap partikel
dalam partikel benda tersebut. Berikut adalah tabel momen inersia dari benda-benda
homogen.
NO BENTUK BENDA TEGAR KETERANGAN MOMEN INERSIA
1
Batang silinder tipis.
Poros melalui pusat
titik tengah batang
112
M l2
Batang silinder tipis.
Poros melalui salah
satu ujung batang
13
M l2
Cincin.
Poros melalui sumbu
simetri
M R2
Cincin.
Poros melalui
diameter.
12
MR2
l

r
r
r
Silinder pejal.
Poros melalui pusat
silinder.
12
MR2
Silinder pejal.
Poros melalui tepi
silinder.
32
MR2
Kulit bola.
Poros melalui pusat
kulit bola.
23
MR2
Bola pejal.
Poros melalui pusat
bola.
25
MR2
Bola pejal.
Poros melalui tepi
bola.
75
MR2
Or
L
z
p y
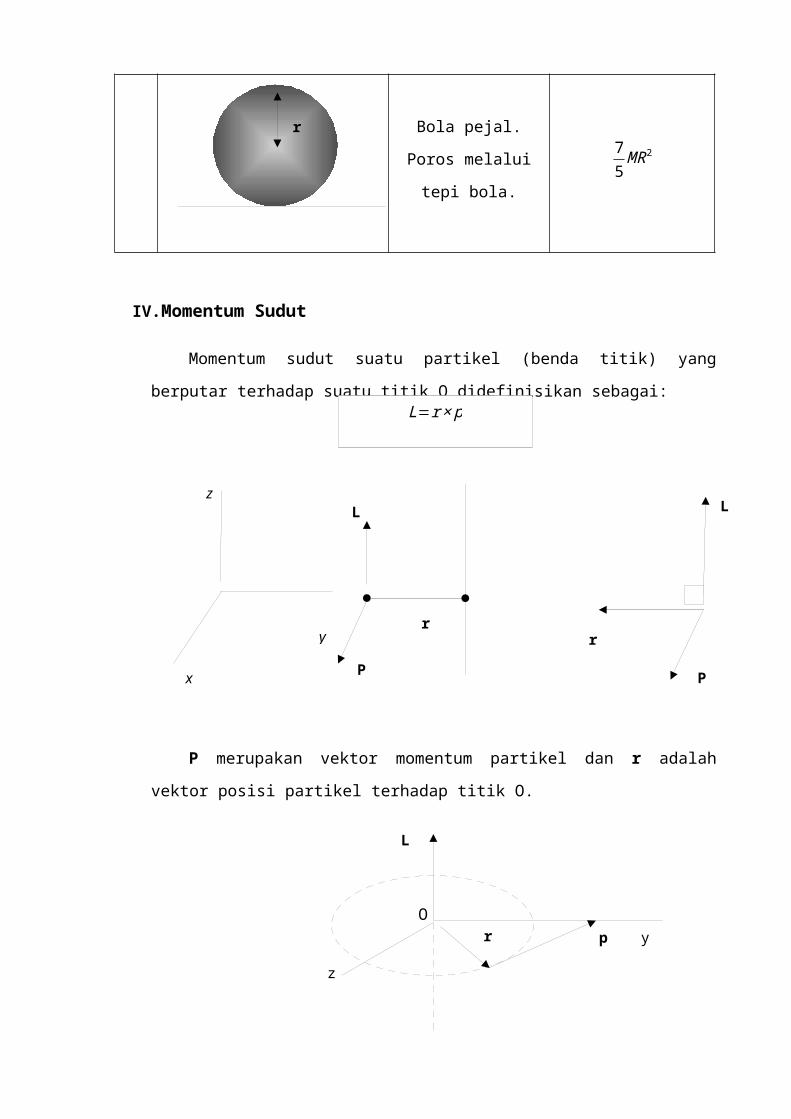
IV. Momentum Sudut
Momentum sudut suatu partikel (benda titik) yang berputar terhadap suatu titik O
didefinisikan sebagai:
P merupakan vektor momentum partikel dan r adalah vektor posisi partikel
terhadap titik O.
Pada gambar diatas, sebuah partikel berputar mengelilingi sumbu putar yang
melalui O. Momentum sudut terhadap titik O adalah:
L=r × p=|r||p|sin θ k
¿ r mv sin (90o )k
¿ rm (ωr )k
¿m r2ω k
¿ I ω
L=r × p
L
P
r
L
r
P
z
x
y
F
BA
r
Besar dari momentum sudut dapat dituliskan:
k merupakan vektor satuan arah sumbu z positif dan ω merupakan vektor
kecepatan sudut.Arah dari vektor kecepatan sudut:
Jika partikel bergerak melingkar berlawanan arah dengan putaran jarum jam
dalam bidang xy, maka arah vektor kecepatan sudutnya kea rah sumbu z positif;
Jika partikel bergerak melingkar searah dengan putaran jarum jam, maka
vektor kecepatan sudutnya kea rah sumbu z negatif.
Rumus L=I ω berlaku juga untuk benda tegar.
V.Hubungan antara Torsi, Momen Inersia, dan Percepatan Sudut
Momen gaya () menyebabkan gerak rotasi pada benda, sehingga timbul
percepatan sudut ()
Pada gambar disamping, benda kecil bermassa m
dihubungkan dengan tongkat ringan yang dapat berputar
bebas pada ujung A. Gaya F bekerja pada ujung B. Gaya
tersebut menimbulkan momen gaya sebesar τ=rF yang
menyebabkan benda berotasi.
Besar percepatan tangensial dari partikel tersebut adalah a = αr .
Berdasarkan hukum II Newton, diperoleh F = maT, maka:
τ=rF
=rm (αr )
=m r2 ( α )
Karena momen inersia benda adalah I = m r2, maka:
Persamaan diatas merupakan hukum II Newton pada gerak melingkar.
L = Iω
τ=Iα

VI. Energi Kinetik Rotasi
Dalam gerak translasi, energi kinetik dirumuskan dengan
EK=12
mv2
Dalam gerak rotasi, v= ωr , sehingga:
EK=12
m (ωr )2
EK=12
(mr2 )ω2
Dengan I adalah momen inersia dan merupakan kecepatan sudut.
Pada benda yang melakukan gerak translasi sekaligus gerak rotasi, hukum
kekekalan energi mekanik dapat dirumuskan dengan:
EKtranslasi1+EKrotasi1+¿E P1=EKtranslasi 2+EKrotasi 2+¿EP 2¿¿
Atau,
12
m v12+1
2Iω1
2+mg h1=12
m v22+ 1
2Iω2
2+mg h2
EK=12
I ω2

VII. Kekekalan Momentum Sudut
Torsi merupakan turunan pertama momentum sudut terhadap fungsi waktu. Dapat
dituliskan sebagai:
τ=d Ldt
Jika tidak ada momen gaya luar yang bekerja pada sistem (τ=0¿ ,maka:
Persamaan diatas berarti bahwa momentum sudut sistem selalu konstan (tidak
berubah sepanjang waktu baik besar maupun arahnya).
L = konstan
Dapat disimpulkan, dalam kasus tidak ada momen gaya luar,
Iω=konstan
Iω=I 0 ω0
Dimana I0 dan I adalah momen inersia mula-mula dan momen inersia akhir.
Sedangkanω0 dan ω menyatakan kecepatan sudut mula-mula dan kecepatan sudut akhir.
D.KESETIMBANGAN BENDA TEGAR
Bangunan tinggi dapat berdiri kokoh , kita dapat berdiri tegak lurus atau lampu
dapat tergantung semua ini disebabkan karena mereka dalam keadaan seimbang.
Ada dua macam keseimbangan :
Keseimbangan statik , yaitu keseimbangan ketika benda diam.
Keseimbangan dinamik , yaitu keseimbangan ketika benda bergerak dengan
kecepatan tetap.
I. Keseimbangan Titik
Gaya Resultan
Anggap suatu partikel atau benda titik mengalami 3 buah gaya F1 , F2 ,dan F3 .
Resutan dari ketiga gaya ini merupakan suatu gaya tunggal:
R = ∑Fi = F1 + F2 + F3
Syarat Keseimbangan
Anggap suatu partikel (benda titik )menerima beberapa buah gaya. Resultan gaya-
gaya ini adalah R. Apa yang terjadi jika partikel tersebut diberi gaya yang besarnya
sama dengan R tetapi arahnya berlawanan ? Resultan gaya-gaya ini akan sama dengan
nol .
Karena resultan total gaya-gaya yang bekerja pada partikel itu sama dengan nol,
maka menurut hokum II Newton (F = ma ) percepatan partikel juga nol . Artinya
partikel yang semula diam akan tetap diam. Partikel dalam kondisi ini dikatakan berada
dalam keseimbangan static. Jadi dapat dikatakan bahwa suatu partikel berada dalam
keseimbangan static jika jumlah gaya atau resultan gaya yang bekerja pada partikel ini
sama dengan nol.
Secara matematis pernyataan tersebut dapat ditulis:
∑Fx= 0 ………………………………….(1)
∑Fy=0 ………………………………….(2)
Persamaan (1) dan (2) dinamakan Syarat Keseimbangan benda titik.
II.Resultan Gaya pada Benda Tegar
Benda tegar atau benda pejal merupakan benda yang tidak mengalami perubahan
bentuk atau volume walaupun diberi gaya atau momen gaya.

Seperti halnya pada benda titik, pada benda tegar gaya-gaya yang bekerja juga
dapat digantikan dengan satu gaya tunggal asalkan arah resultan dari gaya-gaya (R)
yang bekerja adalah tegak lurus dengan arah momen gaya () yang ditimbulkan oleh
gaya-gaya ini. Maksud kata “digantikan” disini adalah jika seluruh gaya-gaya yang
bekerja pada benda kita gantikan dengan suatu gaya lain, kondisi gerak benda akan tetap
sama.
Misalkan gaya-gaya yang bekerja pada benda tegar adalah F1, F2, F3,…..,dan titik
tangkap masing-masing gaya adalah r1, r2, r3,…….
Keadaan gerak benda akan tetap sama jika jumlah gaya (∑F) dan jumlah momen
gaya (∑) yang bekerja padanya tetap sama. Misalkan kita gantikan gaya-gaya tersebut
dengan suatu gaya Ft yang bekerja pada titik tangkap rt, maka Ft dan rt harus memenuhi :
Ft = F1 + F2 + F3 +……………
rt X Ft = r1 X F1 + r2 X F2 + r3 X F3 +….
Ternyata Ft sama dengan resultan gaya R. Dari persamaan diketahui
rt X Ft = r1 X F1 + r2 X F2 + r3 X F3 +……..=
rt X R =
(Catatan : momen gaya diukur terhadap sembarang titik)
Karena didapat dari hasil kali silang antara rt dan R, maka arah R pastilah tegak
lurus arah . JAdi, terbukti bahwa gaya-gaya yang bekerja dapat digantikan dengan gaya
tunggal. Dengan catatan arah resultan gaya R harus tegak lurus dengan arah total
momen gaya ().
Syarat agar R dan tegak lurus ( R. = 0 )
R dan akan tegak lurus ( R. = 0 ) jika gaya-gaya yang bekerja pada sebuah
benda tegar mempunyai sifat sebagai berikut :
a) Gaya-gaya sepusat , maksudnya semua gaya yang bekerja mempunyai titik
tangkap yang sama.
b) Gaya-gaya sebidang,maksudnya semua gaya yang bekerja terletak pada bidang
yang sama.
c) Gaya-gaya paralel , maksudnya semua gaya yang bekerja sejajar.
Gaya-gaya sepusat
Gambar 12.3a melukiskan dua buah gaya F1 dan F2 yang bekerja pada suatu titik
pada sebuah benda tegar.
Titik tangkap dari resultan gaya terletak pada titik tangkap kedua gaya ini.
Mari kita hitung momen gaya akibat kedua gaya ini . Untuk mempermudah kita
ambil momen ini terhadap titik O.
0 = r X F1 + r x F2
= r X (F1 + F2 ) = r X R
Pada perkalian silang (cross product ) , vektor hasil perkalian selalu tegak lurus
dengan vector-vektor yang dikalikan . Dengan demikian terbukti bahwa R tegak lurus
terhadap 0 .
b) Gaya-gaya sebidang
Gambar 12.4 melukiskan 3 buah gaya F1,F2 dan F3 pada bidang xy (sebidang ) .
Titik tangkap ketiga gaya berada pada titik (x1,y1 ) , ( x2,y2 ) dan (x3,y3).i
Gaya resultan R :
R = F1 + F2 + F3
= (Fx + Fx2 + Fx3 ) i + ( Fy + Fy2 + Fy3 ) j
Vector posisi titik tangkap ketiga gaya adalah :

r1 = x1 i + y1 j
r2 = x2 i + y2 j
r3 = x3 I + y2 j
Momen gaya total akibat gaya-gaya yang bekerja pada benda ( terhadap titik O )
adalah
0 = ri X Fi = r1 X F1 + r2 X F2 + r3 X F3
=(x1fy1 – y1 Fx1 ) k + ( x2Fy2 – y2 Fx2 ) k + ( x3Fy3 – y3 Fx3 ) k
=(xiFy1 + x2Fy2 + x3Fy3 ) k – (y1Fy1 + y2Fy2 + y3Fy3 ) k
=0
Ternyata R. 0 = 0, sehingga dapat disimpulkan bahwa ketiga gaya ini dapat
digantikan dengan sebuah gaya tunggal.
Besar gaya tunggal ini sama dengan besar gaya resultan. Lokasi titik tangkap gaya
tunggal ini adalah (xc, yc) dimana
ϰc=ϰ1 F y 1+ϰ2 F y2+ϰ3 F y 3
Ry
yc=y1 Fϰ 1+ y2 Fϰ2+ y3 Fϰ 3
Rϰ
Bukti :
Vektor posisi titik tangkap gaya resultan:
Rc = xc I + yc j
Momen gaya di titik O akibat gaya resultan :
(0) = rc X R = (xcRy - ycRx) k
Karena gaya resultan dianggap sebagai pengganti dari gaya-gaya yang bekerja
pada benda, maka momen gaya yang disebabkan oleh gaya resultan ini harus sama
dengan momen gaya total yang ditimbulkan oleh tiap-tiap gaya yang bekerja. Dengan
kata lain
(0) gaya-gaya = (0) resultan

(ϰ¿¿1F y 1+ϰ2 F y 2+ϰ3 F y 3)k – ( y1 Fϰ1+ y2 Fϰ 2+ y3 Fϰ 3 )k=(ϰc R y− yc Rϰ)k ¿
Atau , ϰc Ry=ϰ1 F y 1+ϰ2 F y 2+ϰ3 F y 3
ϰc=ϰ1 F y 1+ϰ2 F y2+ϰ3 F y 3
Ry
yc Rϰ= y1 Fϰ 1+ y2 Fϰ2+ y3 Fϰ 3
yc=y1 Fϰ 1+ y2 Fϰ2+ y3 Fϰ 3
Rϰ
Secara umum koordinat titik tangkap resultan dapat ditulis sebagai
ϰc=∑ F yi ϰ i
R y
yc=∑ Fϰi y i
Rϰ
Rϰ=∑i
Fϰi
R y=∑i
F yi
Gaya-gaya sejajar
Gambar 12.6a melukiskan 3 gaya F1, F2, dan F3 yang sejajar sumbu y dengan
titik tangkap masing-masing gaya pada titik (x1, y1, z1) , (x2, y2, z2) , (x3, y3, z3) dan
besarnya masing-masing gaya adalah F1, F2, dan F3.
Resultan gaya R :
R = F1 + F2 + F3
Arah gaya resultan sudah tentu berada pada sumbu y karena arah ketiga gaya
penyusunnya semuanya berada pada sumbu y.
R = ( F1+ F2 +F3) j
Vektor posisi titik tangkap dari ketiga gaya adalah :
r1 = x1 +y1 j + z1 k
r2 = x2 + y2 j + z2 k
r3 = x3 + y3 j + z3 k
Momen gaya total (terhadap titik o)
¿∑i
ri × F i
= -(zi Fy1 +z2Fy2 + z3Fy3) i + (x1Fy1 + x2Fy2 + x3Fy3) k
R. 0 = ( F1 + F2 + F3) j . (x1Fy1 + x2Fy2 + x3Fy3) k – (z1Fy1 + z2Fy2 + z3Fy3) i
= 0
Ternyata R. o = 0 sehingga dapat disimpulkan bahwa ketiga gaya dapat
digantikan dengan sebuah gaya tunggal. Gaya tunggal ini sama dengan gaya resultan :
R = (F1 + F2 + F3 ) j
Lokasi titik tangkap gaya tunggal (gaya resultan) ini adalah ( xci + ycj + zck ) dapat
dicari sebagai berikut :
Vektor posisi titik tangkap :
rc = xci + ycj + zck
Momen gaya di titik O akibat gaya resultan adalah :
( 0) = rc x R = -zcRy i + xcRyk
Karena gaya resultan dianggap sebagai pengganti gaya-gaya, maka momen gaya
akibat gaya resultan ini harus sama dengan momen gaya total akibat gaya gaya yang
bekerja. Dengan kata lain
III.Syarat Kesetimbangan benda tegar
Telah kita lihat bahwa adalam keadaan tertentu gaya gaya yang bekerja pada suatu
benda tegar dapat digantiakan oleh sebuah gaya tunggal dengan arah dan titik tangkap
tertentu. Jika benda diberikan gaya lain yang besarnya sama tetapi arahnya berlawanan
dengan gaya tunggal pengganti, maka benda tidak akan bergarak translasi ataupun
berputar (berotasi). Keadaaan tidak bergerak translasi dan rotasi ini dinamakan keadaan
seimbang.
Pada keadan kesetimbangan, jumlah gaya yang bekerja sama dengan nol dan
jumlah momen gaya terhadap sembarang titik juga sama dengan nol.
E. PUSAT MASSA DAN TITIK BERAT
I.Pusat masa
1) Titik pusat massa dapat dianggap sebagai suatu titik dimana masa system dapat
dikonsentrasikan.
2) Gaya yang bekerja di titik pusat massa suatu system akan membuat system bergerak
translasi murni (tanpa rotasi)
JIka kita mempunyai system yang terdiri dari n buah benda yang bermassa
masing-masing m1, m2, m3, ….., mn dan terletak pada koordinat (x1,y1), (x2,y2), (x3,y3)
……….. (xn,yn), maka koordinat pusat masa dari system ini (xpm,ypm) dimana xpm dan ypm
didefinisikan sebagai berikut:
ϰ pm=ϰ1 m1+ϰ2m2+ϰ3m3+…+ϰn mn
m1+m2+m3+…+mn
y pm=y1 m1+ y2 m2+ y3 m3+…+ yn mn
m1+m2+m3+…+mn
II. Titik Berat
Berat suatu benda tergantung pada gravitasi di tempat benda itu berada. Berat
benda dapat dianggap terkonsentrasi pada suatu titik. Titik ini dinamakan pusat gravitasi

atau titik berat. Dalam medan gravitasi homogen (medan gravitasi di setiap titik
sama)lokasi titik berat sama dengan lokasi pusat massa.
X1,y1 X2,y2 X1,y1 X2,y2
m1 m2
m1g m2g
m3 X3,y3 X3,y3
m3g
W = mg
(a) (b)
Keterangan gambar: benda dibagi dalam sejumlah besar partikel-partikel kecil
dengan massa m1, m2, m3,….. yang terletak pada koordinat (x1,y1), (x2,y2), (x3,y3),…
koordinat x pusat massa untuk system ini adalah :
ϰ pm=ϰ1 m1+ϰ2m2+ϰ3m3 …
m1+m2+m3 …=∑
i
miϰ i
∑i
mi
Gaya berat yang ditimbulkan tiap partikel memberikan momen gaya terhadap titik
0 yang besarnya sama dengan berat partikel dikalikan dengan lengan momennya,
misalnya berat m1g momen gayanya m1g1x1 dan seterusnya.
Anggap suatu gaya W (besarnya sama dengan berat benda) diletakkan di suatu
titik sedemikian sehingga momen gaya yang dihasilkannya sama dengan jumlah total
momen gaya yang dihasilkan oleh seluruh partikel. Titik ini adalah titik berat benda.
(τ¿¿0)akibat W=(τ¿¿0)akibat semua partikel ¿¿
−W × ϰtb=−m1 g1ϰ1−m2 g2 ϰ2−m3 g3 ϰ3−…

ϰ t b=m1 g1 ϰ1+m2 g2ϰ2+m3 g3 ϰ3+…
W
ϰ tb=m1 g1ϰ1+m2 g2 ϰ2+m3 g3 ϰ3+…
m1 g+m2 g+m3 g+…
¿∑ miϰ i
∑ mi
Terbukti bahwa koordinat titik berat sama dengan koordinat titik pusat massa
ketika medan gravitasi uniform!
I. Titik Berat Benda Tegar
Benda Beraturan
Titik berat benda yang beraturan dan sederhana seperti segiempat atau segitiga,
terletak pada perpotongan garis beratnya.
Misalnya segiempat berukuran a X b. Titik berat segiempat tersebut adalah
terletak pada perpotongan kedua garis berat yaitu pada titik (1/2 a, ½ b) (di tengah-
tengah benda)
b
a
Suatu segitiga mempunyai garis berat seperti nampak pada gambar dan titik
beratnya terletak pada perpotongan ketiga garis berat itu yaitu pada titik (0, 1/3 t)
Gabungan beberapa benda
Untuk gabungan dari beberapa benda tegar seperti tampak pada gambar. Titik
beratnya (anggap g uniform) dicari dengan menggunakan rumus ¿∑ miϰ i
∑ mi
dimana
(x1,y1), (x2,y2), (x3,y3) menyatakan titik berat masing-masing benda tegar.
(½ a, ½ b)

TABEL TITIK PUSAT MASSA BENDA
GAMBAR NAMA LETAK TITIK BERAT KETERANGAN
y0
A Z B
Garis lurus y0 = ½ ABZ= ditengah-tengah
AB
Z
A R y0` B
M
Busur lingkaran y0=ABAB
R
AB = Tali busur AB
AB= busur AB
R= jari-jari
lingkaran
Z
y0
M
Busur setengah
lingkarany0=
2 Rπ
R= jari-jari
lingkaran
A Z
B
R y0
x
M
Juring lingkaran y0=ABAB
.23
R
AB = Tali busur AB
AB= busur AB
R= jari-jari
lingkaran
Z
y0
M
Setengah
lingkarany0=
4 R3 π
R = jari-jari
lingkaran
Selimut setengah
lingkarany0=
12
RR= jari-jari
lingkaran

Selimut kerucuty0=
13
t t = tinggi kerucut
Setengah bola y0=38
R R= jari-jari bola
Limas y0=14
t t= tinggi limas
Kerucut y0=14
t t= tinggi kerucut
Selimut limas y0=13
t t = tinggi limas

BAB III
METODOLOGI PRAKTIKUM
A. Alat dan Bahan Praktikum
Bahan-bahan yang diperlukan dalam melaksanakan praktikum menentukan titik
berat suatu benda datar tak beraturan adalah sebagai berikut:
1. Kertas karton
2. Kertas millimeter block
3. Lem kertas
4. Benang
5. Kertas Kerja (tabel data hasil pengukuran)
Alat-alat yang diperlukan dalam melaksanakan praktikum menentukan titik berat
suatu benda datar tak beraturan adalah sebagai berikut:
1. Statif
2. Penggaris
3. Bolpoin
4. Gunting kertas
5. Kamera
B. Desain
Praktikum
Rancangan dasar dari praktikum mentukan titik berat suatu benda datar tak
beraturan adalah dengan
1. Menentukan tiga titik tangkap dari garis-garis berat suatu benda;
2. Menentukan garis-garis berat dari benda dengan cara menggantungnya pada
seutas benang. Setelah benda diam, garis berat benda dilukiskan lurus terhadap
benang.
3. Menentukan titik potong dari beberapa garis berat yang yang telah dilukiskan.
Titik potong tersebut merupakan titik berat benda.
Untuk menguji ketepatan dari titik benda yang telah ditemukan dari
perpotongan garis-garis berat benda, maka desain praktikumnya adalah sebagai
berikut.
1.Menimbang massa benda sebelum dipisahkan menjadi beberapa bagian;
2.Memotong benda menjadi beberapa bagian
3.Menimbang massa dari setiap potongan bagian benda
4.Menentukan titik berat dari masing-masing potongan benda dengan metode yang
sama dengan menentukan titik berat benda sebelum dipotong;
5.Menggabungkan kembali potongan-potongan benda menjadi benda yang utuh
pada kertas millimeter block.
6.Menentukan koordinat dari titik berat sistem benda (titik berat benda sebelum
dipotong yang telah digambarkan sebelumnya):
7.Menentukan koordinat titik berat dari masing-masing bagian/ potongan benda
8.Menghubungkan titik berat masing-masing potongan benda dengan titik berat
sistem benda
C. Pengolahan dan Analisis Data
M M1 M2 M1 + M2 X Y X1 Y1 X2 Y2 M.X M.Y M1.X1+M2.X2 M1.Y1+M2.Y2
Data hasil pengukuran variabel-variabel praktikum dicatat secara teliti dalam table
di kertas kerja. Variabel dari praktikum menentukan titik berat suatu benda datar tak
beraturan adalah massa sistem benda(massa benda secara keseluruhan sebelum
dipotong-potong menjadi beberapa bagian, massa dari setiap potongan-potongan benda,
serta koordinat dari titik benda system benda maupun koordinat potongan-potongan
benda dalam koordinat cartesius.
Format Tabel dalam kertas kerja untuk pengolahan dan analisi data adalah sebagai
berikut:
Teknik menganalisa data untuk menguji ketepatan pengukuran titik berat adalah
dengan memerikas ekuivalensi dari kolom M.X dengan kolom M1.X1+M2.X2 dimana
kedua kolom pada table tersebut merupakan angka penunjuk letak titik berat benda pada
sumbu x jika system benda diletakkan pada koordinat cartesius. Jika harga pada kedua
kolom tersebut equivalent, yang artinya keduanya memiliki harga yang sama atau
mendekati sama, maka pengukuran titik berat benda pada sumbu x tersebut tepat.
Demikian halnya dengan harga dari kolom M.Y dengan kolom M1.Y1+M2.Y2,.Jika harga
pada kedua kolom tersebut equivalent, jika keduanya memiliki harga yang sama atau
mendekati sama, maka pengukuran titik berat benda pada sumbu y tersebut tepat.
Yang dimaksud dengan titik berat dari benda yang sedang diukur adalah X dan Y
dalam koordinat cartesius, yang harganya sama atau mendekati sama dengan:
M1 x1+M 2 x2
M 1+M 2
, untuk harga dari X
M1 y1+M 2 y2
M 1+M 2
, untuk harga dari Y


BAB IV
HASIL DAN PEMBAHASAN
I. Pembahasan
Dengan pengukuran terhadap massa benda sebelum dipisahkan dan massa
masing-masing bagian benda yang diukur dengan teliti, maka diperoleh nilai M (massa
benda sebelum dipotong menjadi dua bagian menurut garis beratnya) sama dengan
nilai M1 (massa bagian benda ke-1) ditambah dengan M2 (massa bagian benda ke-2).
Ekuivalensi tersebut dapat dituliskan sebagai berikut:
M ≡ M1 + M2
4,3 g≡ 2,3 g + 2,5 g
Dari hasil pengukuran terhadap koordinat jarak titik berat benda sebelum dipotong
dan titik berat masing-masing bagian benda pada sumbu-x koordinat cartesius,
diperoleh harga M.X mendekati harga M1.X1+M2.X2.Kesamaan tersebut dapat dituliskan
sebagai berikut:
M . X ≈M1.X1+M2.X2
57,6 g.cm ≈17,94 + 39,75 = 57,69 g.cm
Sementara dalam sumbu-y, terlihat bahwa harga M.Y mendekati harga
M1.Y1+M2.Y2.
M.Y ≈ M1.Y1+M2.Y2.
38,4 g.cm ≈ 17,02 + 21,75 = 38,77 g.cm
Dari ekuivalensi harga-harga MX dan MY terhadap sesamanya, dapat
disimpulkan bahwa nilai hasil perkalian dari massa benda (sebelum dipotong) dengan
jarak koordinat titik berat pada sumbu x mendekati nilai jumlah keseluruhan dari hasil
kali antara massa masing-masing bagian benda dengan jarak koordinat titik berat pada
sumbu x dari bagian benda tersebut. Demikian juga dengan sumbu y, nilai hasil
perkalian dari massa benda dengan jarak koordinat titik berat pada sumbu y mendekati
nilai jumlah keseluruhan dari hasil kali antara massa masing-masing bagian benda
dengan jarak koordinat titik berat pada sumbu y.

Jika kesalahan pengukuran diabaikan, maka diperoleh nilai hasil perkalian dari
massa benda (sebelum dipotong) dengan jarak koordinat titik berat pada sumbu x,y
mendekati nilai jumlah keseluruhan dari hasil kali antara massa masing-masing bagian
benda dengan jarak koordinat titik berat pada sumbu x,y dari bagian benda tersebut.
Secara matematis dapat dituliskan
M.X = M1.X1+M2.X2 dan M.Y = M1.Y1+M2.Y2
Dari keseluruhan persamaan yang diperoleh dari simpulan data hasil penelitian,
diperoleh kesimpulan bahwa titik berat sebuah system benda (gabungan benda) sama
dengan jumlah total titik berat dari masing-masing bagian penyusun benda.
DanXo = M1 X1+M 2 X2
M 1+M 2Yo =
M1 Y 1+M 2Y 2
M 1+M 2