laporan pengendalian tekanan kel 3 2a
TRANSCRIPT
LAPORAN PRAKTIKUM PENGENDALIAN PROSES
Pengendalian Tekanan
Laporan ini disusun untuk memenuhi tugas Pengendalian Proses pada Semeter IVJurusan Teknik Kimia
Dosen Pembimbing : Harita Nurwahyu Chamidy, LRSC, MT
Oleh :
Fiqhi Pridayanti Mukhlishah 111411010
Rahmi Pujiyati Putri 111411025
Ugi Muhammad Apriyanto 111411028
Kelompok 3
Kelas 2 A
Tanggal Praktikum: 23 April 2013
Tanggal Pengumpulan Laporan: 30 April 2013
PROGRAM STUDI D-3 TEKNIK KIMIA
POLITEKNIK NEGERI BANDUNG
2012
PENGENDALIAN TEKANAN
I TUJUAN
Praktikum ini memberi kompetensi dasar pada mahasiswa yaitu kemampuan untuk dapat
mengendalikan sistem tekanan. Adapun tujuan praktikum adalah mempelajari pengaruh
nilaimparameter pengendali pada respons tekanan.
II DATA PENGAMATAN
Data 1:
o Alat pengendalian tekanan
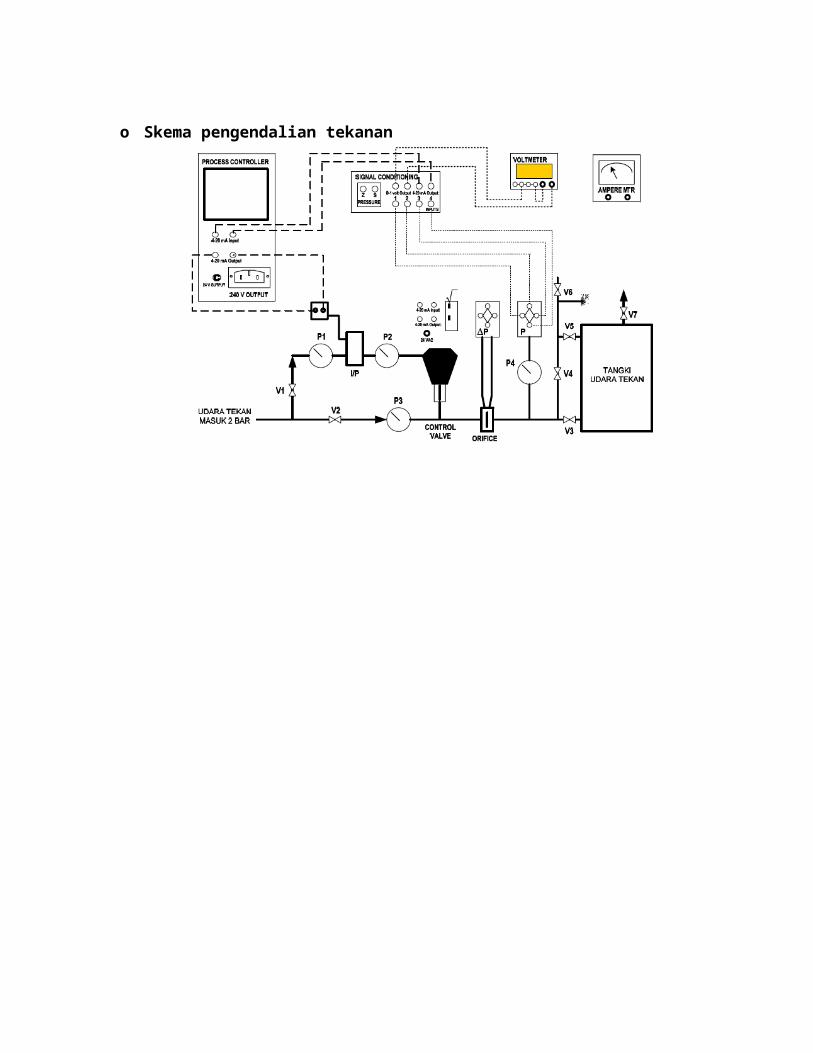
o Skema pengendalian tekanan
Data 2:
GRAFIK SP DAN PV TERHADAP WAKTU DARI PERCOBAAN PENGENDALIAN TEKANAN TANPA REDAMAN
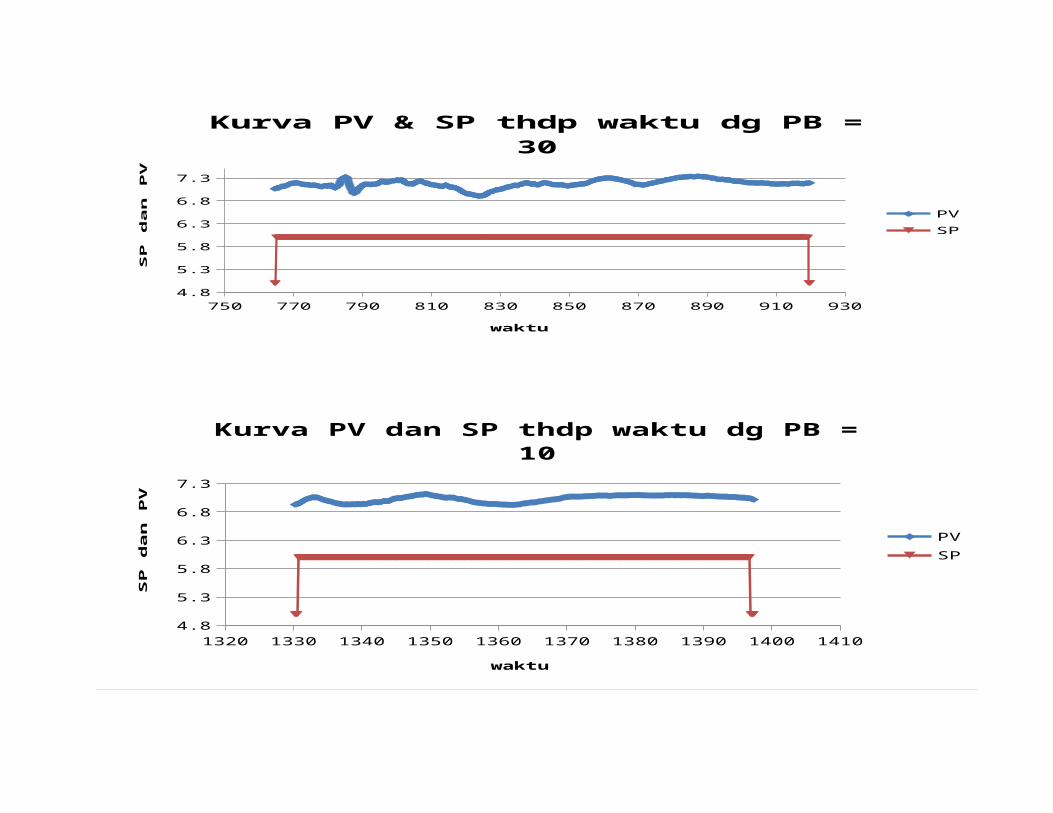
a) Pengendalian Proporsional (P)
590 600 610 620 630 640 650 6605
5.5
6
6.5
7
Kurva SP dan PV thdp waktu dengan PB = 50
PVSP
waktu
PV
da
n S
P

750 770 790 810 830 850 870 890 910 9304.8
5.3
5.8
6.3
6.8
7.3
Kurva PV & SP thdp waktu dg PB = 30
PVSP
waktu
SP
dan
PV
1320 1330 1340 1350 1360 1370 1380 1390 1400 14104.8
5.3
5.8
6.3
6.8
7.3
Kurva PV dan SP thdp waktu dg PB = 10
PVSP
waktu
SP
dan
PV
1500 1510 1520 1530 1540 1550 1560 1570 1580 15904.8
5.3
5.8
6.3
6.8
7.3
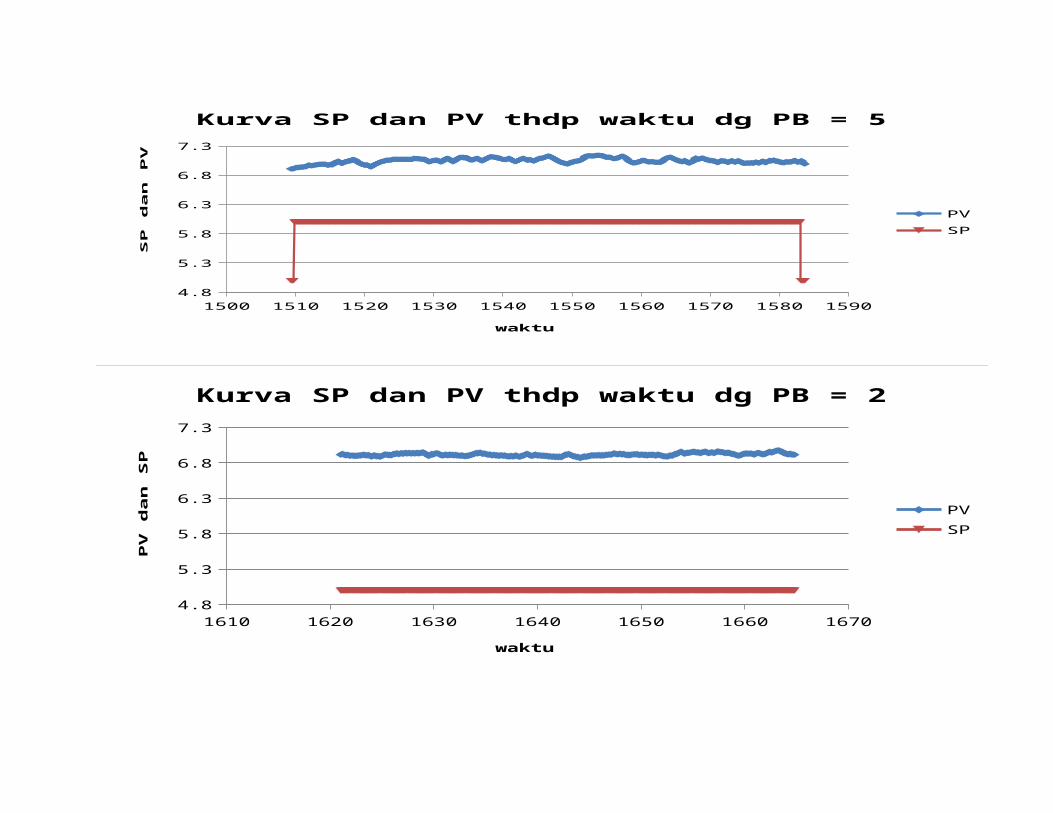
Kurva SP dan PV thdp waktu dg PB = 5
PVSP
waktu
SP
dan
PV
1610 1620 1630 1640 1650 1660 16704.8
5.3
5.8
6.3
6.8
7.3
Kurva SP dan PV thdp waktu dg PB = 2
PVSP
waktu
PV
dan
SP
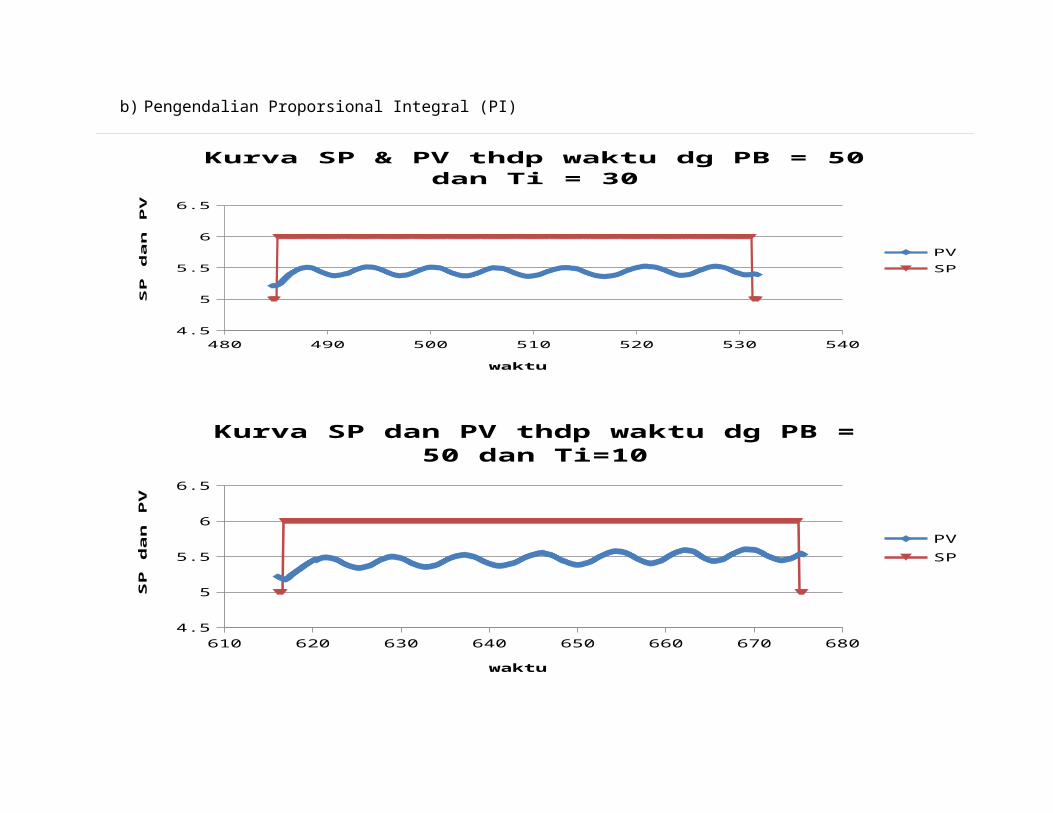
b) Pengendalian Proporsional Integral (PI)
480 490 500 510 520 530 5404.4
4.6
4.8
5
5.2
5.4
5.6
5.8
6
6.2
Kurva SP & PV thdp waktu dg PB = 50 dan Ti = 30
PVSP
waktu
SP
dan
PV
610 620 630 640 650 660 670 6804.4
4.6
4.8
5
5.2
5.4
5.6
5.8
6
6.2
Kurva SP dan PV thdp waktu dg PB = 50 dan Ti=10
PVSP
waktu
SP
dan
PV
770 780 790 800 810 820 830 8404.4
4.6
4.8
5
5.2
5.4
5.6
5.8
6
6.2
Kurva SP dan PV thdp waktu dg PB = 50 , Ti= 5
PVSP
waktu
SP
dan
PV
910 920 930 940 950 960 970 9805
5.1
5.2
5.3
5.4
5.5
5.6
5.7
5.8
5.9
6
Kurva SP dan PV thdp waktu dg PB = 50 dan Ti = 2
PVSP
waktu
SP
dan
PV

1060 1065 1070 1075 1080 1085 1090 1095 1100 1105 11105
5.1
5.2
5.3
5.4
5.5
5.6
5.7
5.8
5.9
6
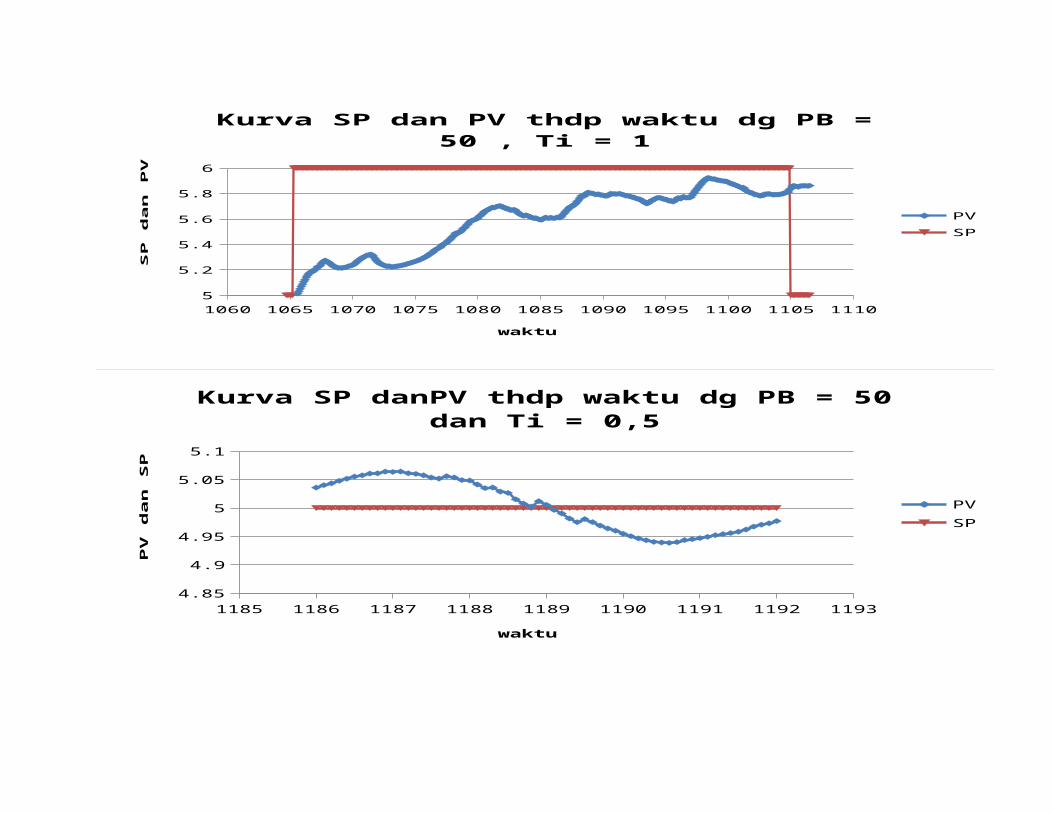
Kurva SP dan PV thdp waktu dg PB = 50 , Ti = 1
PVSP
waktu
SP
dan
PV
1185 1186 1187 1188 1189 1190 1191 1192 11934.85
4.9
4.95
5
5.05
5.1
Kurva SP danPV thdp waktu dg PB = 50 dan Ti = 0,5
PVSP
waktu
PV
dan
SP
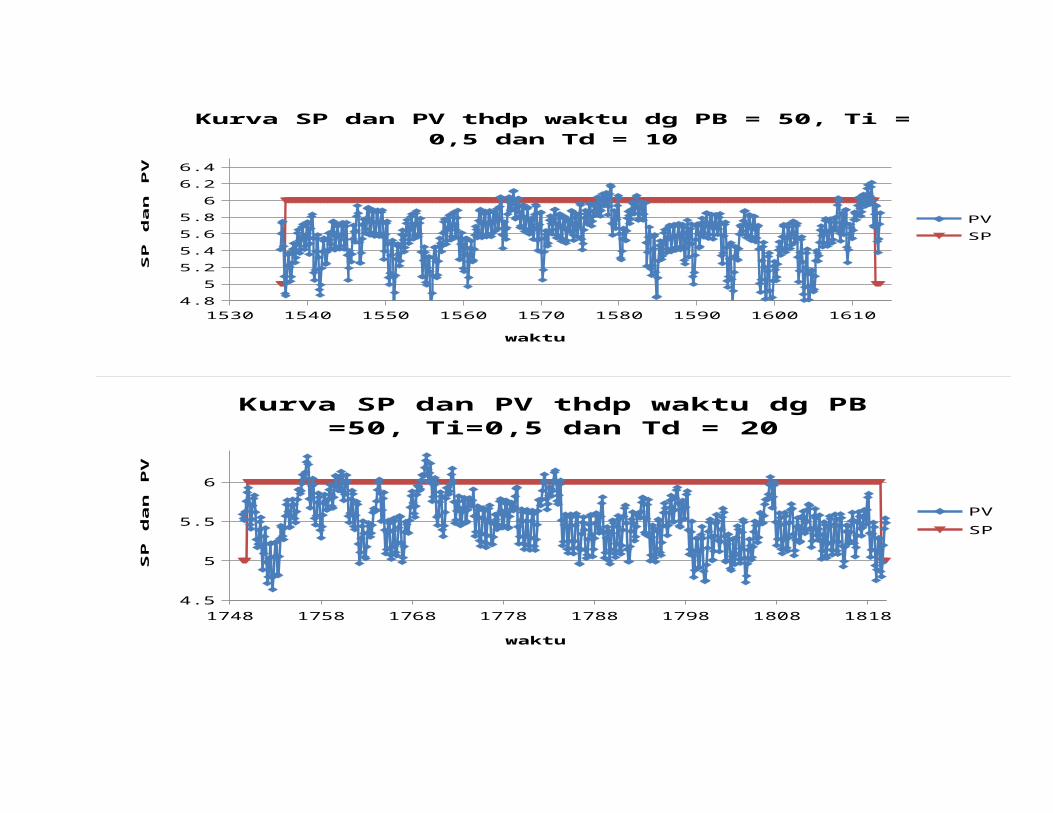
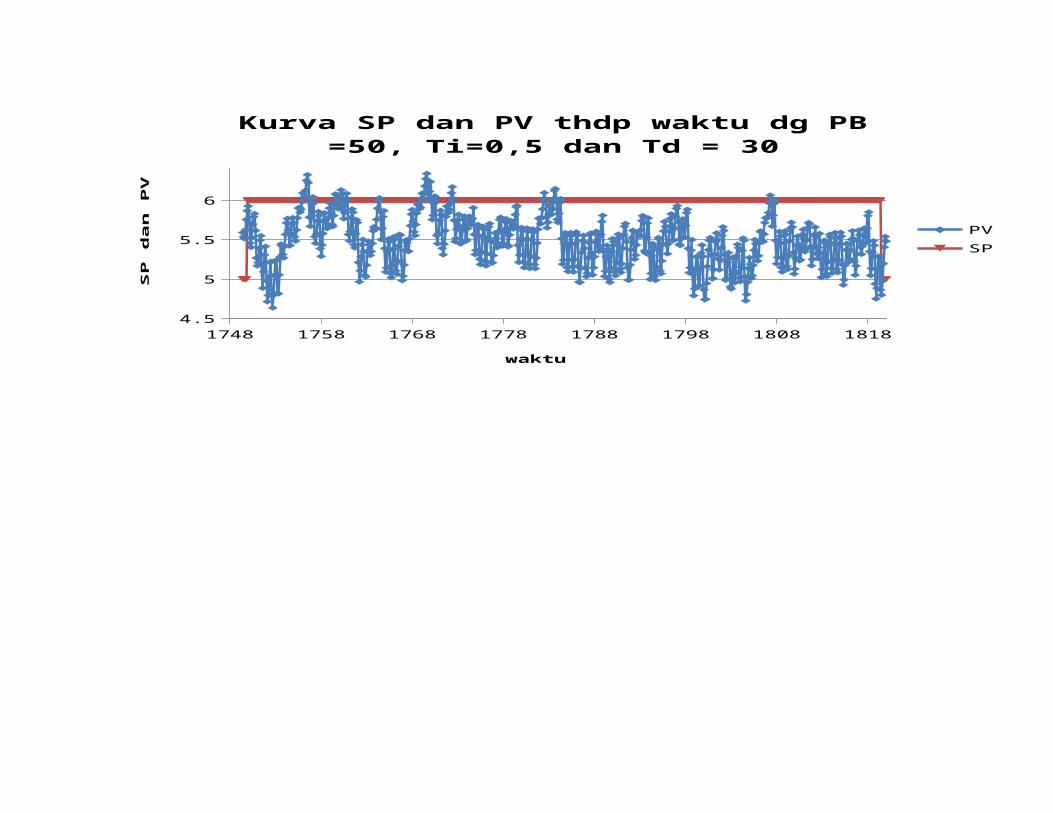
c) Pengendalian Proporsional Integral Derivatif (PID)
950 970 990 1010 1030 1050 1070 1090 11105
5.5
6
6.5
7
7.5
Kurva SP dan PV thdp waktu dg PB = 50, Ti = 0,5 dan Td = 2
PVSP
waktu
SP
dan
PV
1280 1290 1300 1310 1320 1330 1340 1350 1360 1370 13804.8
55.25.45.65.8
66.26.46.66.8
Kurva SP dan PV thdp waktu dg PB = 50, Ti = 0,5 dan Td = 5
PVSP
waktu
SP
dan
PV

1530 1540 1550 1560 1570 1580 1590 1600 16104.8
5
5.2
5.4
5.6
5.8
6
6.2
6.4
Kurva SP dan PV thdp waktu dg PB = 50, Ti = 0,5 dan Td = 10
PVSP
waktu
SP
dan
PV
1748 1758 1768 1778 1788 1798 1808 18184.5
4.7
4.9
5.1
5.3
5.5
5.7
5.9
6.1
6.3
Kurva SP dan PV thdp waktu dg PB =50, Ti=0,5 dan Td = 20
PVSP
waktu
SP
dan
PV
1748 1758 1768 1778 1788 1798 1808 18184.5
4.7
4.9
5.1
5.3
5.5
5.7
5.9
6.1
6.3
Kurva SP dan PV thdp waktu dg PB =50, Ti=0,5 dan Td = 30
PVSP
waktu
SP
dan
PV
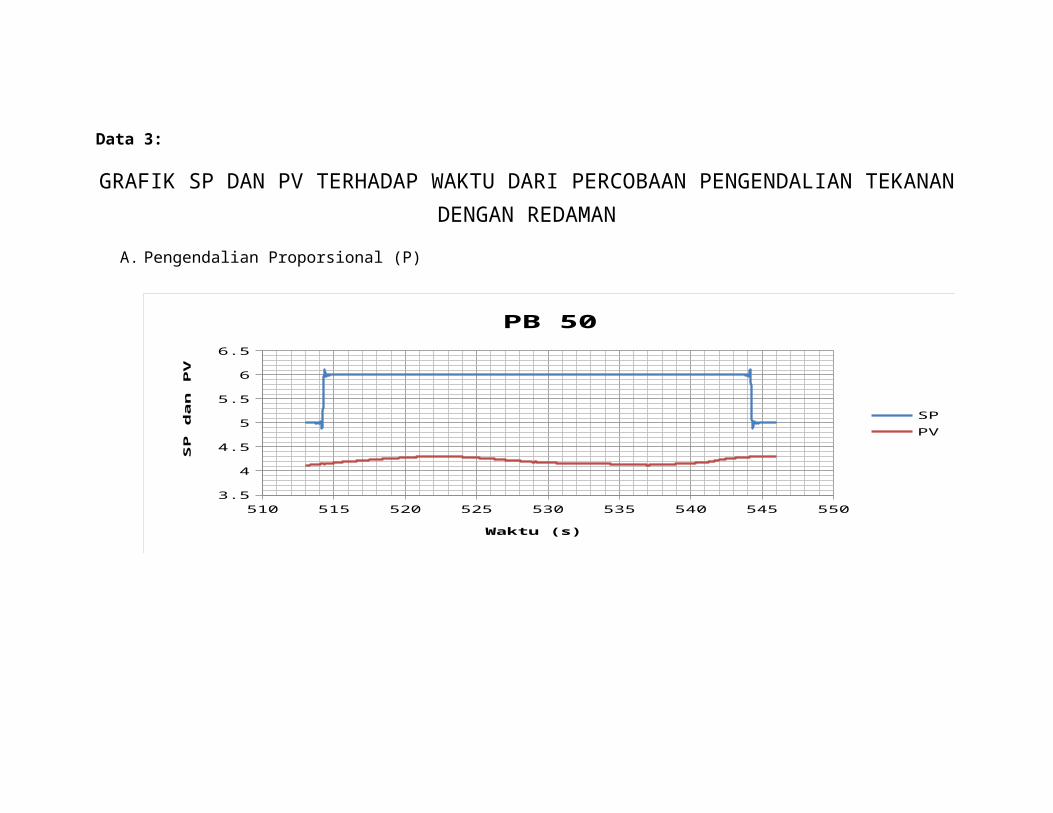
Data 3:
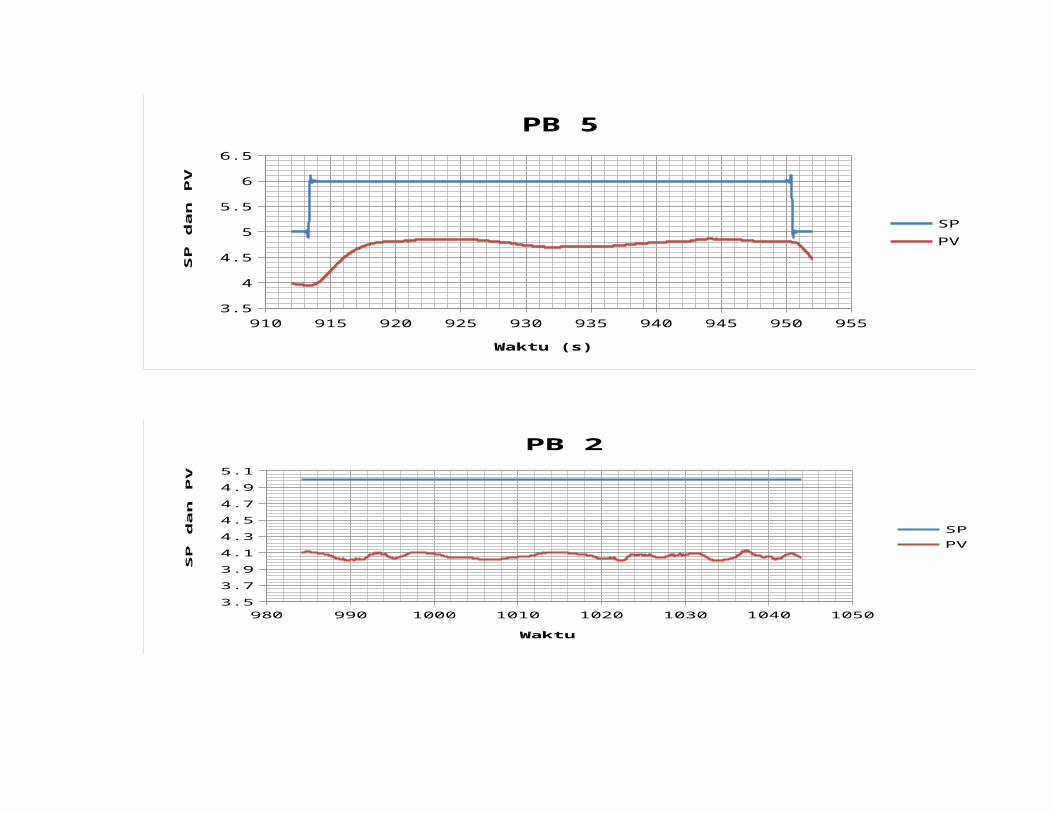
GRAFIK SP DAN PV TERHADAP WAKTU DARI PERCOBAAN PENGENDALIAN TEKANAN DENGAN REDAMAN
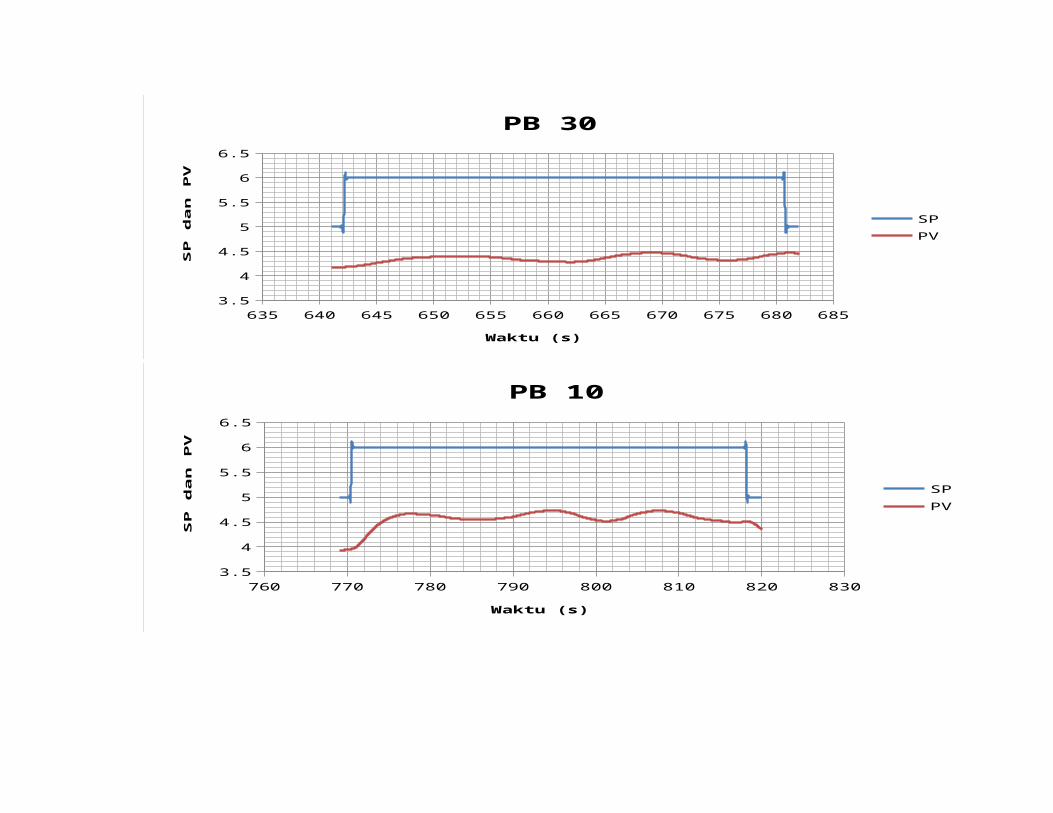
A. Pengendalian Proporsional (P)
510 515 520 525 530 535 540 545 5503.5
4
4.5
5
5.5
6
6.5
PB 50
SPPV
Waktu (s)
SP
dan
PV
635 640 645 650 655 660 665 670 675 680 6853.5
4
4.5
5
5.5
6
6.5
PB 30
SPPV
Waktu (s)
SP
dan
PV
760 770 780 790 800 810 820 8303.5
4
4.5
5
5.5
6
6.5
PB 10
SPPV
Waktu (s)
SP
dan
PV
910 915 920 925 930 935 940 945 950 9553.5
4
4.5
5
5.5
6
6.5
PB 5
SPPV
Waktu (s)
SP
dan
PV
980 990 1000 1010 1020 1030 1040 10503.5
3.7
3.9
4.1
4.3
4.5
4.7
4.9
5.1
PB 2
SPPV
Waktu
SP
dan
PV
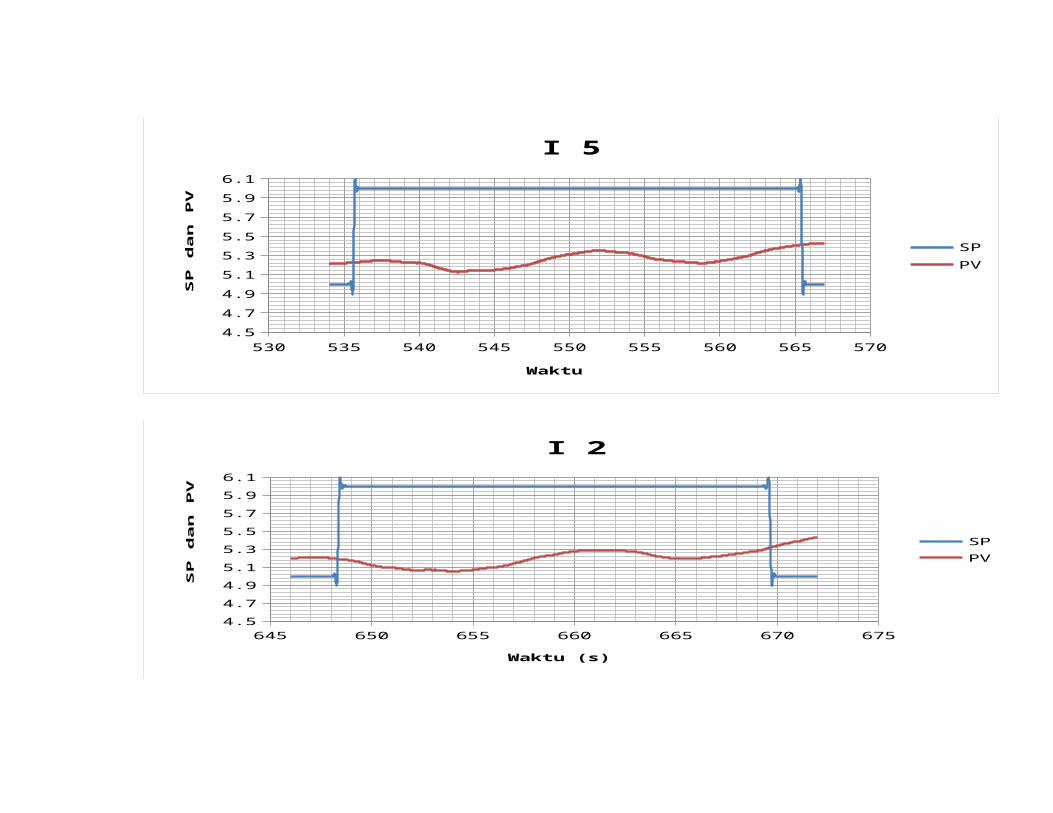
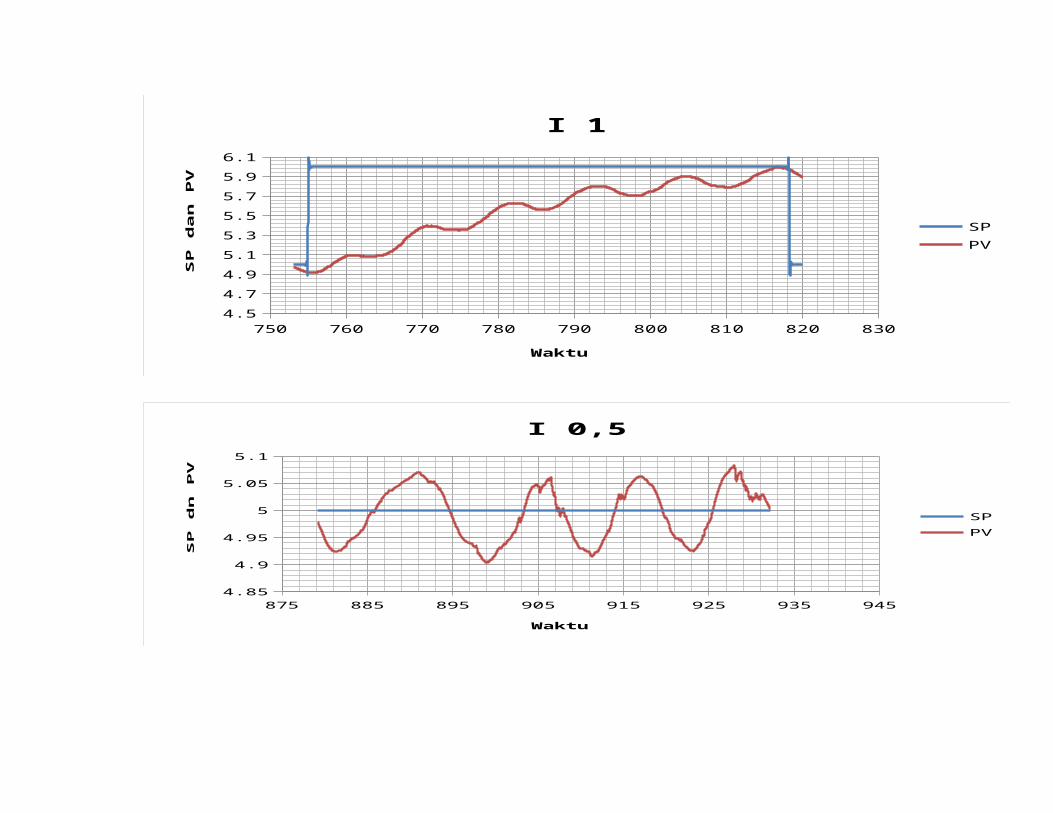
B. Pengendali Proporsional Integral (PI)
310 320 330 340 350 360 3704.5
4.7
4.9
5.1
5.3
5.5
5.7
5.9
6.1
I 30
SPPV
Waktu (s)
SP
dan
PV
430 435 440 445 450 455 460 4654.5
4.7
4.9
5.1
5.3
5.5
5.7
5.9
6.1
I 10
SPPV
Waktu (s)
SP
dan
PV

530 535 540 545 550 555 560 565 5704.5
4.7
4.9
5.1
5.3
5.5
5.7
5.9
6.1
I 5
SPPV
Waktu
SP
dan
PV
645 650 655 660 665 670 6754.5
4.7
4.9
5.1
5.3
5.5
5.7
5.9
6.1
I 2
SPPV
Waktu (s)
SP
dan
PV
750 760 770 780 790 800 810 820 8304.5
4.7
4.9
5.1
5.3
5.5
5.7
5.9
6.1
I 1
SPPV
Waktu
SP
dan
PV
875 885 895 905 915 925 935 9454.85
4.9
4.95
5
5.05
5.1
I 0,5
SPPV
Waktu
SP
dn
PV
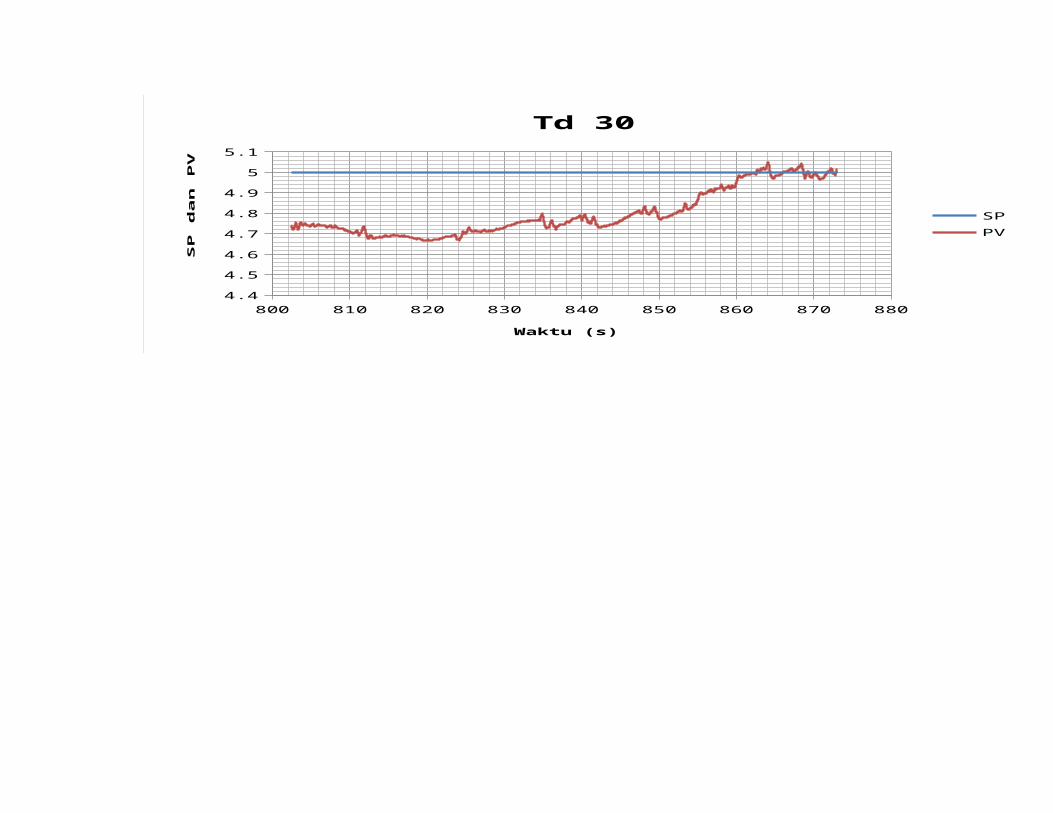
C. Pengendali Proporsional Integral Derivatif (PID)
255 260 265 270 275 280 285 290 295 3004.5
4.7
4.9
5.1
5.3
5.5
5.7
5.9
6.1
Td 2
SPPV
Waktu (s)
SP
dan
PV
375 380 385 390 395 400 405 410 415 420 4254.5
4.7
4.9
5.1
5.3
5.5
5.7
5.9
6.1
6.3
Td 5
SPPV
Waktu (s)
SP
dan
PV

525 530 535 540 545 550 555 560 565 5704.5
4.7
4.9
5.1
5.3
5.5
5.7
5.9
6.1
6.3
Td 10
SPPV
Waktu (s)
SP
dan
PV
690 700 710 720 730 740 750 7604.5
4.7
4.9
5.1
5.3
5.5
5.7
5.9
6.1
6.3
Td 20
SPPV
Waktu (s)
SP
dan
PV

800 810 820 830 840 850 860 870 8804.4
4.5
4.6
4.7
4.8
4.9
5
5.1
Td 30
SPPV
Waktu (s)
SP
dan
PV
III PEMBAHASAN
1. Pembahasan oleh Fiqhi Pridayanti Mukhlishah (111411010)
Praktikum kali ini praktikan melakukan percobaan pengendalian tekanan dengan
memvariasikan nilai parameter proporsional, integral, dan derivatif-nya. Praktikum ini
bertujuan untuk mengetahui pengaruh nilai parameter pengendali pada respons tekanan.
Percobaan yang dilakukan oleh praktikan adalah dengan pengendalian Proporsional (P),
pengendalian Proporsional Integral (PI), dan pengendalian Proporsional Integral Derivative
(PID).Terdapat 2 percobaan yang praktikan lakukan yaitu, tanpa tangki peredam dan dengan
tangki peredam.
Pada percobaan tanpa tangki peredam percobaan pertama yang dilakukan oleh
praktikan adalah pengendalian Proporsional. Pengendalian ini hanya memvariasikan nilai
proporsional band nya saja. Untuk mengubah-ubah nilai PB praktikan merubah nilai Kc nya.
Hal ini dikarenakan PB = 100 %
Kc. Sedangkan waktu integralnya di set sangat besar yaitu
100000 sekon. Hal ini bertujuan agar pengaruh waktu integral dianggap hampir tidak ada.
Nilai PB yang divariasikan adalah sebesar 50, 30, 10, 5 dan 2. Dari nilai-nilai parameter
tersebut praktikan dapat mengetahui kestabilan tekanan yang dihasilkan. Grafik yang
dihasilkan pada percobaan pertama ini praktikan dapat melihat pengaruh nilai PB pada
tekanan. Semakin kecil nilai PB maka osilasi akan semakin sering terjadi. Jika semakin besar
nilai PB maka akan semakin stabil aliran yang terkendali. Tetapi pengendalian Proporsional
ini tidak cukup akurat untuk menghasilkan Proses Variabel (PV) mendekati nilai Set Poin
(SP). Dengan menggunakan pengendalian Proporsional ini nilai-nilai PB harus besar agar
mencegah terjadinya osilasi. Tetapi, hal ini malah menyebabkan terjadinya penyimpangan
yang sering disebut offset. Agar mengurangi nilai offset yang ditimbulkan sebaiknya
menggunakan pengendalian Proporsional Integral (PI).
Percobaan kedua praktikan melakukan pengendalian Proporsional Integral (PI).
Percobaan ini memasukkan nilai PB yang terbaik yang dihasilkan pada percobaan pertama.
Nilai PB yang di pilih adalah 50%. Percobaan kedua ini praktikan melakukan nilai variasi
pada waktu integral (Ti) nya. Variasi waktu integralnya yaitu 30, 10, 5, 2, 1 dan 0,5 sekon.
Grafik yang dihasilkan pada percobaan kedua ini cukup baik. Karena nilai PV hampir
mendekati nilai SP. Tetapi dibandingkan waktu integral yang lain ternyata waktu integral 0,5
sekon adalah waktu yang paling baik dengan nilai PB 50%. Karena, respon PV untuk
mendekati SP lebih cepat dan cenderung langsung stabil.
Pada percobaan yang ketiga ini praktikan melakukan pengendalian Proporsional
Integral Derevative (PID). Percobaan ini praktikan memasukkan nilai PB 50%, nilai Ti 0,5
sekon dan variasi nilai waktu derevative (Td). Variasi waktu derevative adalah 2, 5, 10, 20
dan 30 sekon. Pengendalian PID ini menyebabkan respon yang lebih cepat. Derivative Action
dapat menyebabkan respon cepat tetapi sangat peka terhadap noise (gangguan) karena
derivative perubahan error persamaan yang ada di dalam PID adalah komponen simpul
umpan balik yang umum dalam sistem kontrol. Pengkontrol PID bisa mengatur keluaran
proses didasarkan pada penyebab dan laju perubahan deviasi, sehingga kontrol menjadi stabil
dan lebih akurat.
Pada percobaan yang menggunakan tangki peredam praktikan melakukan pengendalian
yang sama seperti tangki tanpa peredam. Yang membedakan hanyalah ditambahkan tangki
tekan.
Berdasarkan pegendalian yang telah dilakukan oleh praktikan dapat disimpulkan bahwa
pengendalian yang terbaik adalah pengendalian Proporsional Integral. Dari ketiga
pengendalian tersebut sifat pengendalian yang dilakukan adalah Direct Acting. Hal ini
dikarenakan jika nilai PV besar maka itu diakibatkan oleh tekanan yang keluar dari valve
juga akan besar. Jika tekanan dalam tangki melebihi SP maka dari control valve akan
memperkecil bukaannya. Dan percobaan dengan menggunakan tangki peredam ternyata lebih
baik dibanding tanpa peredam. Hal ini dikarenakan jika menggunakan peredam osilasi yang
dihasilkan berkurang.
2. Pembahasan oleh Rahmi Pujiyati Putri (111411025)
Pada praktikum kali ini, praktikan melakukan percobaan pengendalian tekanan
dengan mencoba – cobakan berbagai nilai pada parameter seperti proporsional, integral dan
derivative. Untuk tahap pertama praktikan mencobakan pengendalian dengan hanya
menggunakan parameter proporsional saja yang nilainya bervariasi yaitu, 50, 30, 10, 5dan 2.
Dari data praktikum ( grafik ) bagian pertama ini praktikan dapat menyimpulkan bahwa
semakin kecil nilai PB semakin sering osilasi terjadi, tapi semakin besar nilai proporsional
band yang diberikan dalam pengendalian maka akan semakin stabil tekanan yang terkendali.
Namun begitu pengendalian dengan parameter proporsional saja tidaklah cukup untuk
menjadikan process variable ( tekanan ) mendekati set point yang diinginkan karena dapat
dilihat dari grafik pada nilai PB yang praktikan anggap paling baik yaitu 50, tetap saja PV
belum mendekati SP ( terjadi offset ). Proses-proses cenderung menggunakan pengendali

dengan proporsional band besar untuk mencegah terjadinya osilasi, tetapi akibatnya timbul
penyimpangan. Penyetelan harga PB yang besar atau adanya perubahan pembebanan yang
besar akan menimbulkan penyimpangan. Suatu sistem dengan hanya menggunakan
pengendali proporsional selalu masih terdapat penyimpangan dari harga titik pengesetannya
sebagai suatu harga yang diinginkan, apabila sistem diberikan pembebanan yang berubah-
ubah. Perubahan pembebanan ini disebut sebagai gangguan terhadap sistem proses. Untuk
mengatasi hal tersebut, mode integral sering digabungkan dengan pengendali proporsional
sehingga penyimpangan dapat dieliminasi.
Selanjutnya praktikan melakukan percobaan kedua dengan mencoba – coba
memasukkan variasi nilai waktu integral ( Ti ) namun dengan tetap menggunakan nilai PB
yang paling baik menurut praktikan pada percobaan 1 yaitu PB = 50. Praktikan
memvariasikan nilai waktu integral yaitu 0,5 , 1, 2, 5, 10, dan 30. Praktikan menganggap nilai
Ti yang paling baik untuk disandingkan dengan nilai PB 200 adalah Ti = 0,5 karena praktikan
melihat dari grafik yang ditampilkan pressure controller di PC bahwa pada nilai intergral 0,5
tersebut respons PV untuk mendekati SP lebih cepat dan cenderung langsung stabil
dibandingkan ketika nilai integral lain dimasukkan. Rangkaian pengendali tekanan
merupakan contoh sistem yang memerlukan nilai PB yang besar, sehingga untuk sistem yang
demikian mode integral perlu ditambahkan pada pengendali. Apabila fungsi intergral
ditambahkan, maka secara kontinyu integral akan bereaksi terhadap keluaran sepanjang
terjadi penyimpangan dari titik pengesetan yang diinginkan, sehingga dihasilkan
penyimpangan = 0.
Terakhir, praktikan melakukan percobaan yang ke-3 yaitu dengan memasukkan nilai
waktu derivatif. Nilai derivatif ini disandingkan dengan nilai PB = 50 dan Ti = 0,5 dari
praktikum sebelumnya, sehingga parameter pengendalian menjadi PID. Derivative action
menyebabkan respon cepat, tapi meskipun respon cepat sistem menjadi peka terhadap noise
karena derivative perubahan error persamaan yang ada dalam PID, adalah komponen simpul
umpan balik yang umum dalam sistem kontrol. Pengkon t ro l mengambil harga terukur
dari suatu proses atau peralatan lainnya dan membandingkannya dengan harga
setpoint acuan, beda/deviasi (error signal) nya kemudian digunakan menyetel beberapa
masukan ke proses agar mengembalikan harga proses terukur ke harga setpoint yang
diinginkan. Tidak seperti pengkontrol sederhana, pengkontrol PID bisa mengatur keluaran
proses didasarkan pada penyebab dan laju perubahan deviasi, sehingga kontrol menjadi stabil
dan lebih akurat. Tapi tidak untuk sistem pengendalian untuk tekanan dibuktikan dengan
grafik PV terhadap SP yang langsung berosilasi dan tidak kunjung stabil. Jadi dapat
disimpulkan pengendalian tekanan ini lebih baik menggunakan parameter PI saja.
Pada percobaan yang menggunakan tangki peredam praktikan melakukan
pengendalian yang sama seperti tangki tanpa peredam. Yang membedakan hanyalah
ditambahkan tangki tekan. Pengendalian tekanan dengan peredam ini, di dapat niali PB
terbaik utnuk pengendalian adalah 50 dan TI adalah 0,5. Sedangkan pengaruh derivatif yang
diberikan kepada sistem, tetap menghasilkan osilasi seperti pengendalian tanpa redaman
hanya saja offset yang terjadi tidak terlalu jauh dari SP.
Adapun sifat pengendalian kali ini yaitu direct acting, karena jika nilai PV ( laju alir
tekanan ) besar maka berarti itu disebabkan oleh volume udara yang keluar dari valve juga
besar berarti tekanan akan kecil karena tekanan berbanding terbalik dengan volume. Jika
aliran udara tekan menyebabkan tekanan dalam tangki melebihi SP maka dari itu control
valve akan memperbesar bukaannya, karena itulah sifat dari pengendalian ini dapat
disimpulkan sebagai pengendalian direct acting.
3. Pembahasan oleh Ugi Muhammad Apriyanto (111411028)
Pada percobaan ini, dilakukan pengendalian tekanan (pressure) pada alat Pressure
Control. Tujuan daripada praktikum ini adalah mempelajari pengaruh parameter pengendali
pada respons aliran yang ditunjukkan oleh aplikasi Pressure Control yang dihubungkan
dengan alat kemudian dihubungkan dengan notebook, sehingga ilustrasi grafik akan muncul
pada display notebook yang sudah terinstal aplikasi Pressure Control.
Untuk menentukan pengendalian tekanan yang tepat, dilakukan tiga pengendali dalam
pengendalian aliran. Yaitu pengendali Proporsional (P), Proporsional-Integral (PI), dan
Proporsional-Integral-Derivatif (PID) dengan parameter pengendali yang divariasikan berupa
Proportional Band (PB), waktu integral, dan waktu derivatif. Ada dua percobaan yaitu
mengamati pengaruh parameter pengendali tanpa menggunakan tangki peredam dan dengan
menggunakan tangki peredam.
Pada awal pengoperasian, dilakukan pengaturan terhadap valve V2 dan V1 sehingga
menunjukkan tekanan 10 dan 18 psi, lalu menutup V3, V5, dan V6 dan mengatur bukaan V4

(tanpa menggunakan tangki peredam). Pada pengendalian proporsional, waktu derivatif 0,
dan waktu integral 100000 (sehingga pengaruh integral dapat diminimalisasi). Dilakukan
pengamatan terhadap nilai Proportional Band (PB) dengan variasi 2, 5, 10, 30, dan 50 [%].
Dari hasil pengamatan grafik, diperoleh grafik yang menurut praktikan lebih baik dari yang
lain, yaitu pada nilai PB sebesar 50%. Dapat terlihat dari grafik-grafik yang diperoleh,
pengaruh nilai PB terhadap kestabilan. Nilai PB yang kecil mengakibatkan ketidakstabilan
yang cenderung besar sehingga osilasi pun semakin besar. Sedangkan nilai PB yang besar
mengakibatkan PV stabil dengan respons yang lambat, namun kestabilan dapat dicapai,
sehingga osilasi dapat diminimalisasi. Dengan PB yang besar seharusnya offset akan dapat
diminimalkan. Namun PV belum bisa mendekati SP secara maksimal. Oleh karena itu,
dibutuhkan unsur integral dalam pengendalian.
Pada pengendalian Proporsional-Integral (PI), digunakan PB sebesar 50% yaitu nilai
PB terbaik hasil pengendalian Proporsional. Dilakukan variasi waktu integral sebesar 0,5; 1;
2; 5; 10; dan 30. Dari hasil pengamatan grafik, didapatkan grafik terbaik pada waktu integral
0,5. Karena respons PV terhadap MV berlangsung sangat cepat dan offset dapat
diminimalkan. Sehingga dari grafik yang didapatkan, pengaruh integral dapat diketahui, yaitu
apabila waktu integral semakin besar maka responsnya akan semakin lambat dan
ketidakstabilan semakin besar.
Pada pengendalian Proporsional-Integral-Derivatif (PID), dilakukan input nilai waktu
derivatif dengan variasi 2, 5, 10, 20, dan 30. Input nilai derivatif yang semakin besar
menyebabkan respons yang sangat cepat namun akan sangat peka sekali terhadap keberadaan
noise. Dari hasil pengamatan, PV tidak pernah stabil terhadap SP. Maka dari sekian variasi
waktu derivatif, tidak dapat ditentukan mana yang terbaik. Oleh karena itu, dapat
disimpulkan pada pengendalian aliran ini lebih baik menggunakan pengendali dengan
parameter Proporsional-Integral (PI).
Untuk percobaan menggunakan tangki peredam, dilakukan seperti tanpa peredam
hanya saja valve V3 dibuka keluaran valve dan V4, V5, dan V6 ditutup. Dari sini bisa
didapatkan fungsi peredaman. Fungsi redaman adalah untuk mengantisipasi adanya gangguan
sehingga dapat mengurangi adanya osilasi. Sehingga dari hasil pengamatan grafik,
pengendalian yang dapat dikatakan lebih baik adalah pangendalian dengan rendaman.
Adapun sifat pengendalian aliran ini yaitu direct acting, yaitu jika aliran udara tekan
menyebabkan tekanan dalam tangki melebihi SP maka dari itu control valve akan
memperbesar bukaannya.
IV KESIMPULAN
Adapun kesimpulan yang didapat dari hasil percobaan pengendalian tekanan ini
adalah:
1. Berdasarkan hasil grafik pada percobaan:
pengendali yang dapat dikatakan paling baik pada pengendalian tekanan ini adalah
pengendali Proporsional-Integral (PI) atau PI-Controller.
Pengendalian dengan tangki peredam lebih baik daripada tanpa peredam, dapat dilihat
dari osilasi yang minimum pada grafik.
Nilai PB terbaik adalah 50% dan nilai waktu integral (Ti) terbaik adalah 0.5.
2. Pengaruh keberadaan Proportional Band (PB) adalah semakin besar PB, respons akan
semakin lambat, stabilitas semakin tinggi.
3. Pengaruh keberadaan integral time atau waktu integral (Ti) adalah semakin kecil waktu
integral, maka respons akan semakin cepat tetapi kestabilan rendah.
4. Pengaruh keberadaan derivative time atau waktu derivative (Td) adalah semakin besar
waktu derivatif, maka respons akan semakin cepat tetapi akan sangat peka terhadap noise.
DAFTAR PUSTAKA
Heriyanto. Pengendalian Proses. Jurusan Teknik Kimia, 2007. Bandung: Politeknik Negeri Bandung
Wade, H. L. 2004. Basic and Adavanced Regulatory Control: System Design and Application. Ed. 2, ISA, NC