endali robot ik widianto robot obot eldidik.blog.undip.ac.id/files/2012/09/tkc225-2012... · endali...
TRANSCRIPT
Sistem KendaliRobot
@2012,Eko DidikWidianto
Sistem KontrolRobot
Sistem KontrolHigh-LevelSistem Kendali Robot
TKC306 - Robotika
Eko Didik Widianto
Sistem Komputer - Universitas Diponegoro
Sistem KendaliRobot
@2012,Eko DidikWidianto
Sistem KontrolRobot
Sistem KontrolHigh-Level
Review Kuliah
� Prinsip dasar dan mekanisme kontrol robot
� Implementasi kendali ke dalam rangkaian berbasismikroprosesor
� Low-level dan High-level Control pada robot
� Teknik kontrol On/Off
� Kontrol posisi, kecepatan dan akselerasi
� Teknik Proporsional (P), Integral (I), Derivatif (D) danKombinasi Ketiganya
Sistem KendaliRobot
@2012,Eko DidikWidianto
Sistem KontrolRobot
Sistem KontrolHigh-Level
Kompetensi Dasar
1. [C2] Mahasiswa dapat menjelaskan prinsip dasar mekanismekendali dalam robotika
2. [C3] Mahasiswa dapat menggunakan teknik kontrol On/Offsecara input dan output untuk kendali robot
3. [C3] Mahasiswa dapat menggunakan teknik kendali proporsional(P), kendali Integral (I), kendali Derivatif (D) dan kendali PIDuntuk kendali robot
Acknowledgement:
1. Christopher Batten, Maslab IAP Robotics Course,2005
� slide, gambar
Sistem KendaliRobot
@2012,Eko DidikWidianto
Sistem KontrolRobot
Sistem KontrolHigh-Level
Bahasan
Sistem Kontrol RobotSistem Kontrol RobotKontrol High-Level & Low-Level
Sistem Kontrol High-LevelFinite State Machine (FSM)Sistem Kontrol Loop TertutupImplementasi FSMContoh Kontrol FSMFSM Multi-Thread
Sistem KendaliRobot
@2012,Eko DidikWidianto
Sistem KontrolRobotSistem Kontrol Robot
Kontrol High-Level &
Low-Level
Sistem KontrolHigh-Level
Bahasan
Sistem Kontrol RobotSistem Kontrol RobotKontrol High-Level & Low-Level
Sistem Kontrol High-LevelFinite State Machine (FSM)Sistem Kontrol Loop TertutupImplementasi FSMContoh Kontrol FSMFSM Multi-Thread
Sistem KendaliRobot
@2012,Eko DidikWidianto
Sistem KontrolRobotSistem Kontrol Robot
Kontrol High-Level &
Low-Level
Sistem KontrolHigh-Level
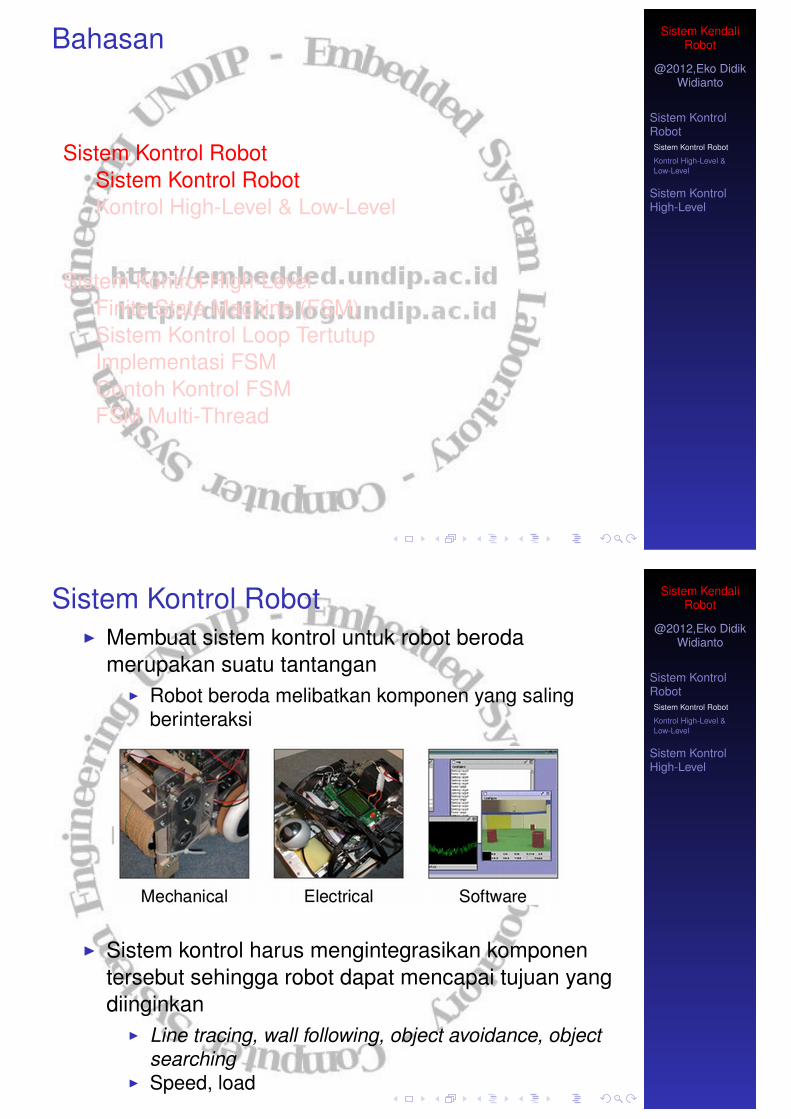
Sistem Kontrol Robot� Membuat sistem kontrol untuk robot berodamerupakan suatu tantangan
� Robot beroda melibatkan komponen yang salingberinteraksi
� Sistem kontrol harus mengintegrasikan komponentersebut sehingga robot dapat mencapai tujuan yangdiinginkan
� Line tracing, wall following, object avoidance, objectsearching
� Speed, load
Sistem KendaliRobot
@2012,Eko DidikWidianto
Sistem KontrolRobotSistem Kontrol Robot
Kontrol High-Level &
Low-Level
Sistem KontrolHigh-Level
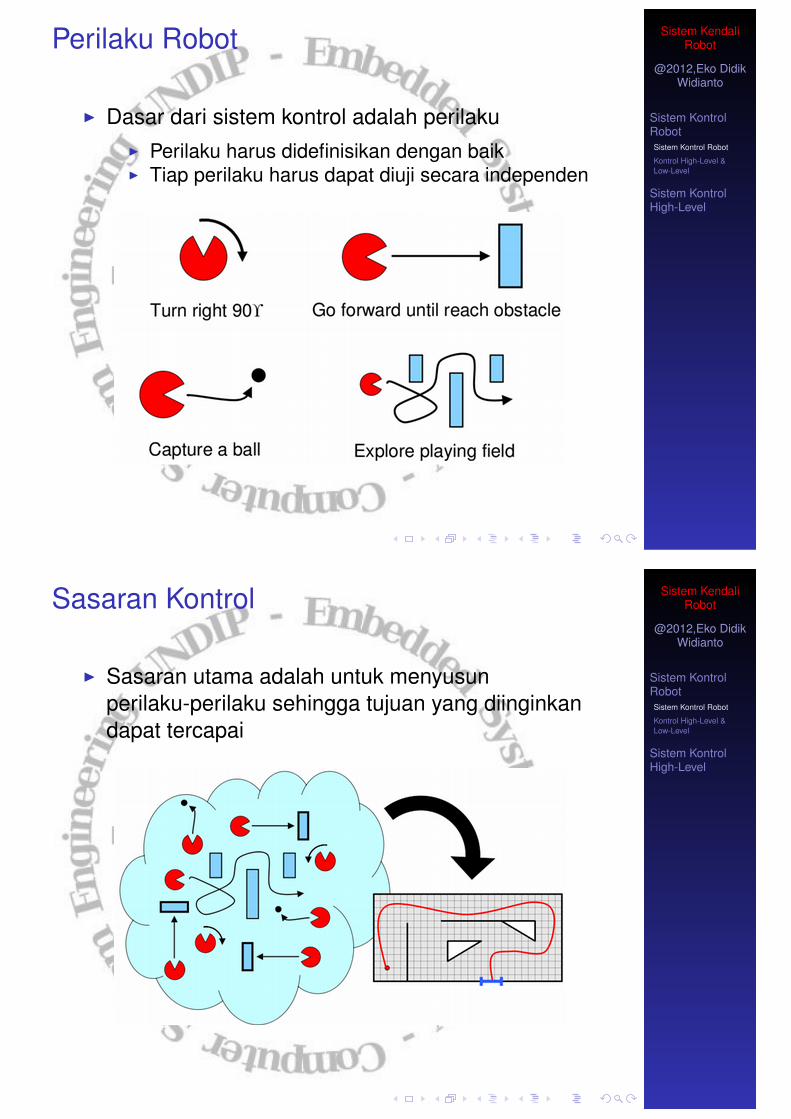
Perilaku Robot
� Dasar dari sistem kontrol adalah perilaku
� Perilaku harus didefinisikan dengan baik� Tiap perilaku harus dapat diuji secara independen
Sistem KendaliRobot
@2012,Eko DidikWidianto
Sistem KontrolRobotSistem Kontrol Robot
Kontrol High-Level &
Low-Level
Sistem KontrolHigh-Level
Sasaran Kontrol
� Sasaran utama adalah untuk menyusunperilaku-perilaku sehingga tujuan yang diinginkandapat tercapai
Sistem KendaliRobot
@2012,Eko DidikWidianto
Sistem KontrolRobotSistem Kontrol Robot
Kontrol High-Level &
Low-Level
Sistem KontrolHigh-Level
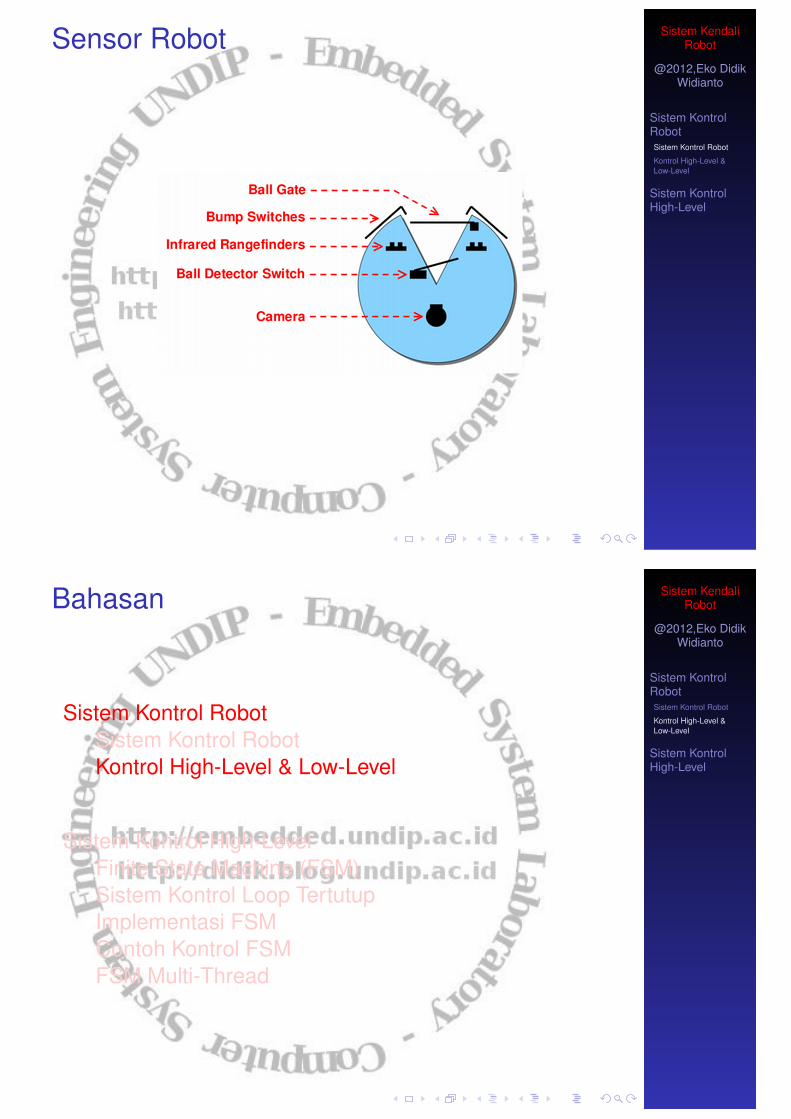
Sensor Robot
Sistem KendaliRobot
@2012,Eko DidikWidianto
Sistem KontrolRobotSistem Kontrol Robot
Kontrol High-Level &
Low-Level
Sistem KontrolHigh-Level
Bahasan
Sistem Kontrol RobotSistem Kontrol RobotKontrol High-Level & Low-Level
Sistem Kontrol High-LevelFinite State Machine (FSM)Sistem Kontrol Loop TertutupImplementasi FSMContoh Kontrol FSMFSM Multi-Thread
Sistem KendaliRobot
@2012,Eko DidikWidianto
Sistem KontrolRobotSistem Kontrol Robot
Kontrol High-Level &
Low-Level
Sistem KontrolHigh-Level
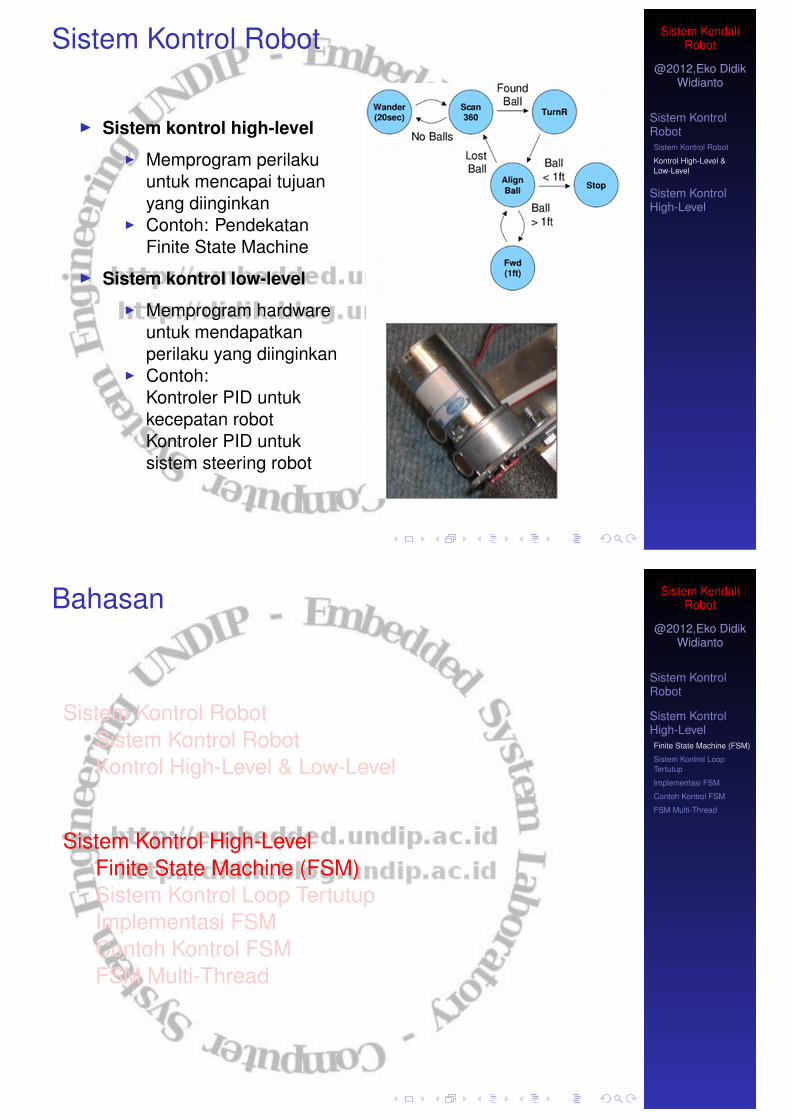
Sistem Kontrol Robot
� Sistem kontrol high-level
� Memprogram perilakuuntuk mencapai tujuanyang diinginkan
� Contoh: PendekatanFinite State Machine
� Sistem kontrol low-level
� Memprogram hardwareuntuk mendapatkanperilaku yang diinginkan
� Contoh:Kontroler PID untukkecepatan robotKontroler PID untuksistem steering robot
Sistem KendaliRobot
@2012,Eko DidikWidianto
Sistem KontrolRobot
Sistem KontrolHigh-LevelFinite State Machine (FSM)
Sistem Kontrol LoopTertutup
Implementasi FSM
Contoh Kontrol FSM
FSM Multi-Thread
Bahasan
Sistem Kontrol RobotSistem Kontrol RobotKontrol High-Level & Low-Level
Sistem Kontrol High-LevelFinite State Machine (FSM)Sistem Kontrol Loop TertutupImplementasi FSMContoh Kontrol FSMFSM Multi-Thread
Sistem KendaliRobot
@2012,Eko DidikWidianto
Sistem KontrolRobot
Sistem KontrolHigh-LevelFinite State Machine (FSM)
Sistem Kontrol LoopTertutup
Implementasi FSM
Contoh Kontrol FSM
FSM Multi-Thread
Pemodelan Perilaku
� Perilaku sebagai state (keadaan)
Sistem KendaliRobot
@2012,Eko DidikWidianto
Sistem KontrolRobot
Sistem KontrolHigh-LevelFinite State Machine (FSM)
Sistem Kontrol LoopTertutup
Implementasi FSM
Contoh Kontrol FSM
FSM Multi-Thread
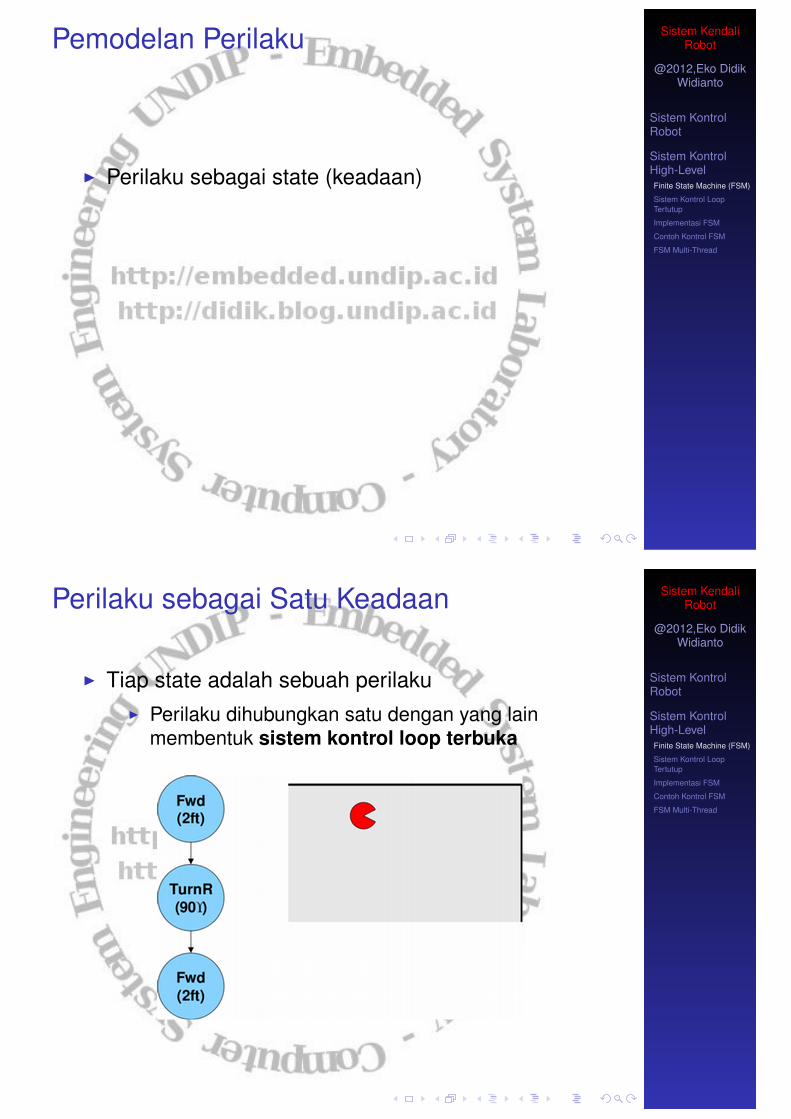
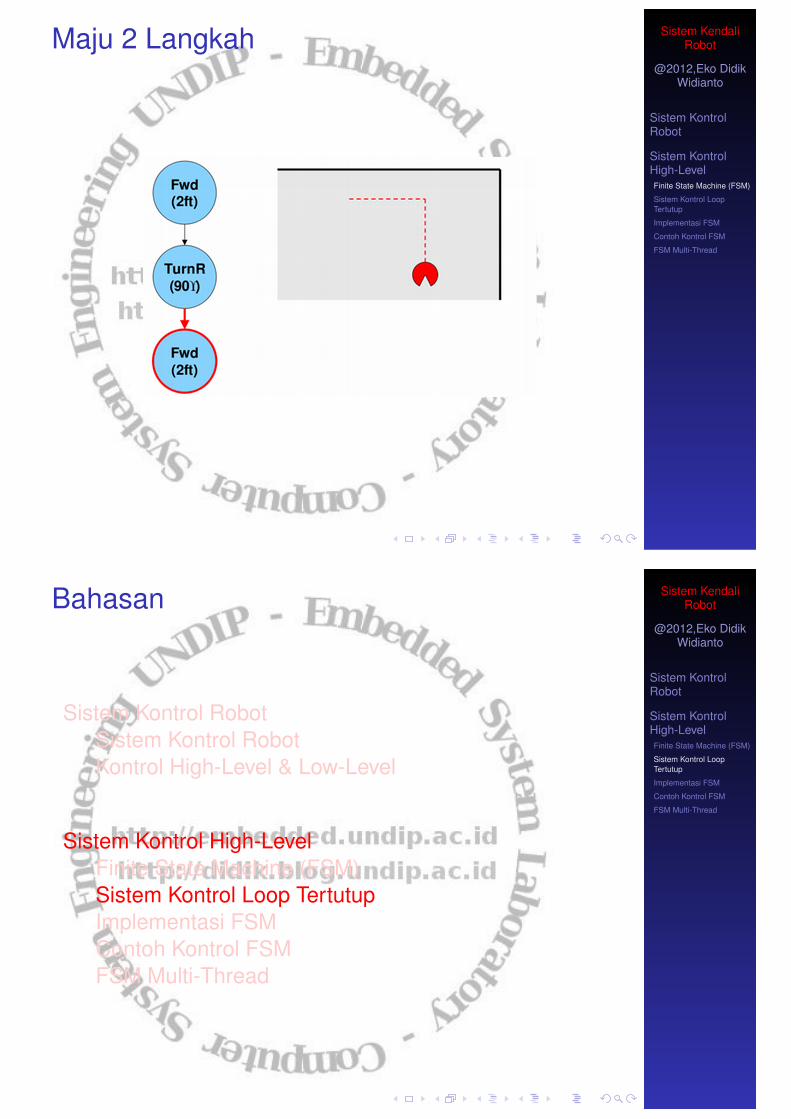
Perilaku sebagai Satu Keadaan
� Tiap state adalah sebuah perilaku
� Perilaku dihubungkan satu dengan yang lainmembentuk sistem kontrol loop terbuka
Sistem KendaliRobot
@2012,Eko DidikWidianto
Sistem KontrolRobot
Sistem KontrolHigh-LevelFinite State Machine (FSM)
Sistem Kontrol LoopTertutup
Implementasi FSM
Contoh Kontrol FSM
FSM Multi-Thread
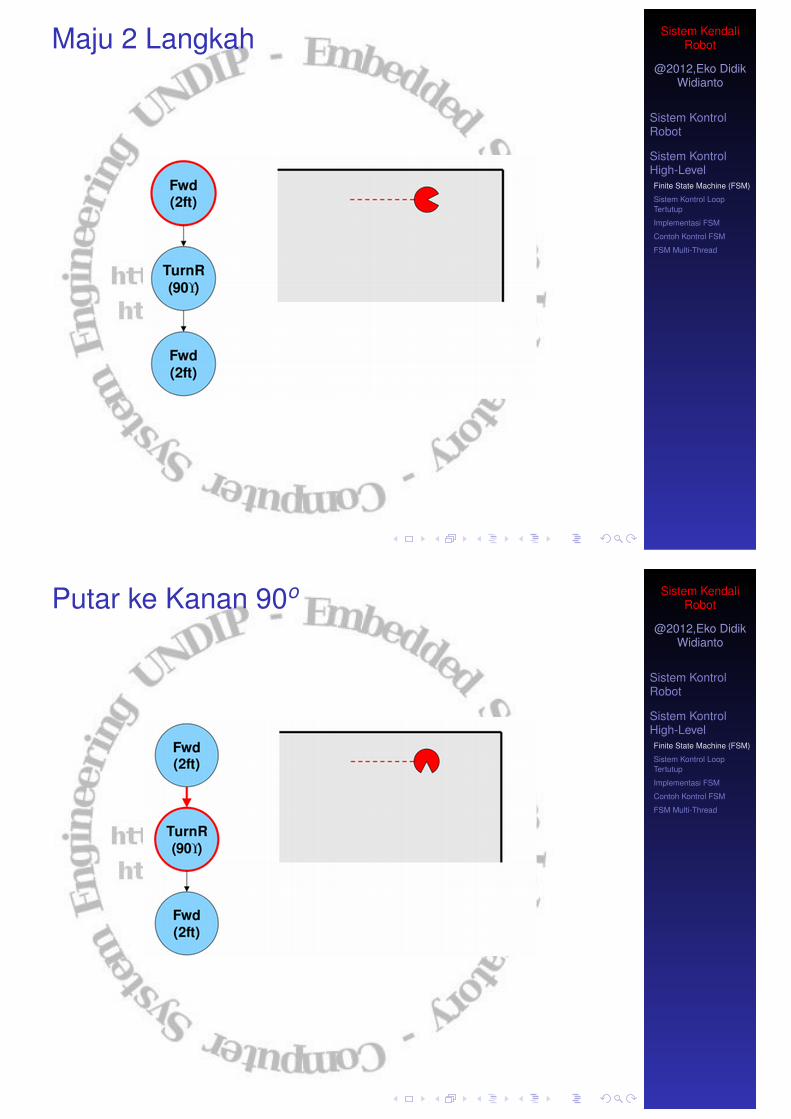
Maju 2 Langkah
Sistem KendaliRobot
@2012,Eko DidikWidianto
Sistem KontrolRobot
Sistem KontrolHigh-LevelFinite State Machine (FSM)
Sistem Kontrol LoopTertutup
Implementasi FSM
Contoh Kontrol FSM
FSM Multi-Thread
Putar ke Kanan 90o
Sistem KendaliRobot
@2012,Eko DidikWidianto
Sistem KontrolRobot
Sistem KontrolHigh-LevelFinite State Machine (FSM)
Sistem Kontrol LoopTertutup
Implementasi FSM
Contoh Kontrol FSM
FSM Multi-Thread
Maju 2 Langkah
Sistem KendaliRobot
@2012,Eko DidikWidianto
Sistem KontrolRobot
Sistem KontrolHigh-LevelFinite State Machine (FSM)
Sistem Kontrol LoopTertutup
Implementasi FSM
Contoh Kontrol FSM
FSM Multi-Thread
Bahasan
Sistem Kontrol RobotSistem Kontrol RobotKontrol High-Level & Low-Level
Sistem Kontrol High-LevelFinite State Machine (FSM)Sistem Kontrol Loop TertutupImplementasi FSMContoh Kontrol FSMFSM Multi-Thread
Sistem KendaliRobot
@2012,Eko DidikWidianto
Sistem KontrolRobot
Sistem KontrolHigh-LevelFinite State Machine (FSM)
Sistem Kontrol LoopTertutup
Implementasi FSM
Contoh Kontrol FSM
FSM Multi-Thread
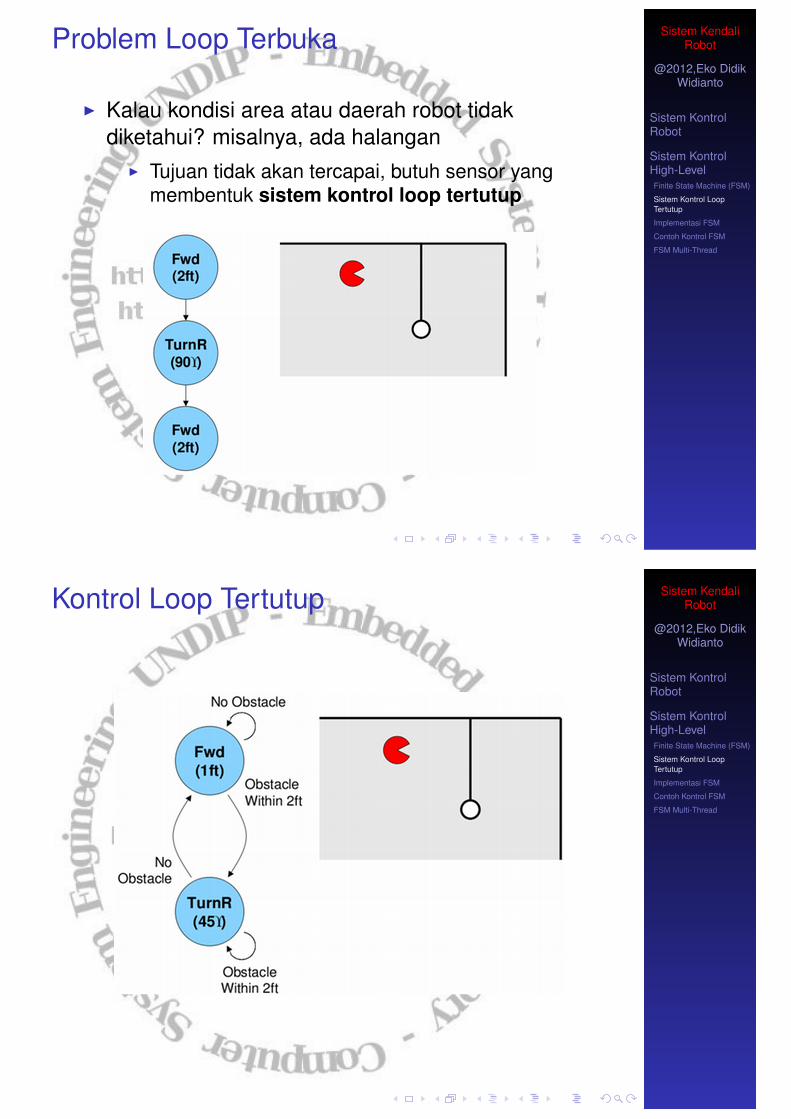
Problem Loop Terbuka
� Kalau kondisi area atau daerah robot tidakdiketahui? misalnya, ada halangan
� Tujuan tidak akan tercapai, butuh sensor yangmembentuk sistem kontrol loop tertutup
Sistem KendaliRobot
@2012,Eko DidikWidianto
Sistem KontrolRobot
Sistem KontrolHigh-LevelFinite State Machine (FSM)
Sistem Kontrol LoopTertutup
Implementasi FSM
Contoh Kontrol FSM
FSM Multi-Thread
Kontrol Loop Tertutup
Sistem KendaliRobot
@2012,Eko DidikWidianto
Sistem KontrolRobot
Sistem KontrolHigh-LevelFinite State Machine (FSM)
Sistem Kontrol LoopTertutup
Implementasi FSM
Contoh Kontrol FSM
FSM Multi-Thread
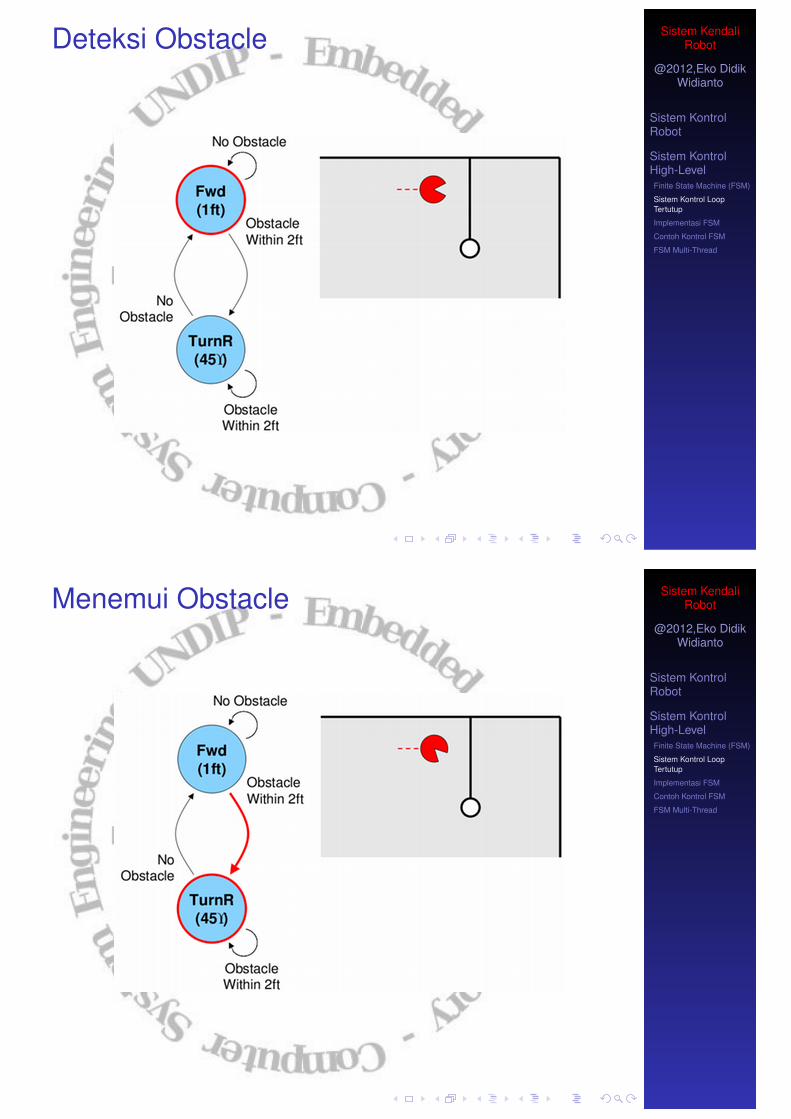
Deteksi Obstacle
Sistem KendaliRobot
@2012,Eko DidikWidianto
Sistem KontrolRobot
Sistem KontrolHigh-LevelFinite State Machine (FSM)
Sistem Kontrol LoopTertutup
Implementasi FSM
Contoh Kontrol FSM
FSM Multi-Thread
Menemui Obstacle
Sistem KendaliRobot
@2012,Eko DidikWidianto
Sistem KontrolRobot
Sistem KontrolHigh-LevelFinite State Machine (FSM)
Sistem Kontrol LoopTertutup
Implementasi FSM
Contoh Kontrol FSM
FSM Multi-Thread
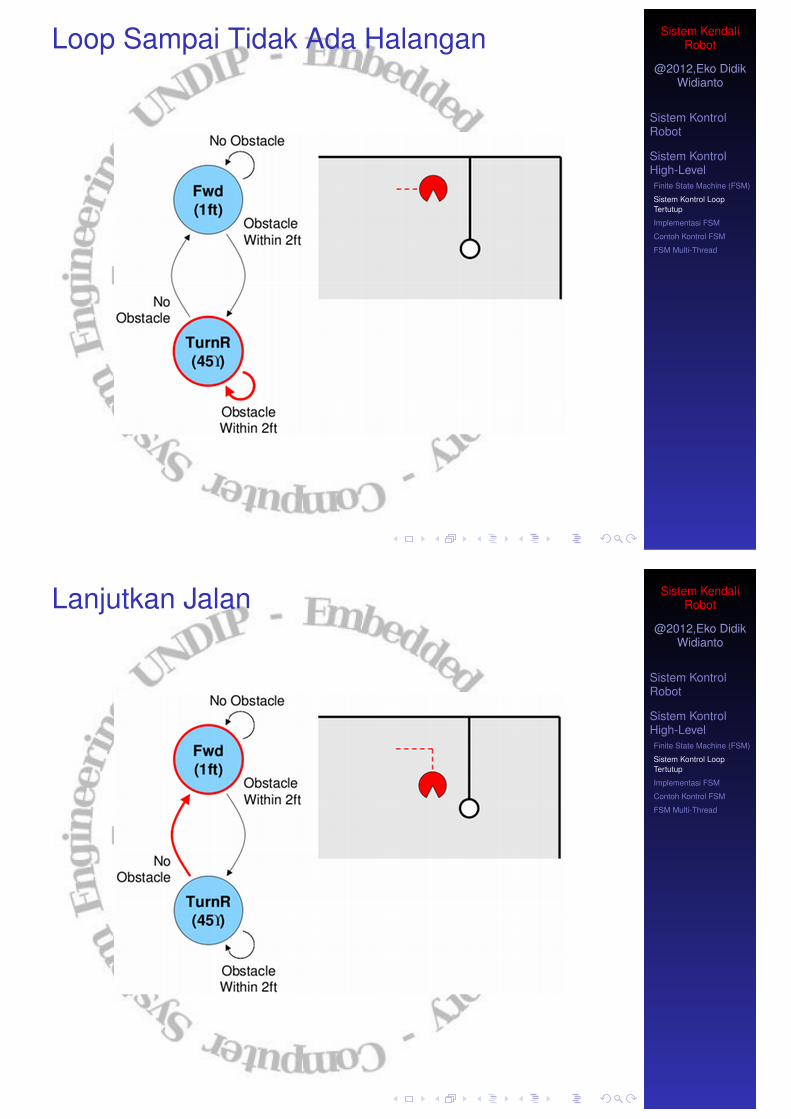
Loop Sampai Tidak Ada Halangan
Sistem KendaliRobot
@2012,Eko DidikWidianto
Sistem KontrolRobot
Sistem KontrolHigh-LevelFinite State Machine (FSM)
Sistem Kontrol LoopTertutup
Implementasi FSM
Contoh Kontrol FSM
FSM Multi-Thread
Lanjutkan Jalan
Sistem KendaliRobot
@2012,Eko DidikWidianto
Sistem KontrolRobot
Sistem KontrolHigh-LevelFinite State Machine (FSM)
Sistem Kontrol LoopTertutup
Implementasi FSM
Contoh Kontrol FSM
FSM Multi-Thread
Bahasan
Sistem Kontrol RobotSistem Kontrol RobotKontrol High-Level & Low-Level
Sistem Kontrol High-LevelFinite State Machine (FSM)Sistem Kontrol Loop TertutupImplementasi FSMContoh Kontrol FSMFSM Multi-Thread
Sistem KendaliRobot
@2012,Eko DidikWidianto
Sistem KontrolRobot
Sistem KontrolHigh-LevelFinite State Machine (FSM)
Sistem Kontrol LoopTertutup
Implementasi FSM
Contoh Kontrol FSM
FSM Multi-Thread
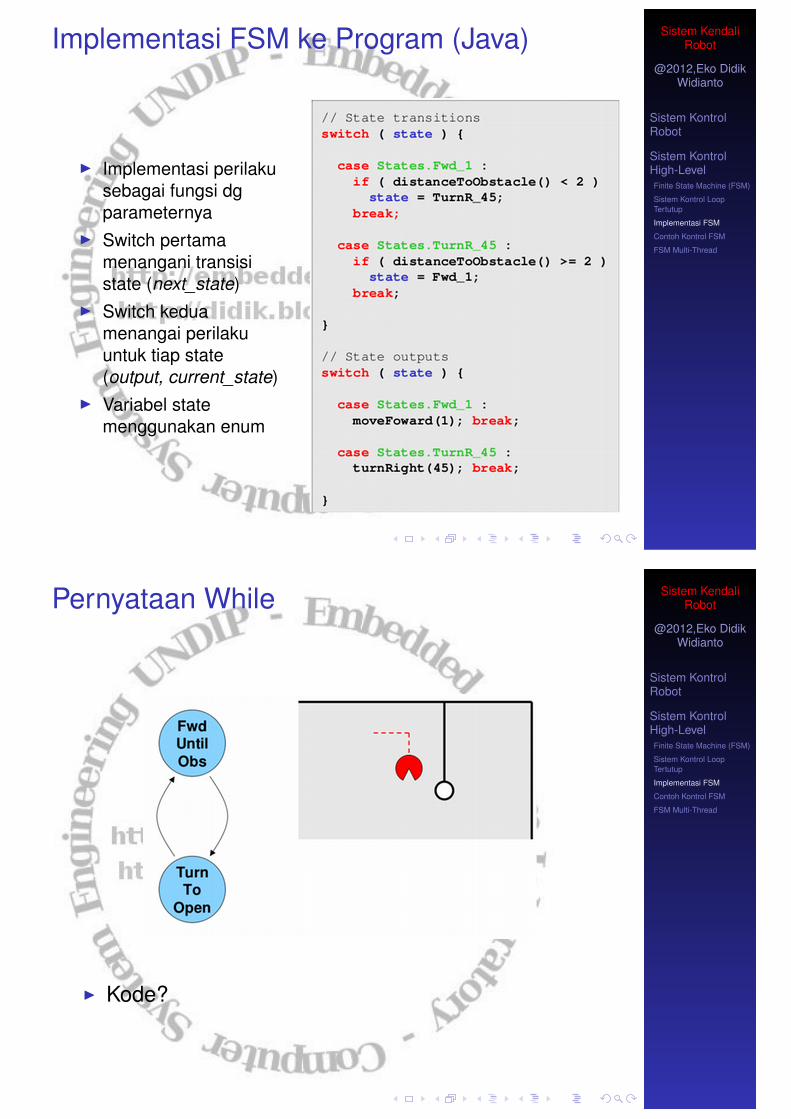
Implementasi FSM ke Program
Sistem KendaliRobot
@2012,Eko DidikWidianto
Sistem KontrolRobot
Sistem KontrolHigh-LevelFinite State Machine (FSM)
Sistem Kontrol LoopTertutup
Implementasi FSM
Contoh Kontrol FSM
FSM Multi-Thread
Implementasi FSM ke Program (Java)
� Implementasi perilakusebagai fungsi dgparameternya
� Switch pertamamenangani transisistate (next_state)
� Switch keduamenangai perilakuuntuk tiap state(output, current_state)
� Variabel statemenggunakan enum
Sistem KendaliRobot
@2012,Eko DidikWidianto
Sistem KontrolRobot
Sistem KontrolHigh-LevelFinite State Machine (FSM)
Sistem Kontrol LoopTertutup
Implementasi FSM
Contoh Kontrol FSM
FSM Multi-Thread
Pernyataan While
� Kode?
Sistem KendaliRobot
@2012,Eko DidikWidianto
Sistem KontrolRobot
Sistem KontrolHigh-LevelFinite State Machine (FSM)
Sistem Kontrol LoopTertutup
Implementasi FSM
Contoh Kontrol FSM
FSM Multi-Thread
Bahasan
Sistem Kontrol RobotSistem Kontrol RobotKontrol High-Level & Low-Level
Sistem Kontrol High-LevelFinite State Machine (FSM)Sistem Kontrol Loop TertutupImplementasi FSMContoh Kontrol FSMFSM Multi-Thread
Sistem KendaliRobot
@2012,Eko DidikWidianto
Sistem KontrolRobot
Sistem KontrolHigh-LevelFinite State Machine (FSM)
Sistem Kontrol LoopTertutup
Implementasi FSM
Contoh Kontrol FSM
FSM Multi-Thread
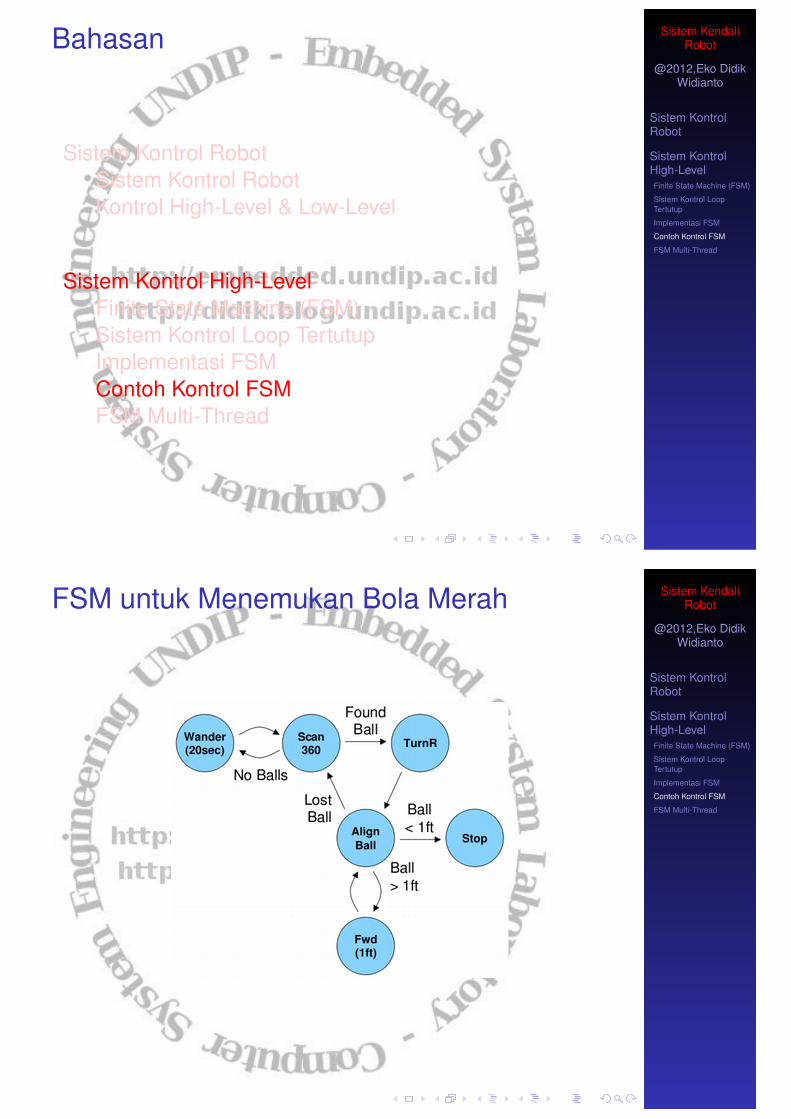
FSM untuk Menemukan Bola Merah
Sistem KendaliRobot
@2012,Eko DidikWidianto
Sistem KontrolRobot
Sistem KontrolHigh-LevelFinite State Machine (FSM)
Sistem Kontrol LoopTertutup
Implementasi FSM
Contoh Kontrol FSM
FSM Multi-Thread
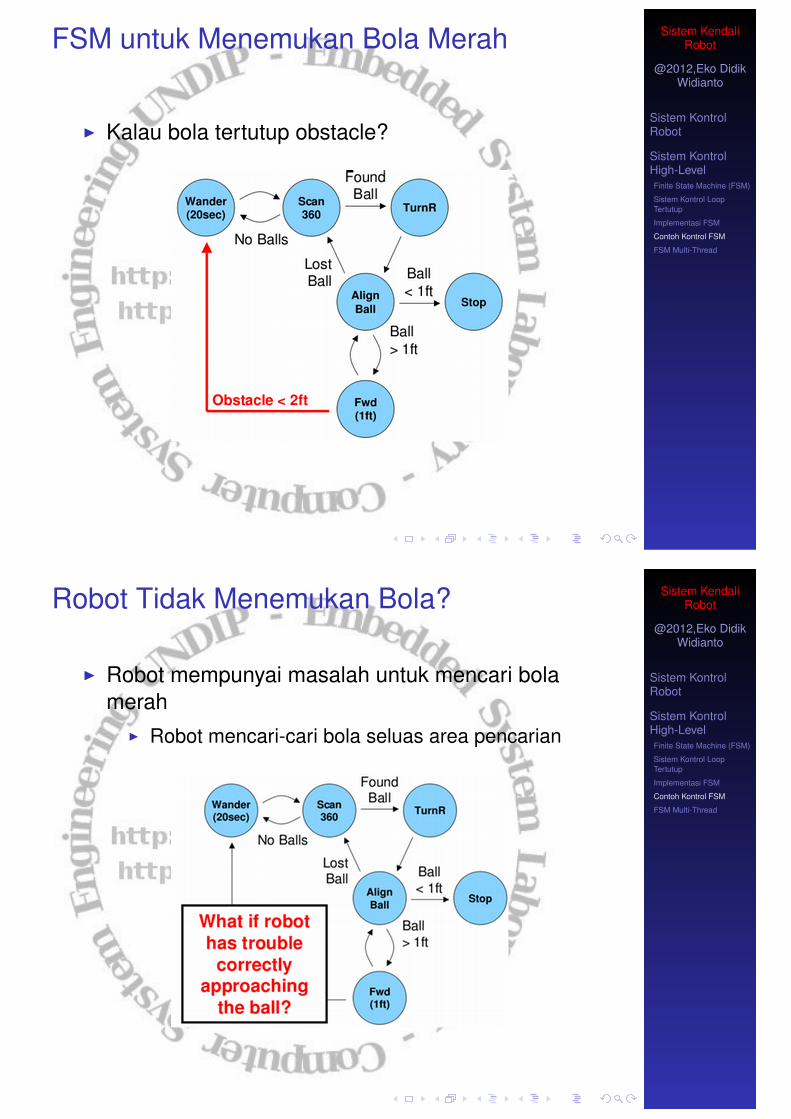
FSM untuk Menemukan Bola Merah
� Kalau bola tertutup obstacle?
Sistem KendaliRobot
@2012,Eko DidikWidianto
Sistem KontrolRobot
Sistem KontrolHigh-LevelFinite State Machine (FSM)
Sistem Kontrol LoopTertutup
Implementasi FSM
Contoh Kontrol FSM
FSM Multi-Thread
Robot Tidak Menemukan Bola?
� Robot mempunyai masalah untuk mencari bolamerah
� Robot mencari-cari bola seluas area pencarian
Sistem KendaliRobot
@2012,Eko DidikWidianto
Sistem KontrolRobot
Sistem KontrolHigh-LevelFinite State Machine (FSM)
Sistem Kontrol LoopTertutup
Implementasi FSM
Contoh Kontrol FSM
FSM Multi-Thread
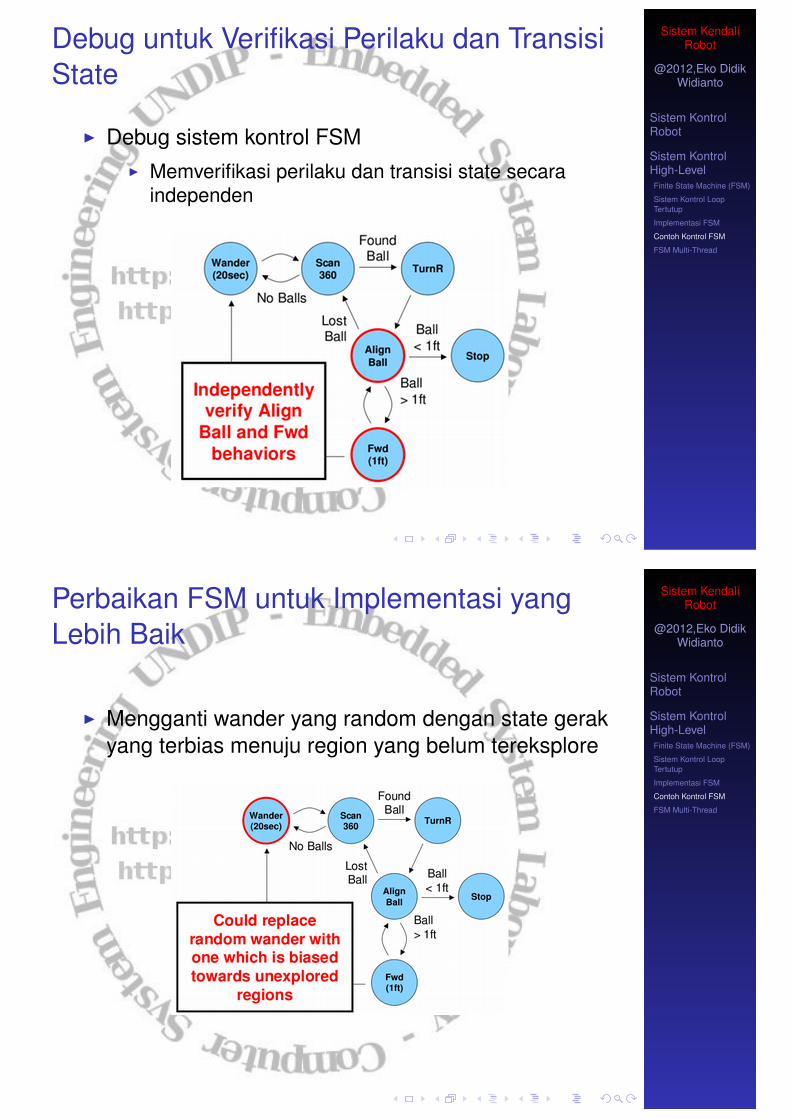
Debug untuk Verifikasi Perilaku dan Transisi
State
� Debug sistem kontrol FSM
� Memverifikasi perilaku dan transisi state secaraindependen
Sistem KendaliRobot
@2012,Eko DidikWidianto
Sistem KontrolRobot
Sistem KontrolHigh-LevelFinite State Machine (FSM)
Sistem Kontrol LoopTertutup
Implementasi FSM
Contoh Kontrol FSM
FSM Multi-Thread
Perbaikan FSM untuk Implementasi yang
Lebih Baik
� Mengganti wander yang random dengan state gerakyang terbias menuju region yang belum tereksplore
Sistem KendaliRobot
@2012,Eko DidikWidianto
Sistem KontrolRobot
Sistem KontrolHigh-LevelFinite State Machine (FSM)
Sistem Kontrol LoopTertutup
Implementasi FSM
Contoh Kontrol FSM
FSM Multi-Thread
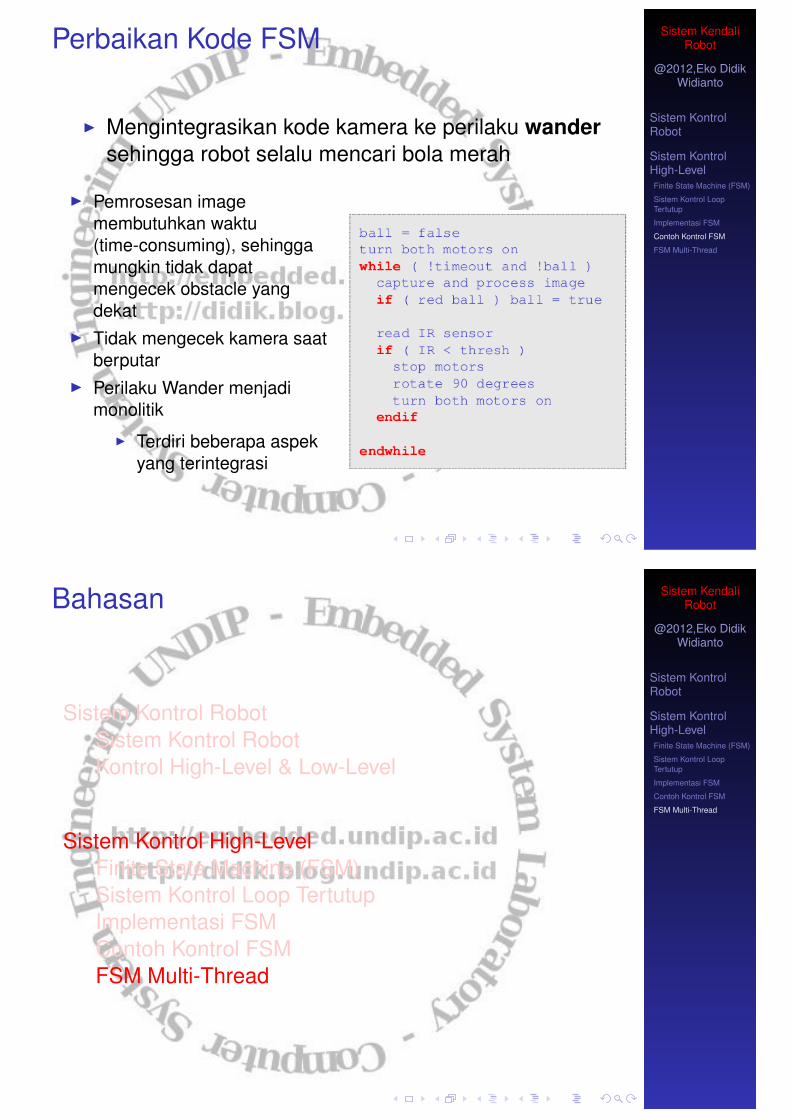
Perbaikan Kode FSM
� Mengintegrasikan kode kamera ke perilaku wandersehingga robot selalu mencari bola merah
� Pemrosesan imagemembutuhkan waktu(time-consuming), sehinggamungkin tidak dapatmengecek obstacle yangdekat
� Tidak mengecek kamera saatberputar
� Perilaku Wander menjadimonolitik
� Terdiri beberapa aspekyang terintegrasi
Sistem KendaliRobot
@2012,Eko DidikWidianto
Sistem KontrolRobot
Sistem KontrolHigh-LevelFinite State Machine (FSM)
Sistem Kontrol LoopTertutup
Implementasi FSM
Contoh Kontrol FSM
FSM Multi-Thread
Bahasan
Sistem Kontrol RobotSistem Kontrol RobotKontrol High-Level & Low-Level
Sistem Kontrol High-LevelFinite State Machine (FSM)Sistem Kontrol Loop TertutupImplementasi FSMContoh Kontrol FSMFSM Multi-Thread
Sistem KendaliRobot
@2012,Eko DidikWidianto
Sistem KontrolRobot
Sistem KontrolHigh-LevelFinite State Machine (FSM)
Sistem Kontrol LoopTertutup
Implementasi FSM
Contoh Kontrol FSM
FSM Multi-Thread
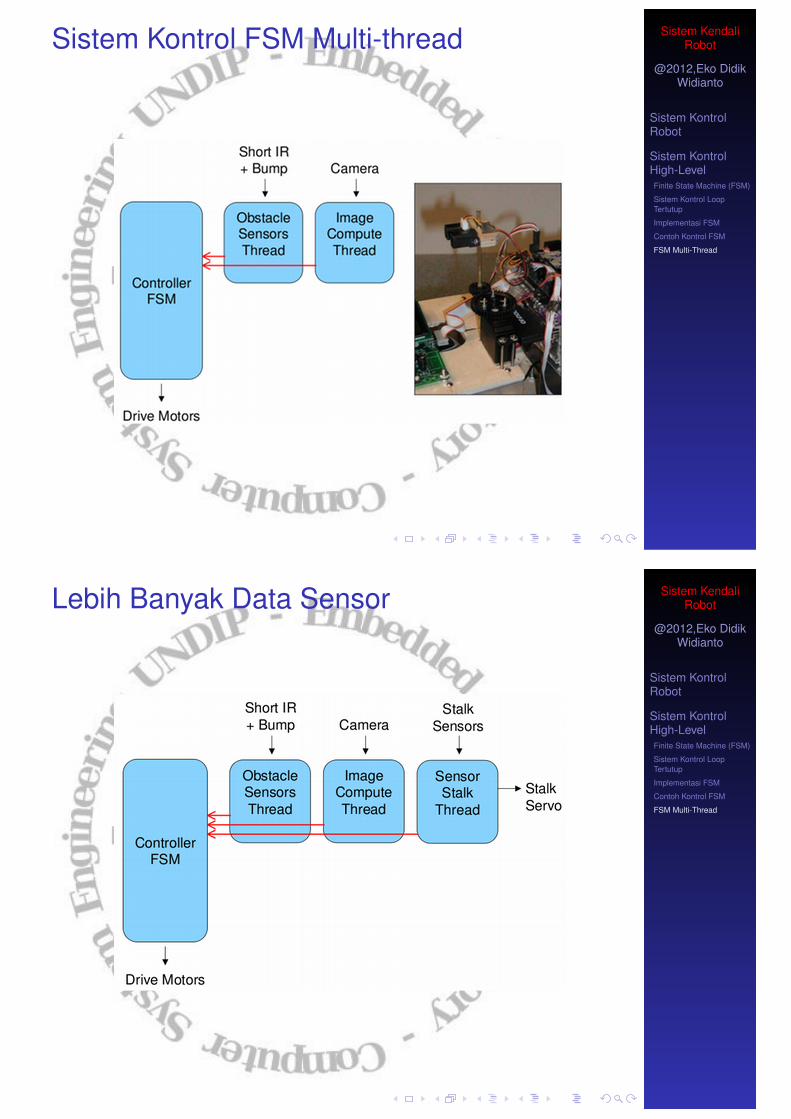
Sistem Kontrol FSM Multi-thread
Sistem KendaliRobot
@2012,Eko DidikWidianto
Sistem KontrolRobot
Sistem KontrolHigh-LevelFinite State Machine (FSM)
Sistem Kontrol LoopTertutup
Implementasi FSM
Contoh Kontrol FSM
FSM Multi-Thread
Lebih Banyak Data Sensor
Sistem KendaliRobot
@2012,Eko DidikWidianto
Sistem KontrolRobot
Sistem KontrolHigh-LevelFinite State Machine (FSM)
Sistem Kontrol LoopTertutup
Implementasi FSM
Contoh Kontrol FSM
FSM Multi-Thread
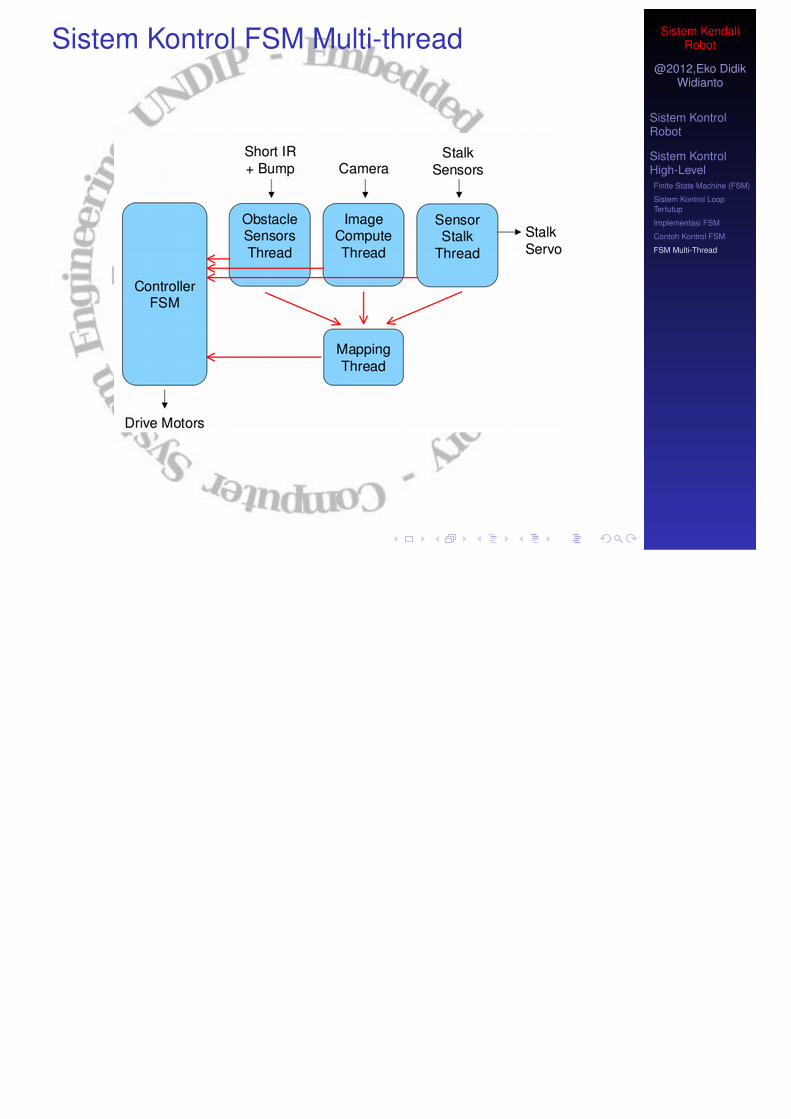
Sistem Kontrol FSM Multi-thread