dpt dinamika proses tangki
DESCRIPTION
tentang dinamika prosesTRANSCRIPT
Panduan Pelaksanaan Laboratorium Instruksional I/II
Departemen Teknik Kimia ITB
-1/39-
MODUL 1.12 Dinamika Proses
I. Pendahuluan
Pabrik kimia merupakan susunan/rangkaian berbagai unit pengolahan yang
terintegrasi satu sama lain secara sistematik dan rasional. Tujuan pengoperasian pabrik
secara keseluruhan adalah mengubah (mengonversi) bahan baku menjadi produk yang
lebih bernilai guna. Dalam pengoperasiannya pabrik akan selalu mengalami gangguan
(disturbance) dari lingkungan eksternal. Selama beroperasi, pabrik harus terus
memepertimbangkan aspek keteknikan, keekonomisan, dan kondisi sosial agar tidak
terlalu signifikan terpengaruh oleh perubahan-perubahan eksternal tersebut.
Dinamika proses menunjukkan unjuk kerja proses yang profilnya selalu berubah
terhadap waktu. Dinamika proses selalu terjadi selama sistem proses belum mencapai
kondisi tunak. Keadaan tidak tunak terjadi karena adanya gangguan terhadap kondisi
proses yang tunak.
Dalam penelitian dan praktik industri, pemahaman mengenai dinamika suatu
proses kimia telah berkembang dan terbentuk karena faktor-faktor berikut:
1. Struktur proses kimiawi menjadi sangat kompleks, yang menuntut perhatian
profesi keteknikan untuk mengkaji/ merancang pengendalian proses keseluruhan
pabrik dari pada per satu unit operasi. Perancangan sistem instrumentasi menjadi
bagian yang tidak terpisahkan dari perancangan proses kimia itu sendiri
2. Perancangan instruimentasi sistem proses yang dituntut untuk memenuhi:
- tujuan dan sasaran sistem kontrol
- pemilihan cara pengukuran, manipulasi serta rangkaian yang tepat
- identifikasi sistem komputerisasi dan instrumentasi yang tepat
3. Pertumbuhan komputer digital yang sangata cepat sehingga dapat merombak
praktik instrumentasi proses kimia dan telah menerapkan sistem instrumentasi
yang modern
Agar proses selalu stabil, karakteristik dinamika sistem proses dan sistem
pemroses harus diidentifikasi. Jika dinamika peralatan dan perlengkapan operasi sudah

Panduan Pelaksanaan Laboratorium Instruksional I/II
Departemen Teknik Kimia ITB
Modul 1.12 Dinamika Proses Halaman 2 dari 39
dipahami akan mudah dilakukan pengendalian, pencegahan kerusakan, dan pemonitoran
tempat terjadi kerusakan apabila unjuk kerja perlatan berkurang dan peralatan bekerja
tidak sesuai dengan spesifikasi operasinya. Monitoring, prefention, dan control
dibutuhkan untuk:
1. menjaga keamanan dan keselamatan kerja
Keamanan dalam operasi suatu pabrik kimia merupakan kebutuhan primer untuk
orang-orang yang bekerja di pabrik tersebut dan bagi kelangsungan perusahaan.
Untuk menjaga terjaminnya keamanan tersebut, berbagai kondisi operasi pabrik
seperti tekanan operasi, temperatur, konsentrasi bahan kimia, dan lain sebagainya
harus dijaga tetap pada batas-batas tertentu yang diizinkan
2. memenuhi spesifikasi produk yang diinginkan
Pabrik harus menghasilkan produk dengan jumlah tertentu (sesuai kapasitas desain)
dan dengan kualitas tertentu yang diinginkan. Untuk itu dibutuhkan suatu sistem
pengendali untuk menjaga tingkat produksi dan kualitas produk yang diinginkan.
3. menjaga peralatan proses dapat berfungsi sesuai yang diinginkan dalam desain
Peralatan-peralatan yang digunakan dalam operasi proses produksi memiliki
kendala-kendala operasional tertentu yang harus dipenuhi. Pada pompa harus
dipertahankan NPSH, pada kolom distilasi harus dijaga agar tidak floding,
temperatur dan tekanan pada reaktor harus dijaga agar tetap beroperasi aman dan
konversi menjadi produk optimal, isi tangki tidak boleh luber ataupun kering, serta
masih banyak kendala-kendala lain yang harus diperhatikan.
4. menjaga agar operasi pabrik tetap ekonomis
Operasi pabrik bertujuan menghasilkan produk dari bahan baku yang memberi
keuntungan maksimum, sehingga pabrik harus dijalankan pada kondisi yang
menyebabkan biaya operasi menjadi minimum dan laba yang diperoleh menjadi
maksimum.
5. memenuhi persyaratan lingkungan
Operasi pabrik harus memenuhi berbagai peraturan lingkungan yang memberikan
syarat-syarat tertentu bagi berbagai buangan pabrik kimia.
Percobaan ini dilakukan dengan memberi simulasi gangguan pada sistem tangki
yang telah tunak. Suatu tangki yang diatur dengan valve keluaran akan mempunyai debit
keluaran yang berubah-ubah, bergantung pada bukaan valve. Parameter yang
menentukan debit ini adalah k dan n. Harga k dan n yang spesifik untuk tiap bukaan
Panduan Pelaksanaan Laboratorium Instruksional I/II
Departemen Teknik Kimia ITB
Modul 1.12 Dinamika Proses Halaman 3 dari 39
valve digunakan untuk mengevaluasi profil ketinggian dalam tangki setelah suatu
simulasi gangguan dilakukan. Kondisi yang harus dipenuhi adalah sistem harus tunak
pada saat sebelum dan sesudah gangguan diberikan. Pada pengujian ini dilakukan 4
variasi bukaan valve.
Percabaan yang kedua adalah pengujikan karakteristik termometer. Karakteristik
pengukuran termperatur pada termometer diuji dengan dan tanpa termowel. Termometer
yang digunakan adalah termometer alkohol dan termometer raksa. Pada pengujian ini
dilakukan 4 variasi termowel. Pengujian dinamika pengukuran temperatur dilakukan
pada kondisi pengukuran dari temperatur tinggi ke temperatur rendah dan pengukuran
dari temperatur rendah ke temperatur tinggi. Karakteristik proses yang diuji adalah
konstanta waktu (τ) termometer dan evaluasi profil temperatur T terhadap waktu t
dengan nilai konstanta τ tersebut.
II. Tujuan
Dengan melaksanakan praktikum ini praktikan diharapkan mempelajari
dinamika (perilaku) proses tidak tunak (unsteady state) lewat sistem fisik sederhana.
III. Sasaran
Sasaran percobaan ini adalah:
1. Praktikan mampu mengenali dan mendefinisikan keadaan tunak dan tidak tunak
untuk sistem-sistem fisik sederhana.
2. Praktikan mampu membangun model metematika untuk sistem-sistem fisik
sederhana yang berada dalam keadaan tidak tunak.
3. Praktikan dapat menentukan parameter-parameter model matematika di atas dari
rangkaian data percobaan, seeprti tanggapan sistem terhadap gangguan fungsi
tangga.
Panduan Pelaksanaan Laboratorium Instruksional I/II
Departemen Teknik Kimia ITB
Modul 1.12 Dinamika Proses Halaman 4 dari 39
IV. Tinjauan Pustaka
Variabel-variabel yang terlibat dalam proses operasi pabrik adalah F (laju alir),
T (temperatur), P (tekanan) dan C (konsentrasi). Variabel-variabel tersebut dalat
dikategorikan menjadi 2 kelompok, yaitu variabel input dan variabel output.
1. Variabel Input
Variabel input adalah variabel yang menandai efek lingkungan pada proses kimia
yang dituju. Variabel ini juga diklasifikasikan dalam 2 kategori, yaitu:
1. manipulated (adjustable) variable, jika harga variabel tersebut dapat diatur
dengan bebas oleh operator atau mekanisme pengendalian
2. disturbance variable, jika harga tidak dapat diatur oleh operator atau sistem
pengendali, tetapi merupakan gangguan.
2. Variabel Output
Variabel oiutput adalah variabel yang menandakan efek proses kimia terhadap
lingkungan yang diklasifikasikan dalam 2 kelompok:
1. measured output variables, jika variabel dapat diketahui dengan pengukuran
langsung
2. unmeasured output variables, jika variabel tidak dapat diketahui dengan
pengukuran langsung
Beberapa pengukuran variabel harus dilakukan agar kinerja operasi pabrik dapat
dimonitor. Terdapat beberapa jenis pengukuran variabel yang dapat diterapkan untuk
pengendalian proses:
1. Primary Measurement
Bila memungkinkan sebaiknya pada pengendalian proses harga variabel yang
menjadi objective pengendalian harus diukur/dimonitor. Cara pengukuran variabel
proses yang menjadi control objective pengendalian secara langsung disebut primary
measurement.
Sebagai contoh pada sistem mixer tangki berpengaduk control objective adalah
mempertahankan T dan h cairan dalam tangki pada harga T=Tsp dan h =hsp. Karena
itu, usaha pertama yang harus dilakukan adalah memasang alat pengukur untuk
dapat mengamati nilai T dan h cairan dalam tangki secara langsung, yaitu dengan

Panduan Pelaksanaan Laboratorium Instruksional I/II
Departemen Teknik Kimia ITB
Modul 1.12 Dinamika Proses Halaman 5 dari 39
denggunakan termokopel untuk pengukuran T dan differential pressure cell untuk
mengukur h.
2. Secaondary measurement
Pada kasus-kasus tertentu, variabel yang merupakan control objective tidak
dapat diukur secara langsung (unmeasured output). Pada kasus-kasus dengan control
objective yang tidak dapat diukur langsung tersebut, harus diukur variabel lain yang
tergolong measured variable dan dapat dikorelasikan melalui suatu hubungan
matematika tertentu dengan unmeasured output yang ingin dikendalikan.
Sebagai contoh pada kolom distilasi yang memisahkan formaldehid dari
kompoenen lain, control objective adalah menjaga agar aliaran destilat produk tetap
mengandung 95% formaldehid meskipun komposisi umpan berubah-ubah. Control
objective pada sistem distilasi ini berupa komposisi formaldehid dapat diukur
langsung menggunakan composition analyzer. Data komposisi yang didapatkan
kemudian digunakan sebagai input bagi pengendali umpan balik yang memanipulasi
refluks ratio sehingga komposisi formaldehid dalam distilat dapat dipertahankan
tidak kurang dari 95%. Alternatif cara pengendalian yang alain adalah mengukur
komposisi formaldehid dalam laju alir masuk, kemudian menggunakan data
komposisi formaldehid tersebut dilakukan pengendalian feed forward dengan
memanipulasi reflux ratio. Kedua alternatif pengendalian tersebut bergantung pada
penggunaan composition analyzer. Pada kasus di mana alat tersebut terlalu mahal
atau tingkat keakuratan dan keterandalannya terlalu rendah untuk digunakan dalam
industri, dapat dilakukan secondary measurement dengan mengukur temperatur
cairan pada beberapa tray sepanjang kolom menggunakan termokopel. Dari hasil
pengukuran temperatur tersebut dengan metoda neraca massa dan neraca energi serta
hubungan kesetimbangan termmodinamika uap-cair dapat dikembangkan suatu
hubungan matematis untuk menghitung komposisi formaldehid tersebut. Hal ini
lebih ekonomis karena harga composition analyzer jauh lebih mahal daripada
termokopel dan sebaliknya pengoperasian termokopel untuk mendapatkan tingkat
keakuratan yang baik jauh lebih mudah daripada penggunaan composition analyzer.
3. Pengukuran external disturbance
Pengukuran disturbance sebelum variabel tersebut masuk ke dalam proses dapat
sangat menguntungkan, karena hasil pengukuran tersebut dapat memberikan
informasi mengenai kelakuan proses yang akan terjadi. Informasi tersebut dapat
Panduan Pelaksanaan Laboratorium Instruksional I/II
Departemen Teknik Kimia ITB
Modul 1.12 Dinamika Proses Halaman 6 dari 39
digunakan untuk menentukan aksi pengendalian yang harus diambil apabila
menggunakan sistem pengendalian feed forward.
Sistem pengendali (controller) adalah elemen aktif dalam sistem pengendalian
yang menerima informasi dari pengukuran dan membuat tindakan yang sesuai untuk
mengatur harga manipulated variables. Pengaturan manipulated variables sangat
bergantung pada control law yang diterapkan secara otomatis pada controller.
Beberapa control law yang umum diterapkan pada sistem pengendalian:
1. Penggunaan proportional controller (P-controller) dimana nilai output dari P-
controller akan sebanding terhadap error.
sc c(t).K(t)c' +∈= (1)
2. Penggunaan proportional-integral controller (PI-controller) dimana nilai output dari
PI-controller akan sebanding terhadap error + suatu faktor dikali nilai integrasi
error sebagai fungsi waktu
s
t
oI
cc c(t).dt.
τK(t).K(t)c' ∫ +∈+∈= (2)
3. Penggunaan proportional-integral-derivative controller dimana nilai output dari
PID-controller akan ditentukan oleh konstanta yang menghubungkan kesebandingan
error terhadap output + suatu faktor dikali nilai integrasi error sebagai fungsi waktu
+ suatu faktor dikalu nilai defernsial (gradien) error sebagai fungsi waktu.
s
t
oDc
I
cc c
dt..τK(t).dt.
τK(t).K(t)c' +
∈+∈+∈= ∫ (3)
Dalam aspek pengendalian seluruh pabrik tidak hanya melibatkan satu unit
proses, seperti CSTR, tangki berpengaduk, kolom distilasi. Pada kenyataannya proses
produksi terdiri dari banyak unit yang saling berhubungan dengan adanya aliran bahan
(meterial) dan energi dari satu unit ke unit lainnya. Pada proses kimia tersebut akan
timbul hal-hal karakteristik yang tidak terjadi pada pengopersian satu unit proses saja.
Kemajuan teknologi komputer yang sangat pesat dengan harga yang semakin terjangkau

Panduan Pelaksanaan Laboratorium Instruksional I/II
Departemen Teknik Kimia ITB
Modul 1.12 Dinamika Proses Halaman 7 dari 39
membuat perangkat ini banyak digunakan untuk pengendalian dalam proses-proses
kimia.
Pada setiap konfigurasi sitem pengendali dapat dibedakan masing-masing
elemen perangkat keras sebagai berikut:
1. Proses kimia
Proses kimia mewakili peralatan proses yang digunakan dan proses-proses/operasi
baik secara kimia maupun fisika yang terjadi di dalam peralatan tersebut.
2. Instrumen Pengukur atau Sensor
Peralatan pengukur/sensor digunakan untuk:
a. mengukur disturbance
b. mengukur controlled output variables
c. mengukur secondary ouput variables
Peralatan pengukur/sensor adalah sumber informasi yang mengidentifikasi hal-hal
yang sedang terjadi pada proses. Salah satu syarat penting dalam pemilihan sensor
adalah hasil pengukuran sensor harus dapat ditransmisikan dengan mudah. Contoh
instrumen pengendalian yang dipakai pada pabrik formaldehid dan hidrogen
peroksida ini adalah termokopel, venturi meter, composition analyzer.
3. Transducers
Beberapa hasil pengukuran tidak dapat digunakan untik tujuan pengendalian
sebelum dikonversikan menjadi besaran fisik yang dapat dengan mudah
ditransmisikan seperti tegangan listrik. Transducer merupakan alat yang digunakan
untuk mengonversi hasil pengukuran menjadi besaran yang ditransmisikan.
4. Jalur transmisi dan amplifier
Jalur transmisi merupakan media untuk membawa sinyal hasil pengukuran dari alat
ukur ke controller. Pada banyak kasus sinyal yang dihasilkan alat ukur terlalu lemah
untuk ditransmisikan sehingga sinyal tersebut harus diperkuat terlebih dahulu
dengan amplifier.
5. Elemen Pengendali
Elemen pengendali adalah perangkat keras yang memiliki intelegensi. Perangkat ini
menerima informasi dari alat ukur dan memutuskan tindakan yang harus dilakukan.
6. Elemen Pengendali Akhir
Elemen pengendali akhir merupakan perangkat keras yang melaksanakan tindakan
yang diperintahkan controller. Elemen pengendali akhir yang diaplikasikan pada
Panduan Pelaksanaan Laboratorium Instruksional I/II
Departemen Teknik Kimia ITB
Modul 1.12 Dinamika Proses Halaman 8 dari 39
perancangan pabrik ini adalah control valve yang membuka dan menutup sampai
derajat tertentu sesuai keputusan controller.
7. Elemen pencatat
Elemen pencatat merupakan bagian dari sistem pengendali yang mencatat semua
variabel sehingga kelakukan proses yang sedang berlangsung dapat
didemonstrasikan secara visual.
IV.2 Pemodelan Kelakuan Dinamik dan Satitik Proses Kimiawi
Representasi matematis gejala (fenomena) fisika dan kimiawi yang terjadi dalam
proses kimia membentuk model dari sistem. Kegiatan yang mengarah pada pembentukan
model disebut modelling (pemodelan). Untuk menginvestigasi bagaimana kelakuan
proses kimia (output) berubah dengan waktu karena pengaruh perubahan external
disturbance, manipulated variables, dan desain pengendali (controller) yang digunakan,
dapat ditempuh 2 pendekatan:
1. Pendekatan eksperimental (Experimental approach)
Pada pendekatan eksperimental, peralatan-peralatan proses kimia yang dipelajari
tersedia secara fisik. Pada pendekatan ini, berbagai input dari peralatan-peralatan
tersebut (disturbances dan manipulated variables) dapat diubah-ubah dengan
mudah, dan perubahan output yang terjadi terhadap waktu dapat diamati.
Pendekatan eksperimental menita banyak waktu, tenaga, dan biaya.
2. Pendekatan teoretis
Pendekatam teoretis memungkinkan dilakukannya kajian terhadap kelakuan
dinamik/ statik proses sebelum peralatan proses dibangun. Pada keadaan ini,
perancangan sistem pengendali tidak bisa didasarkan pada prosedur eksperimen,
sehingga untuk mempelajari kelakuan proses diperlukan representasi proses
kimia yang akan dipelajari dalam bentuk lain (melalui pendekatan-pendekatan
teoretis)
Seperti dikemukakan di atas, pengetahuan mengenai kelakuan proses sangat
dibutuhkan pada perancangan alat instrumentasi, padahal peralatan proses yang akan
dikendalikan seringkali belum ada/ tersedia, sehingga kelakuan proses tidak dapat
dipelajari melalui eksperimen. Pada sisi lain, meskipun perlatan proses yang dibutuhkan
telah tersedia, prosedur eksperimen yang diperlukan biasanya sangat mahal. Solusi
terhadap masalah adalah dengan merepresentasikan proses kimia tersebut dalam bentuk
Panduan Pelaksanaan Laboratorium Instruksional I/II
Departemen Teknik Kimia ITB
Modul 1.12 Dinamika Proses Halaman 9 dari 39
model matematika yang sesuai untuk menggambarkan kelakuan proses. Biasanya
hubungan matematika yang harus diketahui adalah:
output = f1(disturbance)
output = f2 (manipulated variable)
Agar nilai output tetap sebesar nilai yang telah diset sebelumnya, manipulated variable
harus memiliki besar tertentu yang mengakibatkan:
f1(disturbance) + f2 (manipulated variable) = 0.
Untuk menetapkan karakteristik dan kelakuan sistem pemroses diperlukan:
1. himpunan fundamental dependant quantity, yang nilainya akan menjelaskan
keadaan sistem. Besaran ini terdiri dari massa, energi, dan momentum.
2. Himpunan persamaan dari fundamental variables yang akan menjelaskan
bagaimana keadaan sistem berubah dengan waktu.
Fundamental dependent variables sering kali tidak dapat diukur secara
langsung. Pada kondisi ini perlu dipilih variabel-variabel lain yang dapat diukur dengan
baik, yang jika digabungkan dapat menghasilkan nilai fundamental variable yang
dibutuhkan. Fundamental variable massa, energi, momentum, dapat ditetapkan dari
densitas, konsentrasi, temperatur, tekanan, dan laju alir. Variabel-variabel yang
memberikan karakteristik pada suatu proses ini disebut state variables dan nilainya
mendefinisikan keadaan (state) dari sistem pemroses.
Persamaan-persamaan yang menghubungkan state variables dengan berbagai
independent variables disebut persamaan keadaan (state equations) yang dapat
diturunkan menggunkan penerapan prinsip kekekalan (conservation principle) terhadap
fundamental quantities.
Prinsip kekekalan besaran S adalah sebagai berikut:
momentum S totalenergi S kompnen massa S totalmassa S dimana
wakturentangsistem di dikonsumsi
Sjumlah
wakturentangsistem di idiregeners
Sjumlah
wakturentangsistemkeluar Saliran
wakturentangsistemmasuk Saliran
wakturentangsistem dalam
S akumlasi
====
−
+
−
=
Dengan perjanjian, besaran dianggap (+) bila memasuki sistem dan diangap (–) bila
keluar dari sistem. Penerapan prinsip kekekalan seeprti persamaan di atas akan
menghasilkan persamaan-persamaan diferensial dengan besaran fundamental sebagai

Panduan Pelaksanaan Laboratorium Instruksional I/II
Departemen Teknik Kimia ITB
Modul 1.12 Dinamika Proses Halaman 10 dari 39
dependent variables dan waktu sebagai independent variable. Penyelesaian persamaan-
persamaan diferensial tersebut akan menentukan kelakuan dinamik proses pada keadaan
tunak (steady state). Pada keadaan ini, laju akumulasi fundamental quantity S terhadap
waktu sama dengan 0, sehingga akan dihasilkan himpunan persamaan-persamaan
aljabar.
Selain penggunaan persamaan-persamaan dari hukum kekekalan, juga
dibutuhkan hubungan matematik lain utnuk melengkapi model matematik tersebut,
seperti:
1. laju perpindahan massa, energi, momentum
2. laju reaksi
3. kesetimbangan kimia
IV.2 Dead Time
Dalam pemodelan sederhana, efek perubahan pada input variables dianggap
dapat terdeteksi secara langsung pada output variables. Pada kenyataannya, bila terjadi
perubahan pada input variables dari sistem, terdapat tenggang/ interval waktu sebelum
efek perubahan tersebut dapat teramati pada output variable dari sistem. rentang waktu
tersebut dihitung sebagai:
Deat time = transportation lag = pure delay = distance-velocity lag.
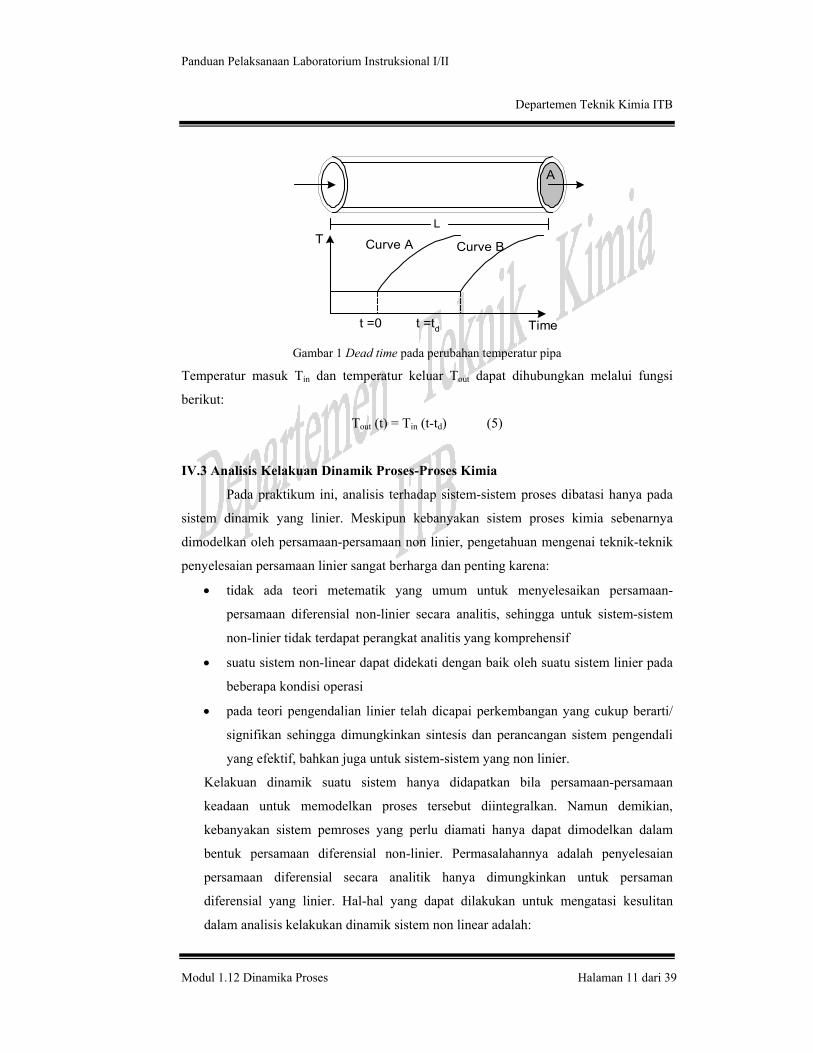
Hal ini dapat diamati pada pengukuran temperatur. Misalkan pada suatu pipa
mengalir fluida incompresible yang tidak bereaksi. Jika pipa tersebut terisolasi secara
termal dengan sempurna dan panas yang terjadi akibat gesekan fluida yang mengalir
dapat diabaikan, maka pada keadaan tunak (steady state) temperaur keluar Tout akan
sama dengan temperatur masuk Tin. Jika mulai t=0 temperatur masuk berubah dengan
pola seperti pada Gambar 1 maka temperatur keluar akan tetap bernilasi sama dengan
temperatur pada saat steady state, Tout sampai perubahan yang terjadi mencapai ujung
keluar pipa. Pola perubahan temperatur masuk dan keluar ini dapat dilihat pada Gambar
1. Setelah perubahan temperatur masuk mencapai ujung pipa keluar, pola perubahan
temperatur identik dengan pola perubahan temperatur masuk, dengan tenggang waktu
keterlembatan atau dead time sebesar td detik. Lamanya dead time td, tersebut dihitung
dengan:
etrikalir volumlaju pipa volume
=dt (4)
Panduan Pelaksanaan Laboratorium Instruksional I/II
Departemen Teknik Kimia ITB
Modul 1.12 Dinamika Proses Halaman 11 dari 39
LT
Time
Curve A Curve B
t =0 t =td
A
Gambar 1 Dead time pada perubahan temperatur pipa
Temperatur masuk Tin dan temperatur keluar Tout dapat dihubungkan melalui fungsi
berikut:
Tout (t) = Tin (t-td) (5)
IV.3 Analisis Kelakuan Dinamik Proses-Proses Kimia
Pada praktikum ini, analisis terhadap sistem-sistem proses dibatasi hanya pada
sistem dinamik yang linier. Meskipun kebanyakan sistem proses kimia sebenarnya
dimodelkan oleh persamaan-persamaan non linier, pengetahuan mengenai teknik-teknik
penyelesaian persamaan linier sangat berharga dan penting karena:
• tidak ada teori metematik yang umum untuk menyelesaikan persamaan-
persamaan diferensial non-linier secara analitis, sehingga untuk sistem-sistem
non-linier tidak terdapat perangkat analitis yang komprehensif
• suatu sistem non-linear dapat didekati dengan baik oleh suatu sistem linier pada
beberapa kondisi operasi
• pada teori pengendalian linier telah dicapai perkembangan yang cukup berarti/
signifikan sehingga dimungkinkan sintesis dan perancangan sistem pengendali
yang efektif, bahkan juga untuk sistem-sistem yang non linier.
Kelakuan dinamik suatu sistem hanya didapatkan bila persamaan-persamaan
keadaan untuk memodelkan proses tersebut diintegralkan. Namun demikian,
kebanyakan sistem pemroses yang perlu diamati hanya dapat dimodelkan dalam
bentuk persamaan diferensial non-linier. Permasalahannya adalah penyelesaian
persamaan diferensial secara analitik hanya dimungkinkan untuk persaman
diferensial yang linier. Hal-hal yang dapat dilakukan untuk mengatasi kesulitan
dalam analisis kelakukan dinamik sistem non linear adalah:
Panduan Pelaksanaan Laboratorium Instruksional I/II
Departemen Teknik Kimia ITB
Modul 1.12 Dinamika Proses Halaman 12 dari 39
• melakukan simulasi sistem non-linear pada komputer analog atau digital,
dan menghitung penyelesaiannya secara numerik,
• mentransformasikan sistem non-linear menjadi suatu sistem yang linear
melalui transformasi variabel-variabel sistem non linear tersebut,
• mengembangkan suatu model linier yang kelakuan dinamiknya mendekati
sistem linier pada daerah kondisi operasi tertentu yang ditetapkan.
Penyelesaian PD non linear secara numerik diselesaikan dengan bantuan
komputer. Simulasi komputer sekarang telah digunakan secara luas untuk
menganalisis kelakuan dinamik proses-proses kimia untuk membantu
perancangan perangkat pengendali dan mempelajari efektivitas suatu sistem
pengendali. Simulasi proses kimia menggunakan komputer digital mencakup
penyelesaian kumpulan persamaan diferensial dan aljabar yang digunakan untuk
menggambarkan kelakuan proses. Beberapa kategori metoda numerik yang
dapat digunakan untuk menyelesaikan persamaan diferensial dan aljabar non-
linier adalah:
1. Metoda numerik untuk penyelesaian persamaan-persamaan aljabar
Pada keadaan tunak, persamaan keadaan sistem akan berwujud persamaan
aljabar yang sederhana, karena laju akumulasi akan sama dengan nol.
Dengan demikian, kelakuan proses pada keadaan tunak dapat ditentukan
dengan menyelesaikan kumpulan persamaan aljabar yang memodelkan
keadaan proses. Seluruh metoda numerik untuk menyelesaikan persamaan
aljabar menerapkan cara trial and error secara iteratif. Metoda iterasi yang
tepat akan menyebabkan persamaan-persamaan iterasi tersebut bergerak
secara konvergen menuju solusi yang diinginkan. Beberapa metoda iterasi
persamaan aljabar yang sering digunakan adalah: metoda setengah interval,
metoda substitusi berturut, dan metoda Newton Raphson.
2. Pengintegrasian numerik persamaan-persamaan deferensial
Cara yang digunakan untuk pengintegrasian secara numerik adalah dengan
mendekati persamaan deferensial yang sinambung dengan persamaan-
persamaan berbeda hingga yang diskret. Metoda pengintegralan secara
numerik yang digunakan adalah metoda eksplisit dan implisit. Kunci
pemilihan suatu teknik integrasi yang tepat adalah kestabilan prosedur dan

Panduan Pelaksanaan Laboratorium Instruksional I/II
Departemen Teknik Kimia ITB
Modul 1.12 Dinamika Proses Halaman 13 dari 39
kecepatan mencapai penyelesaian. Metoda integrasi yang populer adalah
metoda Runge-Kutta Orde 4.
IV.4 Kelakuan Dinamik Sistem Orde Pertama
Sistem orde pertama adalah suatu sistem yang outputnya y(t) dapat dimodelkan
oleh suatu persamaan diferensial orde pertama. Dengan demikian bentuk umum sistem
orde pertama untuk sistem linier atau hasil linearisasi adalah sebagai berikut:
)(.. 01 tfbyadtdya =+ (6)
dengan f(t) adalah input dari sistem (forcing function).
Jika a0 tidak 0, persamaan tersebut dapat ditulis menjadi:
.f(t)aby
dtdy.
aa
00
1 =+ (7)
Jika dilakukan pendefinisian pK==0
p0
1
abdan
aa
τ , akan dihasilkan persamaan:
.f(t)Kydtdy.p p=+τ (8)
dengan τp = konstanta waktu (time constant) proses
Kp = steady state gain/ static gain/ gain proses
Jika y(t) dan f(t) terdapat dalam bentuk variabel penyimpangan di sekitar kondisi tunak,
dan syarat awal untuk sistem tersebut adalah: y(0)=0 dan f(0)=0, maka penurunan fungsi
transfer sistem orde pertama tersebut:
ssp f(t)-f(t)(t)f'dan y-yy'dengan (t).f'Ky'dtdy'. ===+ pτ (9)
)(f.K (s) y (s) y.s. pp s=+τ (10)
sehingga
( ) )(f.K (s) y 1 .s pp s=+τ (11)
dan fungsi transfer orde pertama dapat dinyatakan sebagai:
( ) 1 .sK
f(s)(s) yG(s)
p
p
+==τ
(12)
Sistem dengan fungsi transfer seperti pada persamaan tersebut dikenal sebagai sitem lag
orde pertama (first order lag), lag linier, atau lag transfer eksponensial.

Panduan Pelaksanaan Laboratorium Instruksional I/II
Departemen Teknik Kimia ITB
Modul 1.12 Dinamika Proses Halaman 14 dari 39
Untuk kasus dengan a0=0, maka:
f(t)'Kf(t)ab
dtdydan b.f(t)
dtdy.a p
11 ===
dan memiliki fungsi transfer : s
'Kf(s)
(s) yG(s) p== .
Sistem dengan fungsi linier tersebut adalah sistem kapasitif murni (purely capasitive)
atau integrator murni.
Proses orde pertama dapat dikenali dari:
1. kemampuannya menyimpan (menampung) massa, energi, atau momentum
2. terdapatnya tahanan yang terkait dengan aliran massa, energi, dan momentum
dalam mencapai kapasitas tampung tersebut.
Dengan demikian, response dinamik tangki-tangki yang memiliki kemampuan
untuk menyimpan cairan atau gas dapat dimodelkan sebagai sistem orde pertama. Pada
tangki-tangki ini, tahanan yang terkait adalah pompa, valve, penghalang, dan pipa-pipa
yang terdapat pada aliran cairan/gas masuk atau keluar tangki. Respons temperatur
sistem gas, cairan, dan padatan yang dapat menyimpan energi juga dapat dimodelkan
sebagai sistem orde pertama. Untuk sistem-sistem ini, tahanan yang terkait adalah
perpindahan panas melalui dinding, cairan, atau gas. Dengan kata lain, suatu proses yang
memliki kemampuan untuk menyimpan massa dan energi dan kemudian bertindak
sebagai buffer antara aliran masuk dan keluarnya, dapat dimodelkan sebagai sistem orde
pertama. Lag orde pertama dengan kemampuan menyimpan massa dan energi
merupakan jenis komponen dinamik yang paling umum dijumpai dalam suatu pabrik
kimia.
Respons Dinamik dari Suatu Sistem Lag Orde Pertama
Fungsi transfer untuk sistem lag orde pertama adalah ( ) 1 .sK
f(s)(s) yG(s)
p
p
+==τ
Jika f(t) berubah sesuai fungsi step satuan dengan f(s)= 1/s, maka:
( ) 1..KK
1 .sK
(s) yp
ppp
p
p
+−=
+=
sss ττ
τ (13)
Hasil inversi dari persamaan di atas adalah:
y(t) = Kp [1-exp(-t/τp)] (14)
Panduan Pelaksanaan Laboratorium Instruksional I/II
Departemen Teknik Kimia ITB
Modul 1.12 Dinamika Proses Halaman 15 dari 39
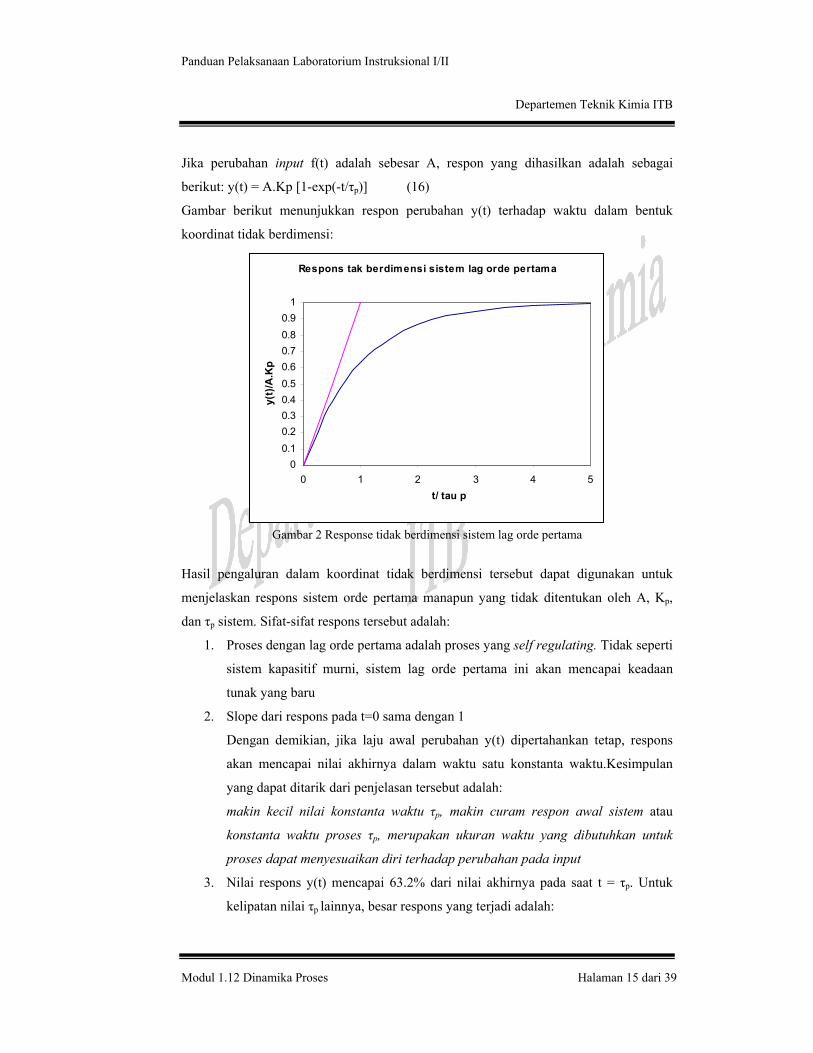
Jika perubahan input f(t) adalah sebesar A, respon yang dihasilkan adalah sebagai
berikut: y(t) = A.Kp [1-exp(-t/τp)] (16)
Gambar berikut menunjukkan respon perubahan y(t) terhadap waktu dalam bentuk
koordinat tidak berdimensi:
Respons tak berdimensi sistem lag orde pertama
00.10.20.30.40.50.60.70.80.9
1
0 1 2 3 4 5t/ tau p
y(t)
/A.K
p
Gambar 2 Response tidak berdimensi sistem lag orde pertama
Hasil pengaluran dalam koordinat tidak berdimensi tersebut dapat digunakan untuk
menjelaskan respons sistem orde pertama manapun yang tidak ditentukan oleh A, Kp,
dan τp sistem. Sifat-sifat respons tersebut adalah:
1. Proses dengan lag orde pertama adalah proses yang self regulating. Tidak seperti
sistem kapasitif murni, sistem lag orde pertama ini akan mencapai keadaan
tunak yang baru
2. Slope dari respons pada t=0 sama dengan 1
Dengan demikian, jika laju awal perubahan y(t) dipertahankan tetap, respons
akan mencapai nilai akhirnya dalam waktu satu konstanta waktu.Kesimpulan
yang dapat ditarik dari penjelasan tersebut adalah:
makin kecil nilai konstanta waktu τp, makin curam respon awal sistem atau
konstanta waktu proses τp, merupakan ukuran waktu yang dibutuhkan untuk
proses dapat menyesuaikan diri terhadap perubahan pada input
3. Nilai respons y(t) mencapai 63.2% dari nilai akhirnya pada saat t = τp. Untuk
kelipatan nilai τp lainnya, besar respons yang terjadi adalah:

Panduan Pelaksanaan Laboratorium Instruksional I/II
Departemen Teknik Kimia ITB
Modul 1.12 Dinamika Proses Halaman 16 dari 39
t τp 2τp 3τp 4τp
y(t) sebagai fungsi harga akhir (%) 63.2 86.5 95 98
4. Nilai akhir respons (nilai pada keadaan tunak baru) sama dengan Kp untuk
perubahan step satuan pada input, atau AKp untuk perubahan step sebesar A.
Karakteristik ini menjelaskan nama gain tunak atau gain statik untuk parameter
Kp, karena untuk setiap perubahan step pada input, perubahan yang dihasilkan
oleh output pada keadaan tunak adalah: ∆(output) = Kp. ∆(input). Hal ini juga
menjelaskan seberapa besar nilai input harus diubah untuk mendapatkan output
yang diinginkan pada proses dengan besar gain tertentu Kp. Dengan demikian,
untuk mendapatkan besar perubahan output yang sama dibutuhkan: perubahan
kecil pada input bila Kp besar (sistem sangat sensitif), dan perubahan besar pada
input bila Kp kecil.
IV.5 Kelakuan Dinamik Sistem Orde Kedua
Sistem-sistem dengan kelakuan dinamik orde kedua adalah sistem yang output-
nya y(t) dapat dijelaskan sebagai hasil penyelesaian suatu persamaan diferensial orde
kedua. Sistem orde kedua linier dapat dijelaskan dengan persamaan berikut:
b.f(t)yadtdy.a
dtyd.a 012
2
2 =++ (17)
Jika a0 tidak 0, maka persamaan tersebut akan menjadi:
.f(t)ydtdy...2
dtyd. 2
22
pK=++ τξτ (18)
dengan 0
p0
1
0
22
abKdan
aa
2ξξdan aa
τ ===
dimana:
τ = perioda alamiah/ natural period dari isolasi sistem
ξ = faktor peredaman/ damping factor
Kp = gain tunak atau statik sistem
Transformasi Laplace dari persamaan orde 2 menghasilkan fungsi transfer baku sebagai
berikut: ( ) 1...2 .sK
f(s)(s) yG(s) 22
p
++==
sτξτ (19)

Panduan Pelaksanaan Laboratorium Instruksional I/II
Departemen Teknik Kimia ITB
Modul 1.12 Dinamika Proses Halaman 17 dari 39
Sistem-sistem dengan kelakuan dinamik orde kedua atau lebih tinggi dapat
diakibatkan oleh berbagai situasi fisik yang dapat diklasifikasikan dalam 3 kategori
berikut:
1. Proses multikapasitas (Multicapacity Process), yaitu proses yang terdiri dari
deretan dua atau lebih kapasitor yang harus dilalui aliran massa atau energi.
2. Sistem orde kedua yang inheren, seperti komponen padatan mekanis atau cairan
dari suatu proses yang memiliki inersia dan mengalami percepatan.
3. Suatu sistem pemroses dan pengendaliannya juga dapat mengakibatkan
terjadinya sistem orde kedua atau orde yang lebih tinggi. Pada kasus-kasus
seperti ini, pengendali yang dipasang pada suatu unit pemroses mengakibatkan
dinamika tambahan, yang jika digabungkan dengan dinamika unit pemroses
menghasilkan kelakuan dinamik orde kedua atau lebih tinggi.
Kebanyakan sistem orde 2 atau lebih yang dijumpai dalam suatu pabrik kimia adalah
proses multikapasitas atau merupakan akibat dari penambahan sistem pengendali pada
proses. Sistem-sistem dengan kelakuan dinamik orde 2 atau lebih tinggi yang inheren
sangat jarang dijumpai pada proses kimia.
Untuk suatu perubahan step satuan pada input f(t) akan didapatkan persamaan:
( )ss . 1...2 .sK
(s) y 22p
++=
τξτ (20)
Kedua pole dari persamaan fungsi transfer orde 2 merupakan akar dari polinomial
karakteristik untuk sistem orde 2 berikut:
τ1ξ
tξp
2
1
−+−= dan
τ1ξ
tξp
2
1
−−−=
Dengan demikian perubahan output sistem orde 2 dengan imput step satuan adalah:
)).(.(/K
(s) y21
2p
pspss −−=
τ (21)
Dengan bentuk respon y(t) akan bergantung pada lokasi pole-pole p1 dan p2 pada bidang
kompleks. Berdasarkan letak pole-pole tersebut pada bidang kompleks, sistem orde
kedua dapat dibagai ke dalam 3 kasus berikut:
- Kasus A: Bila ξ>1, dihasilkan 2 poles berbeda dan nyata
- Kasus B: Bila ξ=1, dihasilkan 2 poles yang sama
- Kasus C: Bila ξ<1, dihasilkan 2 poles kompleks konjugat

Panduan Pelaksanaan Laboratorium Instruksional I/II
Departemen Teknik Kimia ITB
Modul 1.12 Dinamika Proses Halaman 18 dari 39
Kasus A: Overdumped Response
Pada kasus ini, inversi persamaan transfer orde 2 secara ekspansi fraksi parsial
akan menghasilkan persamaan:
−
−+−
−−=
τt1ξsinh
1ξξ
τt1ξ2cosh.
τξtexp1Kpy(t) 2
2 (22)
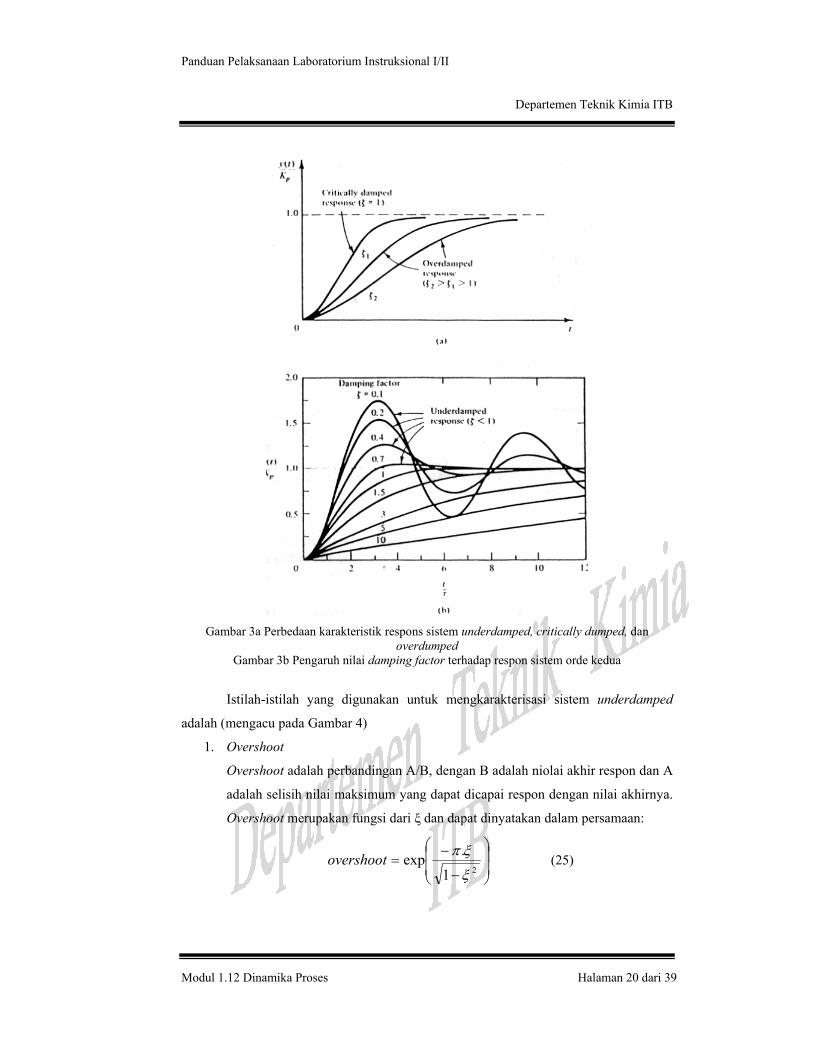
Respons yang diakibatkan oleh sistem ini untuk berbagai nilai ξ, ξ>1 ditunjukkan pada
Gambar 3a. Respons seperti ini disebut sebagai respon overdamped dan sedikit mimiliki
kemiripan dengan respon sistem orde pertama terhadap perubahan step pada inputnya.
Namun, bila dibandingkan dengan sistem orde pertama terlihat bahwa awal respon
sistem overdumped lebih terlembat bereaksi, dan responsnya kemudian juga agak
sluggish (lambat). Repons ini akan menjadi lebih lambat untuk nilai ξ besar. Artinya,
semakin besar ξ, sistem akan lebih teredam. Dengan bertambahnya waktu, respons
mendekati nilai ultimate/ nilai akhirnya secara asimtotik. Seperti pada sistem orde
pertama, gain untuk orde kedua ini dapat dinyatakan sebagai:
tunak)(input tunak)(output Kp
∆∆
=
Respons overdumped merupakan respons dari proses-proses multikapasitas yang
diakibatkan kombinasi sistem-sistem orde pertama dalam susunan seri.
Kasus B: Critically Dumped Response, jika ξ=1
Pada kasus ini, inversi terhadap persamaan fungsi transfer orde 2 adalah:
−
+=
τt.exp
τt1-1Kp. y(t) (23)
Kelakuan respons ini juga ditunjukkan pada Gambar 3a.
Kasus C: Underdamp Response
Pada kasus ini, inversi terhadap persamaan fungsi transfer orde 2 akan
menghasilkan bentuk persamaan berikut:
( )
+
−−=
−φωtsine
ξ111Ky(t) τ
ξt
2p (24)
Panduan Pelaksanaan Laboratorium Instruksional I/II
Departemen Teknik Kimia ITB
Modul 1.12 Dinamika Proses Halaman 19 dari 39
dengan τξ1 2−
=ω dan
−= −
ξφ
21 ξ1
tan
Respons underdamped untuk berbagai nilai faktor damping ξ ditunjukkan pada Gambar
3b. Dari gambar tersebut dapat dijelaskan bahwa:
1. Pada awal proses, respons sistem underdamped lebih cepat dari critically
damped ataupun overdamped, yang dikarakterisasi sebagai sluggish.
2. Meskipun pada awal proses respons sistem underdamped bereaksi lebih cepat,
dan mencapai nilai akhirnya dengan cepat juga, respon underdamped tidak
berhanti pada nilai akhir tersebut, melainkan terus berosilasi dengan amplitudo
yang terus mengecil. Kelakuan berosilasi inilah yang membuat respon
underdamped berbeda dengan respon-respon yang telah dibahas sebelumnya.
3. osilasi respon underdamped akan makin terasa jika nilai faktor damping ξ makin
kecil.
Hampir seluruh respon underdamped pada suatyu pabrik kimia disebabkan oleh interaksi
antara sistem pengendali dengan unit proses yang dikendalikannya, sehingga respon
underdamped merupakan jenis respon yang akan sangat sering dijumpai, dan
karakteristknya perlu dipelajari secara detail.
Panduan Pelaksanaan Laboratorium Instruksional I/II
Departemen Teknik Kimia ITB
Modul 1.12 Dinamika Proses Halaman 20 dari 39
Gambar 3a Perbedaan karakteristik respons sistem underdamped, critically dumped, dan
overdumped Gambar 3b Pengaruh nilai damping factor terhadap respon sistem orde kedua
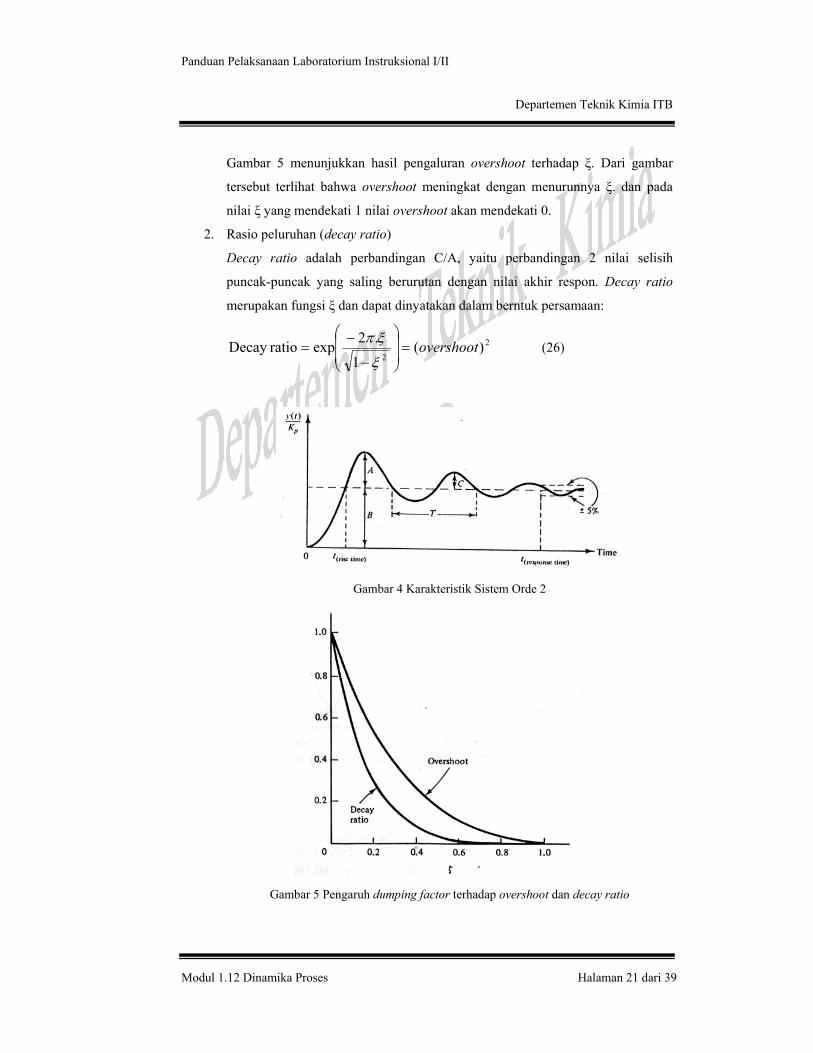
Istilah-istilah yang digunakan untuk mengkarakterisasi sistem underdamped
adalah (mengacu pada Gambar 4)
1. Overshoot
Overshoot adalah perbandingan A/B, dengan B adalah niolai akhir respon dan A
adalah selisih nilai maksimum yang dapat dicapai respon dengan nilai akhirnya.
Overshoot merupakan fungsi dari ξ dan dapat dinyatakan dalam persamaan:
−
−=
21.expξ
ξπovershoot (25)
Panduan Pelaksanaan Laboratorium Instruksional I/II
Departemen Teknik Kimia ITB
Modul 1.12 Dinamika Proses Halaman 21 dari 39
Gambar 5 menunjukkan hasil pengaluran overshoot terhadap ξ. Dari gambar
tersebut terlihat bahwa overshoot meningkat dengan menurunnya ξ. dan pada
nilai ξ yang mendekati 1 nilai overshoot akan mendekati 0.
2. Rasio peluruhan (decay ratio)
Decay ratio adalah perbandingan C/A, yaitu perbandingan 2 nilai selisih
puncak-puncak yang saling berurutan dengan nilai akhir respon. Decay ratio
merupakan fungsi ξ dan dapat dinyatakan dalam berntuk persamaan:
2
2)(
1
.2expratioDecay overshoot=
−
−=
ξ
ξπ (26)
Gambar 4 Karakteristik Sistem Orde 2
Gambar 5 Pengaruh dumping factor terhadap overshoot dan decay ratio
Panduan Pelaksanaan Laboratorium Instruksional I/II
Departemen Teknik Kimia ITB
Modul 1.12 Dinamika Proses Halaman 22 dari 39
3. Perioda Osilasi
Frekuensi radian isolasi dari suatu respon underdamped dapat dinyatakan dalam
persamaan:
τξ1
ωfrequencyRadian 2−
== (27)
sedang periode osilasi T dapat diturunkan menggunakan hubungan ω=2πf dan
f=1/T, dengan f frekuensi siklus.
2ξ1πτ2T−
= (28)
4. Perioda Osilasi Alamiah
Sistem orde 2 dengan nilai ξ=0 merupakan sistem yang bebas peredaman.
Fungsi transfer dari sistem ini adalah:
+
−
=+
=
τ1js
τ1js
/τK1sτ
KG(s)
2p
22p (29)
Sistem ini memiliki dua pole imajiner murni dan sesuai analisis akan berosilasi
terus menerus dengan amplitudo konstan dan dengan frekuensi alamiah ωn=1/τ.
Perioda siklus Tn dari respon tersebut adalah Tn=2π τ.
5. Waktu Respon
Respon suatu sistem underdamped setelah berosilasi akan mencapai nilai
akhirnya pada waktu tak berhingga. Untuk kepraktisan telah disepakati bahwa
respon underdamped dapat dianggap telah mencapai nilai akhirnya jika nilai
respon telah mencapai sekitar 5% dari nilai akhir tersebut dan terus berosilasi
dalam rentang tersebut. Waktu yang diperlukan oleh sistem underdamped untuk
mencapai keadaan tersebut disebut response time.
6. Rise Time
Istilah rise time digunakan untuk menyatakan kecepatan suatu sistem
underdamped berespon. Rise time didefinisikan sebagai waktu yang dibutuhkan
untuk respon pertama kali mencapai nilai akhirnya. Pada nilai damping factor
makin kecil, rise time juga akan semakin kecil (respon makin cepat), tetapi
overshoot makin besar.

Panduan Pelaksanaan Laboratorium Instruksional I/II
Departemen Teknik Kimia ITB
Modul 1.12 Dinamika Proses Halaman 23 dari 39
IV.6 Pengujian Dinamika Proses Pengaliran Fluida dan Pengukuran Temperatur
Seperti telah disebutkan sebelumnya, dinamika proses adalah variasi unjuk kerja
suatu proses dinamik dari waktu ke waktu sebagai respon terhadap gangguan-gangguan
dan perubahan-perubahan terhadap proses tersebut. Dinamika proses menunjukkan
adanya kondisi tidak unak dalam setiap proses/ sistem teknik kimia setelah diberi
gangguan untuk mencapai keadaan tunak baru. Ketidaktunakan ini diakibatkan adanya
gangguan pada sistem yang telah tunak. Pada praktikum ini, dinamika proses diamati
pada percobaan profil ketingian air dalam tangki terhadap waktu serta perubahan
temperatur terhadap waktu pada sebuah termometer.
V.6.1 Proses Dinamis pada Tangki
Kedinamisan tangki air diuji coba dengan pengosongan tangki dan pemberian
gangguan pada tangki berisi air yang tenang dengan ketinggian tunak.
Luas penampang tangki dikalibrasi dengan mengalurkan grafik volume terhadap
penurunan ketinggian air dalam tangki (h). Volume tangki dihitung dengan persamaan:
V = hD4. 2π
(30)
dimana 4. 2Dπ
adalah luas penampan tangki. Dengan demikian A adalah gradien dari
grafik V-h. Jika diketahui luas penampang, maka laju alir volumetrik dari valve yang
digunakan (dengan bukaan tertentu) dapat diketahui.
Pada percobaan ini digunakan 3 valve. Dua valve untuk mengalirkan air dari
reserviar, dan satu valve lain sebagai saluran keluaran tangki. Masing-masing valve
mempunyai karakteristik dan laju alir berbeda-beda. Pengukuran laju alir volumetrik
dilakukan dengan mengukur volume keluaran tiap selang waktu tertentu. Debit air biasa
dihitung dengan mencari gradien grafik Volume terhadap waktu. Persamaan yang
digunakan adalah:
tVQ ∆
∆= (31)
Debit air pada masing-masing valve bergantung pada variasi bukaan valve. Makin besar
bukaan valve, makin besar pula debit airnya. Perhitungan debit air ini dilakukan untuk
memperkirakan bukaan valve yang sesuai dengan yang dibutuhkan saat percobaan
simulasi gangguan.

Panduan Pelaksanaan Laboratorium Instruksional I/II
Departemen Teknik Kimia ITB
Modul 1.12 Dinamika Proses Halaman 24 dari 39
Proses pengosongan tangki dimaksudkan untuk menentukan parameter laju
volumeterik keluaran (k dan n). Laju volumetrik keluaran tangki merupakan fungsi dari
ketinggian air dalam tangki.
Dasar percobaan ini adalah persamaan Bernoulli:
22
22
12
11 ..
21..
21 hgv
PP
hgvPP
++=++ (32)
Mulut tangki dan saluran keluaran terbuka pada tekanan atmosfer sehingga PP
PP 21 = .
Persamaan tersebut menjadi:
[ ] [ ]212
12
2 ..21 hhgvv −=− (33)
Selanjutnya digunkan asumsi v12 dapat diabaikan terhadap v2
2 karena dianggap luas
penampang tangki jauh lebih besar daripada saluran keluaran sehingga
[ ] [ ]212
2 ..21 hhgv −= . Persamaan tersebut disederhanakan:
[ ]212 ..2 hhgv −= (34)
21
2 ..2 hgv ∆= (35)
v2 adalah laju linear, sedangkan debit adalah 21
2 ..2.. hgAvA ∆= . Dari persamaan ini
diketahui bahwa debit adalah fungsi h,
Q = k. hn (36)
pada kondisi ideal n=0,5.
Pada proses pengosongan tangki ini, neraca massa dalam tangki adalah:
akumulasi air = massa air masuk – massa air keluar
Pada proses pengosongan tangki massa air masuk = 0, sehingga:
akumulasi air = - massa air keluar
outQdtdV
−= (37)
nhkdtdhA .. −= (38)
nhAk
dtdh .−= (39)
Panduan Pelaksanaan Laboratorium Instruksional I/II
Departemen Teknik Kimia ITB
Modul 1.12 Dinamika Proses Halaman 25 dari 39
Dari persamaan tersebut disimpulkan bahwa laju perubahan ketinggian air dalam tangki
bergantung pada ketinggian tangki setiap saat. Konstanta k dan n merupakan parameter
yang menunjukkan keidelan tangki.
Data yang diperoleh adalah h dan t. Nilai k dan n bisa dicari dengan linearisasi
persamaan neraca massa:
−=
Akhn
dtdh lnln.ln (40)
dimana
−
Akln adalah gradien garis.
Cara lain yang lebih akurat adalah dengan metoda numerik dengan
menggunakan bantuan program komputer.
Simulasi gangguan pada tangki dilakukan dengan mengguanggiu sistem tangki
yang sudah tunak. Gangguan diberikan dengan menambahkan air masuk masuk secara
tiba-tiba atau mengurangi jumlah air yang sudah tunak degan memperbesar bukaan valve
keluaran.
Jika dilakukan gangguan penambahan air ke dalam tamgki, neraca massa tangki
akan menjadi:
akumulasi air = massa air masuk – massa air keluar
outQQQdtdhA −+= )(. 21 (41)
Dengan adanya tambahan air, maka debit keluaran akan berubah dan akhirnya mencapai
keadaan tunak yang kedua. Selama simulasi dicatat perubahan ketinggian terhadap
waktu. Umumnya keadaan tunak sulit dicapai, dibutuhkan waktu yang lebih lama dan
tangki dengan luas permukaan relatif besar untuk mencapai kondisi tunak yang
sempurna. Waktu untuk mencapai kondisi tunak dipengaruhi besar kecilnya debit pada
tiap-tiap valve. yang mempengaruhi parameter k dan n.
Kesalahan seringkali terjadi karena ketidaktepatan penentuan waktu saat
terjadinya kondisi tunak. Jika simulasi sudah berlangsung lama, perubahan ketinggian
air pada setiap variasi bukaan akan sangat lambat, walaupun mempunyai kecenderungan
untuk berubah pada jangka waktu yang lama.

Panduan Pelaksanaan Laboratorium Instruksional I/II
Departemen Teknik Kimia ITB
Modul 1.12 Dinamika Proses Halaman 26 dari 39
IV.6.2 Proses Dinamis pada Pengukuran Temperatur
Fenomena proses dinamis yang lain adalah pengukuran perubahan temperatur
akibat adanya perubahan temperatur yang mendadak, baik dari panas ke dingin maupun
dari dingin ke panas.
Alat ukur temperatur adalah termometer. Termometer berisi fluida yang
koefisien muainya cukup besar sehingga cukup sensitif terhadap perubahan temperatur.
Proses peprindahan yang terjadi pada termometer adalah proses perpindahan energi
dalam bentuk kalor. Tiga tahapan perpindahan kalor yang terjadi pada termometer
adalah:
1. konveksi dari lingkungan/medium ke lapisan film dinding gelas termometer-medium
2. konduksi dalam dinding gelas
3. konveksi dari dinding gelas ke fluida dalam termometer.
Dengan adanya ketiga hambatan perpindahan di atyas, mka tidak mengkin terjadi
respons yang bersamaan secara serempak dari termometer. Walaupun perubahan
temperaur terjadi secara mendadak, pasti ada keterlambatan termometer dalam
mengindra/ sensor temperatur dan memberikan hasil pengukurannya.
Neraca energi pada termometer tersebut adalah:
kalor masuk = kalor keluar + akumulasi kalor.
Asumsi-asumsi yang digunakan adalah:
1. tidak ada kalor yang keluar (untuk Tlingkungan yang lebih tinggi)
2. dinding gelas sangat tipis sehingga hambatan karena konduksi dapat diabaikan
3. tidak terjadi konstraksi atau pemuaian dinding gelas yang berakibat perubahan
volume fluida termometer
4. koefisien konveksi fluida termometer relatif besar sehingga dianggap tidak aka
panas yang terbuang karena konveksi ini
5. kapasitas panas fluida termometer konstan
6. temperatur fluida termometer sama ti setiap titik.
Dengan asumsi-asumsi tersebut, neraca energi menjadi:
inQdtdQ
= (42)
).(... TTAhdtdTCpm L −= (43)

Panduan Pelaksanaan Laboratorium Instruksional I/II
Departemen Teknik Kimia ITB
Modul 1.12 Dinamika Proses Halaman 27 dari 39
TTdtdT
AhCpm
L −=...
(44)
AhCpm..
adalah suatu konstanta yang disebut konstanta waktu τ. Konstanta waktu adalah
pengukuran waktu yang diperlukan bagi suatu proses untuk mencapai keadaan seperti
yang diberikan oleh inputnya. Dengan demikian, makin besar konstanta waktu suatu
proses, makin lama proses tersebut mencapai kondisi tunak baru.
Integrasi neraca energi pada pengukuran temperatur oleh termometer menjadi:
−=
−−
τt
ToTTT
L
L exp (45)
dimana To adalah temperatur pada saat t=0, dan TL adalah temperatur lingkungan.
Untuk menunjukkan unjuk kerja termometer raksa (dengan ataupun tanpa
termowel) dilakukan pengukuran temperatur fluida dari temperatur tinggi ke rendah dan
sebaliknya dari temperatur rendah ke tinggi.
Menurut pustaka, seharusnya harga τ termometer raksa akan lebih kecil daripada
harga τ termometer alkohol. Ini berarti termometer raksa lebih sensitif terhadap
perubahan temperatur daripada termometer alkohol.
Termometer diuji dengan dan tanpa menggunakan termowel. Termowel
digunakan untuk membantu pembacaan hasil pengukuran temperatur. Dengan adanya
termowel, konstanta waktu termometer akan makin besar karena adanya tahanan
perpindahan kalor yang makin besar. Akibatnya waktu yang dibutuhkan untuk mencapai
harga temperatur tiap saat lebih akurat. Pada percobaan dapat dilakukan variasi jenis
termowel.
Umumnya saat pengguanaan termowel terjadi fenomena lag phase pada awal
pengukuran temperatur. Hal ini akibat adanya perubahan temperatur yang mendadak
sehingga kalor tidak dapat langsung berpindah dari dinding termometer.
V. Rancangan Percobaan
V.1 Perangkat dan Alat Ukur
1. Satu unit perlengkapan praktikum dinamika prosessistem tangki
2. Termometer Gelas
3. Gelas Ukur
Panduan Pelaksanaan Laboratorium Instruksional I/II
Departemen Teknik Kimia ITB
Modul 1.12 Dinamika Proses Halaman 28 dari 39
4. Gelas Kimia
5. Tabung Reaksi
6. Stopwatch
7. Pemanas listrik
V.2 Bahan/ Zat Kimia
Beberapa jenis bahan pengisi termowell (seperti alkohol, air raksa, air, minyak, dll),
es
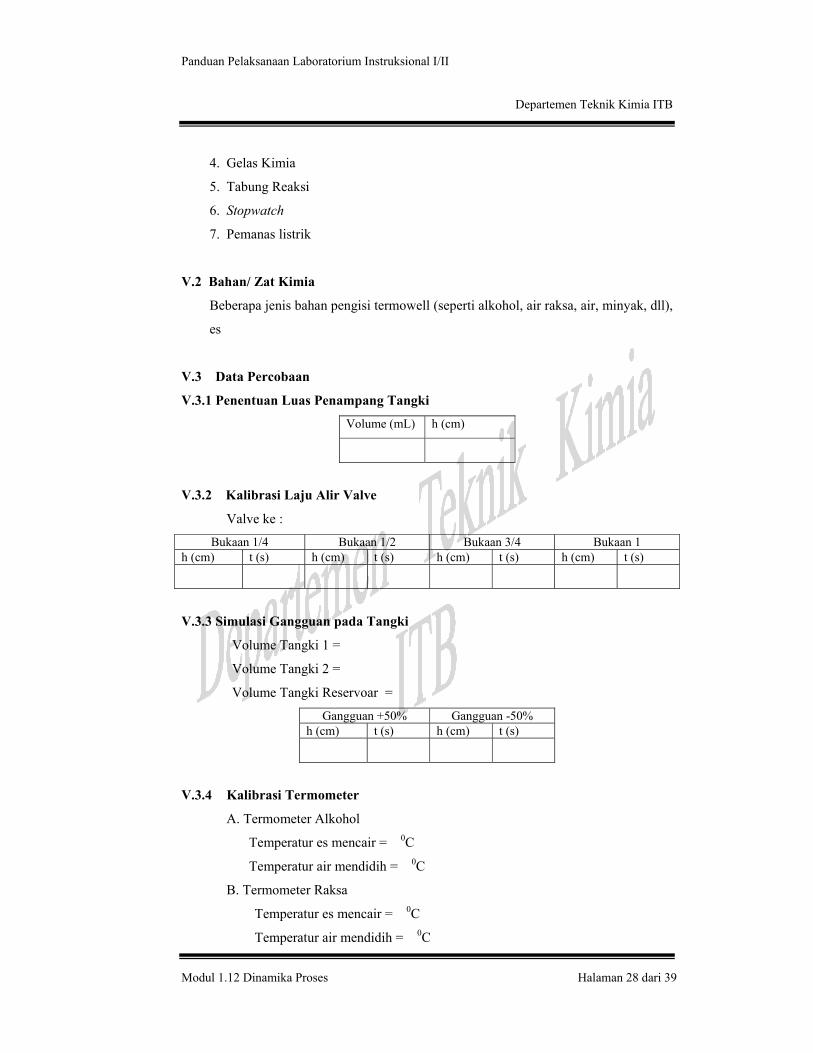
V.3 Data Percobaan
V.3.1 Penentuan Luas Penampang Tangki
Volume (mL) h (cm)
V.3.2 Kalibrasi Laju Alir Valve
Valve ke :
Bukaan 1/4 Bukaan 1/2 Bukaan 3/4 Bukaan 1 h (cm) t (s) h (cm) t (s) h (cm) t (s) h (cm) t (s)
V.3.3 Simulasi Gangguan pada Tangki
Volume Tangki 1 =
Volume Tangki 2 =
Volume Tangki Reservoar =
Gangguan +50% Gangguan -50% h (cm) t (s) h (cm) t (s)
V.3.4 Kalibrasi Termometer
A. Termometer Alkohol
Temperatur es mencair = 0C
Temperatur air mendidih = 0C
B. Termometer Raksa
Temperatur es mencair = 0C
Temperatur air mendidih = 0C
Panduan Pelaksanaan Laboratorium Instruksional I/II
Departemen Teknik Kimia ITB
Modul 1.12 Dinamika Proses Halaman 29 dari 39
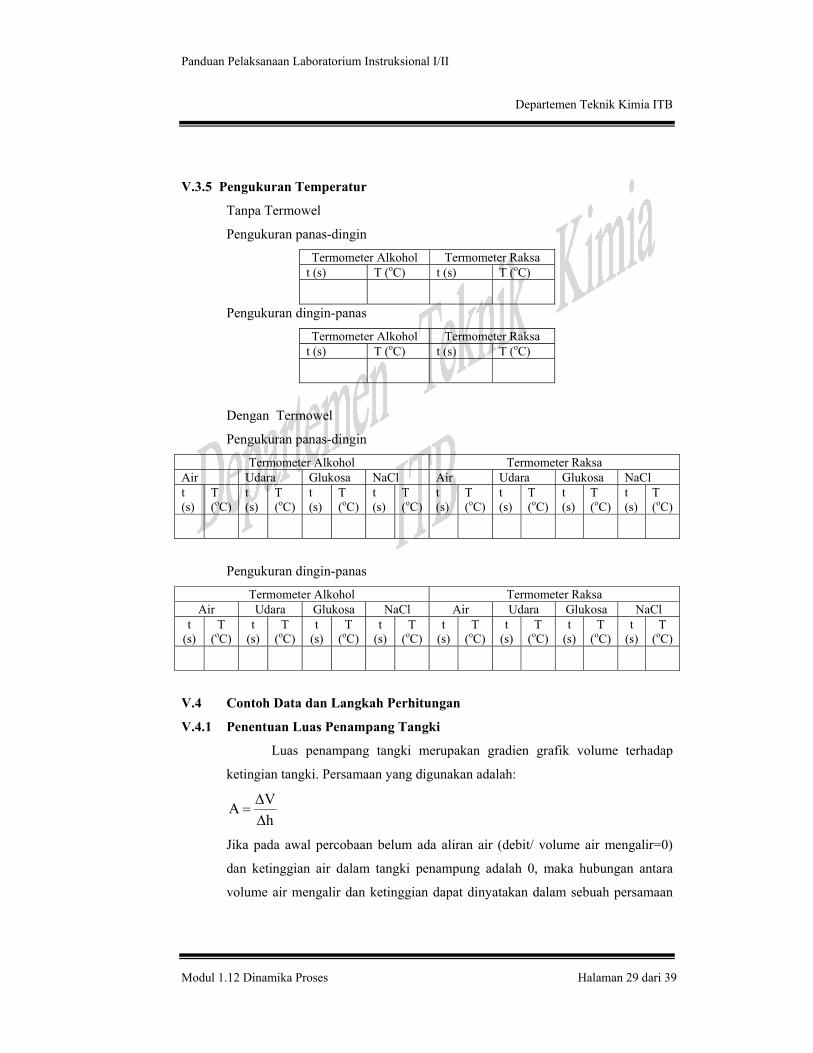
V.3.5 Pengukuran Temperatur
Tanpa Termowel
Pengukuran panas-dingin
Termometer Alkohol Termometer Raksa t (s) T (oC) t (s) T (oC)
Pengukuran dingin-panas
Termometer Alkohol Termometer Raksa t (s) T (oC) t (s) T (oC)
Dengan Termowel
Pengukuran panas-dingin
Termometer Alkohol Termometer Raksa Air Udara Glukosa NaCl Air Udara Glukosa NaCl t (s)
T (oC)
t (s)
T (oC)
t (s)
T (oC)
t (s)
T (oC)
t (s)
T (oC)
t (s)
T (oC)
t (s)
T (oC)
t (s)
T (oC)
Pengukuran dingin-panas
Termometer Alkohol Termometer Raksa Air Udara Glukosa NaCl Air Udara Glukosa NaCl
t (s)
T (oC)
t (s)
T (oC)
t (s)
T (oC)
t (s)
T (oC)
t (s)
T (oC)
t (s)
T (oC)
t (s)
T (oC)
t (s)
T (oC)
V.4 Contoh Data dan Langkah Perhitungan
V.4.1 Penentuan Luas Penampang Tangki
Luas penampang tangki merupakan gradien grafik volume terhadap
ketingian tangki. Persamaan yang digunakan adalah:
hV A ∆∆
=
Jika pada awal percobaan belum ada aliran air (debit/ volume air mengalir=0)
dan ketinggian air dalam tangki penampung adalah 0, maka hubungan antara
volume air mengalir dan ketinggian dapat dinyatakan dalam sebuah persamaan
Panduan Pelaksanaan Laboratorium Instruksional I/II
Departemen Teknik Kimia ITB
Modul 1.12 Dinamika Proses Halaman 30 dari 39
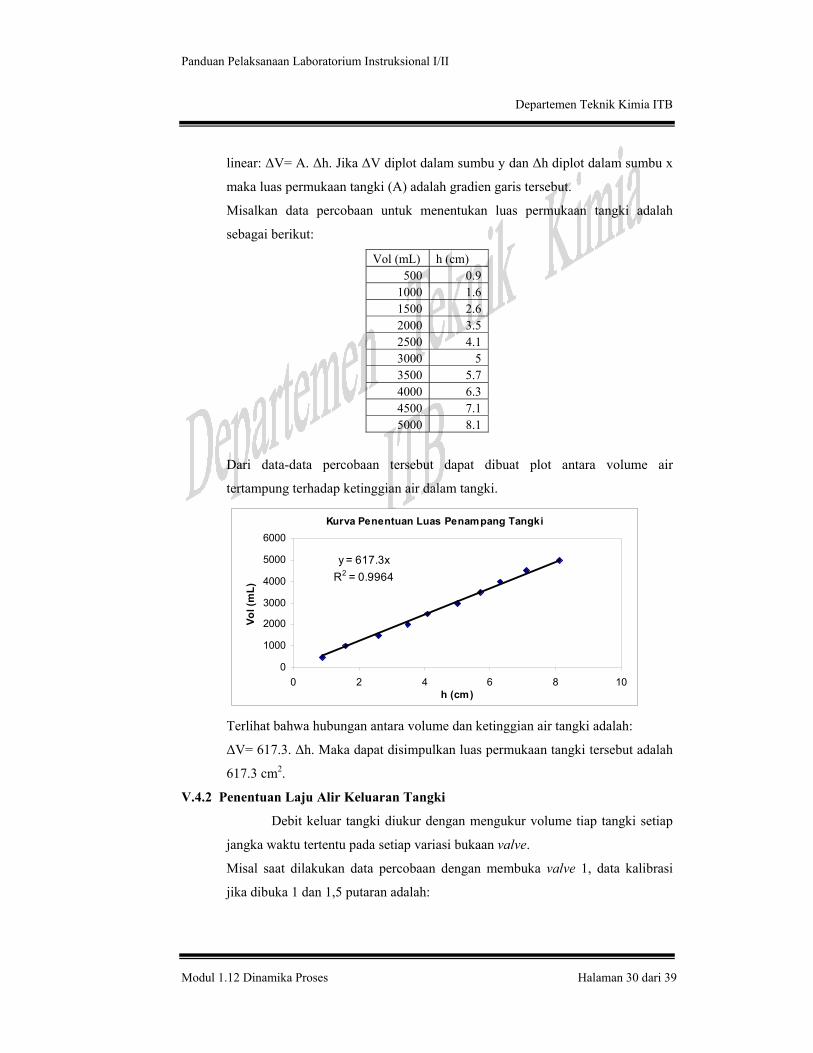
linear: ∆V= A. ∆h. Jika ∆V diplot dalam sumbu y dan ∆h diplot dalam sumbu x
maka luas permukaan tangki (A) adalah gradien garis tersebut.
Misalkan data percobaan untuk menentukan luas permukaan tangki adalah
sebagai berikut:
Vol (mL) h (cm) 500 0.9
1000 1.6 1500 2.6 2000 3.5 2500 4.1 3000 5 3500 5.7 4000 6.3 4500 7.1 5000 8.1
Dari data-data percobaan tersebut dapat dibuat plot antara volume air
tertampung terhadap ketinggian air dalam tangki.
Kurva Penentuan Luas Penampang Tangki
y = 617.3xR2 = 0.9964
0
1000
2000
3000
4000
5000
6000
0 2 4 6 8 10h (cm)
Vol (
mL)
Terlihat bahwa hubungan antara volume dan ketinggian air tangki adalah:
∆V= 617.3. ∆h. Maka dapat disimpulkan luas permukaan tangki tersebut adalah
617.3 cm2.
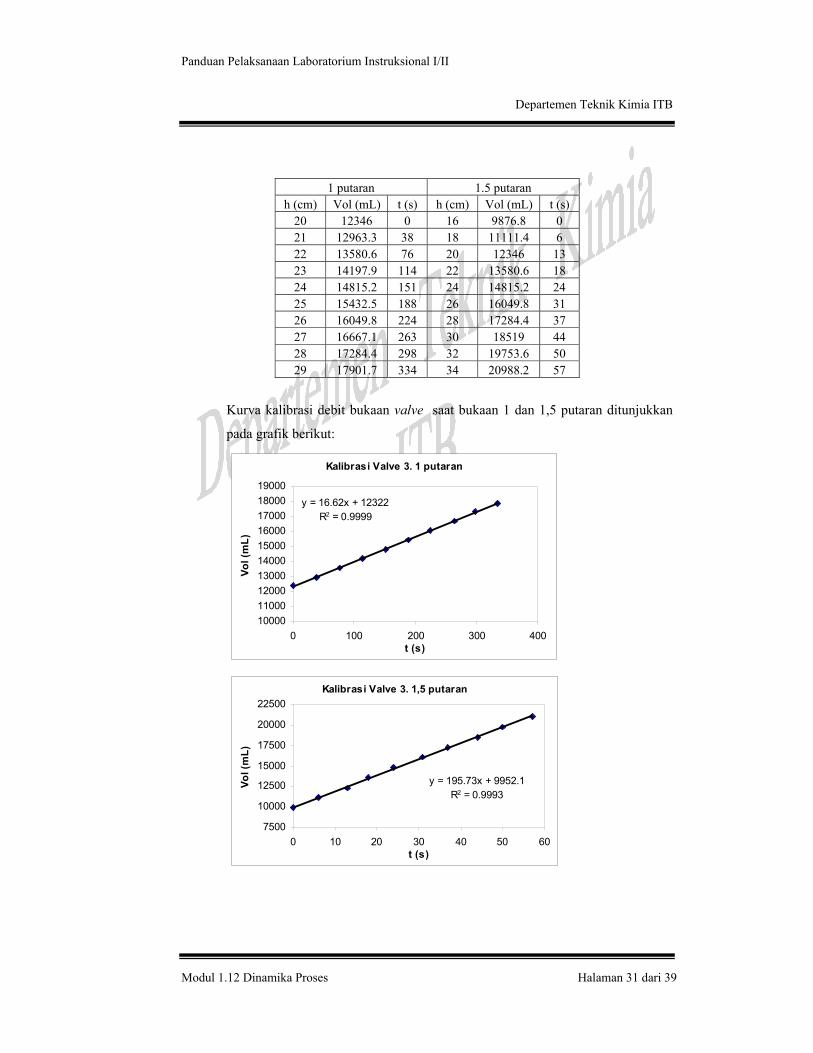
V.4.2 Penentuan Laju Alir Keluaran Tangki
Debit keluar tangki diukur dengan mengukur volume tiap tangki setiap
jangka waktu tertentu pada setiap variasi bukaan valve.
Misal saat dilakukan data percobaan dengan membuka valve 1, data kalibrasi
jika dibuka 1 dan 1,5 putaran adalah:
Panduan Pelaksanaan Laboratorium Instruksional I/II
Departemen Teknik Kimia ITB
Modul 1.12 Dinamika Proses Halaman 31 dari 39
1 putaran 1.5 putaran h (cm) Vol (mL) t (s) h (cm) Vol (mL) t (s)
20 12346 0 16 9876.8 0 21 12963.3 38 18 11111.4 6 22 13580.6 76 20 12346 13 23 14197.9 114 22 13580.6 18 24 14815.2 151 24 14815.2 24 25 15432.5 188 26 16049.8 31 26 16049.8 224 28 17284.4 37 27 16667.1 263 30 18519 44 28 17284.4 298 32 19753.6 50 29 17901.7 334 34 20988.2 57
Kurva kalibrasi debit bukaan valve saat bukaan 1 dan 1,5 putaran ditunjukkan
pada grafik berikut:
Kalibrasi Valve 3. 1 putaran
y = 16.62x + 12322R2 = 0.9999
10000110001200013000140001500016000170001800019000
0 100 200 300 400t (s)
Vol (
mL)
Kalibrasi Valve 3. 1,5 putaran
y = 195.73x + 9952.1R2 = 0.9993
7500
10000
12500
15000
17500
20000
22500
0 10 20 30 40 50 60t (s)
Vol (
mL)

Panduan Pelaksanaan Laboratorium Instruksional I/II
Departemen Teknik Kimia ITB
Modul 1.12 Dinamika Proses Halaman 32 dari 39
V.4.3 Penentuan Harga k dan n
Harga k dan n didapat dari hasil linearisasi persamaan:
−=
−=
Aklnn.lnh
dtdhln
hAk
dtdh n
dh/dt dicari dari regresi nonlinear grafik h terhadap t dengan memasukkan nilai t
sebagai variabel bebas. Hasil integrasi persamaan tersebut adalah garis lurus
dengan intersep
−
Akln dengan gradien n. Untuk mendapatkan data-data yang
dibutuhkan dalam perhitungan ini dilakukan simulasi pengosongan tangki.
Misalkan data praktikum simulasi pengosongan tangki adalah sebagai berikut:
Bukaan Valve : 1 putaran
t (s) h (cm) dh/dt A.-dh/dt ln (-Adh/dt) lnh 0 54.5 -0.196 120.9908 4.79571451 3.9982007
10 52.5 -0.192 118.5216 4.775095222 3.9608132 20 50.5 -0.188 116.0524 4.754041813 3.9219733 31 48.5 -0.1836 113.33628 4.730359329 3.8815638 42 46.5 -0.1792 110.62016 4.706102351 3.8394523 54 44.5 -0.1744 107.65712 4.678951362 3.7954892 65 42.5 -0.17 104.941 4.653398287 3.7495041 77 40.5 -0.1652 101.97796 4.624756712 3.701302 89 38.5 -0.1604 99.01492 4.595270546 3.6506582
101 36.5 -0.1556 96.05188 4.564888462 3.5973123 112 34.5 -0.1512 93.33576 4.536203314 3.5409593 165 26.5 -0.13 80.249 4.385134301 3.2771447 179 24.5 -0.1244 76.79212 4.341102031 3.1986731 193 22.5 -0.1188 73.33524 4.295041257 3.1135153 209 20.5 -0.1124 69.38452 4.239663788 3.0204249 224 18.5 -0.1064 65.68072 4.184805427 2.9177707 242 16.5 -0.0992 61.23616 4.114737865 2.8033604 259 14.5 -0.0924 57.03852 4.043726829 2.6741486 277 12.5 -0.0852 52.59396 3.962601284 2.5257286 298 10.5 -0.0768 47.40864 3.858804491 2.3513753
dh/dt didapat dengan membuat grafik h terhadap t dan mencari persamaan
numerik h sebagai fungsi t. Dari persamaan h = h(t) tersebut dihitung dh/dt.
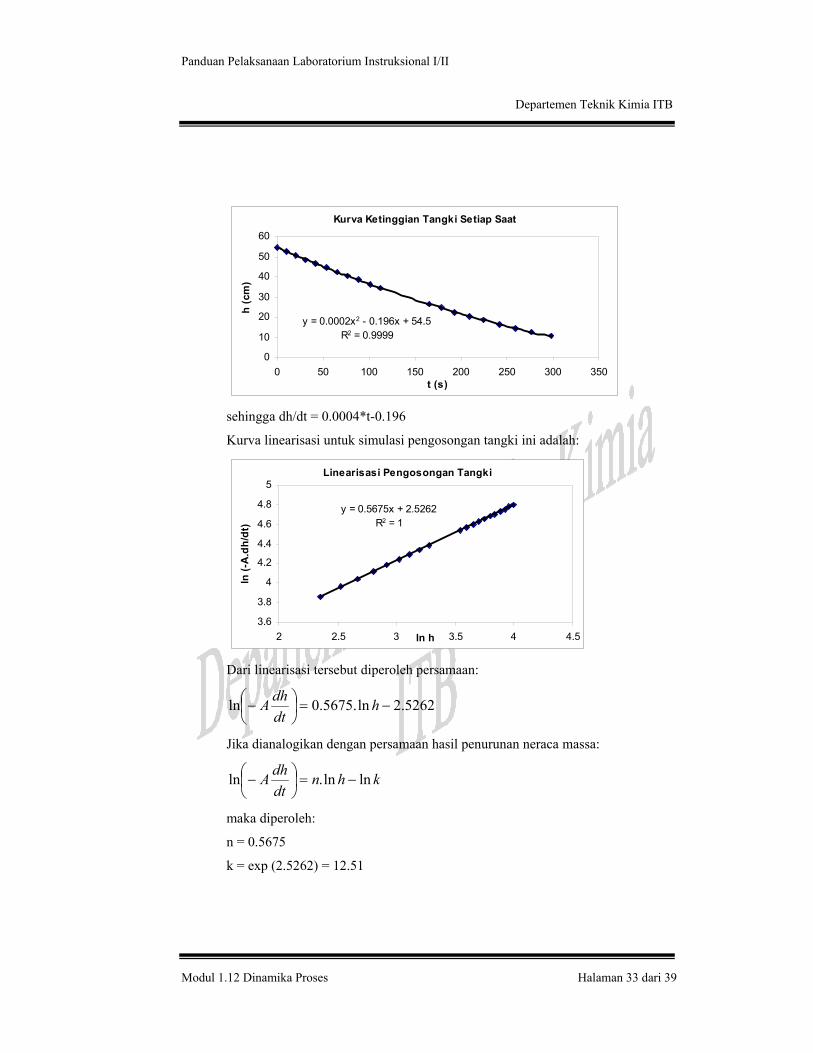
Hubungan h dan t dari data percobaan tersebut disajikan pada grafik berikut:
Panduan Pelaksanaan Laboratorium Instruksional I/II
Departemen Teknik Kimia ITB
Modul 1.12 Dinamika Proses Halaman 33 dari 39
Kurva Ketinggian Tangki Setiap Saat
y = 0.0002x2 - 0.196x + 54.5R2 = 0.9999
0
10
20
30
40
50
60
0 50 100 150 200 250 300 350t (s)
h (c
m)
sehingga dh/dt = 0.0004*t-0.196
Kurva linearisasi untuk simulasi pengosongan tangki ini adalah:
Linearisasi Pengosongan Tangki
y = 0.5675x + 2.5262R2 = 1
3.6
3.8
4
4.2
4.4
4.6
4.8
5
2 2.5 3 3.5 4 4.5ln h
ln (-
A.d
h/dt
)
Dari linearisasi tersebut diperoleh persamaan:
5262.2ln.5675.0ln −=
− h
dtdhA
Jika dianalogikan dengan persamaan hasil penurunan neraca massa:
khndtdhA lnln.ln −=
−
maka diperoleh:
n = 0.5675
k = exp (2.5262) = 12.51
Panduan Pelaksanaan Laboratorium Instruksional I/II
Departemen Teknik Kimia ITB
Modul 1.12 Dinamika Proses Halaman 34 dari 39
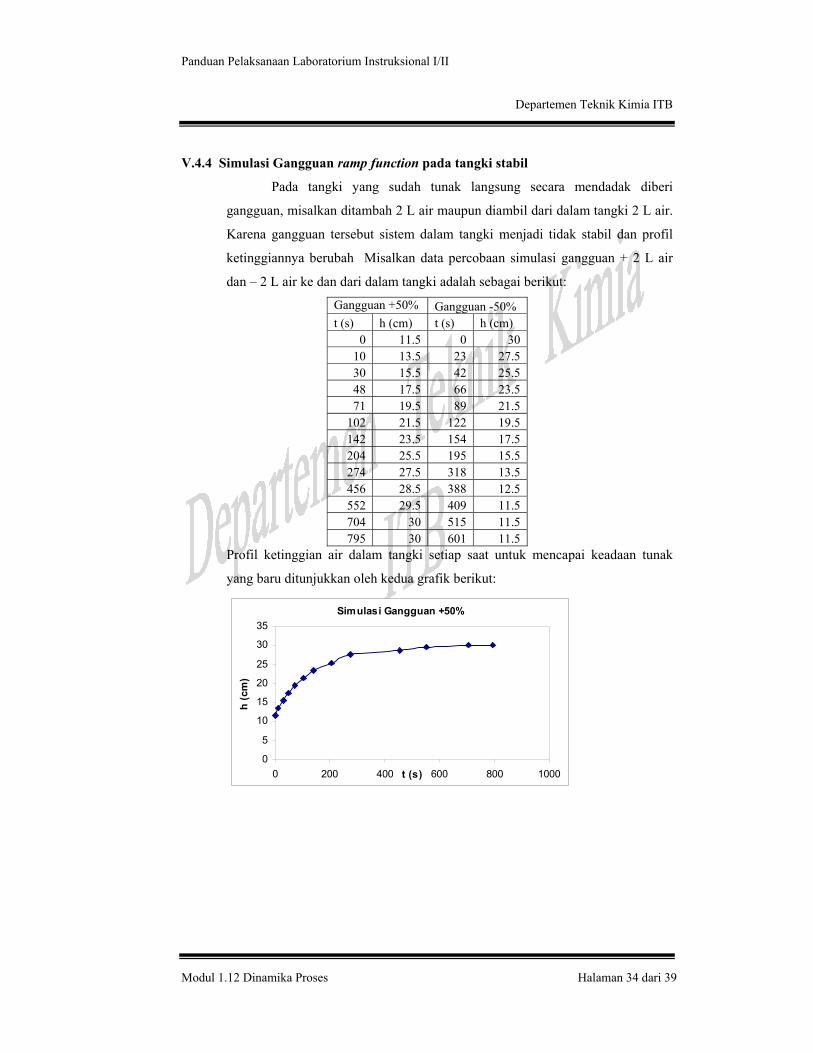
V.4.4 Simulasi Gangguan ramp function pada tangki stabil
Pada tangki yang sudah tunak langsung secara mendadak diberi
gangguan, misalkan ditambah 2 L air maupun diambil dari dalam tangki 2 L air.
Karena gangguan tersebut sistem dalam tangki menjadi tidak stabil dan profil
ketinggiannya berubah Misalkan data percobaan simulasi gangguan + 2 L air
dan – 2 L air ke dan dari dalam tangki adalah sebagai berikut:
Gangguan +50% Gangguan -50% t (s) h (cm) t (s) h (cm)
0 11.5 0 30 10 13.5 23 27.5 30 15.5 42 25.5 48 17.5 66 23.5 71 19.5 89 21.5
102 21.5 122 19.5 142 23.5 154 17.5 204 25.5 195 15.5 274 27.5 318 13.5 456 28.5 388 12.5 552 29.5 409 11.5 704 30 515 11.5 795 30 601 11.5
Profil ketinggian air dalam tangki setiap saat untuk mencapai keadaan tunak
yang baru ditunjukkan oleh kedua grafik berikut:
Simulasi Gangguan +50%
0
5
10
15
20
25
30
35
0 200 400 600 800 1000t (s)
h (c
m)
Panduan Pelaksanaan Laboratorium Instruksional I/II
Departemen Teknik Kimia ITB
Modul 1.12 Dinamika Proses Halaman 35 dari 39
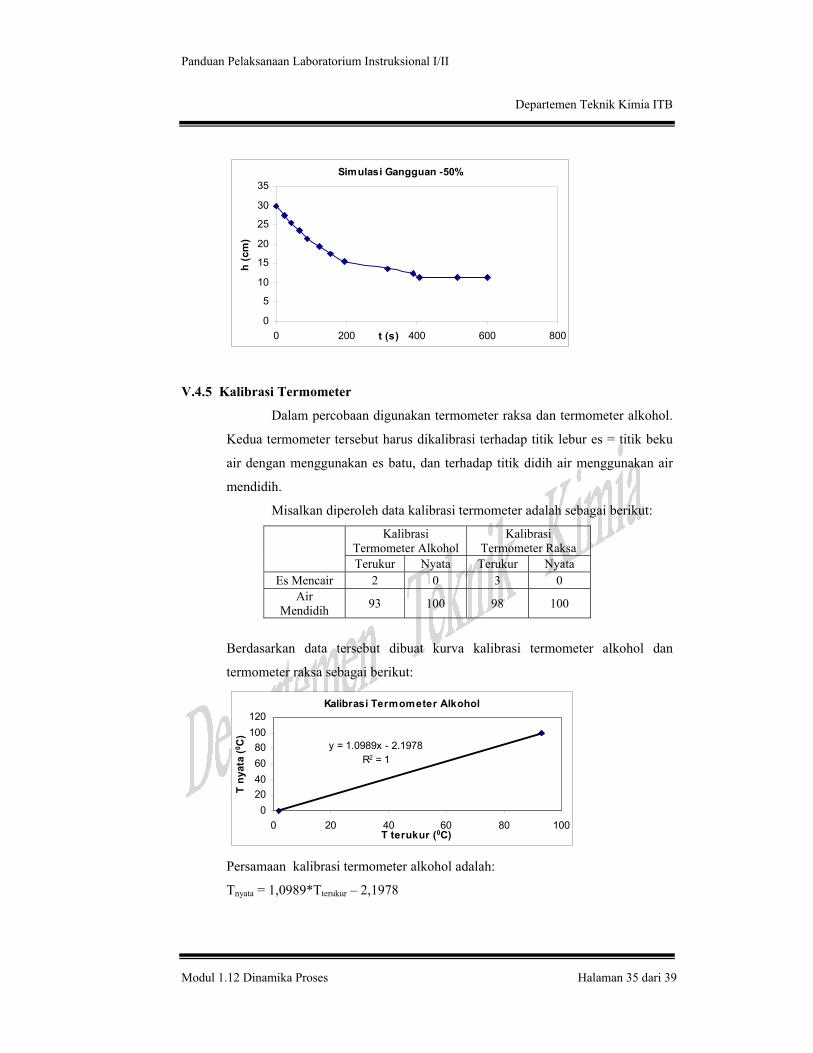
Simulasi Gangguan -50%
0
5
10
15
20
25
30
35
0 200 400 600 800t (s)
h (c
m)
V.4.5 Kalibrasi Termometer
Dalam percobaan digunakan termometer raksa dan termometer alkohol.
Kedua termometer tersebut harus dikalibrasi terhadap titik lebur es = titik beku
air dengan menggunakan es batu, dan terhadap titik didih air menggunakan air
mendidih.
Misalkan diperoleh data kalibrasi termometer adalah sebagai berikut:
Kalibrasi Termometer Alkohol
Kalibrasi Termometer Raksa
Terukur Nyata Terukur Nyata Es Mencair 2 0 3 0
Air Mendidih 93 100 98 100
Berdasarkan data tersebut dibuat kurva kalibrasi termometer alkohol dan
termometer raksa sebagai berikut:
Kalibrasi Termometer Alkohol
y = 1.0989x - 2.1978R2 = 1
020406080
100120
0 20 40 60 80 100T terukur (0C)
T ny
ata
(0 C)
Persamaan kalibrasi termometer alkohol adalah:
Tnyata = 1,0989*Tterukur – 2,1978
Panduan Pelaksanaan Laboratorium Instruksional I/II
Departemen Teknik Kimia ITB
Modul 1.12 Dinamika Proses Halaman 36 dari 39
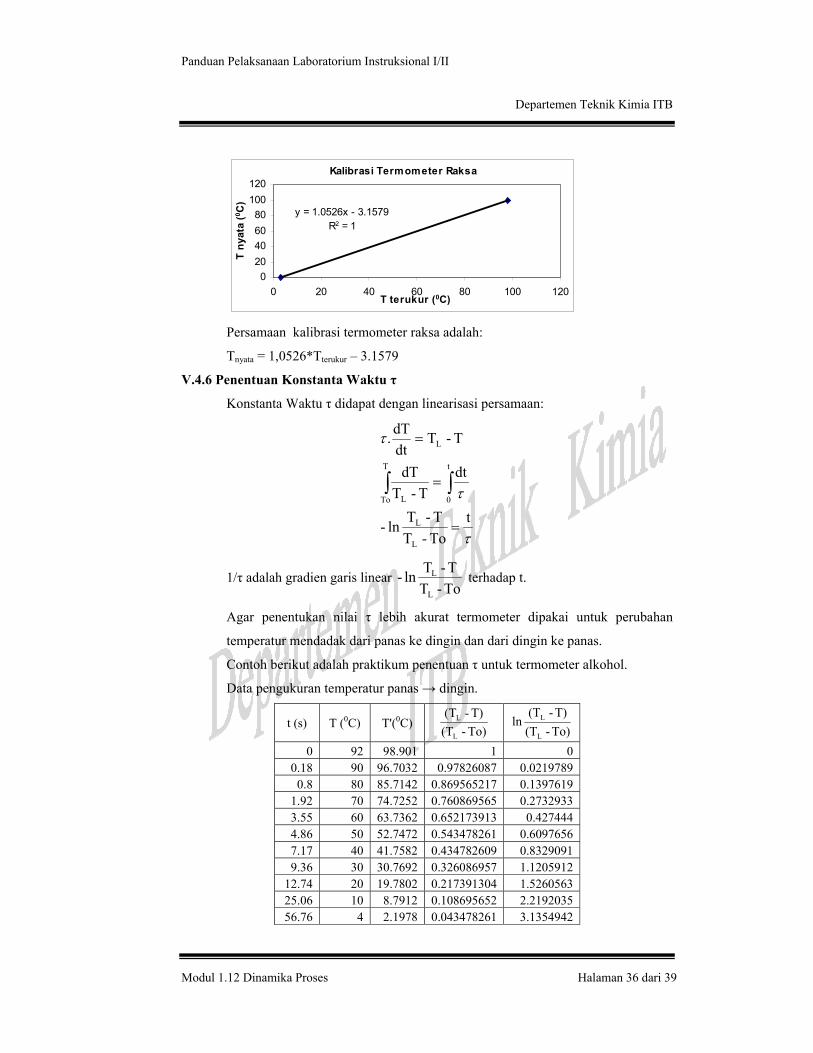
Kalibrasi Termometer Raksa
y = 1.0526x - 3.1579R2 = 1
020406080
100120
0 20 40 60 80 100 120T terukur (0C)
T ny
ata
(0 C)
Persamaan kalibrasi termometer raksa adalah:
Tnyata = 1,0526*Tterukur – 3.1579
V.4.6 Penentuan Konstanta Waktu τ
Konstanta Waktu τ didapat dengan linearisasi persamaan:
τ
τ
τ
tTo-TT-Tln-
dtT-T
dT
T-TdtdT.
L
L
t
0
T
To L
L
=
=
=
∫∫
1/τ adalah gradien garis linear To-TT-Tln-
L
L terhadap t.
Agar penentukan nilai τ lebih akurat termometer dipakai untuk perubahan
temperatur mendadak dari panas ke dingin dan dari dingin ke panas.
Contoh berikut adalah praktikum penentuan τ untuk termometer alkohol.
Data pengukuran temperatur panas → dingin.
t (s) T (0C) T'(0C) To)-(TT)-(T
L
L To)-(TT)-(T
lnL
L
0 92 98.901 1 0 0.18 90 96.7032 0.97826087 0.0219789
0.8 80 85.7142 0.869565217 0.1397619 1.92 70 74.7252 0.760869565 0.2732933 3.55 60 63.7362 0.652173913 0.427444 4.86 50 52.7472 0.543478261 0.6097656 7.17 40 41.7582 0.434782609 0.8329091 9.36 30 30.7692 0.326086957 1.1205912
12.74 20 19.7802 0.217391304 1.5260563 25.06 10 8.7912 0.108695652 2.2192035 56.76 4 2.1978 0.043478261 3.1354942
Panduan Pelaksanaan Laboratorium Instruksional I/II
Departemen Teknik Kimia ITB
Modul 1.12 Dinamika Proses Halaman 37 dari 39
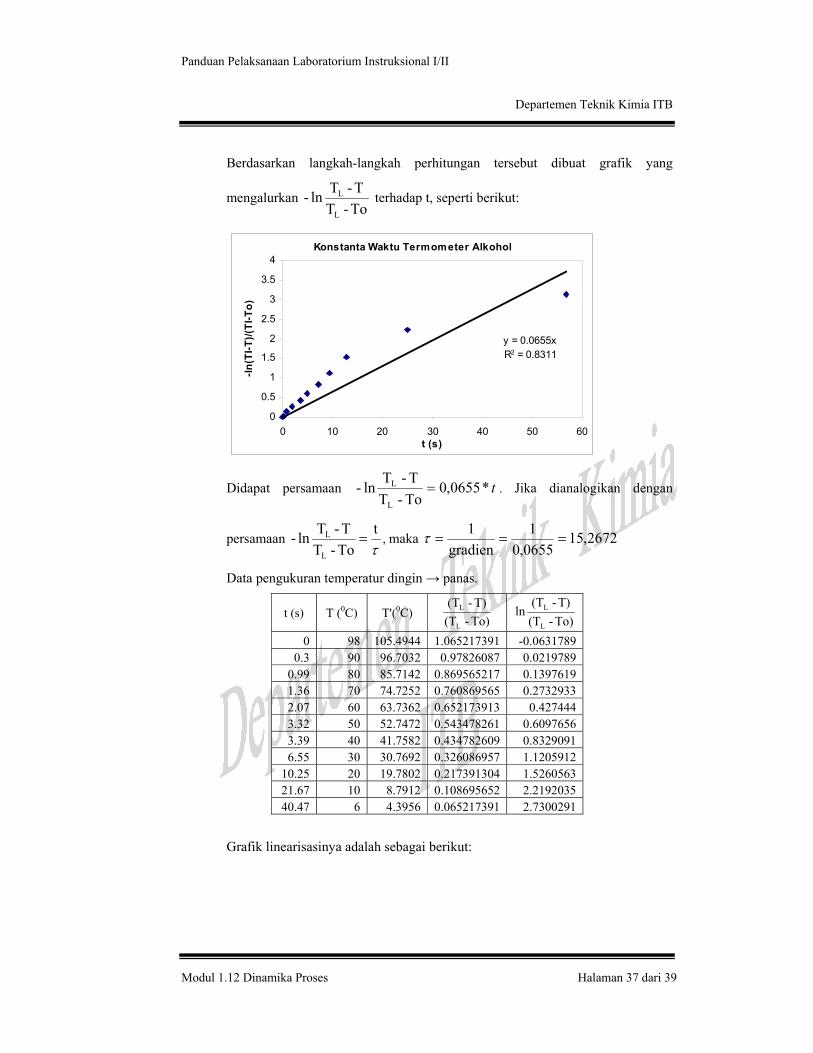
Berdasarkan langkah-langkah perhitungan tersebut dibuat grafik yang
mengalurkan To-TT-Tln-
L
L terhadap t, seperti berikut:
Konstanta Waktu Termometer Alkohol
y = 0.0655xR2 = 0.8311
0
0.5
1
1.5
2
2.5
3
3.5
4
0 10 20 30 40 50 60t (s)
-ln(T
l-T)/(
Tl-T
o)
Didapat persamaan t*0655,0To-TT-T
ln-L
L = . Jika dianalogikan dengan
persamaan τt
To-TT-Tln-
L
L = , maka 2672,150655,01
gradien1
===τ
Data pengukuran temperatur dingin → panas.
t (s) T (0C) T'(0C) To)-(TT)-(T
L
L To)-(TT)-(T
lnL
L
0 98 105.4944 1.065217391 -0.0631789 0.3 90 96.7032 0.97826087 0.0219789
0.99 80 85.7142 0.869565217 0.1397619 1.36 70 74.7252 0.760869565 0.2732933 2.07 60 63.7362 0.652173913 0.427444 3.32 50 52.7472 0.543478261 0.6097656 3.39 40 41.7582 0.434782609 0.8329091 6.55 30 30.7692 0.326086957 1.1205912
10.25 20 19.7802 0.217391304 1.5260563 21.67 10 8.7912 0.108695652 2.2192035 40.47 6 4.3956 0.065217391 2.7300291
Grafik linearisasinya adalah sebagai berikut:
Panduan Pelaksanaan Laboratorium Instruksional I/II
Departemen Teknik Kimia ITB
Modul 1.12 Dinamika Proses Halaman 38 dari 39
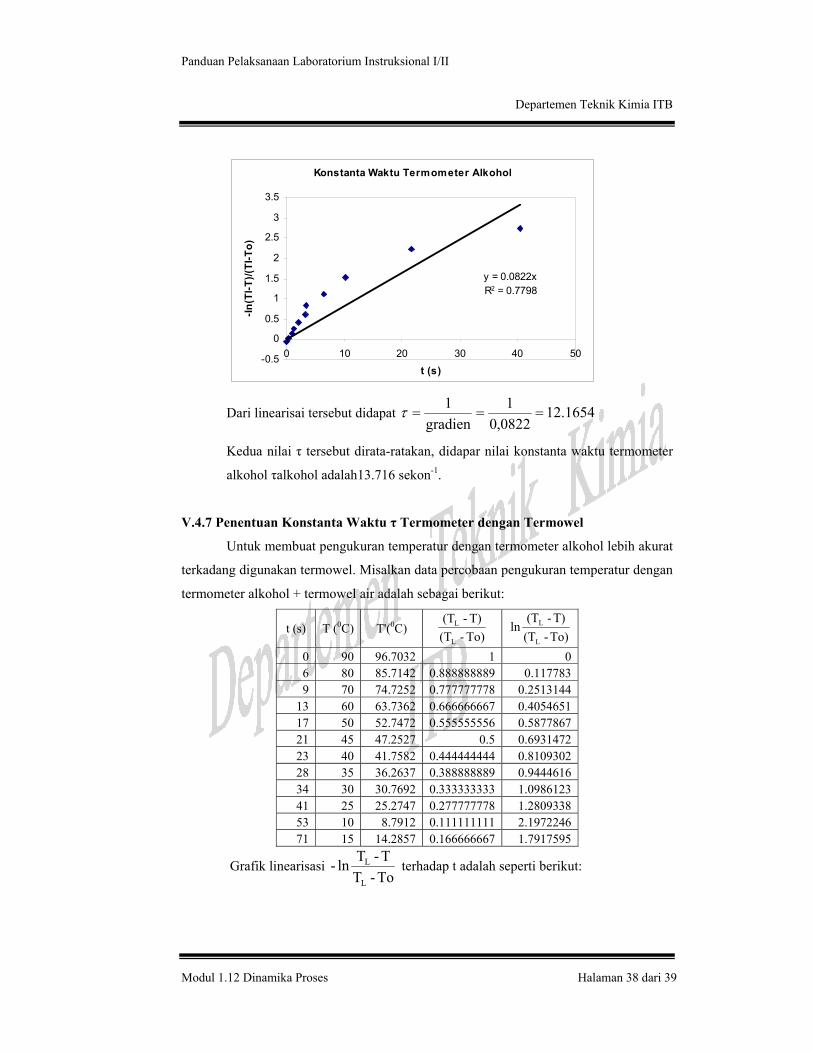
Konstanta Waktu Termometer Alkohol
y = 0.0822xR2 = 0.7798
-0.5
0
0.5
1
1.5
2
2.5
3
3.5
0 10 20 30 40 50
t (s)
-ln(T
l-T)/(
Tl-T
o)
Dari linearisai tersebut didapat 1654.120822,01
gradien1
===τ
Kedua nilai τ tersebut dirata-ratakan, didapar nilai konstanta waktu termometer
alkohol τalkohol adalah13.716 sekon-1.
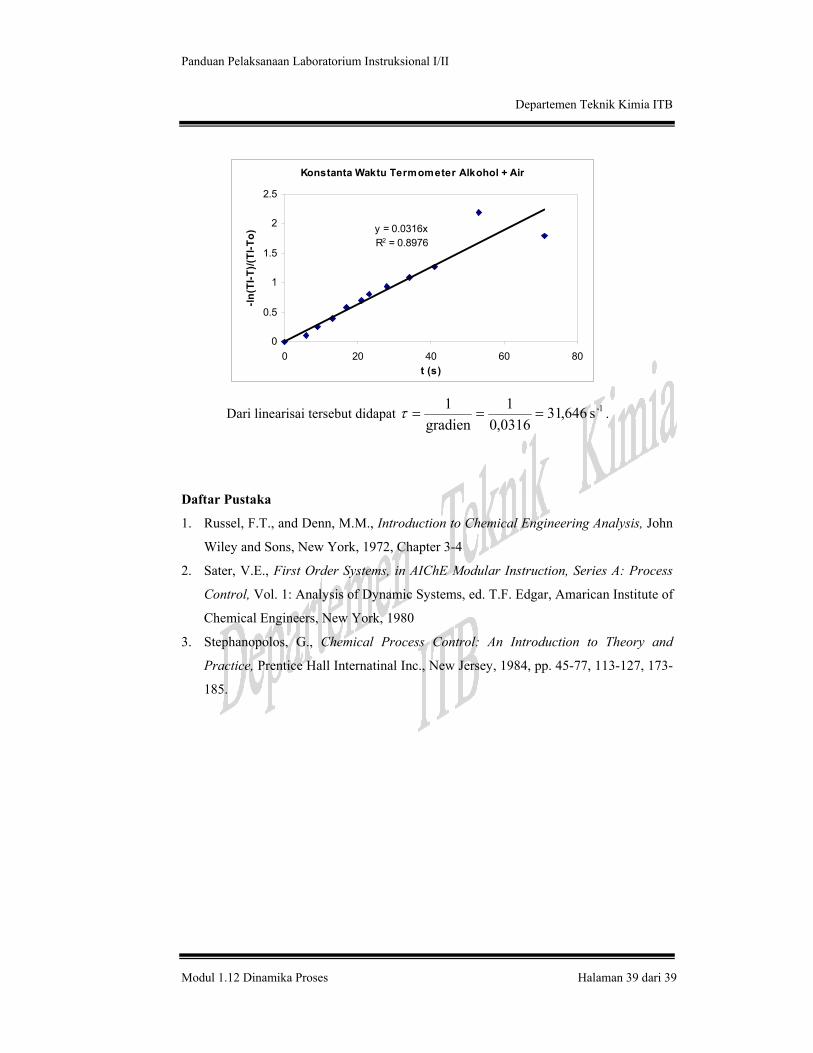
V.4.7 Penentuan Konstanta Waktu τ Termometer dengan Termowel
Untuk membuat pengukuran temperatur dengan termometer alkohol lebih akurat
terkadang digunakan termowel. Misalkan data percobaan pengukuran temperatur dengan
termometer alkohol + termowel air adalah sebagai berikut:
t (s) T (0C) T'(0C) To)-(TT)-(T
L
L To)-(TT)-(T
lnL
L
0 90 96.7032 1 0 6 80 85.7142 0.888888889 0.117783 9 70 74.7252 0.777777778 0.2513144
13 60 63.7362 0.666666667 0.4054651 17 50 52.7472 0.555555556 0.5877867 21 45 47.2527 0.5 0.6931472 23 40 41.7582 0.444444444 0.8109302 28 35 36.2637 0.388888889 0.9444616 34 30 30.7692 0.333333333 1.0986123 41 25 25.2747 0.277777778 1.2809338 53 10 8.7912 0.111111111 2.1972246 71 15 14.2857 0.166666667 1.7917595
Grafik linearisasi To-TT-Tln-
L
L terhadap t adalah seperti berikut:
Panduan Pelaksanaan Laboratorium Instruksional I/II
Departemen Teknik Kimia ITB
Modul 1.12 Dinamika Proses Halaman 39 dari 39
Konstanta Waktu Termometer Alkohol + Air
y = 0.0316xR2 = 0.8976
0
0.5
1
1.5
2
2.5
0 20 40 60 80t (s)
-ln(T
l-T)/(
Tl-T
o)
Dari linearisai tersebut didapat 1-s 646,310316,01
gradien1
===τ .
Daftar Pustaka
1. Russel, F.T., and Denn, M.M., Introduction to Chemical Engineering Analysis, John
Wiley and Sons, New York, 1972, Chapter 3-4
2. Sater, V.E., First Order Systems, in AIChE Modular Instruction, Series A: Process
Control, Vol. 1: Analysis of Dynamic Systems, ed. T.F. Edgar, Amarican Institute of
Chemical Engineers, New York, 1980
3. Stephanopolos, G., Chemical Process Control: An Introduction to Theory and
Practice, Prentice Hall Internatinal Inc., New Jersey, 1984, pp. 45-77, 113-127, 173-
185.