model linear dan aljabar matriks
TRANSCRIPT
MODEL LINEAR DAN ALJABAR MATRIKS
Kegunaan Aljabar Matriks:1. Memberikan suatu cara penulisan sistem persamaan yang ringkas, walaupun
persamaannya luas.2. Memberikan petunjuk mengenai cara ppengujian suatu pemecahan yang ada melalui
penaksiran determinan.3. Memberikan cara untuk mendapatkan pemecahan tersebut.
Permasalahan dalam sistem persamaan:1. Analisis statis (static analysis)2. Analisis komparatif (comparative analysis)3. Analisis dinamis (dynamic analysis)4. Masalah optimisasi (optimization problems)
Aljabar matriks hanya dapat diterapkan pada sistem linear, persamaan linear yang realistis dapat menggambarkan hubungan ekonomi yang sebenarnya, tergantung pada sifat hubungan tersebut. Realitas yang yang dibatasi denagn diasumsikannya linearitas, hubungan linear yang diasumsikan ini dapat menghasilkan aproksimasi yang cukup aktual terhadap hubungan yang non-linear.
Dalam kasus lain, dengan tetap menggunakan model non-linear, dapat dilakukan perubahan variabel agar didapatkan hubungan linear.
y = axb
dengan mengalikan logaritma dalam fungsi tersebut:log y = log a + log b
4.1 MATRIKS VEKTOR
c1P1 + c2P2 = -c0
γ1P1 + γ2P2 = -γ0
dapat ditulisa11x1 + a12x2 + …. + a1nxn = d1
a21x1 + a22x2 + …. + a2nxn = d2
………………………………am1x1 + am2x2 + …. + amnxn = dm
Parameter dengan simbol ganda yang menjadi tikalas (subskrip) aij menunjukkan koefisien dalam persamaan ke-i yang terikat pada variabel j. di yang tidak terikat apapun menunjukkan konstanta dalam persamaan ke-i. Semua tikalas (subskrip) menunjukkan lokasi tertentu dari variabel dan parameter.
Matriks sebagai Susunan (Array)3 jenis persamaan bahan pokok:1. Himpunan koefisien aij
2. Himpunan variabel x1, ……, xn
3. Himpunan konstanta d1, ….., dm

Dapat disusun :
A = [ a11a 12 …a 1na 21 a 22 …a 2n………………
am1 am 2… amn] x = [ x1
x2…xn
] d = [d1d2…dn
]Contoh :6x1 + 3x2 + x3 = 22 x1 + 4x2 – 2x3 = 124x1 – x2 + 5x3 = 10 Dapat ditulis:
A = [6 3 11 4 −24 −1 5 ] x = [ x1
x2x3] d = [22
1210]
Matriks didefinisikan sebagai array segi empat dari bilangan, parameter, atau variabel. Anggota dari susunan tersebut, yang disebut elemen matriks, biasanya dibatasi dengan tanda: [ ](tanda kurung siku atau bracket), () (tanda kurung atau parentheses), ‖‖ (garis sejajar). Dalam matriks A (matriks koefisien dalam sistem persamaan), elemen-elemennya dipisah bukan dengan tanda koma, tetapi dengan spasi kosong.
Vektor sebagai Matriks KhususJumlah baris dan kolom dalam suatu matriks membentuk dimensi suatu matriks.
Matriks A memiliki m baris dan n kolom, maka matriks tersebut dikatakan mempunyai dimensi m× n. Jumlah baris dinyatakan terlebih dahulu daripada jumlah kolom. Dalam kasus dimana m=n, matriksnya disebut matriks kuadrat (square matrix); jadi matriks A adalah matriks kuadrat 3 × 3.
Matriks yang memiliki 1 kolom saja disebut vector kolom. Dimensi x adalah n×1, dimensi d adalah m×1. Dalam susunan horizontal, matriks 1×n disebut vector baris. Matriks dalam menjelaskan sistem persamaan dalam cara yang lebih ringkas. Dapat dinyatakan dengan: Ax = d
4.2 OPERASI DENGAN MATRIKS Dua matriks A = [aij] dan B = [bij] dikatakan sama jika keduanya mempunyai
dimensi serta elemen yang identik dalam susunan lokasi yang sama. A = B jika dan hanya jika aij = bij untuk seluruh nilai i dan j.Contoh:
[4 32 0] = [4 3
2 0] ≠ [2 04 3]
[ xy ] = [74 ], berarti bahwa x = 7 dan y = 4
Penjumlahan dan Pengurangan Matriks

Dua matriks yang dapat dijumlahkan jika dan hanya jika keduanya memiliki kesamaan dimensi. Jika dimensinya sama , maka kedua matriks ini dikatakan telah memenuhi syarat untuk dijumlahkan. Penjumlahan A = [aij] dan B = [bij] didefinisikan sebagi penjumlahan dari setiap pasang elemen yang berpadanan.Contoh:
[4 92 1] + [2 0
0 7 ] = [4+2 9+02+0 1+7 ] = [6 9
2 8]Secara umum aturannya adalah [aij] + [bij] = [cij].
Operasi pengurangan A – B dapat didefinisikan dengan cara yang serupa.[aij] - [bij] = [dij]Contoh:
[19 32 0 ] - [6 8
1 3] = [13 −51 −3 ]
Perkalian Skalar (Scalar Multiplication)Mengalikan suatu matriks dengan bilangan (dalam istilah aljabar matriks disebut skalar) diartikan sebagai mengalikan setiap elemen dari matriks dengan skalar yang diberikan. Contoh:
7[3 −10 5 ] = [21 −7
0 35 ]Penggunaan skalar yaitu untuk memperbesar atau mengecilkan elemen matriks dengan pengali tertentu. Skalar juga bisa juga berupa bilangan negative.
Perkalian MatriksSuatu bilangan atau skalar dapat digunakan untuk mengalikan suatu matriks tanpa menghiraukan seberapa besar dimensi matriks tersebut, sedangkan perkalian dua matriks tergantung dari dipenuhi atau tidaknya persyaratan dimensi kedua matriks.Contoh:
A = [1 32 84 0] dan B = [59]
AB = [1 (5 )+3(9)2 (5 )+8(9)4 (5 )+0 (9 ) ] = [32
8220]
Y = C + I0 + G0
C = a + bY
Dapat disusun kembali dalam bentuk standarY−C=I 0+G0
−bY +C=a
Jika matriks koefisien A, vektor variabel x, dan vektor konstanta d adalah

A=[ 1 −1−b 1 ] x=[YC ]d=[I 0+G0
a ]Ax=[ 1 −1
−b 1 ][YC ]=[1 (Y )+(−1)(C)−b (Y )+1(C ) ]=[ Y−C
−bY +C ]Jadi persamaan matriks Ax=d
[ Y−C−bY +C ]=[I 0+G0
a ] Permasalah dalam Membagi
Kita tidak dapat menulis A/B karena untuk dua bilangan a dan b (dengan b ≠0) dapat ditulis dengan cara lain sebagai ab-1 atau b-1a, dimana b-1 menunjukkan inverse atau kebalikan dari b. Hal ini berbeda dari matriks. Dengan menerapkan konsep matriks inverse dalam kasus tertentu, kita dapat menetapkan matriks B-1 yang merupakan kebalikan dari matriks B. Hasil perkalian AB-1 atau B-1A tidak akan menunjukkan hasil yang sama.
Penyimpangan cara Penulisan ∑Penjumlahan yang ditulis secara singkat dapat menggunakan huruf Yunani ∑ (sigma, yang berarti “jumlah”) Contoh:
x1+ x2+x3=∑j=1
3
x j
Simbol j disebut indeks penjumlahan (summation index) hanya menggunakan bilangan bulat. Simbol xj menunjukkan besaran yang akan dijumlahkan, dan merupakan fungsi j.
Contoh:
∑j=1
3
ax j=ax1+ax2+ax3=a ( x1+ x2+x3 )=a∑j=1
3
x j
4.3 CATATAN MENGENAI OPERASI VEKTOR Perkalian Vektor
Suatu vektor kolom u dengan dimensi m ×1 dan vektor baris v’ dengan dimensi 1 ×n, akan menghasilkan hasil-kali matriks uv’ dengan dimensi m ×n.Contoh:
u=[32]dan v'= [1 4 5 ]

u v '=[3(1) 3(4) 3 (5)2(1) 2(4) 2 (5)]=[3 12 15
2 8 10]Karerna setiap baris dalam u hanya terdiri satu elemen, sebagaimana setiap kolom dalam v’, maka setiap elemen uv’ ternyata hanya memiliki satu perkalian.
Contoh:
u=[3 4 ] dan v=[97]u' v= [3 (9 )+4 (7)]=[ 55 ]
Matriks diatas merupakan matriks satu elemen (matriks 1 ×1) yang menyerupai bilangan konstan atau skalar terhadap penambahan dan perkalian. Selain itu, matriks1 ×1 tidak mempunyai sifat utama yang juga tidak dimiliki oleh bilangan konstan (scalar).
u' u=[ 3 6 9 ] [369]=(3)2+(6)2+(9)2
Interpretasi Geometris dari Operasi VektorVektor baris dengan n elemen (n-vektor) dapat ditinjau sebagai tuple-n, dan karena itu merupakan merupakan sebuah titik dalam ruang dimensi n (ruang-n).Dari sebuah titik (3,2) digambarkan dalam ruang-2 dan diberi tanda u. Ini bentuk
geometris dari u=[32] atau vektor u'=[ 32 ] ,keduanya dalam hal ini menunjukkan pasangan
urut yang sama. Bila garis dengan tanda panah digambar dari titik asal (0,0), dengan panjang arah tertentu dan arah tertentu disebut vektor radius. Mengikuti penafsiran baru mengenai vektor ini, akan memungkinkan untuk memberikan suatu pengertian ilmu ukur terhadap (a)perkalian bilangan konstan terhadap suatu vektor, (b) penjumlahan dan pengurangan suatu vektor dan (c) kombinasi “linear” dari sebuah vektor.
Pertama, bila kita gambarkan vektor [64 ]=2 u dalam gambar 4.3a, hasilnya berupa
garis dengan tanda panah yang tumpang tindih pada garis yang lama tetapi dengan garis yang dua kali lebih panjang. Dalam kenyataannya perkalian vektor u dengan bilangan konstan k akan menghasilkan garis baru yang tumpang tindih pada garis yang sama, tetapi ujung panah akan berpindah, kecuali jika k=1. Bila pengali multiplier) konstanta adalah k>1, panahnya akan melewati garis yang lama;bila0<k<1 panahnya akan lebih pendek; sedangkan bila k=0 maka garis akan mengerut ke dalam titik asal yang
menunjukkan vektor nol [00]. Suatu pengali konstan yang negatif akan mengubah arah
panah.
Sebagai contoh, bila vektor u dikalikan dengan -1, kita peroleh −u=[−3−2] dan tampak
dalam gambar b sebagai garis dengan tanda panah yang sama panjangnya dengan u tetapi digambar dengan berlawanan.

Selanjutnya penjumlahan vektor, v=[ 14]dan u=[32]. Jumlah v+u=[46] digambar
dengan garis putus-putus (c). Jumlah suatu vektor dapat diperoleh secara ilmu ukur dari suatu jajaran genjang. Selanjutnya, cara ini juga dapat memberikan selisih vektor (vector difference)v-u, karena hal ini sama dengan jumlah (sum) dan (-1)u.
Ketidakbebasan LinearSuatu himpunan vektor v1 , …… .. , vn dikatakan sebagai tidak bebas secara linear (linearly dependent) jika salah satu diantaranya dapat dinyatakan sebagai kombinasi linear dan vektor sisanya; jika tidak, dikatakan sebagai bebas secara linear (linearly independent). Contoh:
v1=[27] , v2=[18] , dan v3=[ 45] tidak bebas secara linear karena v3 merupakan kombinasi
linear dari v1 dan v2.
3 v1−2 v2=[ 621]−[ 2
16]=[45]=v3
Dapat dinyatakan dalam bentuk:3 v1−2 v2−v3=0
Dimana 0=[00] menunjukkan vektor nol (vektor kosong).
Contoh:v ' 1=[5 12 ] dan v '2=[ 10 24 ] tidak bebas secara linear karena
2 v '1=2 [ 5 12 ]= [10 24 ]=v '2
Dapat ditulis dalam bentuk:2 v '1−v ' 2=0 dimana 0’ menunjukkan vektor baris [ 0 0 ]. Suatu himpuanan m vektor v1 , …… .. , vn dikatakan tidak bebas secara linear (linearly dependent) jika dan hanya jika terdapat himpunan skalar k 1 , …… .. , kn (tidak semuanya nol) sehingga
∑i=1
n
k i v i=0
Sebaliknya, jika persamaan ini dapat dipenuhi hanya jika ki = 0 untuk semua i , maka vektor ini bebas secara linear (linearly independent).Konsep tidak bebas secar linear juga dapat diterapkan denagn mudah dalam interpretasi geometris. Dua vektor, u dan 2u jelas tidak bebas. Secara geometris gambar a panahnya terletak pada satu garis lurus. Hal yang sama juga berlaku untuk u dan –u dalam gambar b. vektor u dan v dalam gambar c bebas secara linear, karena tidak mungkin menyatakan yang satu sebagai perkalian dari yang lain. Secara geometris , garisnya tidak terletak pada satu garis lurus. Jika ditentukan lebih dari ruang 2, maka sekali kita menemukan dua vektor yang bebas secara linear dalam ruang-2, maka semua vektor lainnya dalam ruang itu akan dinyatakan sebagai kombinasi linear.
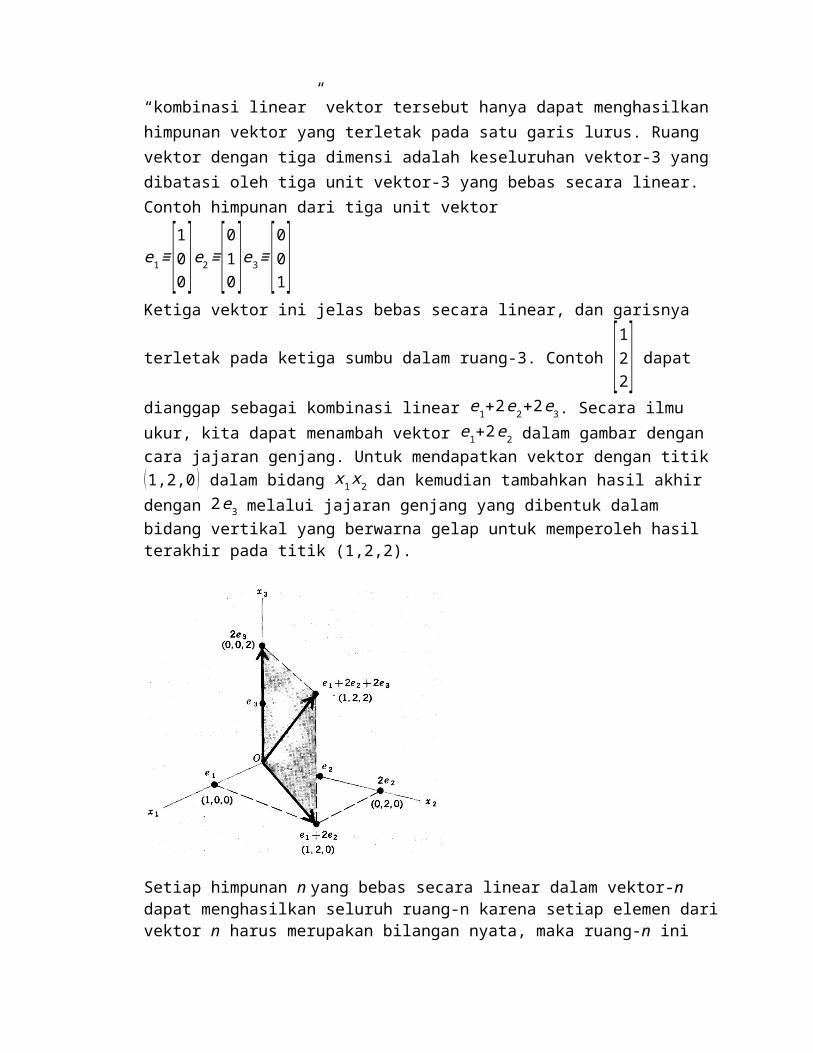
Ruang VektorKeseluruhan vektor-2 yang dihasilkan oleh bermacam-macam kombinasi linear dari dua vektor bebas dari u dan v merupakan ruang vektor yang berdimensi dua. Suatu ruang-2 tidak dapat dihasilkan oleh sebuah vektor-2 tunggal karena “kombinasi linear” vektor tersebut hanya dapat menghasilkan himpunan vektor yang terletak pada satu garis lurus. Ruang vektor dengan tiga dimensi adalah keseluruhan vektor-3 yang dibatasi oleh tiga unit vektor-3 yang bebas secara linear. Contoh himpunan dari tiga unit vektor
e1≡[100]e2≡[010] e3 ≡[001 ] Ketiga vektor ini jelas bebas secara linear, dan garisnya terletak pada ketiga sumbu dalam
ruang-3. Contoh [122] dapat dianggap sebagai kombinasi linear e1+2 e2+2 e3. Secara ilmu
ukur, kita dapat menambah vektor e1+2 e2 dalam gambar dengan cara jajaran genjang. Untuk mendapatkan vektor dengan titik (1,2,0 ) dalam bidang x1 x2 dan kemudian tambahkan hasil akhir dengan 2 e3 melalui jajaran genjang yang dibentuk dalam bidang vertikal yang berwarna gelap untuk memperoleh hasil terakhir pada titik (1,2,2).

Setiap himpunan n yang bebas secara linear dalam vektor-n dapat menghasilkan seluruh ruang-n karena setiap elemen dari vektor n harus merupakan bilangan nyata, maka ruang-n ini sebenarnya adalah Rn (Euclidean ruang-n). Untuk menjelaskan konsep ini, akan dibahas mengenai jarak antara dua titik vektor. Untuk setiap pasangan titik vektor u dan v dalam titik tertentu, jarak dari u ke v adalah suatu fungsi nilai nyata dengan sifat sebagai berikut:
1. Jarak u dan v sama, jaraknya nol2. Jika kedua titik berbeda, jarak dari u ke v dan jarak v ke u ditunjukkan oleh bilangan
nyata positif yang sama3. Jarak antara u dan v tidak pernah lebih panjang dari jarak u ke w ditambah jarak dari w ke
u. Bila dinyatakan dalam simbol :d (u , v )=0untuk u≠ vd (u . v )=d ( v , u )>0 untuk u ≠ v
d (u , v ) ≤ d (u ,w )+d ( w ,v ) untuk w ≠ u , v
Sifat terakhir dikenal sebagai ketidaksamaan segitiga (triangular inequality), karena ketiga titik u,v dan w akan membentuk suatu segitiga.
Jika sebuah ruang vektor mempunyai fungsi jarak yang memenuhi ketiga sifat diatas maka disebut ruang matriks. Ruang Euclidean adalah salah satu ruang matriks dengan fungsi jarak yang ditentukan. Fungsi Euclidean :
d (u , v )=√(a1−b1)2+(a2−b2)
2+…+(an−bn)2
Contoh
√(6−3)2+(4−2)2=√32+22=√13
Hasil fungsi Eclidean akan sama dengan hasil dari dalil Phytagoras. Fungsi jarak Euclidean dapat juga dinyatakan dalam bentuk akar kuadrat dari hasil perkalian dua bilangan konstan dari dua vektor.
d (u , v )=√(u−v) '(u−v)
4.4 HUKUM KOMUTATIF, ASOSIATIF, DAN DISTRIBUTIFHukum komutatifdalam penjumlahan: a+b=b+aHukum komutatif dalam perkalian : ab=baHukum asosiatif dalam penjumlahan : (a+b )+c=a+(b+c )Hukum asosiatif dalam perkalian : (ab ) c=a(bc)Hukum distributif : a (b+c )=ab+ac
Penjumlahan MatriksPenjumlahan matriks bersifat komutatif sekaligus asosiatif. Penjumlahan matriks mensyaratkan penjumlahan elemen yang bersesuaian dari dua matriks, dan urutan pasangan elemen yang dijumlahkan tidaklah penting. Hukum Komutatif
A + B = B + AContoh:
A=[3 10 2]dan B=[6 2
3 4 ] A+B=B+ A=[9 3
3 6 ] Hukum Asosiatif
(A + B) + C = A + (B + C)Contoh:
v1=[34 ] , v2=[91] , dan v3=[25]( v1+v2 )−v3=[12
5 ]−[25]=[100 ] sama dengan
v1+( v2−v3 )=[34]+[ 7−4 ]=[10
0 ]Jika diterapkan pada kombinasi linear vektor k 1v1+……+kn vn hukum asosiatif mengizinkan untuk memilih setiap pasang suku untuk dijumlahkan (atau dikurangkan).
Perkalian MatriksPerkalian matriks tidak komutatif, AB≠ BA.Contoh:
A=[1 23 4 ]dan B=[0 −1
6 7 ] maka
AB=[1 (0 )+2(6) 1 (−1 )+2 (7)3 (0 )+4 (6) 3 (−1 )+4(7)]=[12 13
24 25]BA=[0 (1 )−1(3) 0 (2 )−1(4 )
6 (1 )+7(3) 6 (2 )+7 (4 )]=[−3 −427 40 ]
Terdapat pengecualian dalam peraturan AB≠ BA, yaitu jika A berupa matriks kuadrat dan B matriks identitas; A berupa invers dari B A=B−1. Perkalian skalar terhadap matriks adalah mengikuti hukum komutatif, jadi kA=Ak.Hukum Asosiatif
( AB )C=A ( BC )=ABCDalam membentuk perkalian ABC, kondisi yang sesuai harus dipenuhi oleh setiap pasangan matriks yang berdekatan.
Contoh:
x=[x1
x2]d an A=[a11 0
0 a22] maka
x' Ax=x' ( Ax )=[ x1 x2 ] [a11 x1
a22 x2]=a11 x1
2+a22 x22
( x ' A ) x= [a11 x1 a22 x2 ][ x1
x2]=a11 x1
2+a22 x22
Hukum DistributifA (B + C) = AB + AC [yang mengalikan A](B + C) A = BA + CA [yang dikalikan A]
Dalam setiap kasus,, tentu persyaratan kesesuaian dalam penjumlahan maupun perkalian harus dipenuhi.
4.5 MATRIKS IDENTITAS DAN MATRIKS NOL Matriks Identitas (Identity Matrix)
Yaitu matriks kuadrat (square matrix) dengan 1 pada diagonal utamanya dan 0 diposisi lainnya. Biasanya, matriks ini dinyatakan dengan simbol I atau In , subskrip n menunjukkan dimensi baris (maupun kolomnya)
I 2=[1 00 1] I 3=[1 0 0
0 1 00 0 1]
Matriks ini mempunyai peranan yang sama dengan bilangan 1 dalam skala aljabar.AI=IA=A
Contoh:
A=[1 2 32 0 3] maka
IA=[1 00 1 ][1 2 3
2 0 3]=[1 2 32 0 3]=A
AI=[1 2 32 0 3] [1 0 0
0 1 00 0 1]=[1 2 3
2 0 3 ]=A
Suatu kasus yang akan kita peroleh dari IA=AI=A adalah AIn=(I n)
2=I n
Yang menyatakan bahwa matriks identitas kuadrat adalah sama dengan matriks identitas itu sendiri. Secara umum, dari hasil ini adalah
(I n)k=In(k=1,2 ,….)
Suatu matriks identitas tidak akan berubah jika dikali berapa kalipun oleh matriks itu sendiri (Idempotent Matrikx).
Matriks NolMatriks ini berperan sebagai bilangan nol dan mempunyai elemen yang seluruhnya adalah bilangan nol. Matriks ini tidak harus memiliki jumlah baris dan koom yang sama.
Matriks nol mengikuti aturan operasi penjumlahan dan perkalian (dengan syarat penyesuaian)
Contoh:
A+0=[a11 a12
a21 a22]+[0 0
0 0 ]=[a11 a12
a21 a22]=A
A 0=[a11 a12 a13
a21 a22 a23] [000]=[00]
Keistimewaan Aljabar Matriks1. Dalam hal skalar, persamaan ab = 0 menyiratkan bahwa a atau b sama dengan
0, tetapi tidak terjadi dalam matriks.Contoh:
AB=[2 41 2 ][−2 4
1 −2]=[0 00 0 ]=0
Walaupum matriks A dan matriks B bukan 0
2. Persamaan cd = ce (dimana c ≠ 0) secara tidak langsung menyatakan bahwa d=e, tetapi tidak terjadi dalam matriks.
C=[2 36 9]D=[1 1
1 2]E=[−2 13 2]
CD=CE=[ 5 815 24 ]
Meskipun D ≠ EHasil ini hanya terjadi pada segolongan khusus matriks yang dikenal sebagai matriks singular.
4.6 TRANSPOS DAN INVERSJika baris dan kolom suatu matriks saling ditukar-sehingga baris pertam menjadi kolom pertama dan sebaliknya-kita peroleh transpose A yang dinyatakan oleh A' atau AT
Contoh
Diketahui A=[3 8 −91 0 4 ]dan B=[3 4
1 7 ]
Maka A'=[ 3 1
8 0−9 4 ]dan B'=[3 1
4 7]
Contoh C=[9 −12 0 ]dan D=[1 0 4
0 3 74 7 2]
Maka
C '=[ 9 2−1 0]dan D'=[ 1 0 4
0 3 74 7 2]
Di sini dimensi setiap transpose sama dengan matriks asal. Matriks D merupakan matriks kuadrat khusus yang disebut matriks simetris. Contoh lain matriks seperti itu adalah matriks identitas I, yang sebagai matriks simetris mempunyai Transpos I '=I
Sifat-sifat Transpos
( A' )'=A ( A+B )'=A '+B'
( AB )'=B ' A'
1. Transpos dari transpos adalah matriks asalnya2. Transpos dari suatu jumlah adalah jumlah dari masing-masing transpos
Contoh:
A=[4 19 0]dan B=[2 0
7 1]
( A+B )'=[ 6 116 1]
'
=[6 161 1 ]
Dan A'+B'=[ 4 9
1 0]+[2 70 1 ]=[6 16
1 1 ]3. Transpos dari suatu hasil perkalian adalah perkalian dari transpos dalam urutan
yang terbalik (in reverse order). Contoh:
A=[1 23 4 ]dan B=[0 −1
6 7 ]( AB )'=[12 13
24 25]'
=[12 2413 25]
B' A'=[ 0 6−1 7 ][1 3
2 4]=[12 2413 25]
Invers dan Sifat-sifatnyaUntuk sebuah matriks A yang diketahui, transpos A’ selalu dapat diperoleh. Sedangkan matriks inversnya yang juga merupakan turunan dari matriks mungkin dapat atau tidak dapat diperoleh. Invers matriks A, yang ditunjukkan dengan simbol A-1, hanya dapat ditentukan bila A adalah matriks bujursangkar.
Invers adalah matriks yang memenuhi A A−1=A−1 A=IYaitu A dikalikan A-1 ataupun sebaliknya A-1 dikalikan A, kedua hasil perkalian ini merupakan matriks identitas yang sama. Ini merupakan pengecualian terhadap sifat nonkomutatif perkalian matriks.
Hal yang perlu diperhatikan adalah:1. Tidak setiap matriks bujursangkar (jumlah baris dan kolom sama) mempunyai
invers. Bila A mempunyai invers, maka A disebut non-singular. Bila A mempunyai invers, maka A disebut matriks singular.
2. A dan A-1 merupakan invers satu sama lain.3. Bila A adalah n × n, maka A-1 juga harus n × n; kalau tidak, masing-masing
dimensinya tidak sesuai sehingga tidak dapat saling dikalikan. Matriks identitas yang diperoleh dari hasil perkalian juga berdimensi n × n.
4. Bila suatu matriks mempunyai invers, maka untuk membuktikannya, anggap B merupakan invers dari A
AB=BA=ISekarang anggaplah bahwa terdapat matriks lain C sehingga AC=CA=I . Dengan mengalikan bagian AB=Idengan C maka
CAB=CI (¿C )Karena dari asumsi CA=I , maka persamaan semula dapat diperkecil menjadi
IB=C atau B=C

B dan C merupakan inverse matriks yang sama. Dengan alasan ini kita bisa menyatakan invers A.
5. Kedua bagian dari kondisi A A−1=I dan A−1 A=I sebenarnya secara tidak langsung menyatakan bahwa kedua hubungan inverse antara A dan A−1. Pembuktian
( BA ) A−1=IA−1
B ( AA−1 )=IA−1 [hukum asosiatif]
BI=IA−1 [AA−1= I dari asumsi]Maka, seperti yang disyaratkan
B=A−1
Menggunakan cara yang sama, dapat dibuktikan bahwa, bila AA−1=I, maka satu-satunya matriks C yang dapat menghasilkan CA−1=I adala hC=A .Contoh
A=[3 10 2]dan B=1
6 [2 −10 3 ], dan karena pengganda konstan (
16) dalam B dapat
dipindahkan ke belakang (hukum komutatif), maka kita dapat menulis
AB=[3 10 2] [2 −1
0 3 ] 16=[6 0
0 6] 16=[1 0
0 1]Ini membuktikan B sebagai inverse A, atau sebaliknya. Perkalian sebaliknya, juga menghasilkan matriks Identitas :
AB=16 [3 1
0 2] [2 −10 3 ]=1
6 [6 00 6 ]=[1 0
0 1]Ketiga sifat-sifat inverse matriks berikut ini menarik untuk diperhatikan. Bila A dan B merupakan matriks non-singular dengan dimensi n x n, maka :
( A¿¿−1)−1=A ¿( AB)−1=B−1 A−1
( A' )−1=(A ¿¿−1)' ¿Yang pertama menyatakan bahwa inverse dari suatu inverse matriks adalah matriks asalnya. Yang kedua, menyatakan bahwa inverse hasil perkalian suatu matriks adalah perkalian dari suatu inverse matriks dalam urutan yang terbalik (inverse order). Dan yang terakhir menyatakan bahwa inverse dari suatu transpose adalah transpose dari inverse matriks tersebut.
Matriks Invers dan Penyelesaian Sistem Persamaan LinearPenggunaan konsep matriks inverse dalam suatu penyelesaian suatu sistem persamaan linear adalah langsung dan cepat.
A x = dAkan menghasilkanA−1Ax = A−1dAtaux = A−1 d
A=[6 3 11 4 −24 −1 5 ] x=[x1
x2
x3]d=[22
1210]

Maka inverse matriks A adalah A−1= 152 [ 18 −16 −10
−13 26 13−17 18 21 ]
[ x1
x2
x3]= 1
52 [ 18 −16 −10−13 26 13−17 18 21 ][22
1210]=[231]
Kesimpulannya, salah satu cara untuk mencari penyelesaian sistem persamaan linear Ax = d, dimana koefisien matriks A non-singular, pertama-tama kita cari inverse A−1, kemudian kalikan A−1dengan vektor konstan d. Hasil perkalian A−1d akan memberikan nilai jawaban dari variabelnya.
4.7 RANTAI MARKOV TERBATASProses Markov digunakan untuk mengukur atau mengestimasi pergerakan yang
terjadi setiap saat. Proses ini melibatkan penggunaan matriks transisi Markov, setiap nilai dalam matriks transisi adalah probabilitas pergerakan dari suatu keadaan ke keadaan lainnya.Selain itu, juga ada vektor yang memuat distribusi awal diantara berbagai keadaan itu. Dengan mengulang perkalian vektor seperti itu dengan matriks transisi, dapat mengestimasi perubahan-perubahan keadaan setiap saat.
Masalah pergerakan karyawan internal suatu perusahaan yang memiliki banyak cabang atau outlet. Definisikan probabilitas/kemungkinan transisional sebagai berikut:
PAA ≡ probabilitas bahwa yang sekarang ada di A nantinya tetap di APAB ≡ probabilitas bahwa yang sekarang ada di A nantinya pindah ke BPBB ≡ probabilitas bahwa yang sekarang ada di B nantinya tetap di BPBA ≡ probabilitas bahwa yang sekarang ada di B nantinya pindah ke A
Distribusi karyawan di beberapa lokasi pada waktu t sebagai vektor dapat ditulisx '
1=[ A t B t ]Dan probabilitas transisionalnya dalam bentuk matriks adalah
M=[P AA PAB
PBA PBB]
Maka distribusi karyawan di beberapa lokasi pada periode berikutnya (t + 1) adalahx '
1 M = x 't+1
[ At Bt ] [PAA PAB
PBA PBB]= [ ( A t PAA+Bt PBA ) ( A t PAB+Bt PBB ) ]=[ A t+1 B t+1 ]
Umumnya untuk n periode
[ At Bt ] [PAA PAB
PBA PBB]n
= [ A t+n Bt+n ]
Matriks probabilitas M 2 ×2 disebut sebagai matriks transisi Markov. Untuk kasus dimana n eksogen, prosesnya disebut sebagai ranati Markov tak terbatas.
Rantai Markov Penyerap

Karyawan dapat keluar dari perusahaan dengan
PAE ≡ probabilitas bahwa A sekarang memilih keluar (E)PBE ≡ probabilitas bahwa B sekarang memilih keluar (E)
Asumsinya PAE =0 PBE = 0 PEE =1 Dengan memulai pada waktu t = 0, rantai Markov sekarang menjadi:
[ A0 B0 E0 ] [PAA PAB PAE
PBA PBB PBE
PEA PEB PEE]
n
=[ An Bn En ]
[ Ao B0 E0 ] [PAA PAB PAE
PBA PBB PBE
0 0 1 ]n
=[ An Bn En ]
(Asumsikan E0 = 0)Nilai probabilitas transisi ditemukan pada baris ketiga, bahwa setelah seorang karyawan keluarmenjadi E dalam satu keadaan (periode waktu), karyawan itu akan tetap demikian utnuk semua keadaan (periode waktu) di masa depan. Karena n tidak terbatas, maka An dan Bn akan mendekati nol dan En akan mendekati nilai jumlah total pekerja pada waktu nol (misalnya A0+B0+E0).
TUGAS MATEMATIKA
“RANGKUMAN BAB 4 : MODEL LINEAR DAN ALJABAR MATRIKS”

OLEH
LU’LUIL BAHIROH 115020300111041
JURUSAN AKUNTANSI
FAKULTAS EKONOMI DAN BISNIS
UNIVERSITAS BRAWIJAYA