hendra gunawan, ph.d. - personal.fmipa.itb.ac.id · mengapa perlu rumus sudut antara dua subruang...
TRANSCRIPT
HENDRA GUNAWAN, Ph.D.
PIDATO ILMIAH
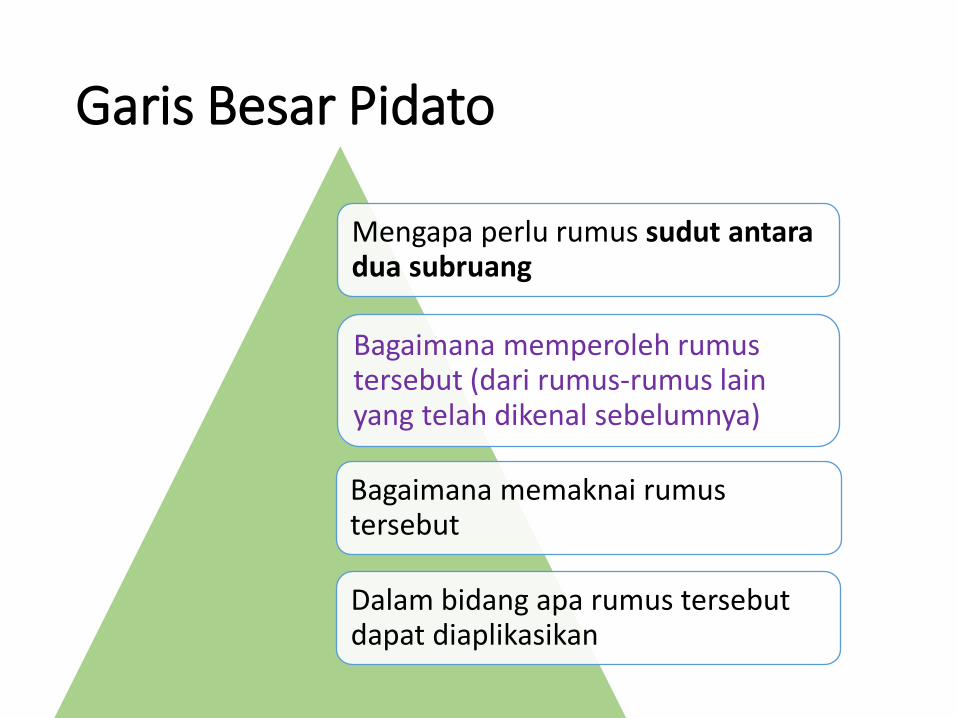
Garis Besar Pidato
Mengapa perlu rumus sudut antaradua subruang
Bagaimana memperoleh rumustersebut (dari rumus-rumus lain yang telah dikenal sebelumnya)
Bagaimana memaknai rumustersebut
Dalam bidang apa rumus tersebutdapat diaplikasikan
Regresi Linear & Sudut Antara Garis dan Bidang• Regresi linear: Diberikan 𝑛 titik data,
(𝑥1, 𝑦1), (𝑥2, 𝑦2), … , (𝑥𝑛, 𝑦𝑛),
ingin dicari suatu persamaan 𝑦 = 𝑎𝑥 + 𝑏yang menghampiri data tersebut, dengan galat (error) sekecil-kecilnya.
• Persoalan ini lazim diselesaikan dengan Metode Kuadrat Terkecil, yang dipopulerkan oleh Carl-Friedrich Gauss(1777-1855).
•Metode Kuadrat Terkecil dicetuskanpertama kali oleh Adrien-Marie Legendre(1752-1833).
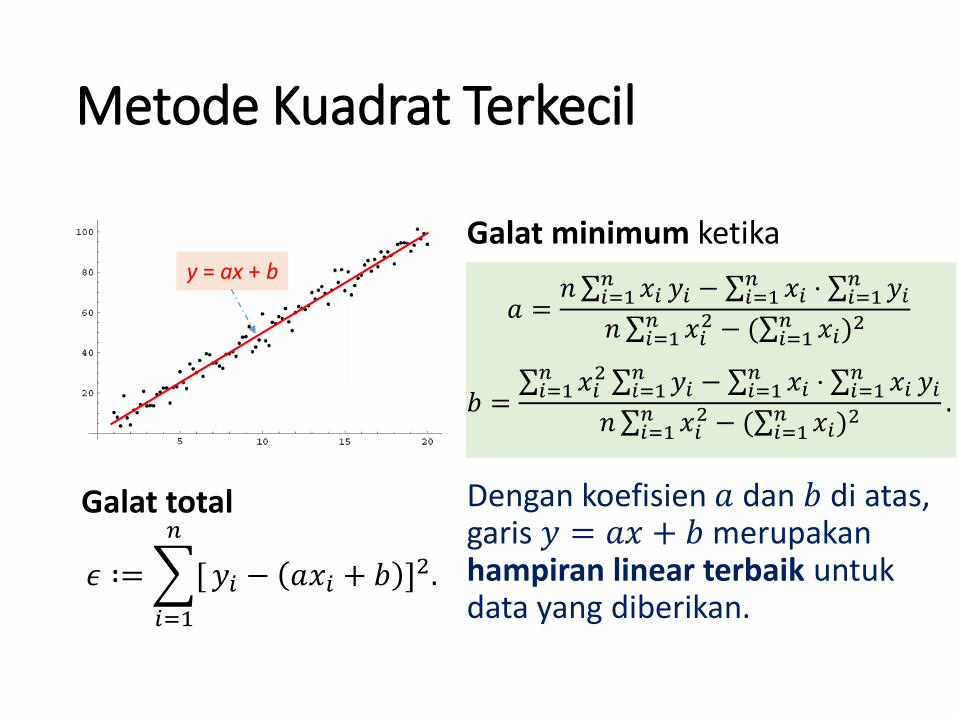
Metode Kuadrat Terkecil
Galat minimum ketika
𝑎 =𝑛 𝑖=1
𝑛 𝑥𝑖 𝑦𝑖 − 𝑖=1𝑛 𝑥𝑖 ⋅ 𝑖=1
𝑛 𝑦𝑖
𝑛 𝑖=1𝑛 𝑥𝑖
2 − ( 𝑖=1𝑛 𝑥𝑖)
2
𝑏 = 𝑖=1𝑛 𝑥𝑖
2 𝑖=1𝑛 𝑦𝑖 − 𝑖=1
𝑛 𝑥𝑖 ⋅ 𝑖=1𝑛 𝑥𝑖 𝑦𝑖
𝑛 𝑖=1𝑛 𝑥𝑖
2 − ( 𝑖=1𝑛 𝑥𝑖)
2.
Dengan koefisien 𝑎 dan 𝑏 di atas, garis 𝑦 = 𝑎𝑥 + 𝑏 merupakan hampiran linear terbaik untuk data yang diberikan.
y = ax + b
Galat total
𝜖 ∶=
𝑖=1
𝑛
[ 𝑦𝑖 − 𝑎𝑥𝑖 + 𝑏 ]2.
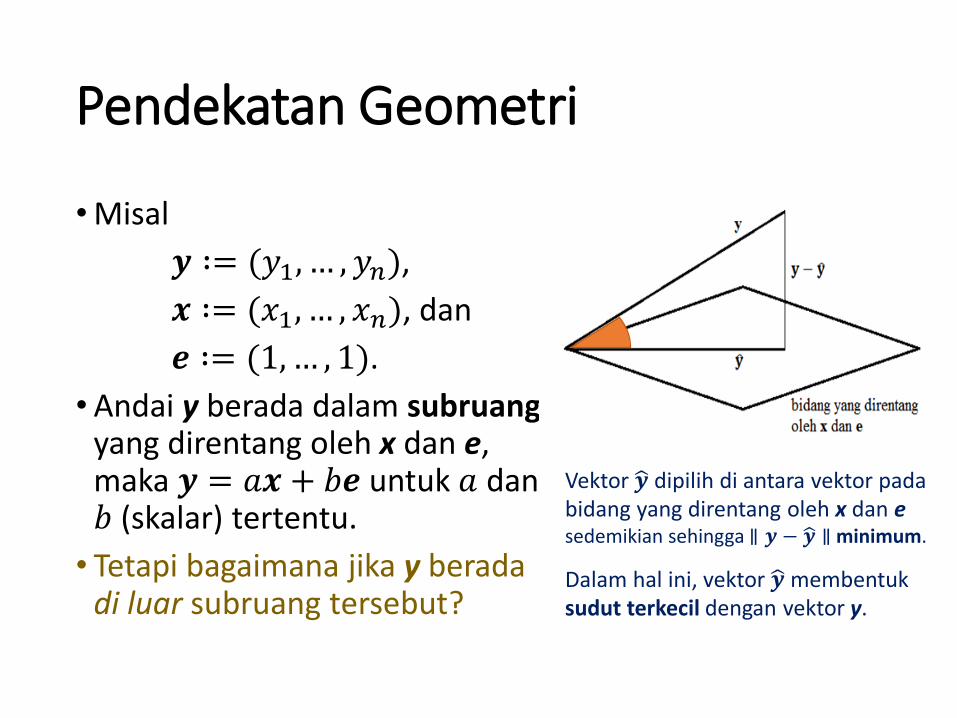
Pendekatan Geometri
•Misal
𝒚 ∶= (𝑦1, … , 𝑦𝑛),
𝒙 ∶= (𝑥1, … , 𝑥𝑛), dan
𝒆 ∶= (1,… , 1).
•Andai y berada dalam subruangyang direntang oleh x dan e, maka 𝒚 = 𝑎𝒙 + 𝑏𝒆 untuk 𝑎 dan 𝑏 (skalar) tertentu.
• Tetapi bagaimana jika y beradadi luar subruang tersebut?
Vektor 𝒚 dipilih di antara vektor padabidang yang direntang oleh x dan esedemikian sehingga ∥ 𝒚 − 𝒚 ∥ minimum.
Dalam hal ini, vektor 𝒚 membentuk sudut terkecil dengan vektor y.
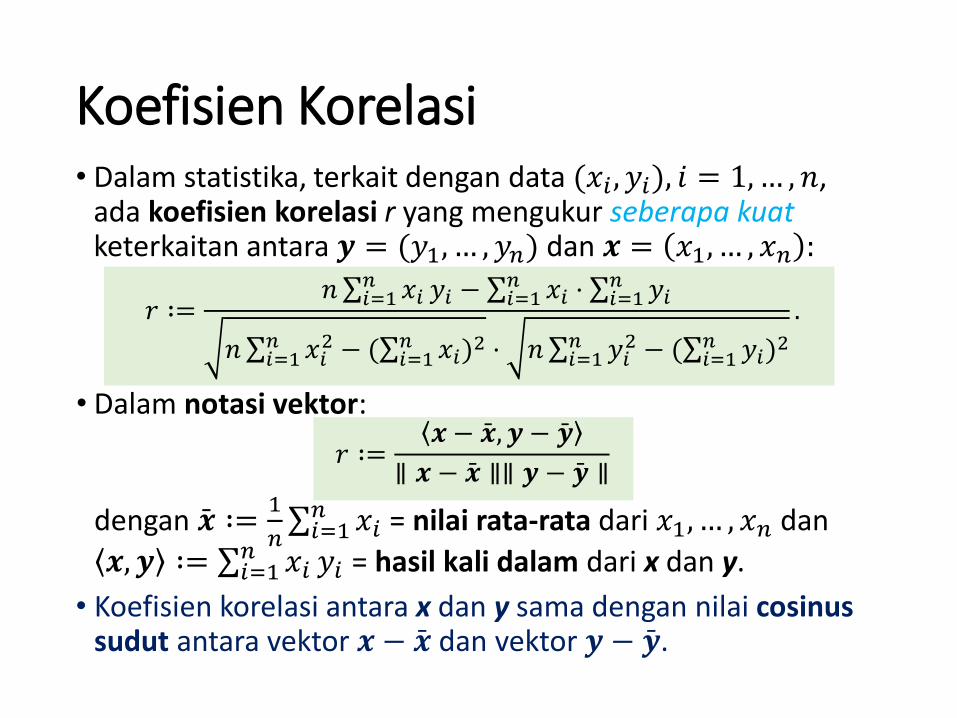
Koefisien Korelasi• Dalam statistika, terkait dengan data (𝑥𝑖 , 𝑦𝑖), 𝑖 = 1,… , 𝑛,
ada koefisien korelasi r yang mengukur seberapa kuatketerkaitan antara 𝒚 = (𝑦1, … , 𝑦𝑛) dan 𝒙 = 𝑥1, … , 𝑥𝑛 :
𝑟 ∶=𝑛 𝑖=1
𝑛 𝑥𝑖 𝑦𝑖 − 𝑖=1𝑛 𝑥𝑖 ⋅ 𝑖=1
𝑛 𝑦𝑖
𝑛 𝑖=1𝑛 𝑥𝑖
2 − ( 𝑖=1𝑛 𝑥𝑖)
2 ⋅ 𝑛 𝑖=1𝑛 𝑦𝑖
2 − ( 𝑖=1𝑛 𝑦𝑖)
2
.
• Dalam notasi vektor:
𝑟 ∶=𝒙 − 𝒙, 𝒚 − 𝒚
∥ 𝒙 − 𝒙 ∥∥ 𝒚 − 𝒚 ∥
dengan 𝒙 ∶=1
𝑛 𝑖=1𝑛 𝑥𝑖 = nilai rata-rata dari 𝑥1, … , 𝑥𝑛 dan
𝒙, 𝒚 ∶= 𝑖=1𝑛 𝑥𝑖 𝑦𝑖 = hasil kali dalam dari x dan y.
• Koefisien korelasi antara x dan y sama dengan nilai cosinus sudut antara vektor 𝒙 − 𝒙 dan vektor 𝒚 − 𝒚.
Sudut antara Dua Subruang
Misalkan kita mempunyai dua himpunan vektor, yaitu{𝑢1, … , 𝑢𝑝} dan {𝑣1, … , 𝑣𝑞}, di suatu ruang hasil kali dalam 𝑋 berdimensi 𝑛, dengan 1 ≤ 𝑝 ≤ 𝑞 ≤ 𝑛.
(Mulai sekarang, vektor tidak lagi dituliskan dengan huruf tebal; sebagai contoh 𝑢1 = 𝑢11, … , 𝑢1𝑛 adalah vektor di ruang berdimensi 𝑛.)
Bagaimana caranya menghitung besar sudut antara subruang 𝑈 yang direntang oleh {𝑢1, … , 𝑢𝑝} dan subruang 𝑉 yang direntang oleh {𝑣1, … , 𝑣𝑞}?
Sudut antara Dua Subruang
Besar sudut tersebut merupakan ukuranseberapa mirip himpunan ‘data’ {𝑢1, … , 𝑢𝑝}dan himpunan data {𝑣1, … , 𝑣𝑞} (bila 𝑝 = 𝑞),atau …
seberapa baik kita dapat menghampiri himpunan data {𝑢1, … , 𝑢𝑝} dengan suatu himpunan 𝑝 buah anggota subruang yang direntang oleh {𝑣1, … , 𝑣𝑞} (bila 𝑝 ≤ 𝑞).
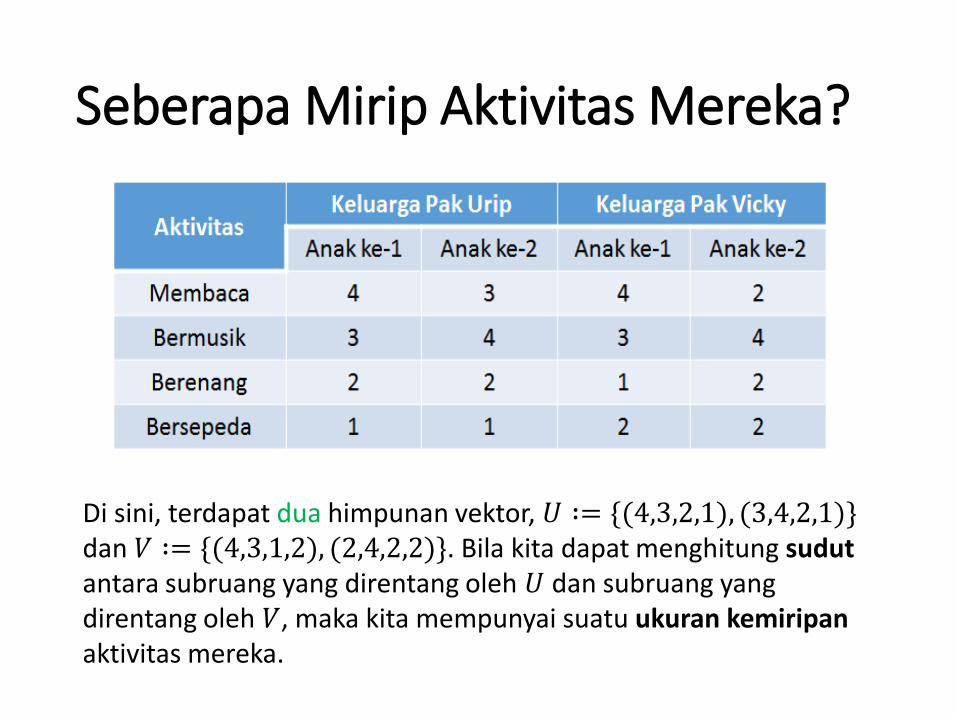
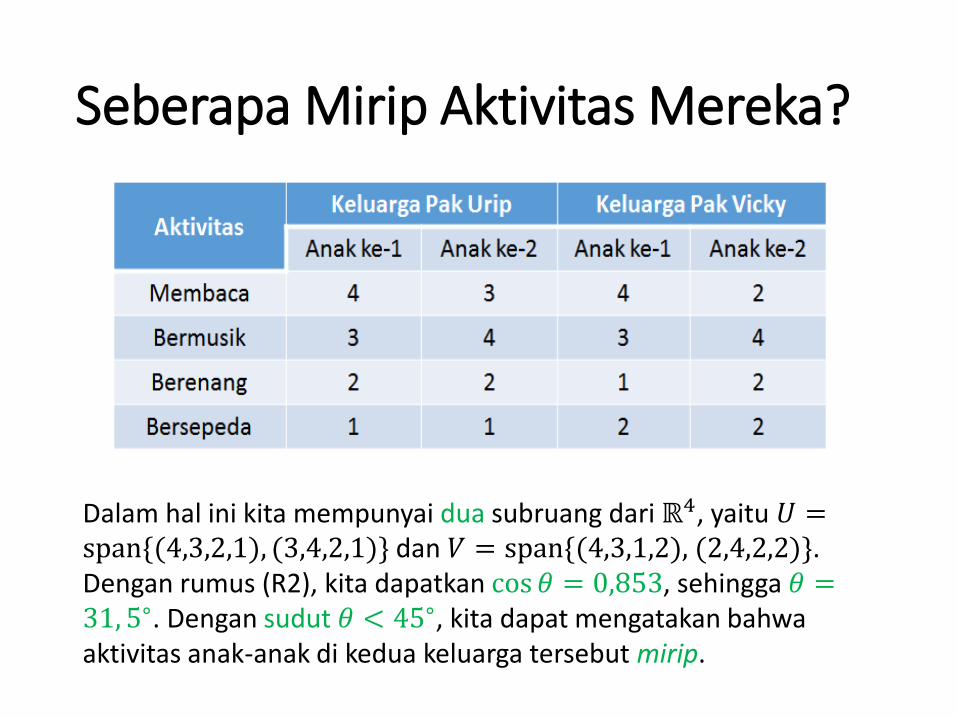
Seberapa Mirip Aktivitas Mereka?
Di sini, terdapat dua himpunan vektor, 𝑈 ∶= {(4,3,2,1), (3,4,2,1)}dan 𝑉 ∶= {(4,3,1,2), (2,4,2,2)}. Bila kita dapat menghitung sudutantara subruang yang direntang oleh 𝑈 dan subruang yang direntang oleh 𝑉, maka kita mempunyai suatu ukuran kemiripanaktivitas mereka.
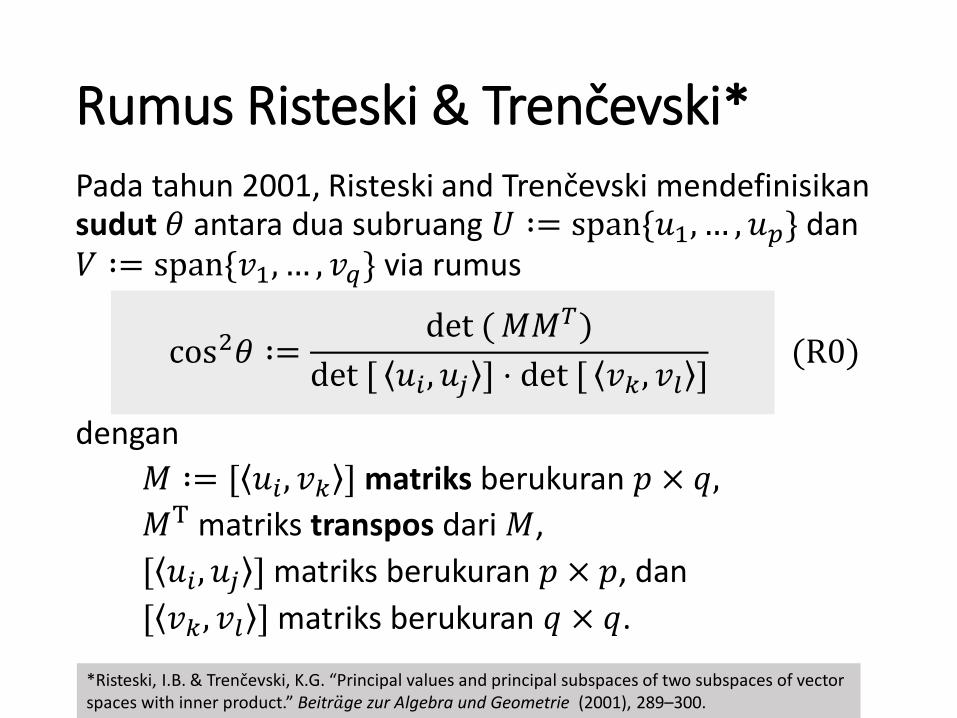
Rumus Risteski & Trenčevski*Pada tahun 2001, Risteski and Trenčevski mendefinisikan sudut 𝜃 antara dua subruang 𝑈 ∶= span{𝑢1, … , 𝑢𝑝} dan 𝑉 ∶= span{𝑣1, … , 𝑣𝑞} via rumus
cos2𝜃 ∶=det (𝑀𝑀𝑇)
det [ 𝑢𝑖, 𝑢𝑗 ] ⋅ det [ 𝑣𝑘, 𝑣𝑙 ](R0)
dengan
𝑀 ∶= [ 𝑢𝑖, 𝑣𝑘 ] matriks berukuran 𝑝 × 𝑞,
𝑀T matriks transpos dari 𝑀,
[ 𝑢𝑖, 𝑢𝑗 ] matriks berukuran 𝑝 × 𝑝, dan
[ 𝑣𝑘, 𝑣𝑙 ] matriks berukuran 𝑞 × 𝑞.
*Risteski, I.B. & Trenčevski, K.G. “Principal values and principal subspaces of two subspaces of vector spaces with inner product.” Beitr 𝑎ge zur Algebra und Geometrie (2001), 289–300.
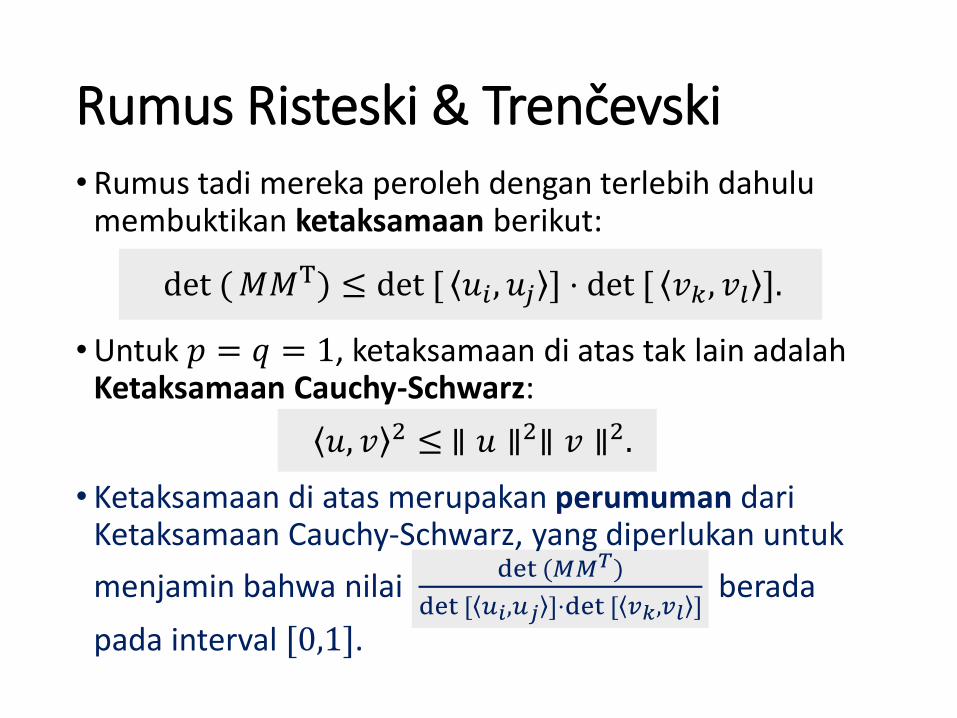
Rumus Risteski & Trenčevski• Rumus tadi mereka peroleh dengan terlebih dahulu
membuktikan ketaksamaan berikut:
det (𝑀𝑀T) ≤ det [ 𝑢𝑖, 𝑢𝑗 ] ⋅ det [ 𝑣𝑘, 𝑣𝑙 ].
•Untuk 𝑝 = 𝑞 = 1, ketaksamaan di atas tak lain adalah Ketaksamaan Cauchy-Schwarz:
𝑢, 𝑣 2 ≤ ∥ 𝑢 ∥2∥ 𝑣 ∥2.
• Ketaksamaan di atas merupakan perumuman dari Ketaksamaan Cauchy-Schwarz, yang diperlukan untuk
menjamin bahwa nilaidet (𝑀𝑀𝑇)
det [ 𝑢𝑖,𝑢𝑗 ]⋅det [ 𝑣𝑘,𝑣𝑙 ]berada
pada interval [0,1].
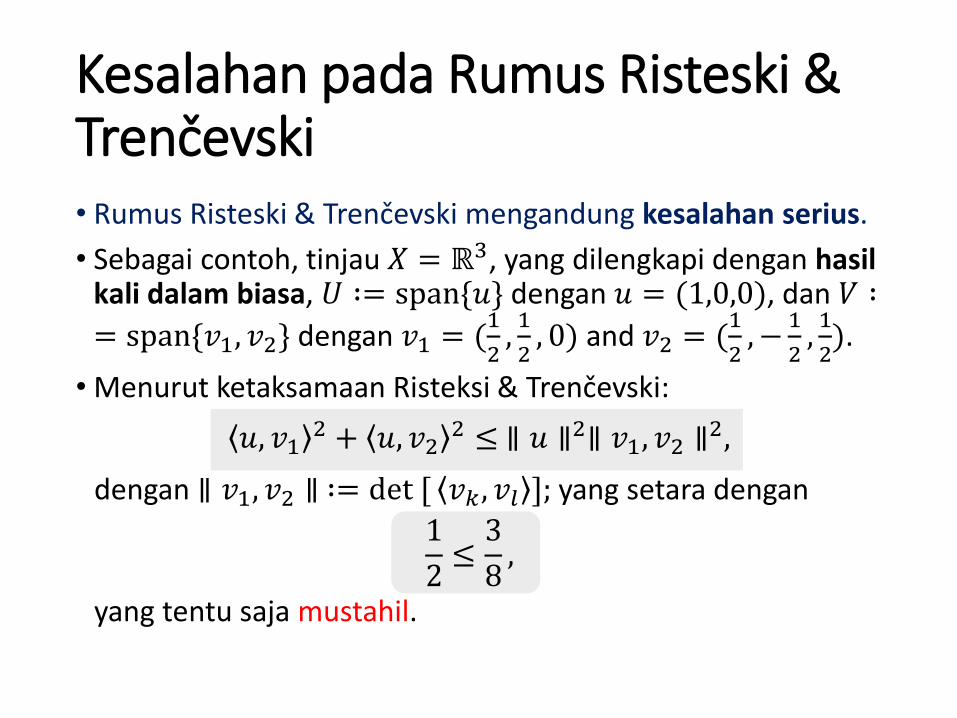
Kesalahan pada Rumus Risteski &Trenčevski• Rumus Risteski & Trenčevski mengandung kesalahan serius.
• Sebagai contoh, tinjau 𝑋 = ℝ3, yang dilengkapi dengan hasil kali dalam biasa, 𝑈 ∶= span{𝑢} dengan 𝑢 = (1,0,0), dan 𝑉 ∶
= span{𝑣1, 𝑣2} dengan 𝑣1 = (1
2,1
2, 0) and 𝑣2 = (
1
2, −
1
2,1
2).
• Menurut ketaksamaan Risteksi & Trenčevski:
𝑢, 𝑣12 + 𝑢, 𝑣2
2 ≤ ∥ 𝑢 ∥2∥ 𝑣1, 𝑣2 ∥2,
dengan ∥ 𝑣1, 𝑣2 ∥ ∶= det [ 𝑣𝑘 , 𝑣𝑙 ]; yang setara dengan
1
2≤3
8,
yang tentu saja mustahil.
Bagaimana Memperbaikinya
•Misalkan 𝑋 adalah ruang vektor yang dilengkapi dengan hasil kali dalam ∙ , ∙ .
•Diberikan dua subruang dari 𝑋, sebutlah 𝑈 dan 𝑉, dengan dimensi 𝑝 dan 𝑞, 1 ≤ 𝑝 ≤ 𝑞 ≤ dim 𝑋 , kitaingin merumuskan sudut antara 𝑈 dan 𝑉.
• Sebelum itu, kita tinjau terlebih dahulu dua kasus khusus, yaitu
(a) dim(𝑈) = 1, dim(𝑉) = 𝑞 sembarang;
(b) dim(𝑈) = dim(𝑉) = 𝑝 ≥ 2, dim(𝑈 ∩ 𝑉) = 𝑝 − 1.
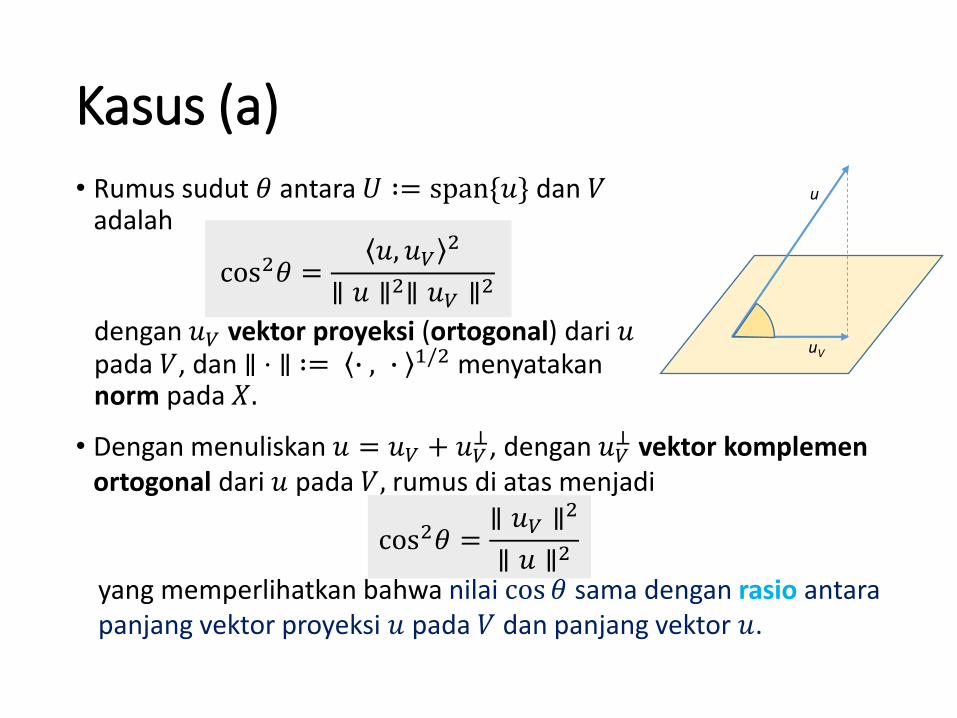
Kasus (a)
• Rumus sudut 𝜃 antara 𝑈 ∶= span{𝑢} dan 𝑉adalah
cos2𝜃 =𝑢, 𝑢𝑉
2
∥ 𝑢 ∥2∥ 𝑢𝑉 ∥2
dengan 𝑢𝑉 vektor proyeksi (ortogonal) dari 𝑢pada 𝑉, dan ∥ ⋅ ∥ ∶= ∙ , ∙ 1/2 menyatakan norm pada 𝑋.
u
uV
θ
• Dengan menuliskan 𝑢 = 𝑢𝑉 + 𝑢𝑉⊥, dengan 𝑢𝑉
⊥ vektor komplemen ortogonal dari 𝑢 pada 𝑉, rumus di atas menjadi
cos2𝜃 =∥ 𝑢𝑉 ∥2
∥ 𝑢 ∥2
yang memperlihatkan bahwa nilai cos 𝜃 sama dengan rasio antara panjang vektor proyeksi 𝑢 pada 𝑉 dan panjang vektor 𝑢.
Kasus (b)• Misalkan
𝑈 ∶= span 𝑢,𝑤2, … , 𝑤𝑝 ,
𝑉 ∶= span{𝑣,𝑤2, … , 𝑤𝑝}, dan
𝑊 ∶= 𝑈 ∩ 𝑉 = span{𝑤2, … , 𝑤𝑝}, dengan 𝑝 ≥ 2.
• Menggunakan sifat determinan, dapat diperiksa bahwa nilai cos 𝜃 sama dengan rasio antara volume paralelpipedium (berdimensi 𝑝) yang direntang oleh vektor-vektor proyeksi 𝑢,𝑤2, … , 𝑤𝑝 pada 𝑉 dan volume
paralelpipedium yang direntang oleh vektor-vektor 𝑢,𝑤2, … , 𝑤𝑝.
Rumus sudut 𝜃 antara 𝑈 dan 𝑉 adalah
cos2𝜃 =𝑢𝑊⊥ , 𝑣𝑊
⊥ 2
∥ 𝑢𝑊⊥ ∥2∥ 𝑣𝑊
⊥ ∥2
dengan 𝑢𝑊⊥ dan 𝑣𝑊
⊥ vektor komplemen ortogonal dari 𝑢 dan 𝑣 pada 𝑊.
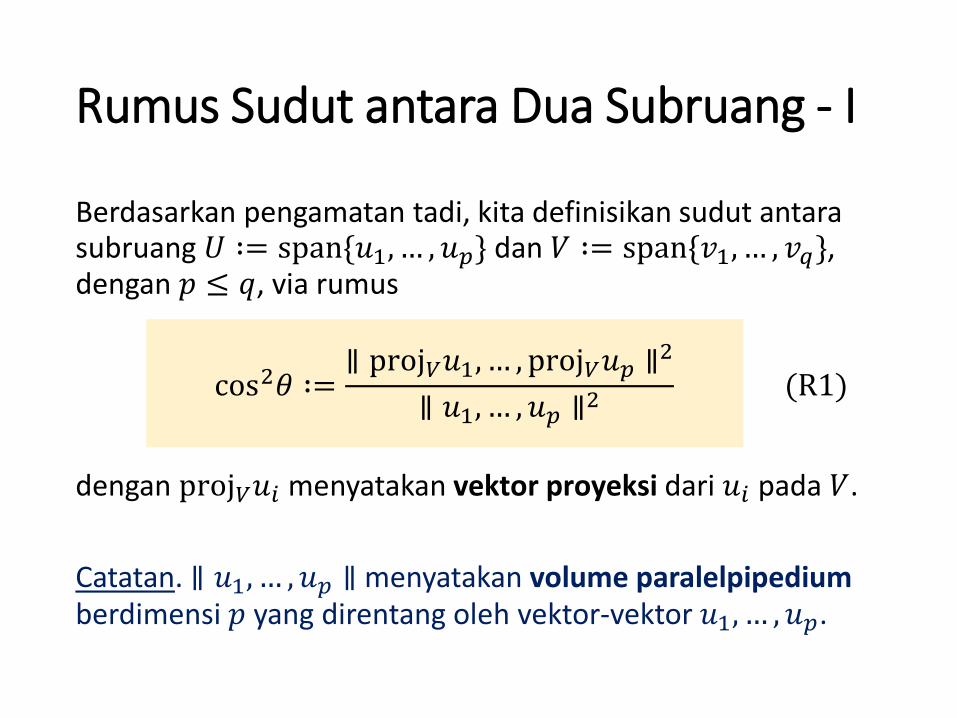
Rumus Sudut antara Dua Subruang - I
Berdasarkan pengamatan tadi, kita definisikan sudut antara subruang 𝑈 ∶= span{𝑢1, … , 𝑢𝑝} dan 𝑉 ∶= span{𝑣1, … , 𝑣𝑞}, dengan 𝑝 ≤ 𝑞, via rumus
cos2𝜃 ∶=∥ proj𝑉𝑢1, … , proj𝑉𝑢𝑝 ∥
2
∥ 𝑢1, … , 𝑢𝑝 ∥2(R1)
dengan proj𝑉𝑢𝑖 menyatakan vektor proyeksi dari 𝑢𝑖 pada 𝑉.
Catatan. ∥ 𝑢1, … , 𝑢𝑝 ∥ menyatakan volume paralelpipedium berdimensi 𝑝 yang direntang oleh vektor-vektor 𝑢1, … , 𝑢𝑝.
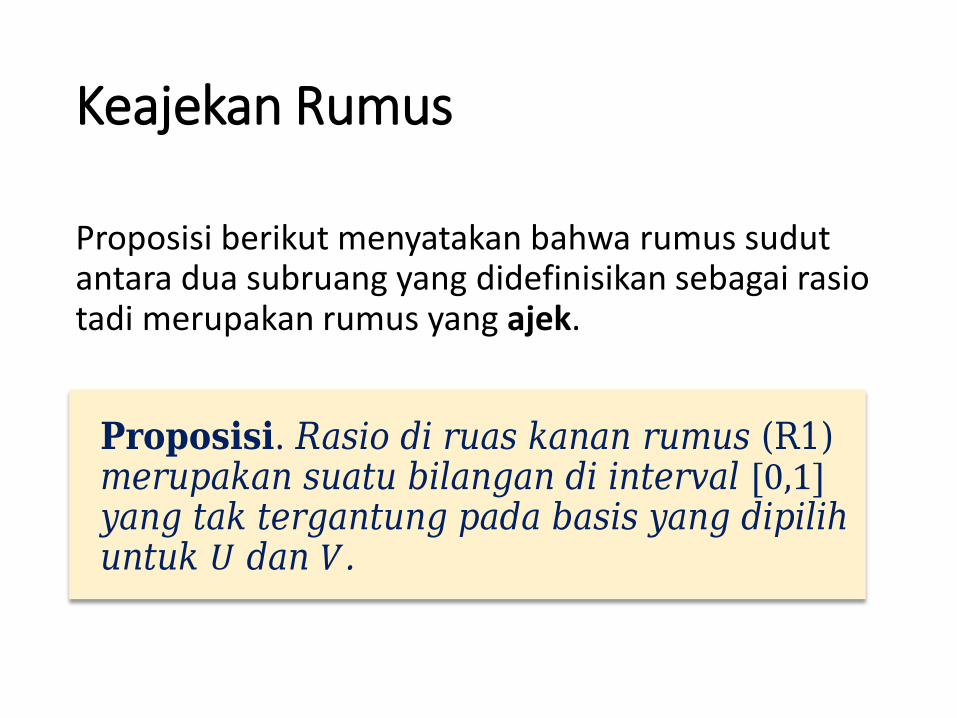
Keajekan Rumus
Proposisi berikut menyatakan bahwa rumus sudutantara dua subruang yang didefinisikan sebagai rasiotadi merupakan rumus yang ajek.
Proposisi. Rasio di ruas kanan rumus (R1)merupakan suatu bilangan di interval [0,1]yang tak tergantung pada basis yang dipilihuntuk 𝑈 dan 𝑉.
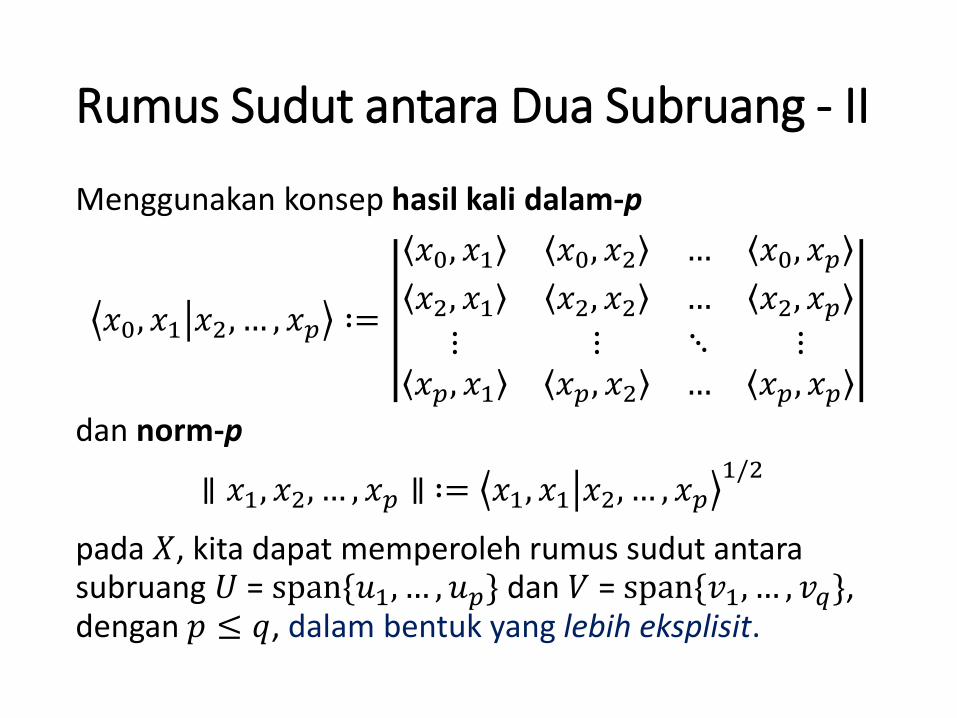
Rumus Sudut antara Dua Subruang - II
Menggunakan konsep hasil kali dalam-p
𝑥0, 𝑥1 𝑥2, … , 𝑥𝑝 ∶=
𝑥0, 𝑥1 𝑥0, 𝑥2 … 𝑥0, 𝑥𝑝𝑥2, 𝑥1 𝑥2, 𝑥2 … 𝑥2, 𝑥𝑝⋮ ⋮ ⋱ ⋮
𝑥𝑝, 𝑥1 𝑥𝑝, 𝑥2 … 𝑥𝑝, 𝑥𝑝dan norm-p
∥ 𝑥1, 𝑥2, … , 𝑥𝑝 ∥ ∶= 𝑥1, 𝑥1 𝑥2, … , 𝑥𝑝1/2
pada 𝑋, kita dapat memperoleh rumus sudut antara subruang 𝑈 = span{𝑢1, … , 𝑢𝑝} dan 𝑉 = span{𝑣1, … , 𝑣𝑞}, dengan 𝑝 ≤ 𝑞, dalam bentuk yang lebih eksplisit.
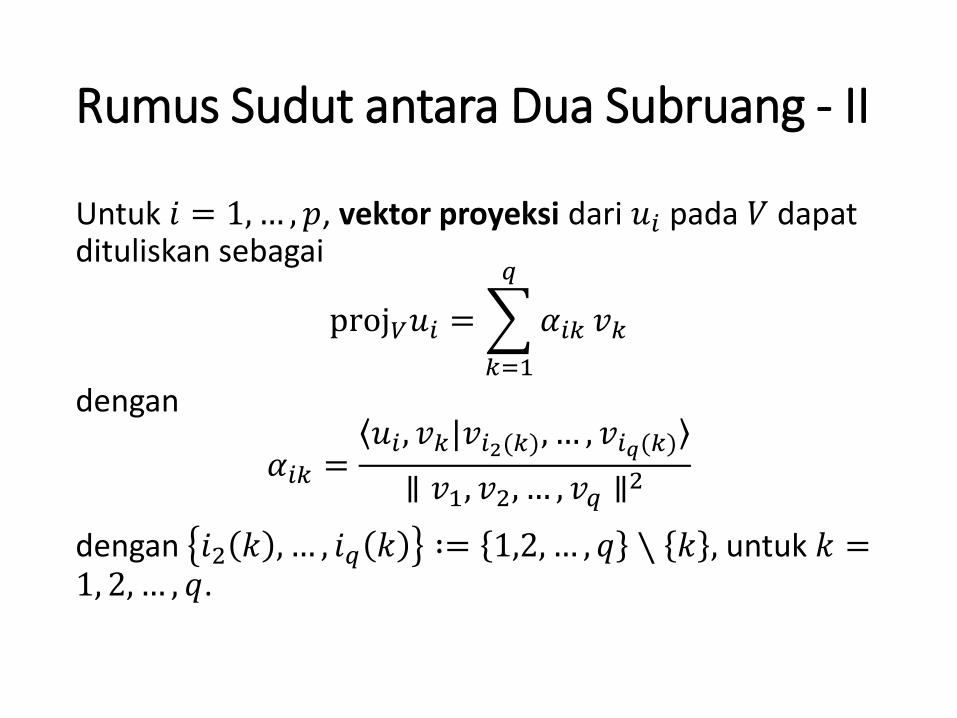
Rumus Sudut antara Dua Subruang - II
Untuk 𝑖 = 1, … , 𝑝, vektor proyeksi dari 𝑢𝑖 pada 𝑉 dapat dituliskan sebagai
proj𝑉𝑢𝑖 =
𝑘=1
𝑞
𝛼𝑖𝑘 𝑣𝑘
dengan
𝛼𝑖𝑘 =𝑢𝑖, 𝑣𝑘|𝑣𝑖2(𝑘), … , 𝑣𝑖𝑞(𝑘)
∥ 𝑣1, 𝑣2, … , 𝑣𝑞 ∥2
dengan 𝑖2 𝑘 , … , 𝑖𝑞 𝑘 ∶= 1,2, … , 𝑞 ∖ 𝑘 , untuk 𝑘 =1, 2, … , 𝑞.
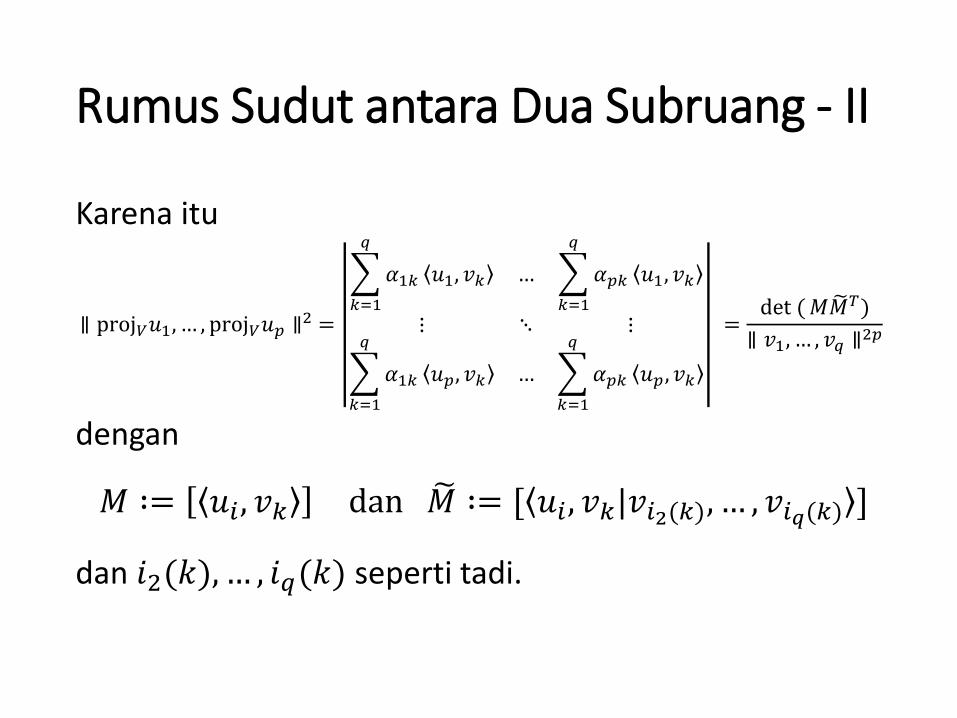
Rumus Sudut antara Dua Subruang - II
Karena itu
∥ proj𝑉𝑢1, … , proj𝑉𝑢𝑝 ∥2 =
𝑘=1
𝑞
𝛼1𝑘 𝑢1, 𝑣𝑘 …
𝑘=1
𝑞
𝛼𝑝𝑘 𝑢1, 𝑣𝑘
⋮ ⋱ ⋮
𝑘=1
𝑞
𝛼1𝑘 𝑢𝑝, 𝑣𝑘 …
𝑘=1
𝑞
𝛼𝑝𝑘 𝑢𝑝, 𝑣𝑘
=det (𝑀 𝑀𝑇)
∥ 𝑣1, … , 𝑣𝑞 ∥2𝑝
dengan
𝑀 ∶= 𝑢𝑖, 𝑣𝑘 dan 𝑀 ∶= [ 𝑢𝑖, 𝑣𝑘|𝑣𝑖2(𝑘), … , 𝑣𝑖𝑞(𝑘) ]
dan 𝑖2(𝑘), … , 𝑖𝑞(𝑘) seperti tadi.
Rumus Sudut antara Dua Subruang - II
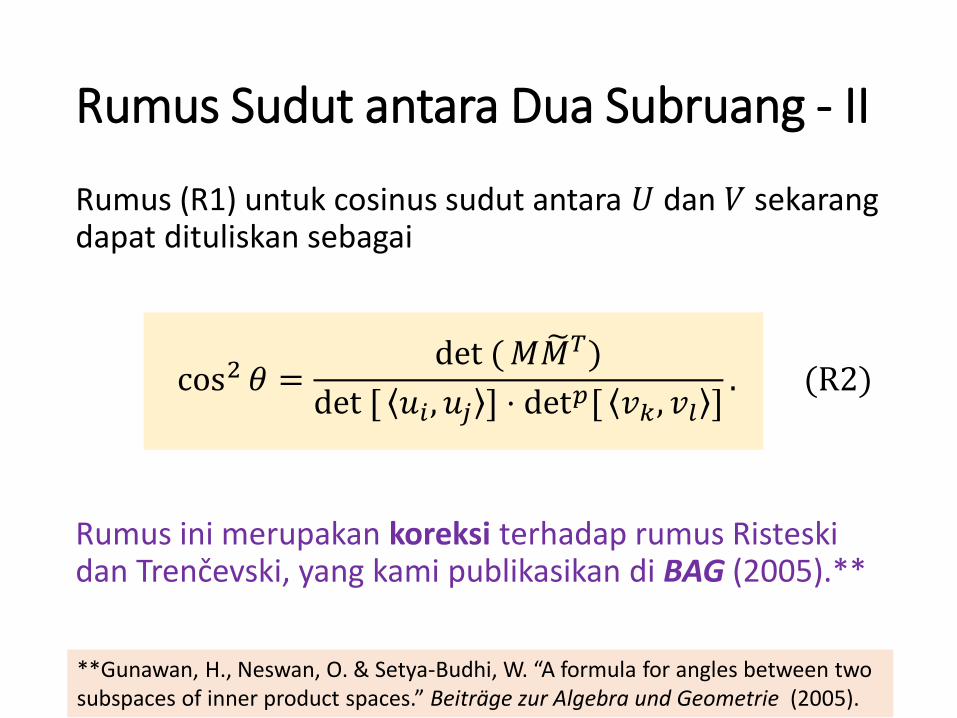
Rumus (R1) untuk cosinus sudut antara 𝑈 dan 𝑉 sekarang dapat dituliskan sebagai
cos2 𝜃 =det (𝑀 𝑀𝑇)
det [ 𝑢𝑖, 𝑢𝑗 ] ⋅ det𝑝[ 𝑣𝑘, 𝑣𝑙 ]
. (R2)
Rumus ini merupakan koreksi terhadap rumus Risteski dan Trenčevski, yang kami publikasikan di BAG (2005).**
**Gunawan, H., Neswan, O. & Setya-Budhi, W. “A formula for angles between two subspaces of inner product spaces.” Beiträge zur Algebra und Geometrie (2005).
Rumus Sudut antara Dua Subruang - II
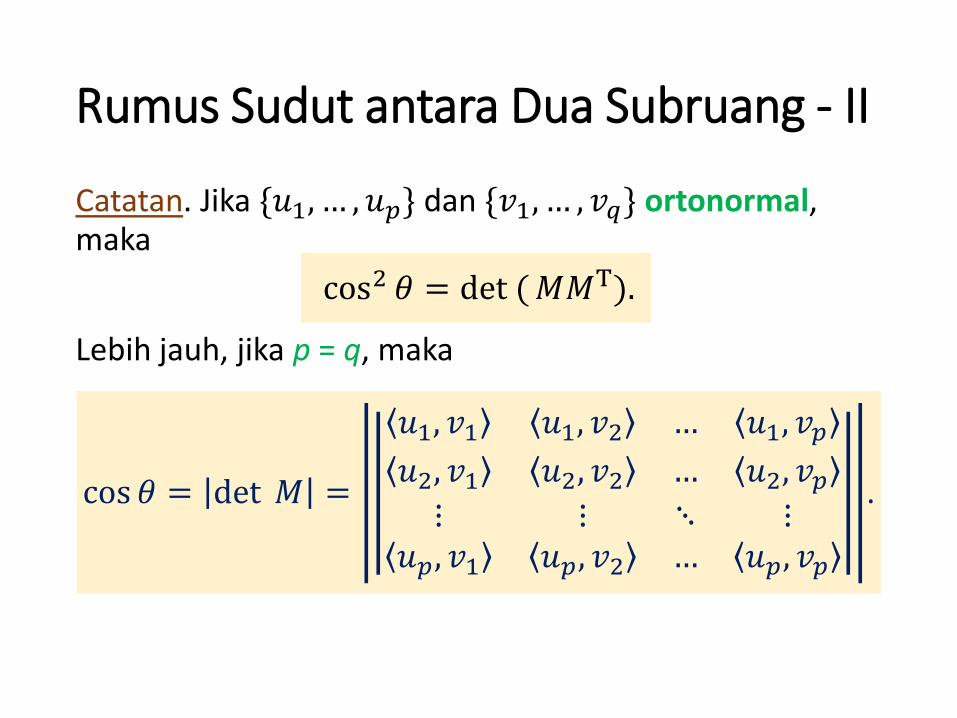
Catatan. Jika {𝑢1, … , 𝑢𝑝} dan {𝑣1, … , 𝑣𝑞} ortonormal,maka
cos2 𝜃 = det (𝑀𝑀T).
Lebih jauh, jika p = q, maka
cos 𝜃 = det 𝑀 =
𝑢1, 𝑣1 𝑢1, 𝑣2 … 𝑢1, 𝑣𝑝𝑢2, 𝑣1 𝑢2, 𝑣2 … 𝑢2, 𝑣𝑝⋮ ⋮ ⋱ ⋮
𝑢𝑝, 𝑣1 𝑢𝑝, 𝑣2 … 𝑢𝑝, 𝑣𝑝
.
Seberapa Mirip Aktivitas Mereka?
Dalam hal ini kita mempunyai dua subruang dari ℝ4, yaitu 𝑈 =span{(4,3,2,1), (3,4,2,1)} dan 𝑉 = span{(4,3,1,2), (2,4,2,2)}. Dengan rumus (R2), kita dapatkan cos 𝜃 = 0,853, sehingga 𝜃 =31, 5∘. Dengan sudut 𝜃 < 45∘, kita dapat mengatakan bahwa aktivitas anak-anak di kedua keluarga tersebut mirip.
Seberapa Mirip Aktivitas Mereka?
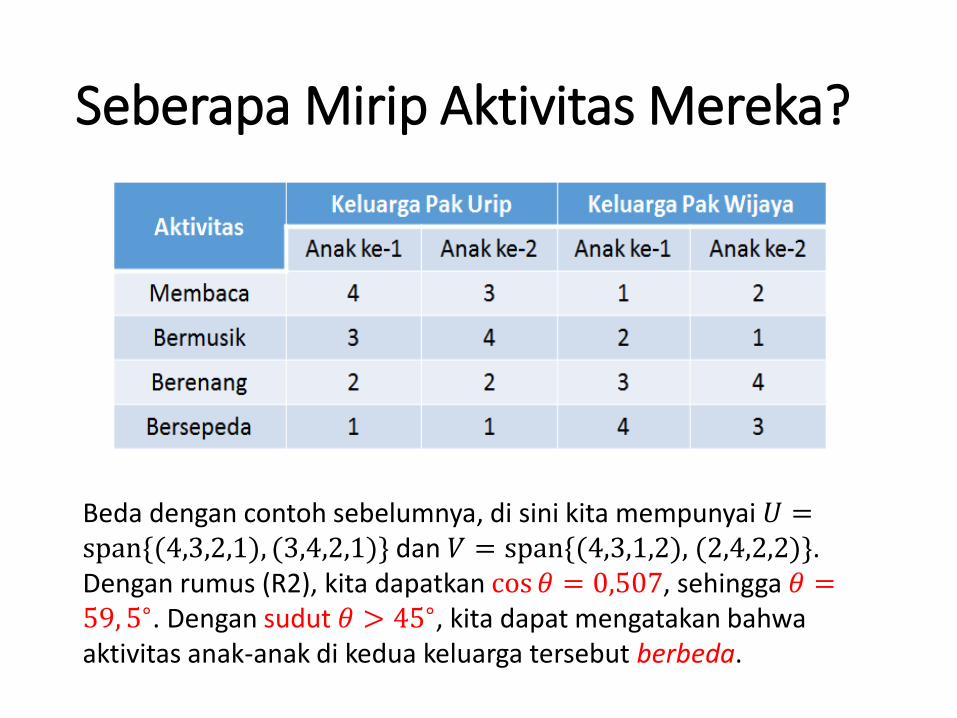
Beda dengan contoh sebelumnya, di sini kita mempunyai 𝑈 =span{(4,3,2,1), (3,4,2,1)} dan 𝑉 = span{(4,3,1,2), (2,4,2,2)}. Dengan rumus (R2), kita dapatkan cos 𝜃 = 0,507, sehingga 𝜃 =59, 5∘. Dengan sudut 𝜃 > 45∘, kita dapat mengatakan bahwa aktivitas anak-anak di kedua keluarga tersebut berbeda.
Potensi Aplikasi dalam BidangBiokimia
• David, C.C. & Jacobs, D.J. “Characterizing protein motions from structure.” Journal of Molecular Graphics and Modelling (2011).
• David, C.C. & Jacobs, D.J. “Principal component analysis: A method for determining the essential dynamics of proteins.” Methods in Molecular Biology (2014).
Potensi Aplikasi dalam BidangFisika
• Bosetti, H., dkk. “Time-reversal symmetry and covariant Lyapunov vectors for simple particle models in and out of thermal equilibrium.” Physical Review E - Statistical, Nonlinear, and Soft Matter Physics (2010).
• Chella, F., dkk. “Calibration of a multichannel MEG system based on the Signal Space Separation method.” Physics in Medicine and Biology (2012).
Potensi Aplikasi dalam BidangGrafika Komputer• Cao, W.M., dkk. “Content-based image retrieval using high-
dimensional information geometry.” Science China Information Sciences (2014).
• Kaveh, A. Optimal Analysis of Structures by Concepts of Symmetry and Regularity. Springer-Verlag, Wien (2013).
• Kaveh, A. & Fazli, H. “Approximate eigensolution of locally modified regular structures using a substructuring technique.” Computers and Structures (2011).
• Liwicki, S., dkk. “Euler principal component analysis.” International Journal of Computer Vision (2013).
• Liwicki, S., dkk. “Online kernel slow feature analysis for temporal video segmentation and tracking.” IEEE Transactions on Image Processing (2015).
• Peikert, R. & Sadlo, F. “Height ridge computation and filtering for visualization.” IEEE Pacific Visualisation Symposium 2008, PacificVis -Proceedings (2008).
Potensi Aplikasi dalam BidangOptimisasi
• Haesen, S., dkk. “On the extrinsic principal directions of Riemannian submanifolds.” Note di Matematica (2009).
• Pustylnik, E., dkk. “Convergence of infinite products of nonexpansive operators in Hilbert space.” Journal of Nonlinear and Convex Analysis (2010).
Potensi Aplikasi dalam BidangVehicular Technology
• Nam, S., dkk. “A PF scheduling with low complexity for downlink multi-user MIMO systems.” IEEE Vehicular Technology Conference (2013).
• Nam, S., dkk. “A user selection algorithm using angle between subspaces for downlink MU-MIMO systems.” IEEE Transactions on Communications (2014).
• Yi, X. & Au, E.K.S. “User scheduling for heterogeneous multiuser MIMO systems: A subspace viewpoint.” IEEE Transactions on Vehicular Technology (2011).
Penutup
TERIMA KASIH..
http://www.homeschoolingresourcecenter.org/