rekayasa gempa
DESCRIPTION
analisa rekayasa gempaTRANSCRIPT
V - 1
BAB V
SISTEM DERAJAT KEBEBASAN TUNGGAL TAK TEREDAM
(UNDAMPED SINGLE DEGREE OF FREEDOM SYSTEM)
V.1. Umum
Dalam dinamika struktur, jumlah koordinat bebas (independent coordinates) diperlukan
untuk menetapkan susunan atau posisi sistem pada setiap saat, yang berhubungan
dengan jumlah derajat kebebasan (degree of fredom). Pada umunya, struktur
berkesinambungan (continuous structure) mempunyai jumlah derajat kebebasan
(number of degree of fredom) tak berhingga. Namun dengan proses idealisasi atau
seleksi, sebuah model matematis yang tepat dapat merduksijumlah derajat kebebasan
menjadi suatu jumlah diskrit dan untuk beberapa keadaan dapat menjadi berderajat
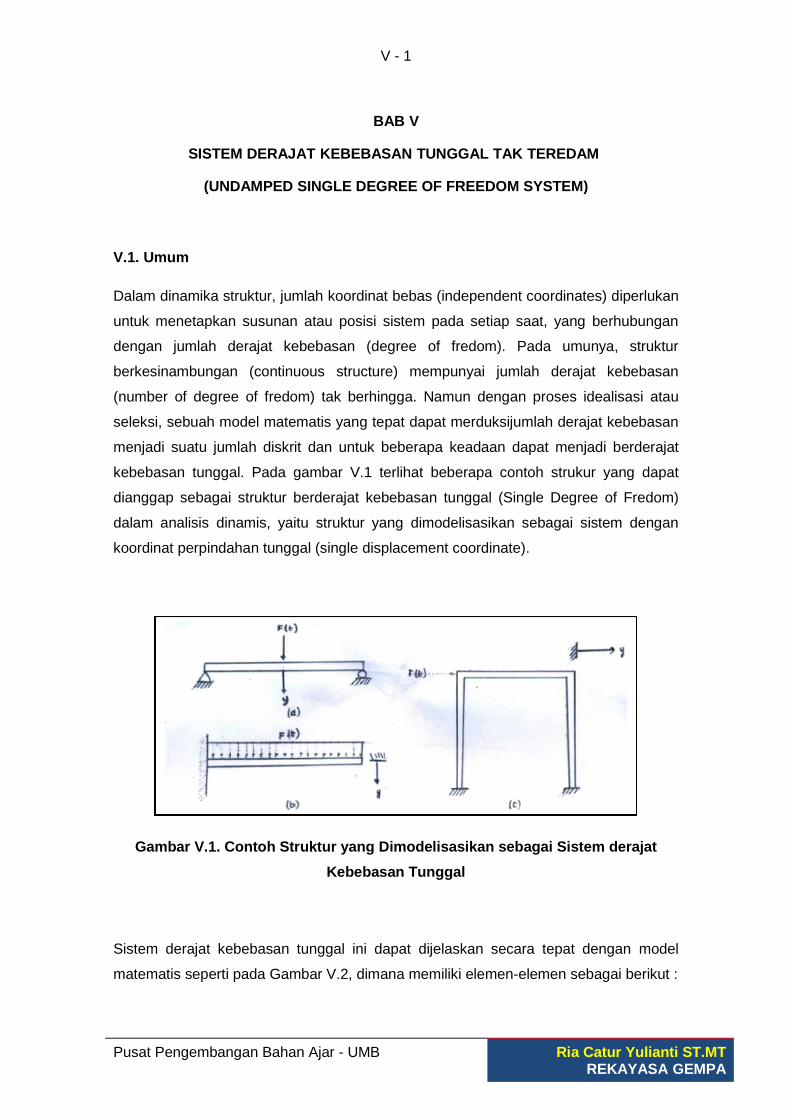
kebebasan tunggal. Pada gambar V.1 terlihat beberapa contoh strukur yang dapat
dianggap sebagai struktur berderajat kebebasan tunggal (Single Degree of Fredom)
dalam analisis dinamis, yaitu struktur yang dimodelisasikan sebagai sistem dengan
koordinat perpindahan tunggal (single displacement coordinate).
Gambar V.1. Contoh Struktur yang Dimodelisasikan se bagai Sistem derajat
Kebebasan Tunggal
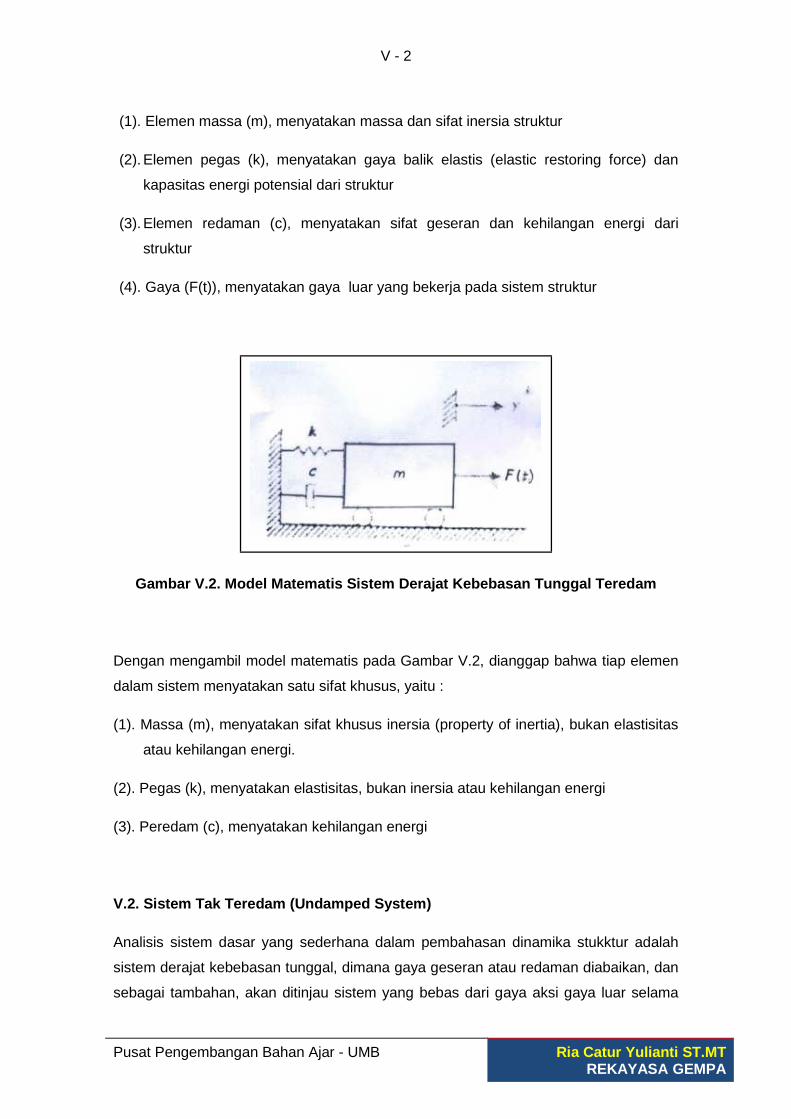
Sistem derajat kebebasan tunggal ini dapat dijelaskan secara tepat dengan model
matematis seperti pada Gambar V.2, dimana memiliki elemen-elemen sebagai berikut :
Pusat Pengembangan Bahan Ajar - UMB Ria Catur Yulianti ST.MTREKAYASA GEMPA
V - 2
(1). Elemen massa (m), menyatakan massa dan sifat inersia struktur
(2). Elemen pegas (k), menyatakan gaya balik elastis (elastic restoring force) dan
kapasitas energi potensial dari struktur
(3). Elemen redaman (c), menyatakan sifat geseran dan kehilangan energi dari
struktur
(4). Gaya (F(t)), menyatakan gaya luar yang bekerja pada sistem struktur
Gambar V.2. Model Matematis Sistem Derajat Kebebasa n Tunggal Teredam
Dengan mengambil model matematis pada Gambar V.2, dianggap bahwa tiap elemen
dalam sistem menyatakan satu sifat khusus, yaitu :
(1). Massa (m), menyatakan sifat khusus inersia (property of inertia), bukan elastisitas
atau kehilangan energi.
(2). Pegas (k), menyatakan elastisitas, bukan inersia atau kehilangan energi
(3). Peredam (c), menyatakan kehilangan energi
V.2. Sistem Tak Teredam (Undamped System)
Analisis sistem dasar yang sederhana dalam pembahasan dinamika stukktur adalah
sistem derajat kebebasan tunggal, dimana gaya geseran atau redaman diabaikan, dan
sebagai tambahan, akan ditinjau sistem yang bebas dari gaya aksi gaya luar selama
Pusat Pengembangan Bahan Ajar - UMB Ria Catur Yulianti ST.MTREKAYASA GEMPA
V - 3
bergerak atau bergetar. Pada keadaan ini, sistem tersebut hanya dikendalikan oleh
pengaruh atau kondisi yang dinamakan kondisi awal (initial condition), yaitu
perpindahan yang diberikan dalam kecepatan pada saat t=0. Sistem derjat kebebasan
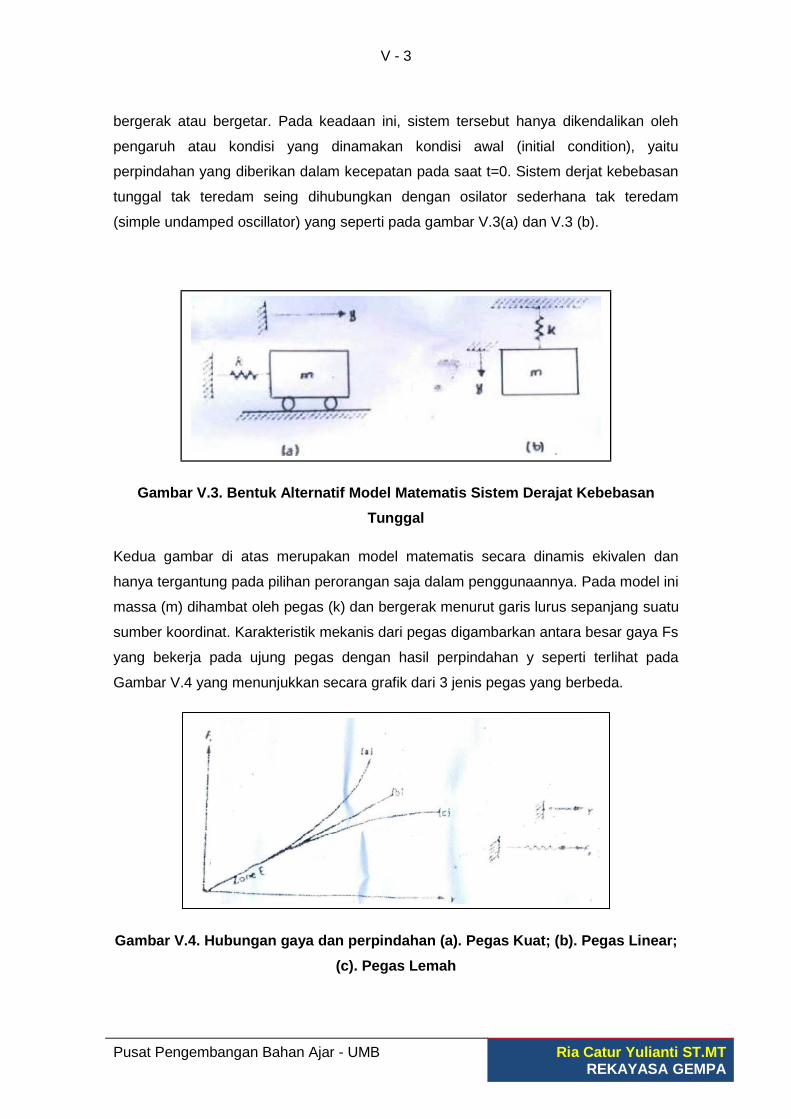
tunggal tak teredam seing dihubungkan dengan osilator sederhana tak teredam
(simple undamped oscillator) yang seperti pada gambar V.3(a) dan V.3 (b).
Gambar V.3. Bentuk Alternatif Model Matematis Siste m Derajat Kebebasan
Tunggal
Kedua gambar di atas merupakan model matematis secara dinamis ekivalen dan
hanya tergantung pada pilihan perorangan saja dalam penggunaannya. Pada model ini
massa (m) dihambat oleh pegas (k) dan bergerak menurut garis lurus sepanjang suatu
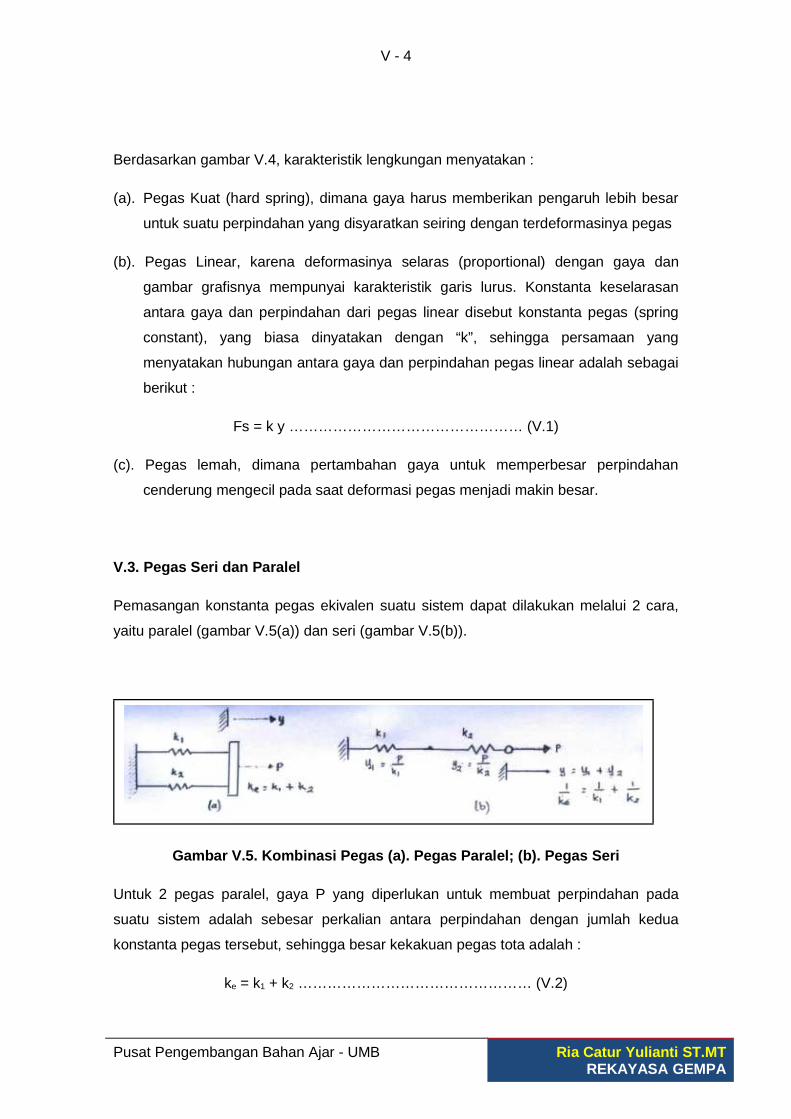
sumber koordinat. Karakteristik mekanis dari pegas digambarkan antara besar gaya Fs
yang bekerja pada ujung pegas dengan hasil perpindahan y seperti terlihat pada
Gambar V.4 yang menunjukkan secara grafik dari 3 jenis pegas yang berbeda.
Gambar V.4. Hubungan gaya dan perpindahan (a). Pega s Kuat; (b). Pegas Linear;
(c). Pegas Lemah
Pusat Pengembangan Bahan Ajar - UMB Ria Catur Yulianti ST.MTREKAYASA GEMPA
V - 4
Berdasarkan gambar V.4, karakteristik lengkungan menyatakan :
(a). Pegas Kuat (hard spring), dimana gaya harus memberikan pengaruh lebih besar
untuk suatu perpindahan yang disyaratkan seiring dengan terdeformasinya pegas
(b). Pegas Linear, karena deformasinya selaras (proportional) dengan gaya dan
gambar grafisnya mempunyai karakteristik garis lurus. Konstanta keselarasan
antara gaya dan perpindahan dari pegas linear disebut konstanta pegas (spring
constant), yang biasa dinyatakan dengan “k”, sehingga persamaan yang
menyatakan hubungan antara gaya dan perpindahan pegas linear adalah sebagai
berikut :
Fs = k y ………………………………………… (V.1)
(c). Pegas lemah, dimana pertambahan gaya untuk memperbesar perpindahan
cenderung mengecil pada saat deformasi pegas menjadi makin besar.
V.3. Pegas Seri dan Paralel
Pemasangan konstanta pegas ekivalen suatu sistem dapat dilakukan melalui 2 cara,
yaitu paralel (gambar V.5(a)) dan seri (gambar V.5(b)).
Gambar V.5. Kombinasi Pegas (a). Pegas Paralel; (b) . Pegas Seri
Untuk 2 pegas paralel, gaya P yang diperlukan untuk membuat perpindahan pada
suatu sistem adalah sebesar perkalian antara perpindahan dengan jumlah kedua
konstanta pegas tersebut, sehingga besar kekakuan pegas tota adalah :
ke = k1 + k2 ………………………………………… (V.2)
Pusat Pengembangan Bahan Ajar - UMB Ria Catur Yulianti ST.MTREKAYASA GEMPA

V - 5
Atau secara umum, dapat dirumuskan sebagai berikut :
………………………………………… (V.3)
dimana : n adalah jumlah pegas yang dipasang paralel
Sedangkan, untuk 2 pegas terpasang seri, gaya P menghasilkan perpindahan total dari
y dari ujung bebas pada susunan pegas sebesar :
………………………………………… (V.4)
Akibatnya, gaya yang diperlukan untuk membuat satu unit perpindahan (konstanta
pegas ekivalen) diberikan oleh :
………………………………………… (V.5)
Dengan mensubstitusikan y dari persamaan ini ke dalam persamaan V.4, maka
didapatkan nilai kebalikan dari konstanta pegas :
………………………………………… (V.6)
Secara umum, konstanta pegas ekivalen yang terpasang seri
…………………………………………(V.7)
dimana : n adalah jumlah pegas terpasang seri
V.4. Hukum Gerak Newton
Hubungan analisis antara perpindahan y dan waktu t, diberikan oleh Hukum Newton
Kedua untuk gerak sebagai berikut :
F = m a ………………………………………… (V.8)
dimana : F : gaya yang bekerja pada partikel massa (m)
a : resultan percepatan
Pusat Pengembangan Bahan Ajar - UMB Ria Catur Yulianti ST.MTREKAYASA GEMPA
V - 6
Persamaan V.8 dapat ditulis dalam bentuk ekivalen, dimana besaran komponennya
menurut sumbu koordinat x, y dan z, yaitu :
………………………………………… (V.9a)
………………………………………… (V.9b)
………………………………………… (V.9c)
Percepatan didefinisikan sebagai turunan kedua vektor posisi terhadap waktu; yang
berarti ketiga persamaan adalah persamaan differensial. Persamaan Hukum Newton
dapat digunakan pada benda idealis seperti partikel yang bermassa tetapi tidak
bervolume, tetapi juga dapat digunakan pada benda berdimensi yang bergerak. Benda
kaku yang bergerak pada sebuah bidang adalah simetris terhadap bidang gerak
(bidang x-z), sehingga mengakibatkan Hukum Newton perlu dimodifikasi menjadi
………………………………………… (V.10a)
………………………………………… (V.10b)
………………………………………… (V.10c)
dimana
: komponen percepatan sepanjang sumbu x dan y dari pusat benda
yang bermassa G
α : percepatan sudut
IG : momen inersia massa benda terhadap sumbu melalui pusat massa G
: jumlah momen gaya yang bekerja pada benda terhadap sumbu melalui
pusat massa G yang tegak lurus pada bidang x-y
V.5. Diagram Free Body
Pusat Pengembangan Bahan Ajar - UMB Ria Catur Yulianti ST.MTREKAYASA GEMPA
V - 7
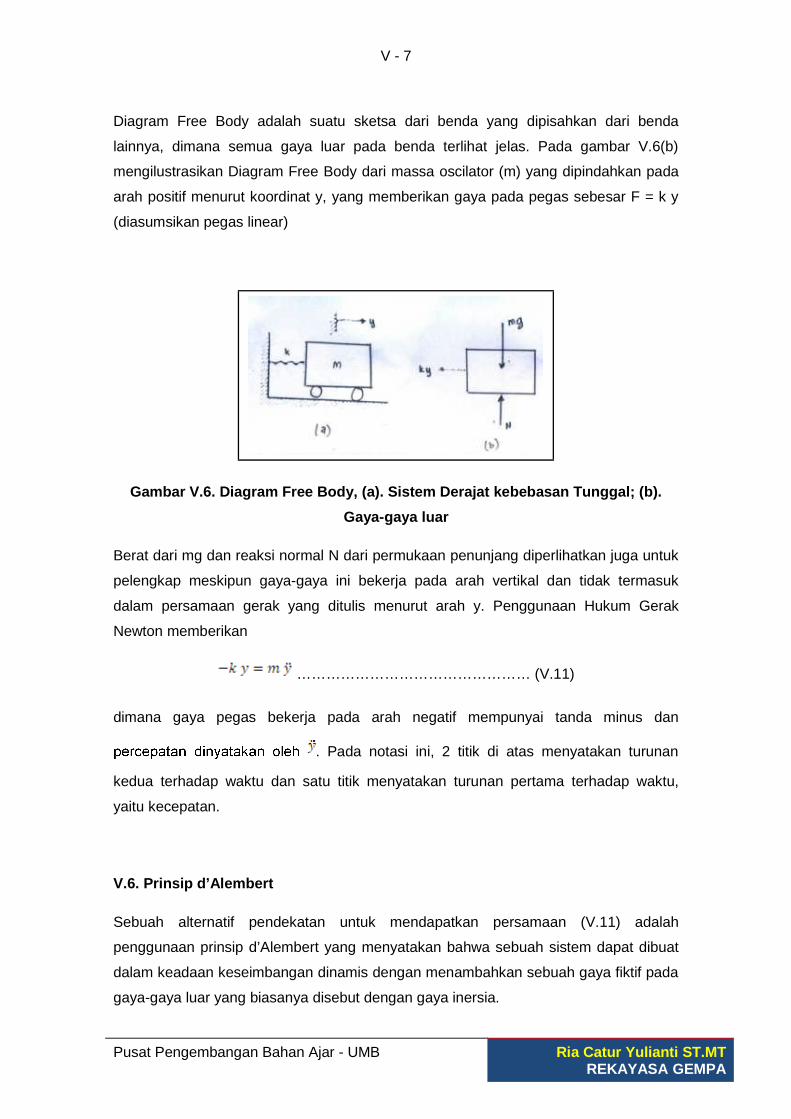
Diagram Free Body adalah suatu sketsa dari benda yang dipisahkan dari benda
lainnya, dimana semua gaya luar pada benda terlihat jelas. Pada gambar V.6(b)
mengilustrasikan Diagram Free Body dari massa oscilator (m) yang dipindahkan pada
arah positif menurut koordinat y, yang memberikan gaya pada pegas sebesar F = k y
(diasumsikan pegas linear)
Gambar V.6. Diagram Free Body, (a). Sistem Derajat kebebasan Tunggal; (b).
Gaya-gaya luar
Berat dari mg dan reaksi normal N dari permukaan penunjang diperlihatkan juga untuk
pelengkap meskipun gaya-gaya ini bekerja pada arah vertikal dan tidak termasuk
dalam persamaan gerak yang ditulis menurut arah y. Penggunaan Hukum Gerak
Newton memberikan
………………………………………… (V.11)
dimana gaya pegas bekerja pada arah negatif mempunyai tanda minus dan
. Pada notasi ini, 2 titik di atas menyatakan turunan
kedua terhadap waktu dan satu titik menyatakan turunan pertama terhadap waktu,
yaitu kecepatan.
V.6. Prinsip d’Alembert
Sebuah alternatif pendekatan untuk mendapatkan persamaan (V.11) adalah
penggunaan prinsip d’Alembert yang menyatakan bahwa sebuah sistem dapat dibuat
dalam keadaan keseimbangan dinamis dengan menambahkan sebuah gaya fiktif pada
gaya-gaya luar yang biasanya disebut dengan gaya inersia.
Pusat Pengembangan Bahan Ajar - UMB Ria Catur Yulianti ST.MTREKAYASA GEMPA
V - 8
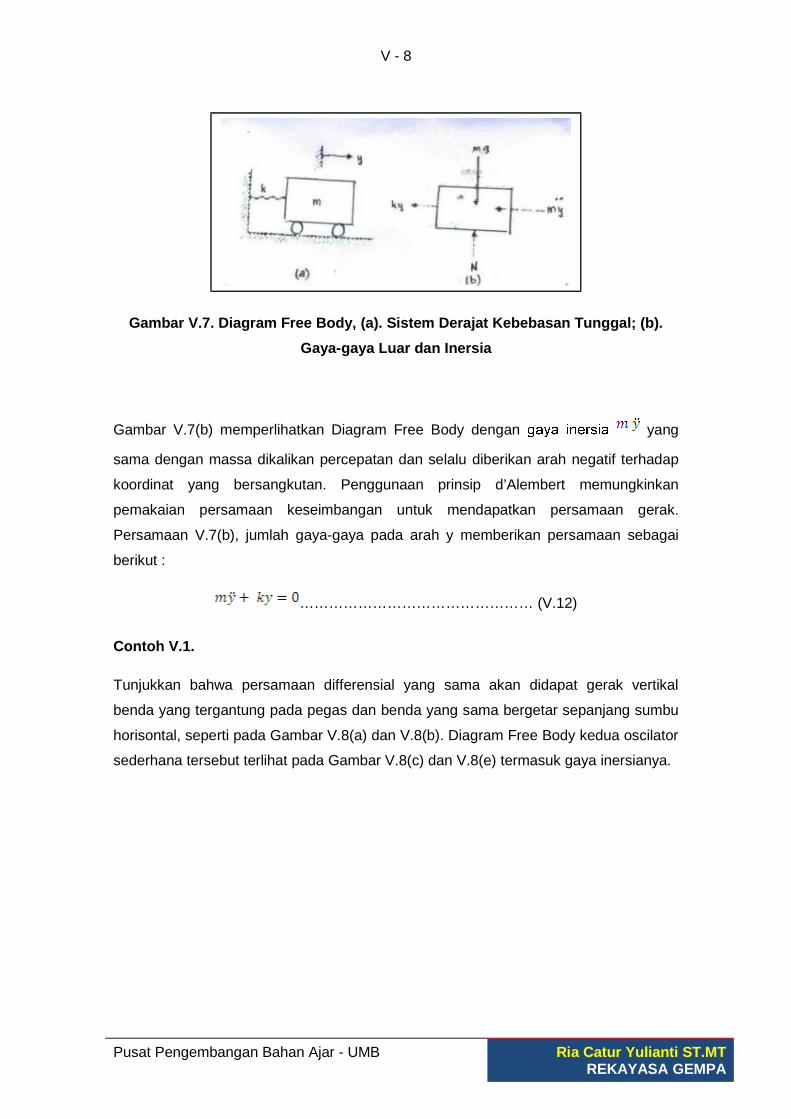
Gambar V.7. Diagram Free Body, (a). Sistem Derajat Kebebasan Tunggal; (b).
Gaya-gaya Luar dan Inersia
Gambar V.7(b) memperlihatkan Diagram Free Body dengan yang
sama dengan massa dikalikan percepatan dan selalu diberikan arah negatif terhadap
koordinat yang bersangkutan. Penggunaan prinsip d’Alembert memungkinkan
pemakaian persamaan keseimbangan untuk mendapatkan persamaan gerak.
Persamaan V.7(b), jumlah gaya-gaya pada arah y memberikan persamaan sebagai
berikut :
………………………………………… (V.12)
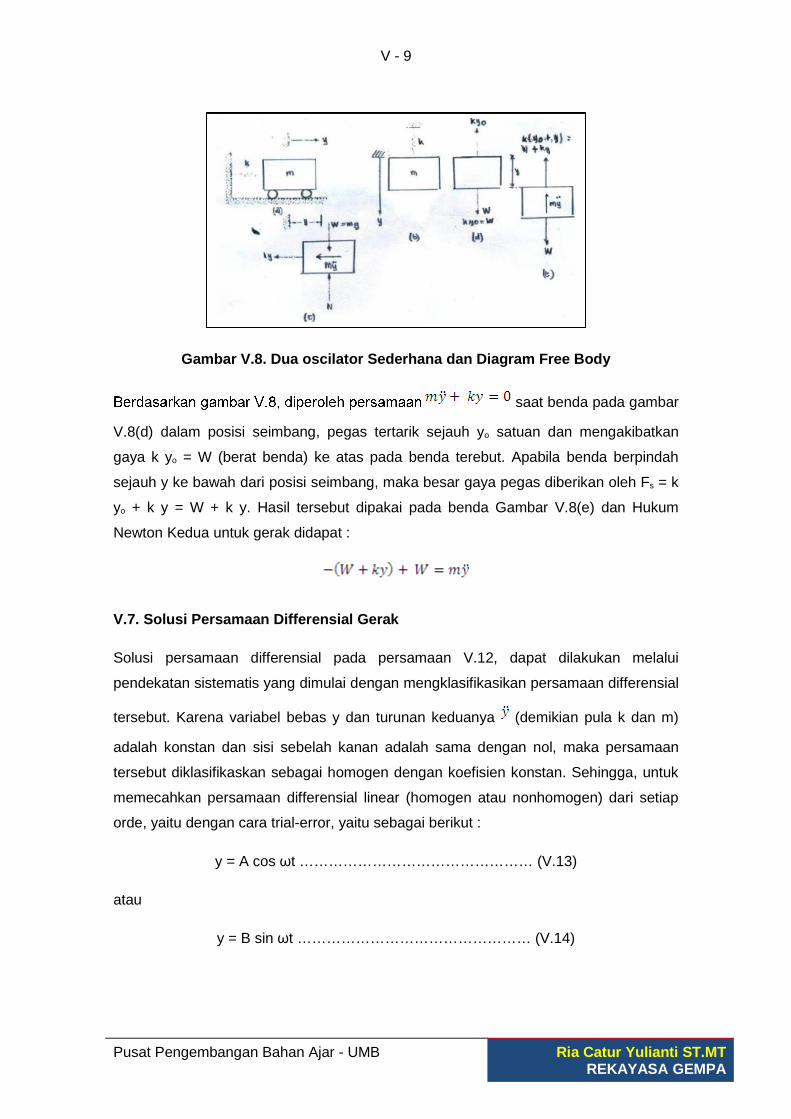
Contoh V.1.
Tunjukkan bahwa persamaan differensial yang sama akan didapat gerak vertikal
benda yang tergantung pada pegas dan benda yang sama bergetar sepanjang sumbu
horisontal, seperti pada Gambar V.8(a) dan V.8(b). Diagram Free Body kedua oscilator
sederhana tersebut terlihat pada Gambar V.8(c) dan V.8(e) termasuk gaya inersianya.
Pusat Pengembangan Bahan Ajar - UMB Ria Catur Yulianti ST.MTREKAYASA GEMPA
V - 9
Gambar V.8. Dua oscilator Sederhana dan Diagram Fre e Body
saat benda pada gambar
V.8(d) dalam posisi seimbang, pegas tertarik sejauh yo satuan dan mengakibatkan
gaya k yo = W (berat benda) ke atas pada benda terebut. Apabila benda berpindah
sejauh y ke bawah dari posisi seimbang, maka besar gaya pegas diberikan oleh Fs = k
yo + k y = W + k y. Hasil tersebut dipakai pada benda Gambar V.8(e) dan Hukum
Newton Kedua untuk gerak didapat :
V.7. Solusi Persamaan Differensial Gerak
Solusi persamaan differensial pada persamaan V.12, dapat dilakukan melalui
pendekatan sistematis yang dimulai dengan mengklasifikasikan persamaan differensial
tersebut. Karena variabel bebas y dan turunan keduanya (demikian pula k dan m)
adalah konstan dan sisi sebelah kanan adalah sama dengan nol, maka persamaan
tersebut diklasifikaskan sebagai homogen dengan koefisien konstan. Sehingga, untuk
memecahkan persamaan differensial linear (homogen atau nonhomogen) dari setiap
orde, yaitu dengan cara trial-error, yaitu sebagai berikut :
y = A cos ωt ………………………………………… (V.13)
atau
y = B sin ωt ………………………………………… (V.14)
Pusat Pengembangan Bahan Ajar - UMB Ria Catur Yulianti ST.MTREKAYASA GEMPA
V - 10
dimana: A, B : konstanta yang tergantung pada kondisi awal gerak
ω : besaran yang menyatakan besaran fisik sistem
Hasil substitusi persamaan (V.13) ke persamaan (V.12) menghasilkan :
(-mω2 + k) A cos ωt = 0 ………………………………………… (V.15)
Apabila persamaan (V.15) benar untuk setiap besaran waktu, maka faktor yang
terdapat di dalam kurung sama dengan nol, atau
………………………………………… (V.16)
Sehingga
………………………………………… (V.17)
yang disebut frekuensi natural (natural frequency) dari sistem.
Karena persamaan (V.13) dan (V.14) adalah solusi persamaan (V.12) dan persamaan
differensial adalah linear, maka superposisi kedua solusi tersebut, seperti pada
persamaan (V.18), yang merupakan solusi persamaan differensial orde dua dan
mempunyai 2 konstanta integrasi A dan B
y = A cos ωt + B sin ωt ………………………………………… (V.18)
atau
………………………………………… (V.19)
Selanjutnya, perlu ditentukan konstanta integrasi A dan B. Kedua konstanta ini dapat
ditentukan dari perpindahan yo dan kecepatan vo pada kondisi awal yaitu pada saat
t=0. Kedua kondisi ini disebut kondisi awal (initial conditions) dan masalah pemecahan
persamaan differensial dengan kondisi awal disebut problem harga awal (initial value
problem). Sesudah substitusi harga y = yo dan pada saat t = 0 pada persamaan
(V.18) dan (V.19), maka diperoleh persamaan :
Pusat Pengembangan Bahan Ajar - UMB Ria Catur Yulianti ST.MTREKAYASA GEMPA
V - 11
yo = A ………………………………………… (V.20a)
vo = B ω ………………………………………… (V.20b)
Akhirnya, substitusi A dan B dari persamaan (V.20) ke dalam persamaan (V.18)
memberikan :
………………………………………… (V.21)
dimana merupakan perpindahan y dari oscilator sederhana sebagai fungsi dari variabel
waktu t, jadi masalah struktur model oscilator sederhana dengan derajat kebebasan
tunggal telah diselesaikan.
V.8. Frekuensi dan Periode
Pengujian persamaan (V.21) memperlihatkan bahwa gerakan menurut persamaan
tersebut adalah harmonis dan oleh karena itu periodik, artinya hal tersebut dapat
dinyatakan dengan fungsi sinus atau cosinus frekuensi yang sama, sebesar ω. Periode
dengan mudah dapat ditemukan karena fungsi sinus dan cosinus mempunyai periode
2π. Periode T dari gerak ditentukan oleh
ωT = 2π ………………………………………… (V.22)
atau
………………………………………… (V.23)
Periode biasanya dinyatakan dalam detik per siklus ataupun detik tetapi dengan
pengertian “tiap siklus”. Kebalikan harga periode adalah frekuensi natural f dari
persamaan (V.22)
………………………………………… (V.24)
Frekuensi natural f selalu dinyatakan dalam siklus per second (sps). Sebab besar ω
berbeda dengan frekuensi natural f karena faktor konstan 2π, maka ω, juga sering
dianggap sebagai frekuensi natural. Untuk membedakan kedua pernyataan frekuensi
natural tersbut, ω dapat dikatakan frekuensi natural sudut atau gerak lingkaran (circle
Pusat Pengembangan Bahan Ajar - UMB Ria Catur Yulianti ST.MTREKAYASA GEMPA
V - 12
or angular). Hal ini sering dapat diketahui dari satuan/dimensi yang digunakan.
Frekuensi natural f diukur dalam siklus per detik sedangkan frekuensi natural sudut ω
selalu diberikan dalam radian per detik (rad/detik)
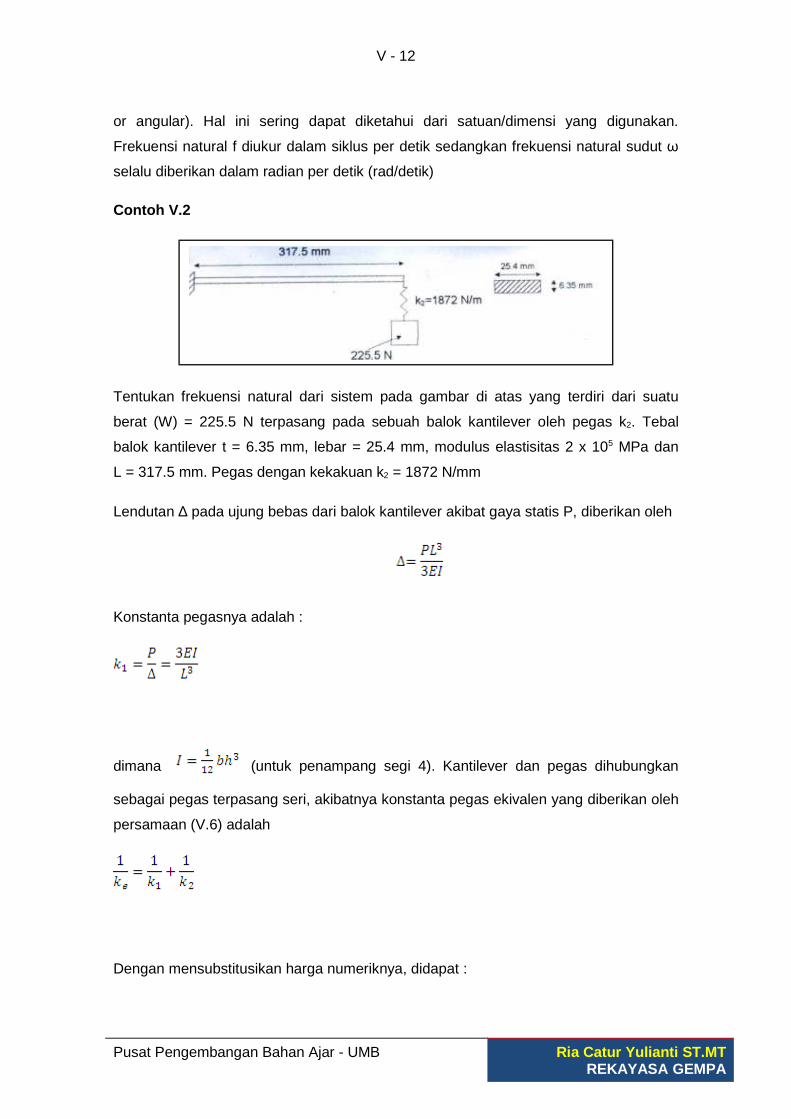
Contoh V.2
Tentukan frekuensi natural dari sistem pada gambar di atas yang terdiri dari suatu
berat (W) = 225.5 N terpasang pada sebuah balok kantilever oleh pegas k2. Tebal
balok kantilever t = 6.35 mm, lebar = 25.4 mm, modulus elastisitas 2 x 105 MPa dan
L = 317.5 mm. Pegas dengan kekakuan k2 = 1872 N/mm
Lendutan ∆ pada ujung bebas dari balok kantilever akibat gaya statis P, diberikan oleh
Konstanta pegasnya adalah :
dimana (untuk penampang segi 4). Kantilever dan pegas dihubungkan
sebagai pegas terpasang seri, akibatnya konstanta pegas ekivalen yang diberikan oleh
persamaan (V.6) adalah
Dengan mensubstitusikan harga numeriknya, didapat :
Pusat Pengembangan Bahan Ajar - UMB Ria Catur Yulianti ST.MTREKAYASA GEMPA
V - 13
dan
ke = 1592.36 N/m
Frekuensi natural diberikan oleh
Atau
V.9. Amplitudo Gerak
Bentuk ekivalen dari persamaan (V.21) yang merupakan solusi gerak getaran bebas
dari oscilator tak teredam adalah
y = C sin (ωt + α) ………………………………………… (V.25)
atau
y = C cos (ωt - β) ………………………………………… (V.26)
dimana
………………………………………… (V.27)
Pusat Pengembangan Bahan Ajar - UMB Ria Catur Yulianti ST.MTREKAYASA GEMPA
V - 14
………………………………………… (V.28)
………………………………………… (V.29)
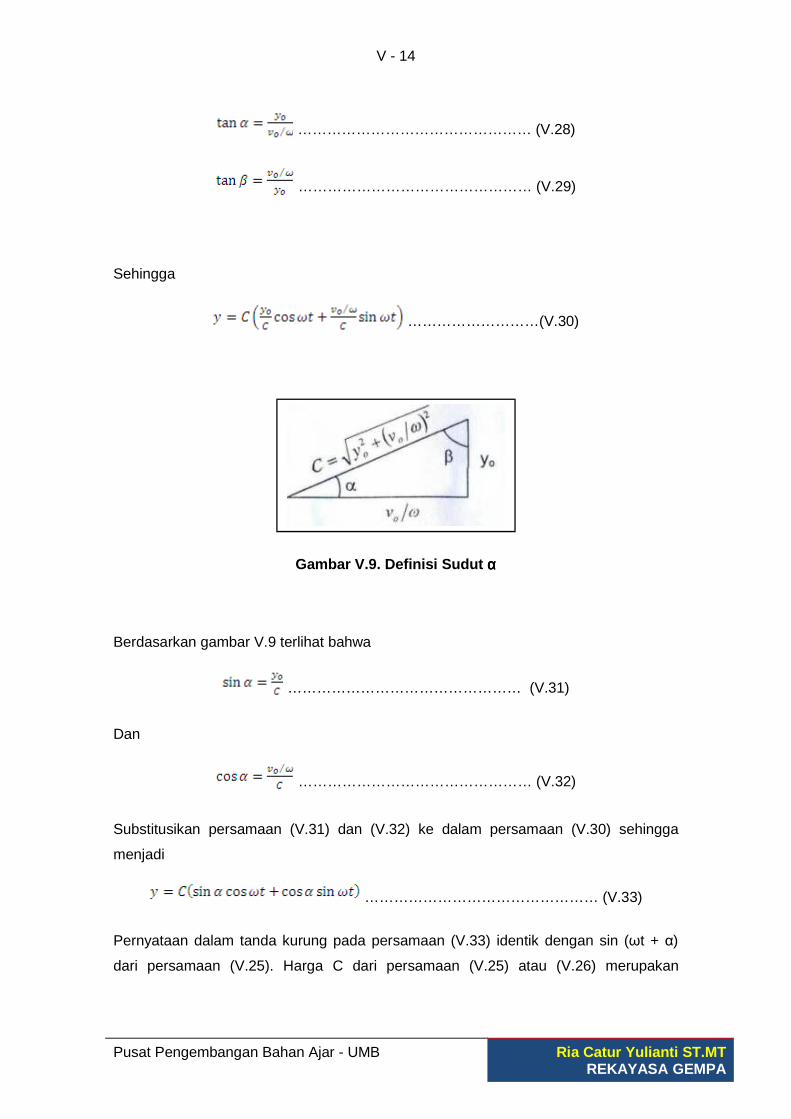
Sehingga
………………………(V.30)
Gambar V.9. Definisi Sudut αααα
Berdasarkan gambar V.9 terlihat bahwa
………………………………………… (V.31)
Dan
………………………………………… (V.32)
Substitusikan persamaan (V.31) dan (V.32) ke dalam persamaan (V.30) sehingga
menjadi
………………………………………… (V.33)
Pernyataan dalam tanda kurung pada persamaan (V.33) identik dengan sin (ωt + α)
dari persamaan (V.25). Harga C dari persamaan (V.25) atau (V.26) merupakan
Pusat Pengembangan Bahan Ajar - UMB Ria Catur Yulianti ST.MTREKAYASA GEMPA
V - 15
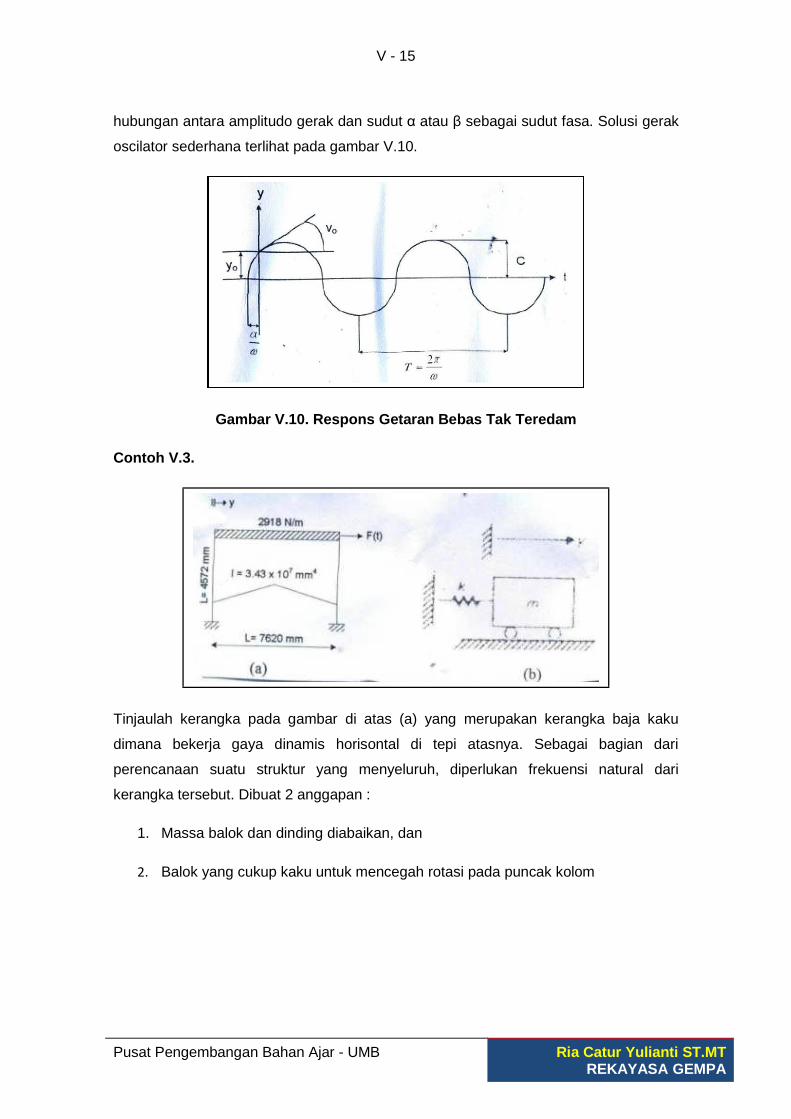
hubungan antara amplitudo gerak dan sudut α atau β sebagai sudut fasa. Solusi gerak
oscilator sederhana terlihat pada gambar V.10.
Gambar V.10. Respons Getaran Bebas Tak Teredam
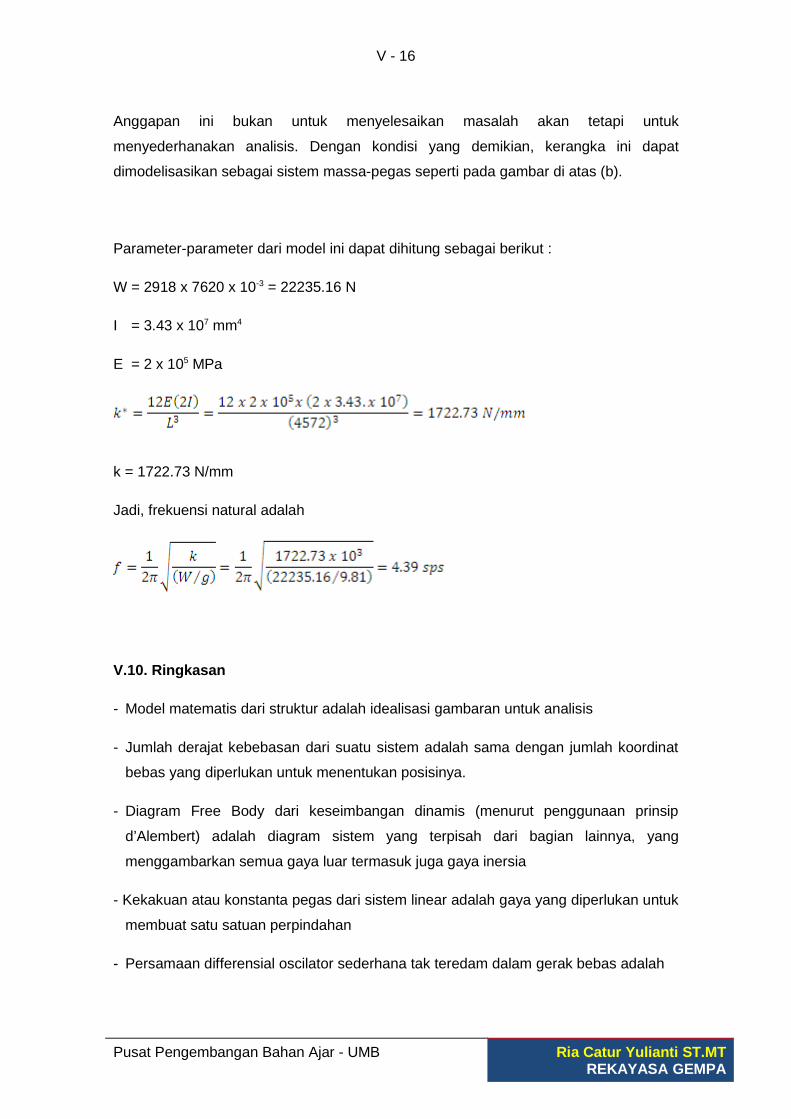
Contoh V.3.
Tinjaulah kerangka pada gambar di atas (a) yang merupakan kerangka baja kaku
dimana bekerja gaya dinamis horisontal di tepi atasnya. Sebagai bagian dari
perencanaan suatu struktur yang menyeluruh, diperlukan frekuensi natural dari
kerangka tersebut. Dibuat 2 anggapan :
1. Massa balok dan dinding diabaikan, dan
2. Balok yang cukup kaku untuk mencegah rotasi pada puncak kolom
Pusat Pengembangan Bahan Ajar - UMB Ria Catur Yulianti ST.MTREKAYASA GEMPA
V - 16
Anggapan ini bukan untuk menyelesaikan masalah akan tetapi untuk
menyederhanakan analisis. Dengan kondisi yang demikian, kerangka ini dapat
dimodelisasikan sebagai sistem massa-pegas seperti pada gambar di atas (b).
Parameter-parameter dari model ini dapat dihitung sebagai berikut :
W = 2918 x 7620 x 10-3 = 22235.16 N
I = 3.43 x 107 mm4
E = 2 x 105 MPa
k = 1722.73 N/mm
Jadi, frekuensi natural adalah
V.10. Ringkasan
- Model matematis dari struktur adalah idealisasi gambaran untuk analisis
- Jumlah derajat kebebasan dari suatu sistem adalah sama dengan jumlah koordinat
bebas yang diperlukan untuk menentukan posisinya.
- Diagram Free Body dari keseimbangan dinamis (menurut penggunaan prinsip
d’Alembert) adalah diagram sistem yang terpisah dari bagian lainnya, yang
menggambarkan semua gaya luar termasuk juga gaya inersia
- Kekakuan atau konstanta pegas dari sistem linear adalah gaya yang diperlukan untuk
membuat satu satuan perpindahan
- Persamaan differensial oscilator sederhana tak teredam dalam gerak bebas adalah
Pusat Pengembangan Bahan Ajar - UMB Ria Catur Yulianti ST.MTREKAYASA GEMPA

V - 17
Dan solusi umumnya
y = A cos ωt + B sin ωt
dimana A dan B adalah konstanta integrasi yang ditentukan dari kondisi awal :
yo = A
vo = B ω
adalah frekuensi natural dalam rad/s
adalah periode natural dalam detik
adalah frekuensi natural dalam siklus per second (sps)
Persamaan gerak dapat ditulis dalam beberapa bentuk
y = C sin (ωt + α)
atau
y = C cos (ωt - β)
dimana :
Pusat Pengembangan Bahan Ajar - UMB Ria Catur Yulianti ST.MTREKAYASA GEMPA

V - 18
Pusat Pengembangan Bahan Ajar - UMB Ria Catur Yulianti ST.MTREKAYASA GEMPA