kr03mobile robot 2 - relifline.files.wordpress.com · palo alto play bot murada m-tran ii group...
TRANSCRIPT

TH22452 ROBOTIKA 33
Cara Berjalan

TH22452 ROBOTIKA 34
Cara berjalan
TH22452 ROBOTIKA 35
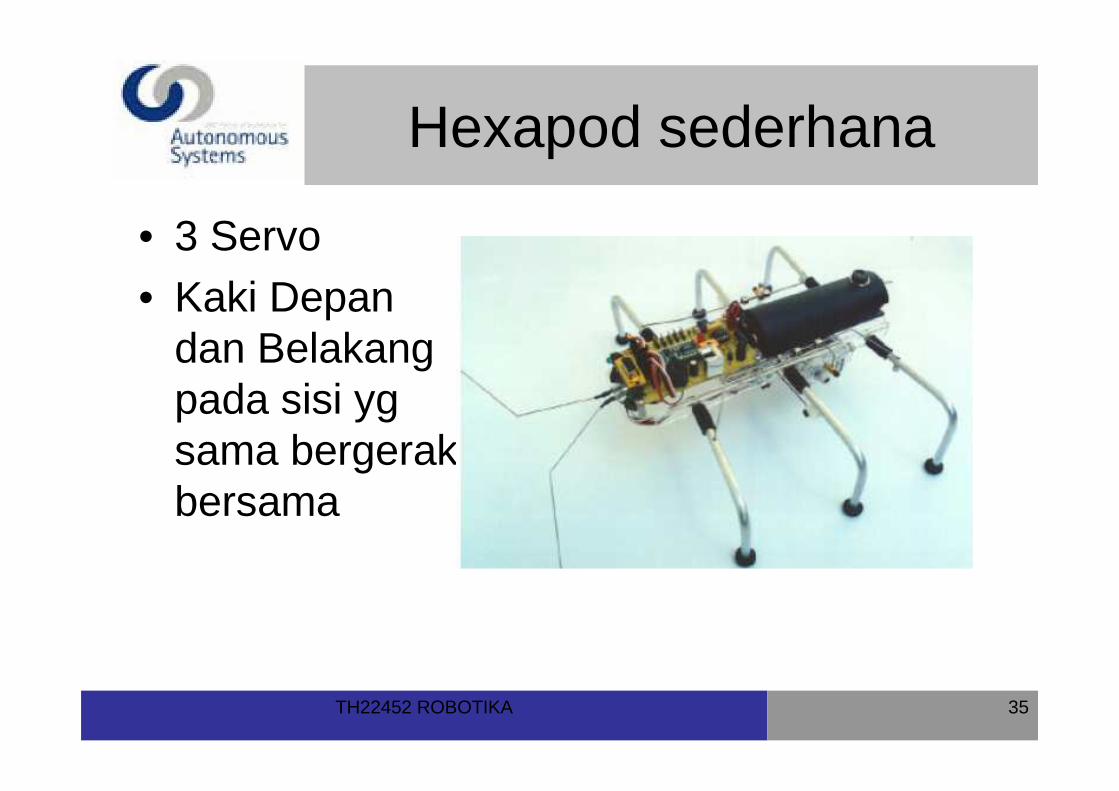
Hexapod sederhana
• 3 Servo• Kaki Depan
dan Belakangpada sisi ygsama bergerakbersama

TH22452 ROBOTIKA 36
Hexapod Sederhana
TH22452 ROBOTIKA 37
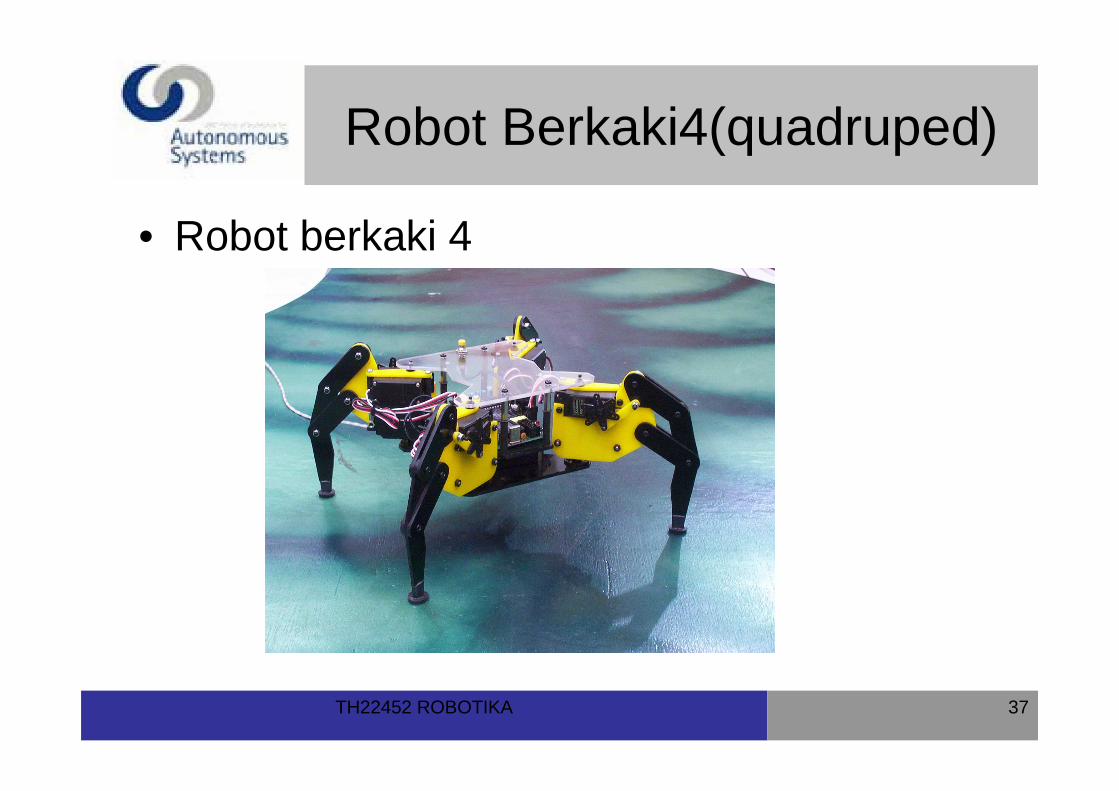
Robot Berkaki4(quadruped)
• Robot berkaki 4
TH22452 ROBOTIKA 38
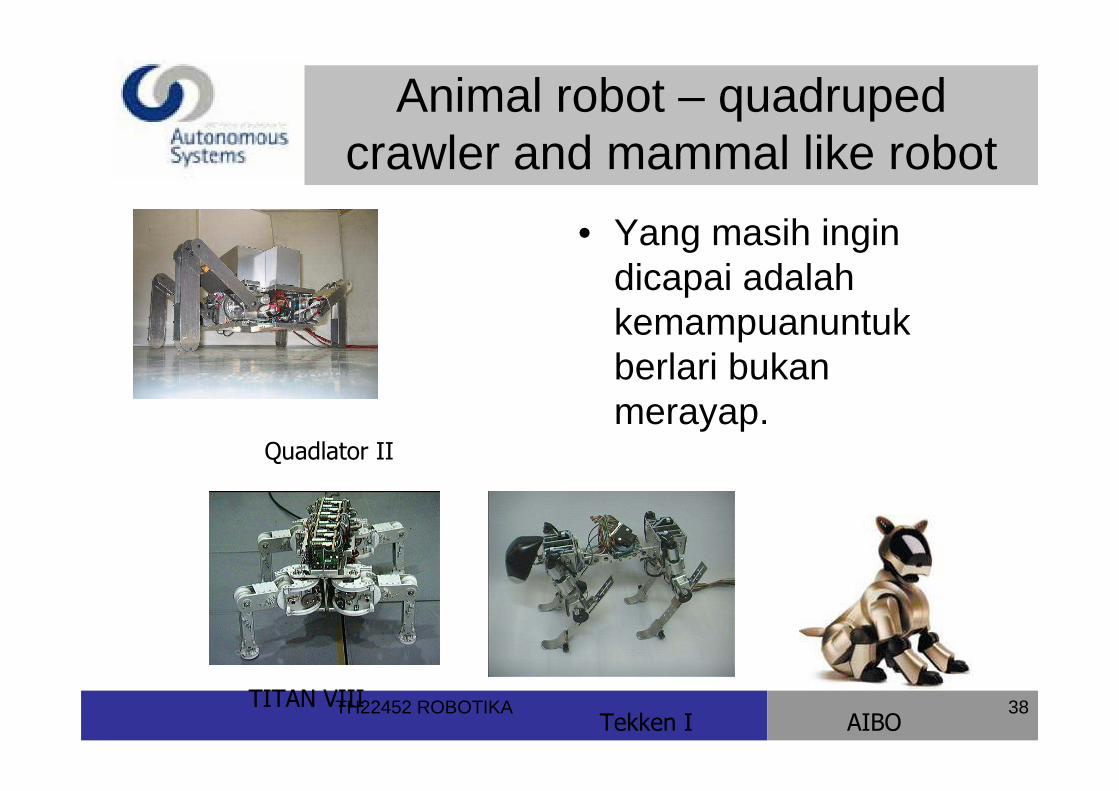
Animal robot – quadruped crawler and mammal like robot
• Yang masih ingindicapai adalahkemampuanuntukberlari bukanmerayap.
Quadlator II
TITAN VIIITekken I AIBO
TH22452 ROBOTIKA 39
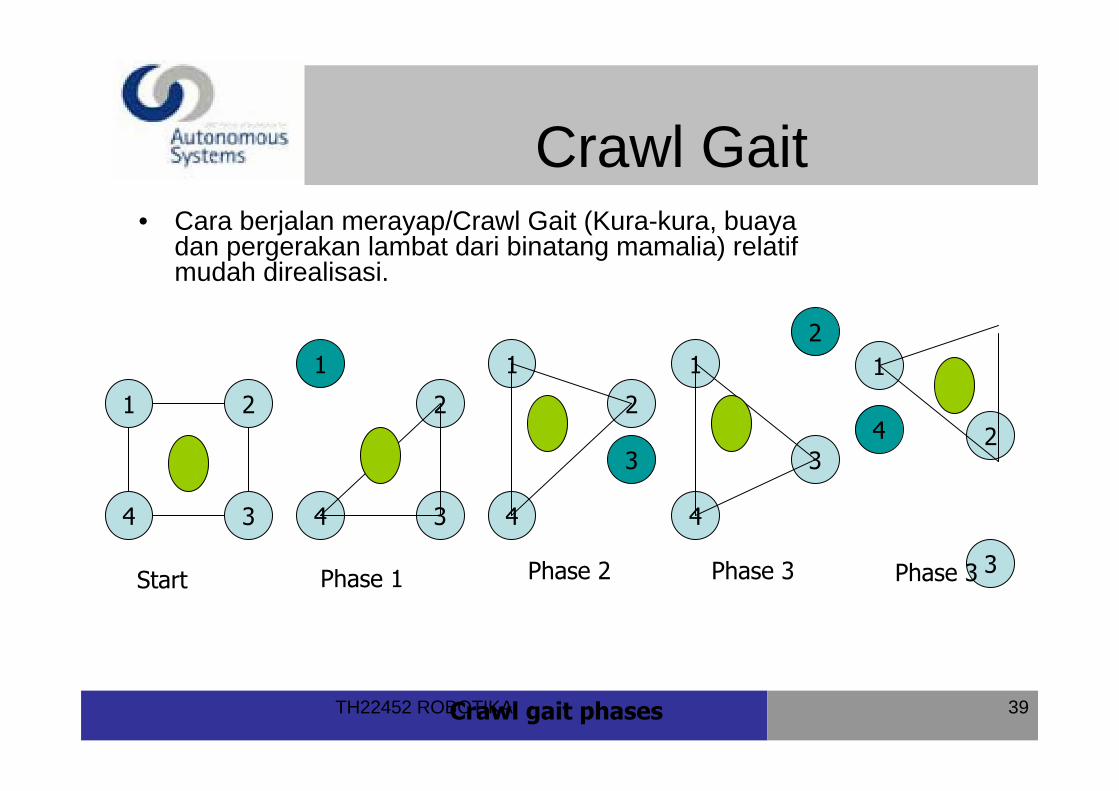
Crawl Gait• Cara berjalan merayap/Crawl Gait (Kura-kura, buaya
dan pergerakan lambat dari binatang mamalia) relatifmudah direalisasi.
2
3
1 2
4 3
1
2
4 3
1
2
4
3
1
2
4
3
Start Phase 1 Phase 2 Phase 3
1
4
Phase 3
Crawl gait phases
TH22452 ROBOTIKA 40
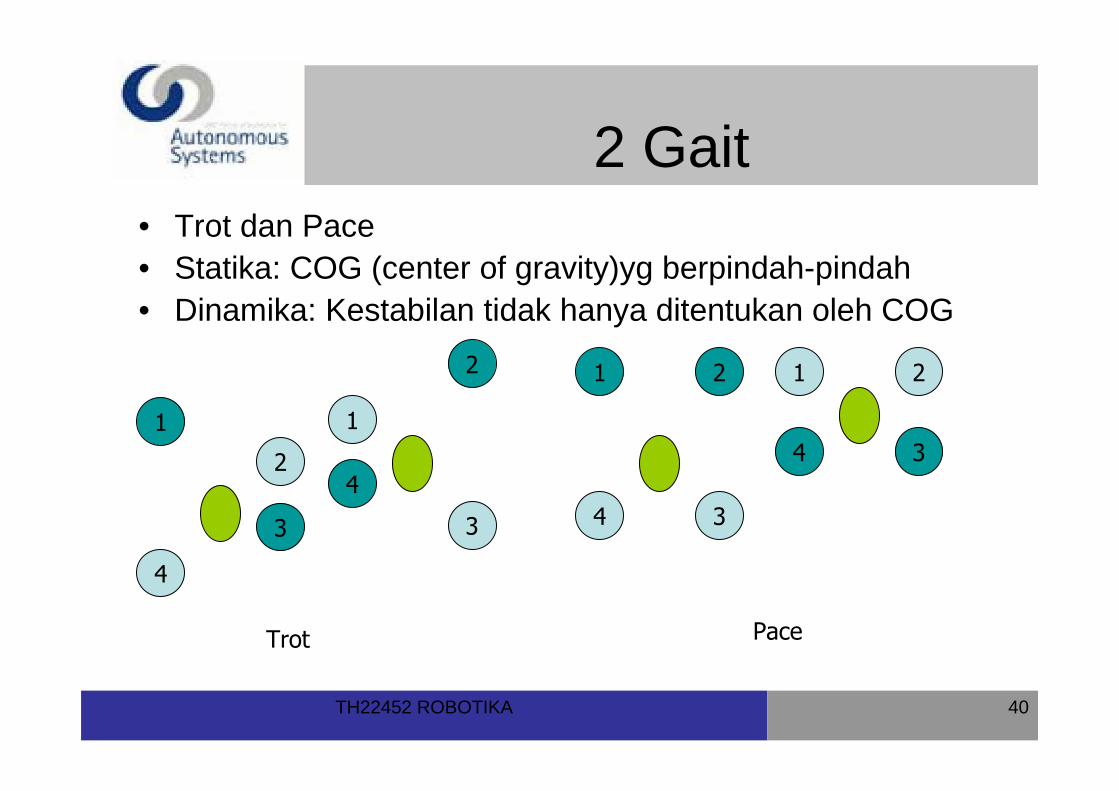
2 Gait• Trot dan Pace• Statika: COG (center of gravity)yg berpindah-pindah• Dinamika: Kestabilan tidak hanya ditentukan oleh COG
1
2
4
3
1
2
4
3
1 2
4 3
1 2
4 3
Trot Pace
TH22452 ROBOTIKA 41
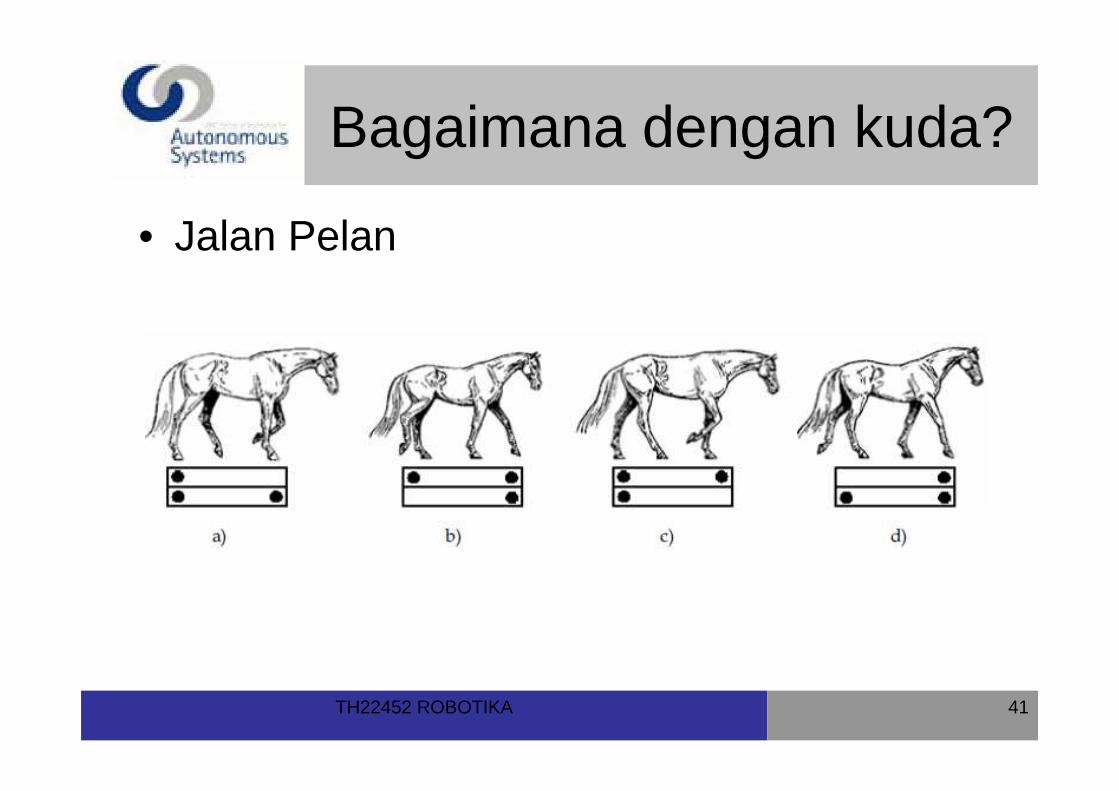
Bagaimana dengan kuda?
• Jalan Pelan
TH22452 ROBOTIKA 42
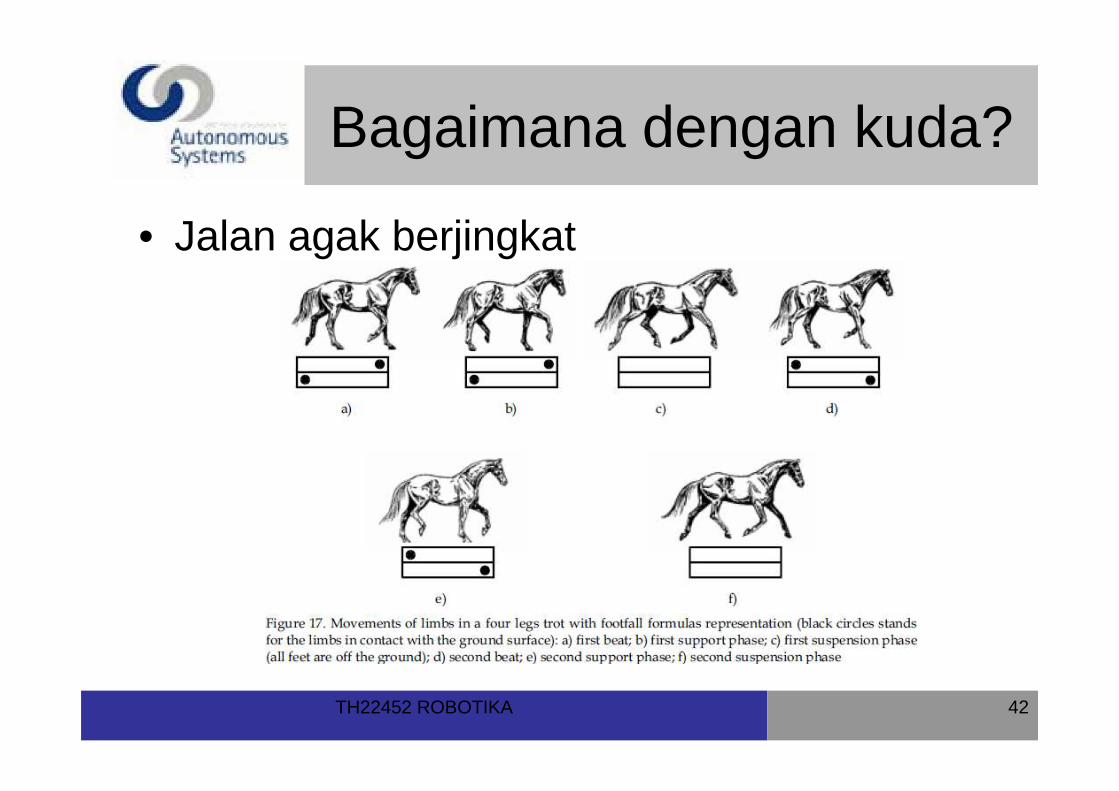
Bagaimana dengan kuda?
• Jalan agak berjingkat
TH22452 ROBOTIKA 43
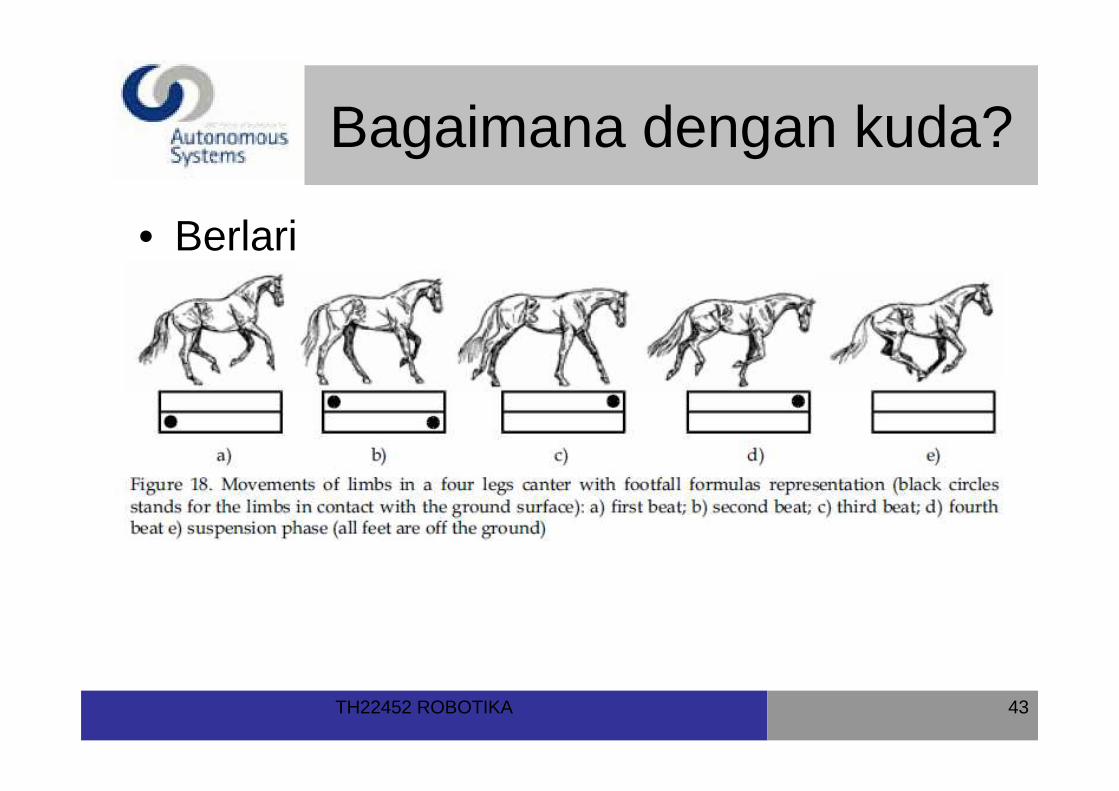
Bagaimana dengan kuda?
• Berlari
TH22452 ROBOTIKA 44
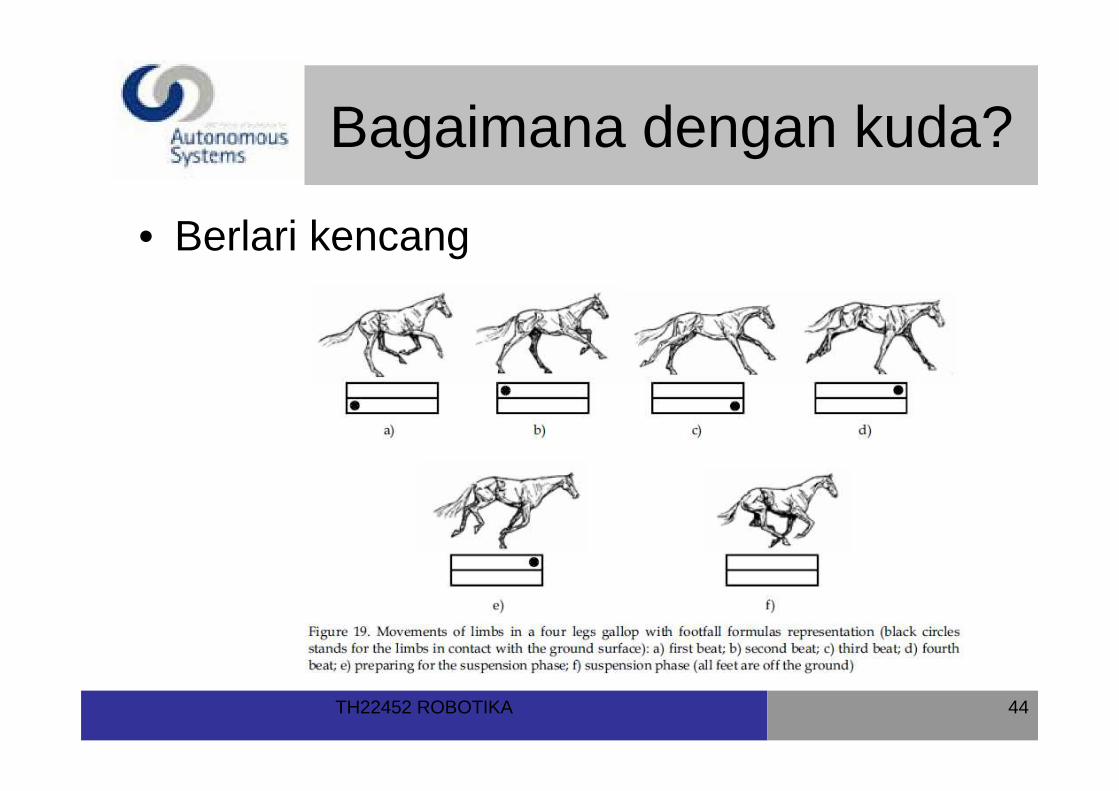
Bagaimana dengan kuda?
• Berlari kencang
TH22452 ROBOTIKA 45
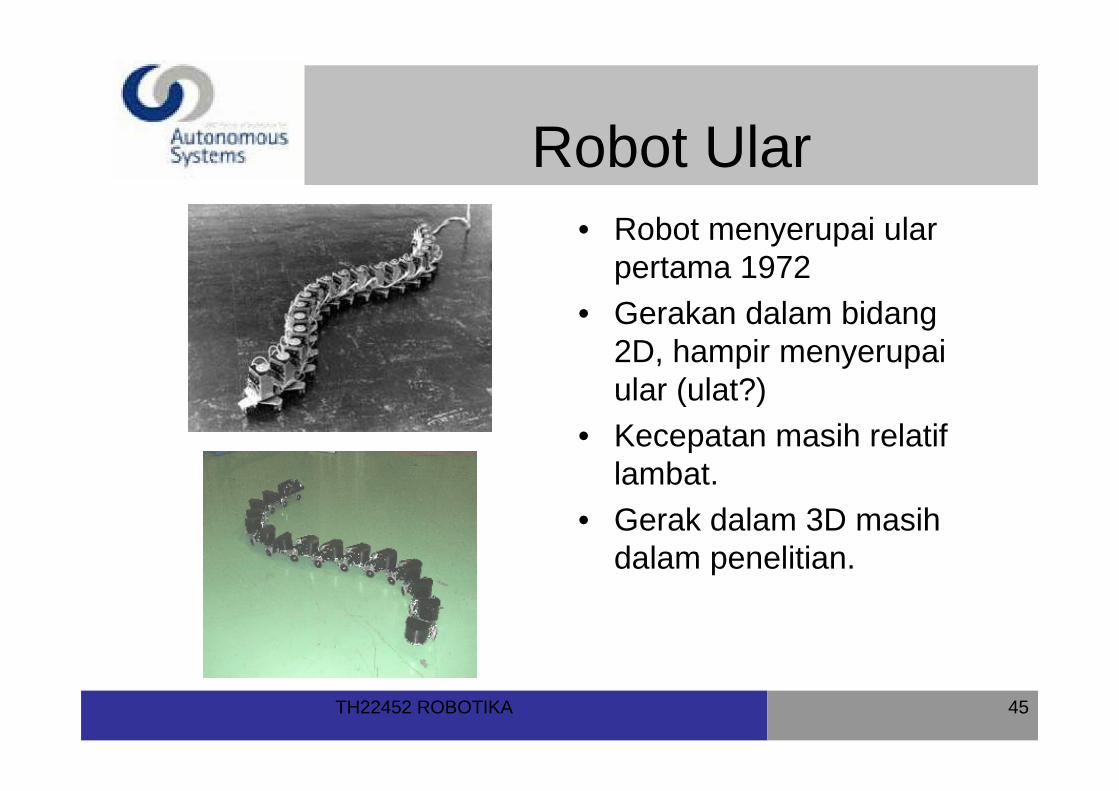
Robot Ular• Robot menyerupai ular
pertama 1972• Gerakan dalam bidang
2D, hampir menyerupaiular (ulat?)
• Kecepatan masih relatiflambat.
• Gerak dalam 3D masihdalam penelitian.
TH22452 ROBOTIKA 46
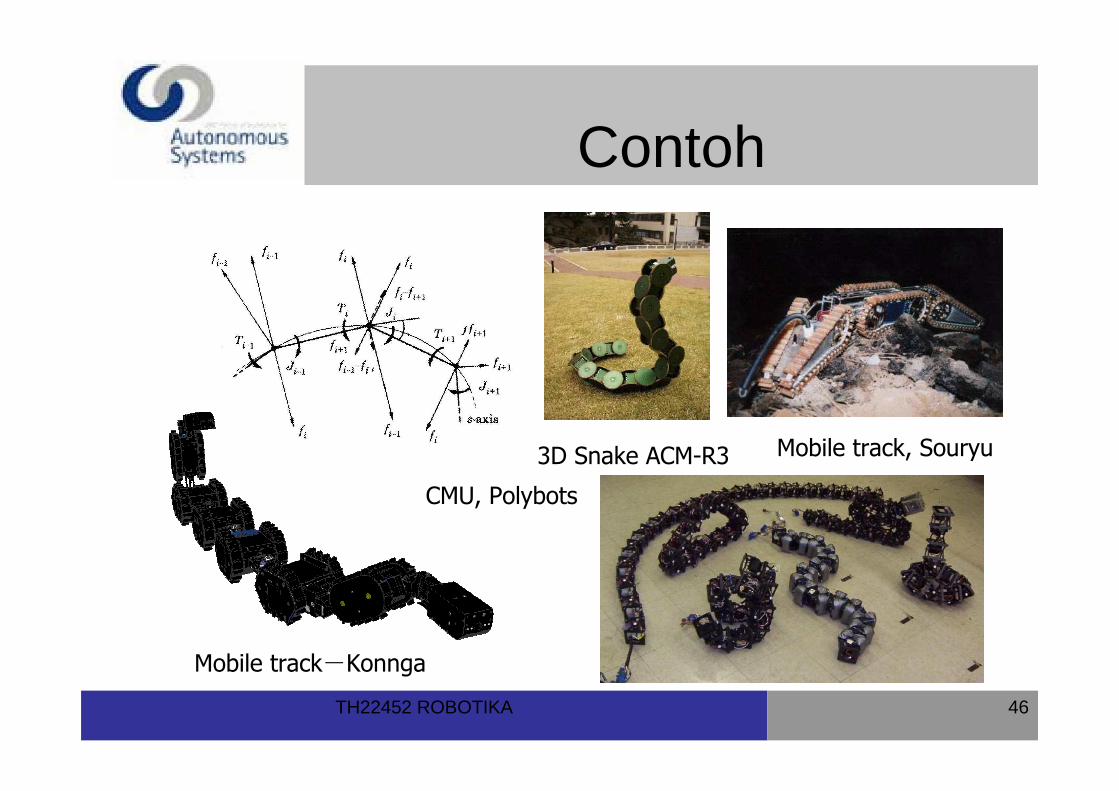
Contoh
3D Snake ACM-R3
Mobile track-Konnga
CMU, Polybots
Mobile track, Souryu
TH22452 ROBOTIKA 47
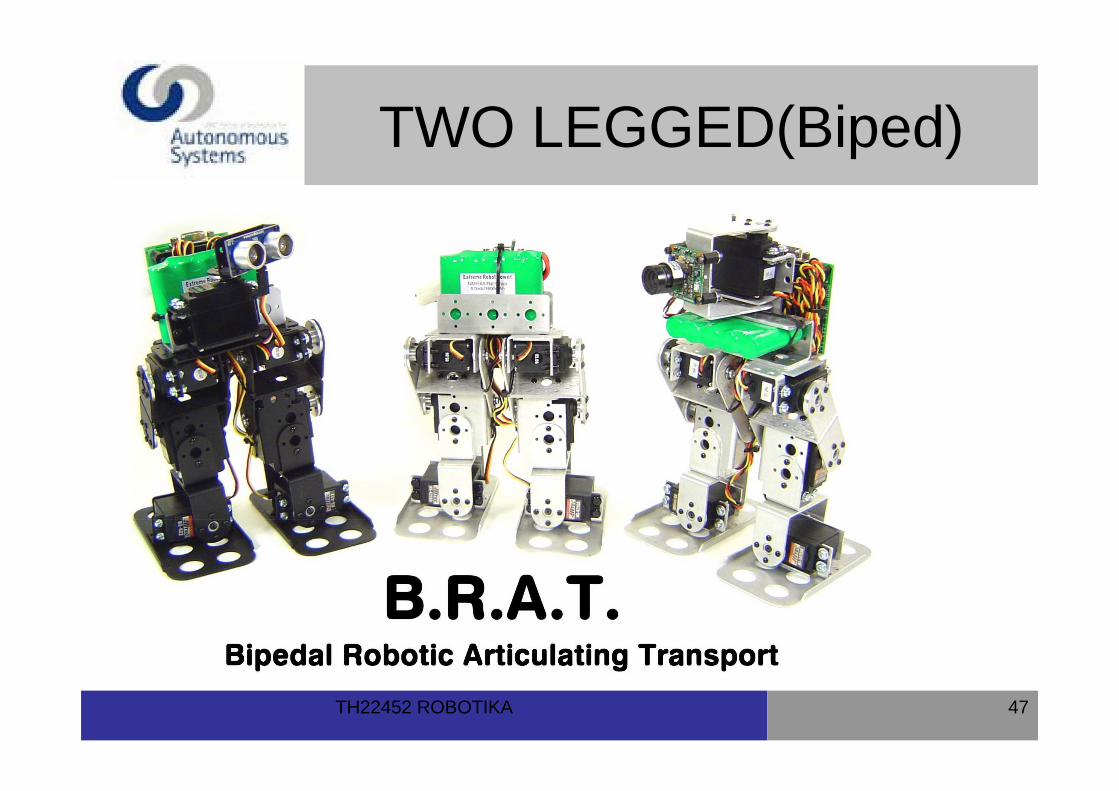
TWO LEGGED(Biped)
TH22452 ROBOTIKA 48
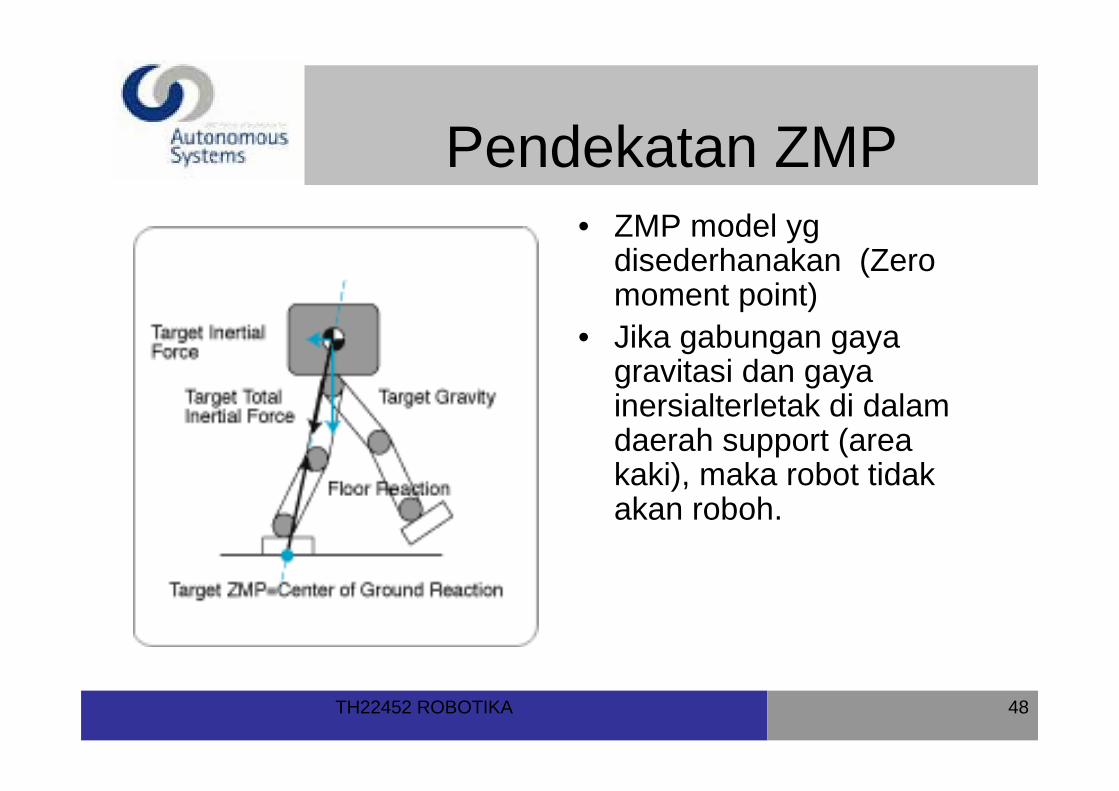
Pendekatan ZMP• ZMP model yg
disederhanakan (Zero moment point)
• Jika gabungan gayagravitasi dan gayainersialterletak di dalamdaerah support (area kaki), maka robot tidakakan roboh.
TH22452 ROBOTIKA 49
Cara Berjalan

TH22452 ROBOTIKA 50
Humanoid robot• Salah satu jenis robot yg kompleks• Dinamika: Kesulitan dalam berjalan dan berlari, koordinasi gerak 2 tangan,
koordinasi gerak seluruh tubuh: duduk, berdiri dan bangung setelah jatuh. • Tingkat kecerdasan: pengenalan pola, pembuatan keputusan dan pemrosesan
multi informasi.• Implementasi: DOF yg tinggi, multi sensing, high performance processing, real
time control

TH22452 ROBOTIKA 51
Pendekatan sederhana

TH22452 ROBOTIKA 52
Kit Robot
• Tersedia dalam bentuk kit• Terdiri dari sejumlah servo• Disertai software yg dapat
digunakan untuk menyusungerakan yg diinginkan
TH22452 ROBOTIKA 53
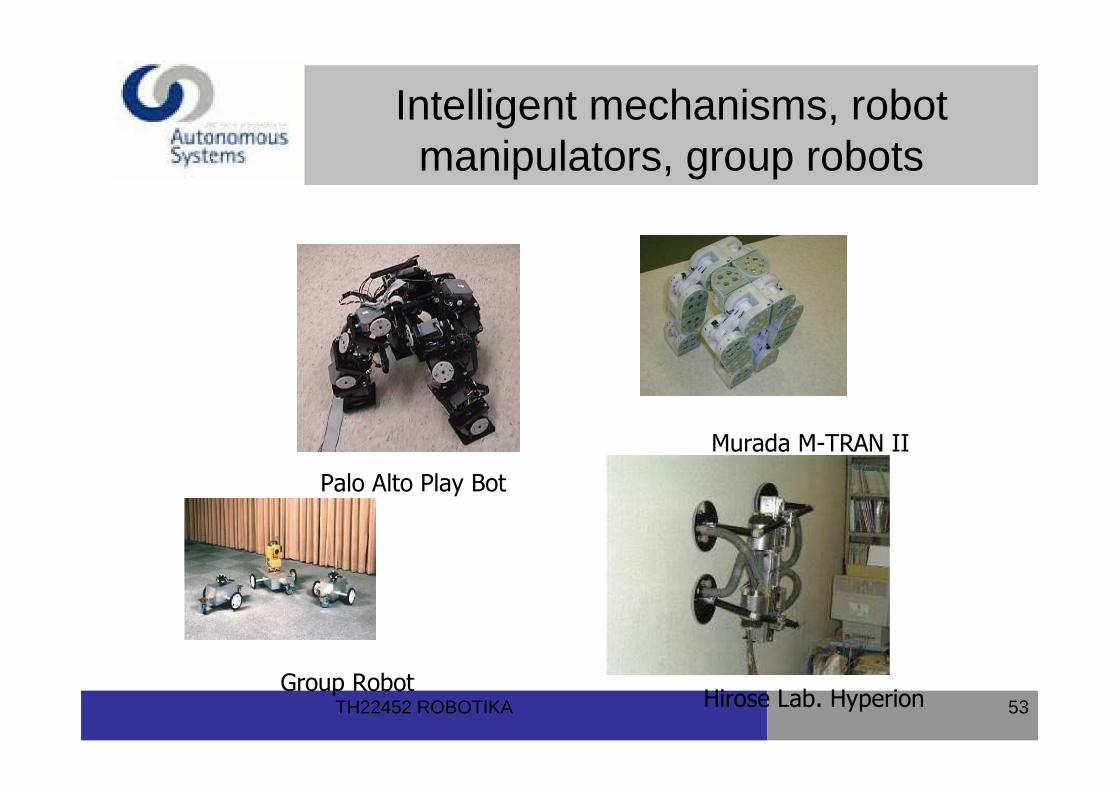
Intelligent mechanisms, robot manipulators, group robots
Palo Alto Play Bot
Murada M-TRAN II
Group RobotHirose Lab. Hyperion
TH22452 ROBOTIKA 54
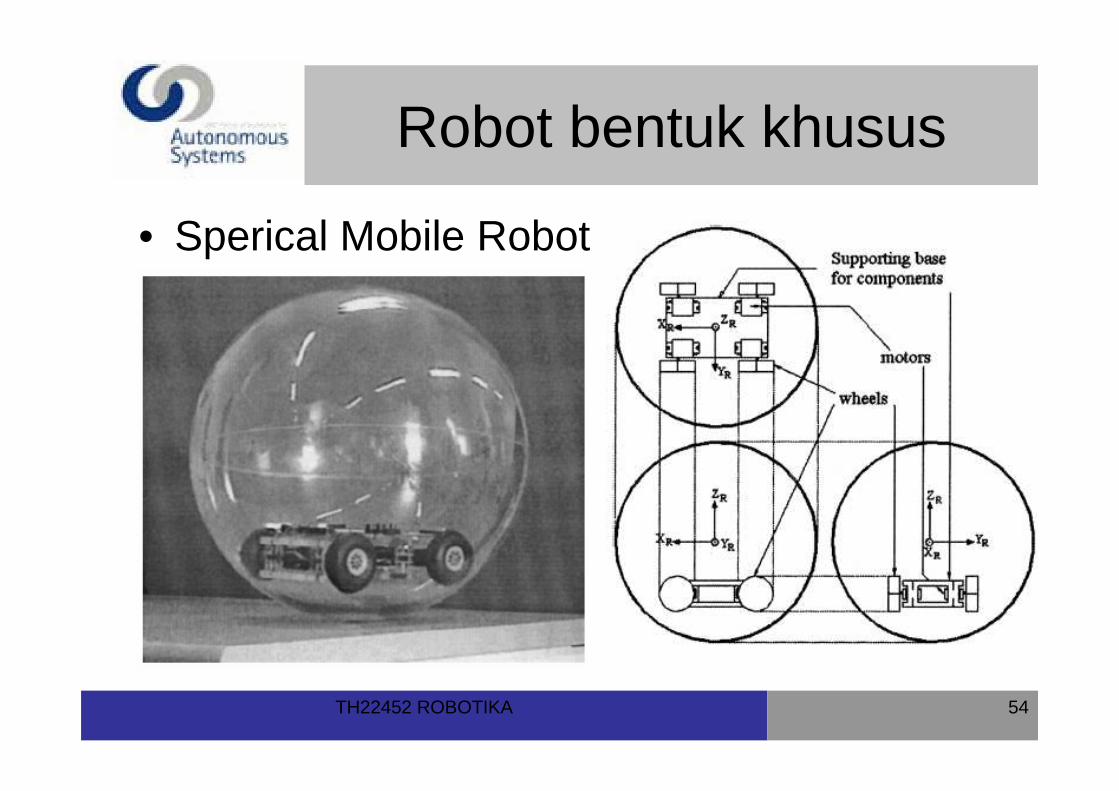
Robot bentuk khusus
• Sperical Mobile Robot
TH22452 ROBOTIKA 55
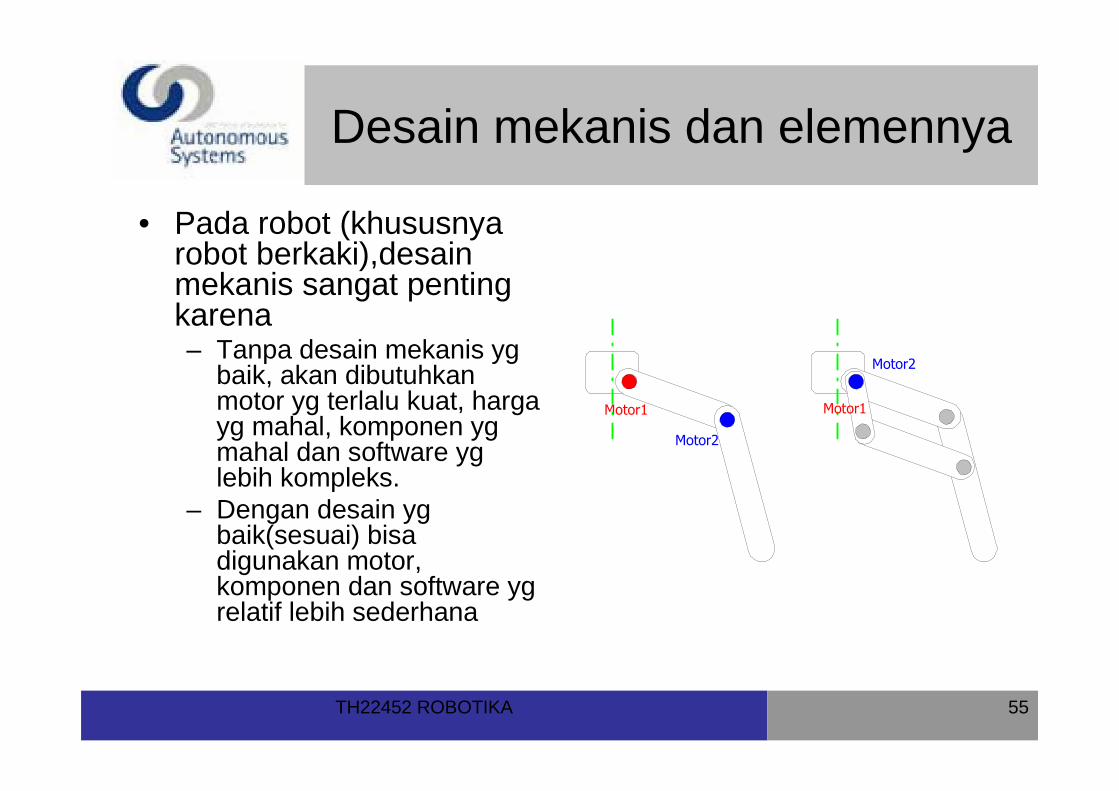
Desain mekanis dan elemennya
• Pada robot (khususnyarobot berkaki),desainmekanis sangat pentingkarena– Tanpa desain mekanis yg
baik, akan dibutuhkanmotor yg terlalu kuat, hargayg mahal, komponen ygmahal dan software yglebih kompleks.
– Dengan desain ygbaik(sesuai) bisadigunakan motor, komponen dan software ygrelatif lebih sederhana
Motor1
Motor2
Motor2
Motor1
TH22452 ROBOTIKA 56
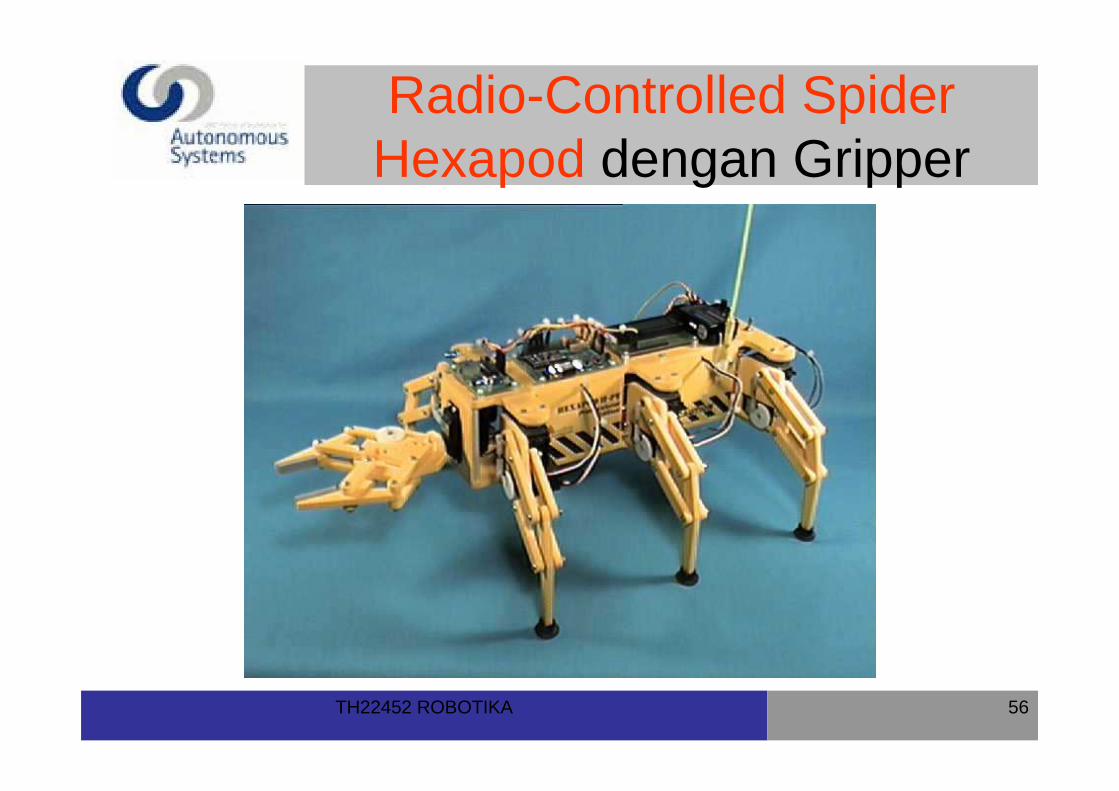
Radio-Controlled Spider Hexapod dengan Gripper
TH22452 ROBOTIKA 57
TH22452 ROBOTIKA 58
TH22452 ROBOTIKA 59
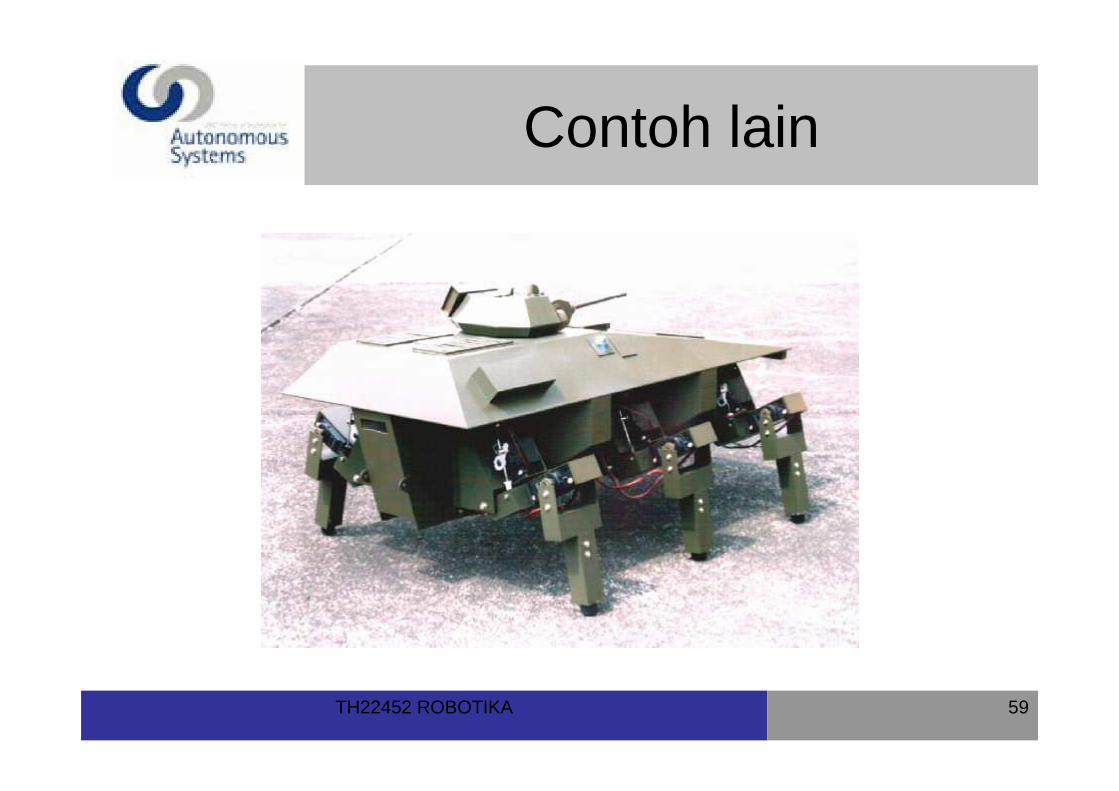
Contoh lain
TH22452 ROBOTIKA 60
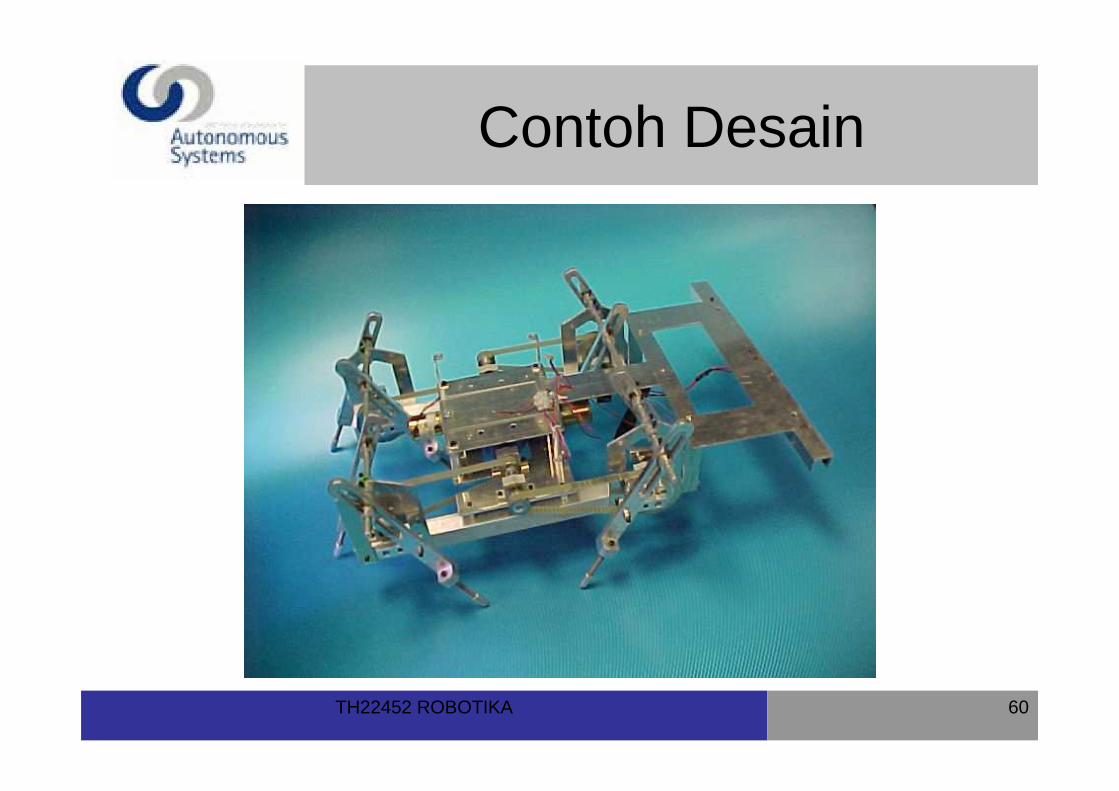
Contoh Desain
TH22452 ROBOTIKA 61
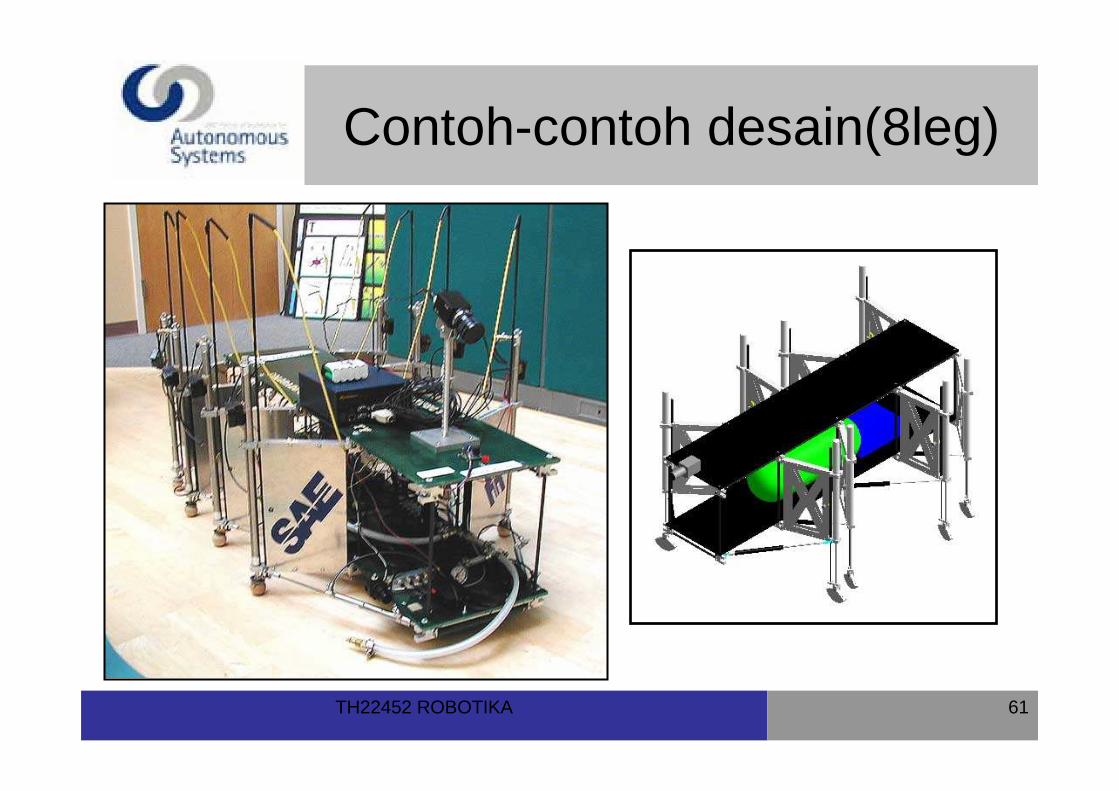
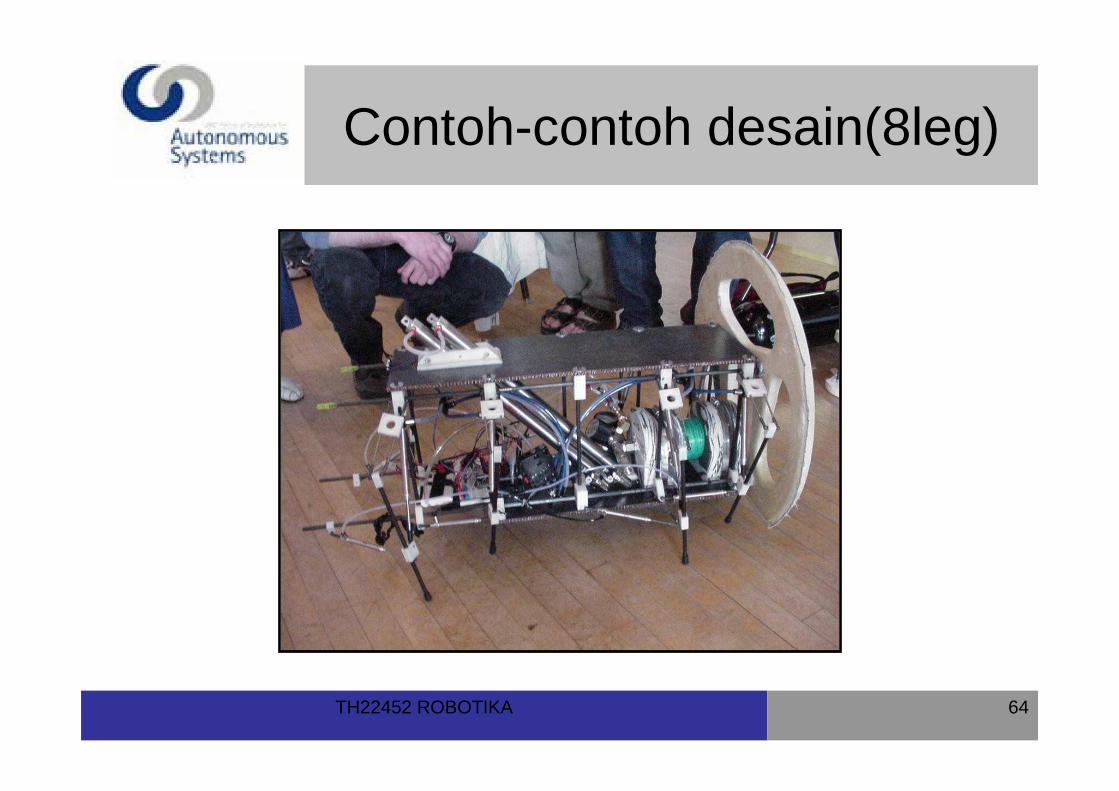
Contoh-contoh desain(8leg)
TH22452 ROBOTIKA 62
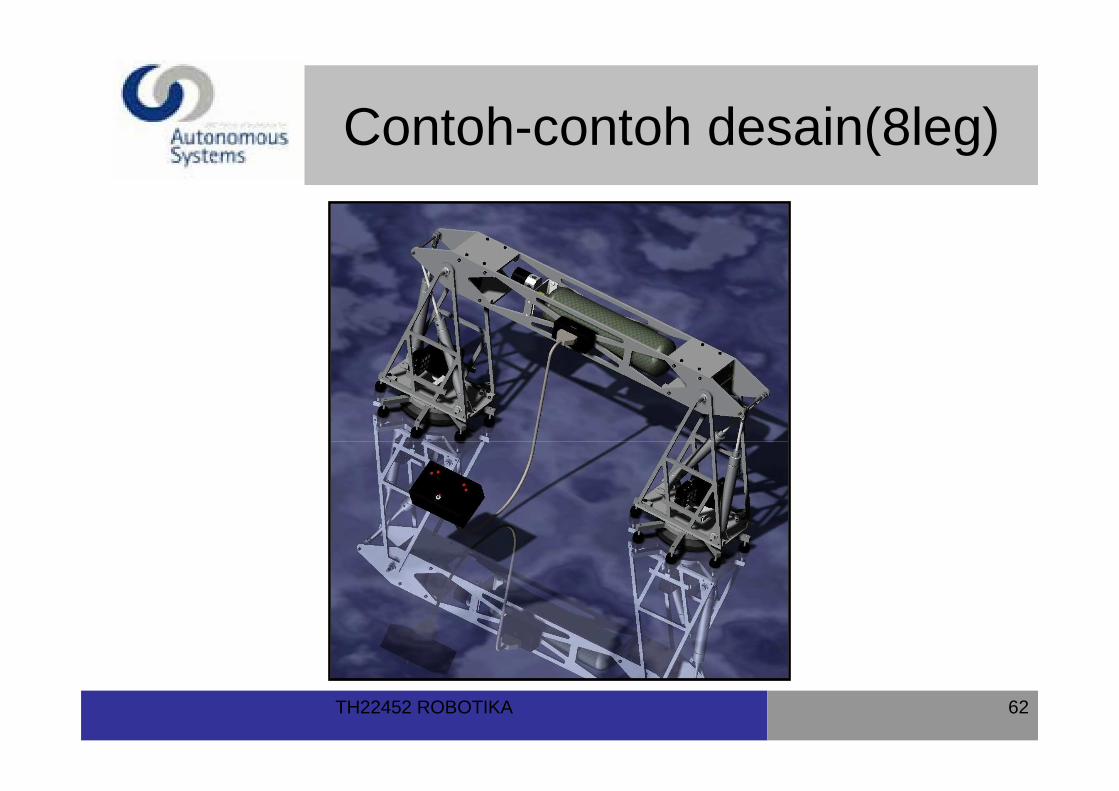
Contoh-contoh desain(8leg)

TH22452 ROBOTIKA 63
Contoh-contoh desain(8leg)
TH22452 ROBOTIKA 64
Contoh-contoh desain(8leg)

TH22452 ROBOTIKA 65
Contoh Desain
• 2 servo
TH22452 ROBOTIKA 66
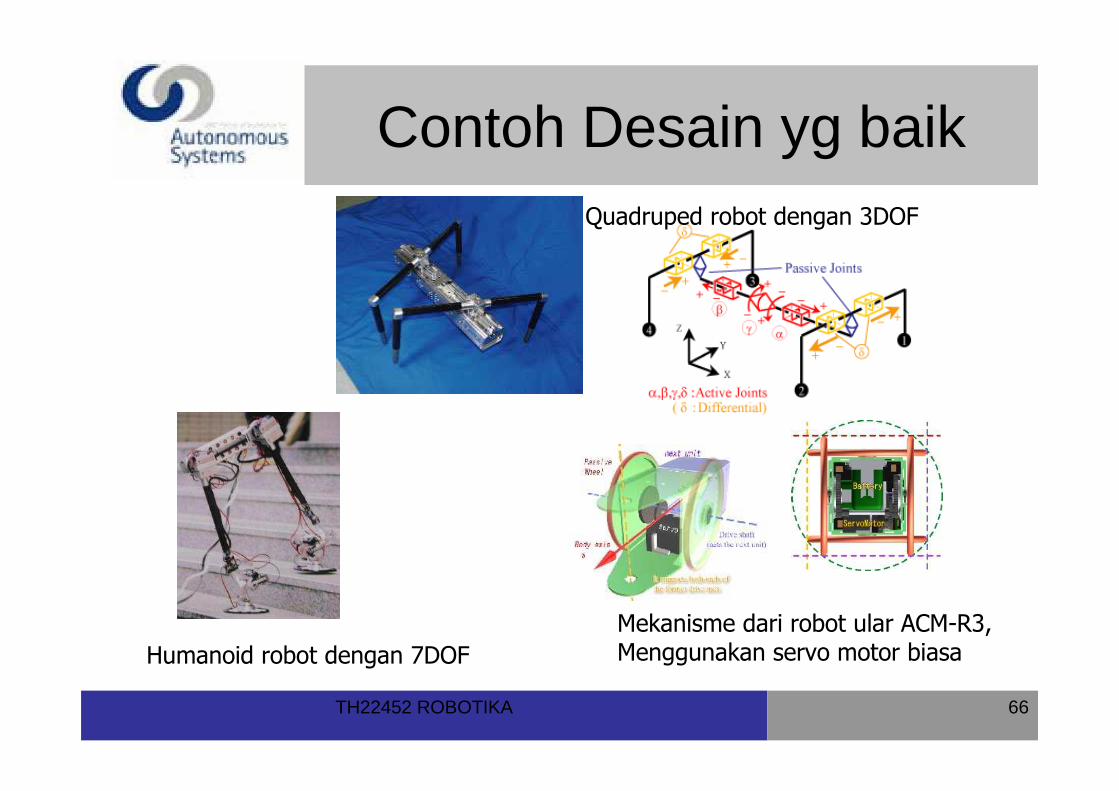
Contoh Desain yg baikQuadruped robot dengan 3DOF
Humanoid robot dengan 7DOF
Mekanisme dari robot ular ACM-R3,
Menggunakan servo motor biasa
TH22452 ROBOTIKA 67
Referensi
• Yoram Koren,”Robotics for Engineers”, McGrawHill International halaman 23-50
• Saeed B Niku, Introduct. To Robotics Analysis, Systems, Appl.”, Prentice Hall halaman 1-27
• R.J. Schilling, Fundamental of Robotics Analysis & Control”, Prentic Hall halaman1-12