tim peneliti - big.go.idbig.go.id/e-ppid/asset/laporan-pelaksanaan-penelitian2018/laporan... ·...
TRANSCRIPT
TIM PENELITI
Danang Budi Susetyo
Aninda Wisaksanti Rudiastuti
Ellen Suryanegara
Fahrul Hidayat
Intan Pujawati
M. Irwan Hariyono
Maslahatun Nashiha
Rizka Windiastuti
Lalitya Narieswari
Bambang Riadi
Fahmi Amhar
i
KATA PENGANTAR
Puji syukur ke hadirat Allah Yang Maha Kuasa, sehingga laporan penelitian
“Penelitian Percepatan Pemetaan Skala Besar” ini dapat diselesaikan. Penelitian
ini merupakan bentuk kontribusi Pusat Penelitian, Promosi dan Kerja Sama untuk
Pusat Pemetaan Dasar Rupabumi dan Toponim Badan Informasi Geospasial dalam
penyediaan data rupabumi skala besar. Dengan mengambil fokus otomasi ekstraksi
fitur bangunan menggunakan data LiDAR, diharapkan percepatan pemetaan
rupabumi dapat menjadi terwujud sebagai bagian dalam penyelesaian peta dasar di
seluruh wilayah Indonesia.
Penelitian ini juga melibatkan masukan-masukan dari berbagai profesi di bidang
geospasial, mulai dari akademisi, praktisi, hingga peneliti-peneliti di luar BIG.
Akademisi dan praktisi dilibatkan dalam Focus Group Discussion (FGD) baik di awal
maupun di akhir penelitian, sedangkan masukan-masukan dari peneliti di luar negeri
didapatkan saat presentasi di Asian Conference on Remote Sensing (ACRS) 2018
di Kuala Lumpur, Malaysia. Masukan-masukan tersebut diharapkan dapat menjadi
perbaikan bagi penelitian ini ke depan.
Terakhir, besar harapan kami, penelitian ini tetap bisa dilanjutkan dalam tahun-
tahun mendatang agar bisa diimplementasikan sebagai bagian dari solusi atas
keterbatasan teknologi dan sumber daya manusia dalam bidang pemetaan
rupabumi. Dengan demikian, Bidang Penelitian akan semakin memiliki kontribusi
yang nyata dalam mendukung tugas dan fungsi Badan Informasi Geospasial.
Pusat Penelitian, Promosi dan Kerja Sama Kepala,
Dr. Wiwin Ambarwulan, M.Sc
ii
DAFTAR ISI
KATA PENGANTAR .................................................................................................. i
DAFTAR ISI ............................................................................................................... ii
DAFTAR GAMBAR .................................................................................................. iii
BAB I. PENDAHULUAN ........................................................................................... 1
1.1. Latar Belakang ........................................................................................ 1
1.2. Persiapan Data ........................................................................................ 2
1.3. Tahapan Pelaksanaan Penelitian ......................................................... 4
1.4. Waktu Pelaksanaan Penelitian ............................................................. 5
1.5. Personil ..................................................................................................... 5
1.6. Luaran (Output) ....................................................................................... 5
1.7. Dampak (Outcome) ................................................................................ 6
BAB II. METODE PENELITIAN ............................................................................. 7
2.1. Filtering ..................................................................................................... 7
2.2. Vektorisasi Bangunan ............................................................................ 9
BAB III. HASIL DAN PEMBAHASAN ................................................................... 11
3.1. Model Bangunan Terekstrak ............................................................... 11
3.2. Evaluasi .................................................................................................. 12
3.2.1. Analisis Visual ........................................................................................ 13
3.2.2. Analisis Statistik .................................................................................... 14
BAB IV. KESIMPULAN DAN SARAN .................................................................. 17
DAFTAR PUSTAKA ................................................................................................ 18
LAMPIRAN 1. KEGIATAN BULANAN ................................................................. 20
LAMPIRAN 2. NOTULENSI RAPAT .................................................................... 28
LAMPIRAN 3. NOTULENSI FGD 1 (MARET 2018) .......................................... 46
LAMPIRAN 4. LAPORAN OVERVIEW TERRASOLID ..................................... 59
LAMPIRAN 5. LAPORAN WORKSHOP PENGOLAHAN LIDAR .................... 61
LAMPIRAN 6. LAPORAN KUNJUNGAN KE PERUSAHAAN PEMETAAN .. 66
LAMPIRAN 7. NOTULENSI FGD 2 (OKTOBER 2018) .................................... 71
LAMPIRAN 8. LETTER OF ACCEPTANCE ACRS 2018 ................................. 73
LAMPIRAN 9. INVITATION LETTER ACRS 2018 ............................................ 75
iii
DAFTAR GAMBAR
Gambar 1. Point cloud tampak atas (kiri) dan miring (kanan) ...................... 3
Gambar 2. Data referensi ............................................................................ 3
Gambar 3. Parameter klasifikasi ground ...................................................... 8
Gambar 4. Parameter klasifikasi vegetasi rendah (kiri), medium (tengah),
dan tinggi (kanan) ...................................................................... 8
Gambar 5. Parameter klasifikasi bangunan ................................................. 9
Gambar 6. Parameter vektorisasi bangunan ............................................... 9
Gambar 7. Model bangunan terekstrak ...................................................... 11
Gambar 8. Overlay antara model bangunan dan point cloud terklasifikasi 12
Gambar 9. Model bangunan terekstrak dari sisi miring .............................. 12
Gambar 10. Overlay antara batas bangunan terkestrak dan orthofoto ........ 14
Gambar 11. Perbandingan antara data terekstrak (merah) dengan data
referensi (hitam) ....................................................................... 16
1
BAB I. PENDAHULUAN
1.1. Latar Belakang
Salah satu layer dalam peta rupabumi Indonesia (RBI) adalah bangunan.
Dalam pemetaan 3 dimensi (3D), fitur-fitur rupabumi dibuat dari stereo plotting,
termasuk bangunan (Susetyo, Syafiudin, & Perdana, 2016). Meskipun terbukti
paling akurat, stereo plotting sangat membutuhkan banyak waktu, sehingga tidak
efektif untuk digunakan dalam pemetaan RBI skala besar di seluruh wilayah
Indonesia. Dengan semakin meningkatnya permintaan dan kebutuhan terhadap
peta RBI skala besar, khususnya untuk keperluan tata ruang, percepatan pemetaan
RBI skala besar menjadi mutlak diperlukan.
Percepatan pemetaan RBI dapat dilakukan dengan dua cara: menambah
jumlah operator atau menggunakan teknologi yang lebih baik. Penelitian ini
mencoba menyelesaikan permasalahan tersebut dengan metode yang kedua, yaitu
menggunakan teknologi alternatif yang lebih baik. Teknologi yang sudah cukup
berkembang yang dapat digunakan untuk percepatan pemetaan RBI skala besar
adalah otomasi ekstraksi fitur rupabumi, misalnya pemutakhiran peta topografi
menggunakan klasifikasi berbasis piksel dan objek (Duncan & Smit, 2012) atau
deteksi perubahan bangunan dari data LiDAR (M. Awrangjeb, Fraser, & Lu, 2015).
Secara lebih spesifik yang terkait dengan otomasi ekstraksi bangunan secara
otomatis, banyak penelitian sudah dikembangkan, seperti menggunakan citra satelit
resolusi sangat tinggi (Belgiu & Drǎguţ, 2014), point cloud LiDAR (Tomljenovic,
Tiede, & Blaschke, 2016), (M Awrangjeb & Fraser, 2013), atau kombinasi LiDAR
dan citra satelit (Sohn & Dowman, 2007), (Mohammad Awrangjeb, Ravanbakhsh, &
Fraser, 2010), (Li et al., 2013), (Mohammad Awrangjeb, Zhang, & Fraser, 2013),
dan (Cheng et al., 2013).
Teknologi LiDAR cukup cepat dan efektif untuk merepresentasikan
permukaan bumi secara 3 dimensi dengan realistis. LiDAR merekam posisi dan
elevasi dari titik target dalam bentuk koordinat x, y, z. Meski demikian, di Indonesia
teknologi LiDAR adalah salah satu teknologi yang potensinya belum cukup
dimanfaatkan sepenuhnya. Penggunaan data LiDAR untuk pemetaan RBI skala
besar masih terbatas pada pembentukan DTM (Digital Terrain Model). Padahal,
data LiDAR dapat digunakan untuk mengekstrak fitur lainnya, salah satunya
bangunan. Otomasi ekstraksi fitur bangunan menggunakan data LiDAR diharapkan
2
dapat mempercepat produksi peta RBI skala besar. Selain itu, ekstraksi fitur
bangunan secara otomatis juga merupakan prasyarat untuk digunakan dalam
pemodelan bangunan, perencanaan tata ruang, pemetaan kebencanaan, serta
pemutakhiran peta digital dan GIS (Khoshelham, Nardinocchi, Frontoni, Mancini, &
Zingaretti, 2010).
Dalam penelitian ini, eksperimen untuk mengekstrak fitur bangunan secara
otomatis dilakukan menggunakan data LiDAR. Tantangan dari penelitian ini adalah
variasi dan kompleksitas dari bangunan-bangunan yang ada di Indonesia. Selain itu,
akurasi horizontal dari bangunan yang dihasilkan dari LiDAR tidak terlalu baik (Li et
al., 2013). Berbagai macam metode telah dikembangkan untuk mengekstrak batas
bangunan dari data LiDAR serta mengatasi kekurangan dari sisi akurasi horizontal.
Penelitian ini menggunakan software Terrasolid untuk mengekstrak bangunan
secara otomatis. Ekstraksi fitur bangunan dari point cloud menggunakan dua
tahapan, yaitu filtering dan segmentasi (Ramiya, Nidamanuri, & Krishnan, 2017).
Filtering bertujuan untuk memisahkan titik ground dan non-ground, sedangkan
segmentasi diaplikasikan pada titik-titik non-ground untuk mendeteksi berbagai
objek yang tercakup dalam data tersebut. Beberapa algoritma segementasi 3D telah
dikembangkan untuk mendeteksi fitur landscape dari point cloud. Segmentasi
berbasis Euclidean clustering adalah salah satu contoh segmentasi yang berbasis
densitas (Rusu, 2009). Untuk deteksi bangunan, dari segmen yang dibuat, perlu
dilakukan pemisahan segmen bangunan dari segmen non-building. Software
komersial pemrosesan data LiDAR seperti Terrasolid menggunakan routine untuk
mendeteksi bangunan secara otomatis dari point cloud. Tujuan dari penelitian ini
adalah untuk mengeksplorasi kemampuan data LiDAR sebagai data masukan
dalam ekstraksi fitur bangunan yang direpresentasikan dalam model 3D
menggunakan software Terrasolid. Data yang digunakan adalah data LiDAR kota
Surabaya dengan kerapatan 12 ppm (points per square meters).
1.2. Persiapan Data
Penelitian ini dilakukan dengan data kota Surabaya, yang merepresentasikan
penggunaan lahan yang bervariasi terutama pemukiman dan industri, khususnya
pada Nomor Lembar Peta (NLP) 1608-4147DT. Point cloud adalah data utama yang
diakuisisi pada tahun 2016 pada program akuisisi foto udara dan LiDAR kota
Surabaya. Point cloud tersebut mempunyai rata-rata kerapatan 12 ppm dengan
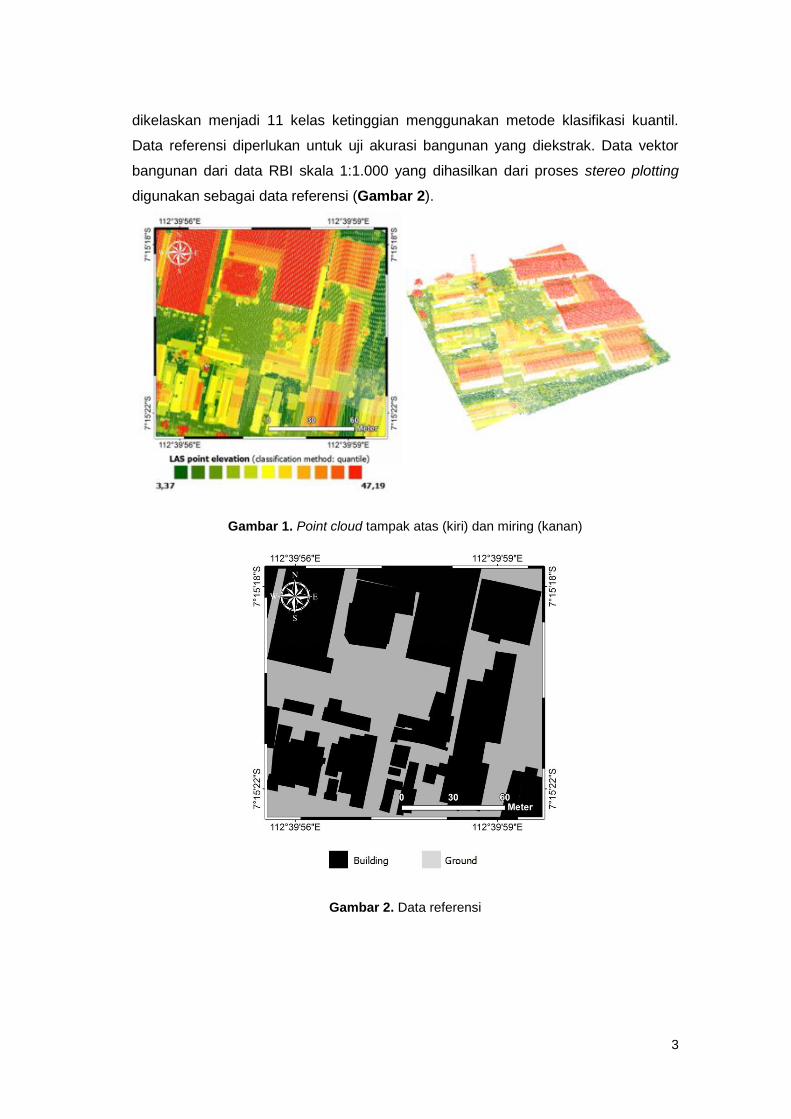
jumlah titik adalah 450.537 titik. Gambar 1 menunjukkan dataset point cloud yang
3
dikelaskan menjadi 11 kelas ketinggian menggunakan metode klasifikasi kuantil.
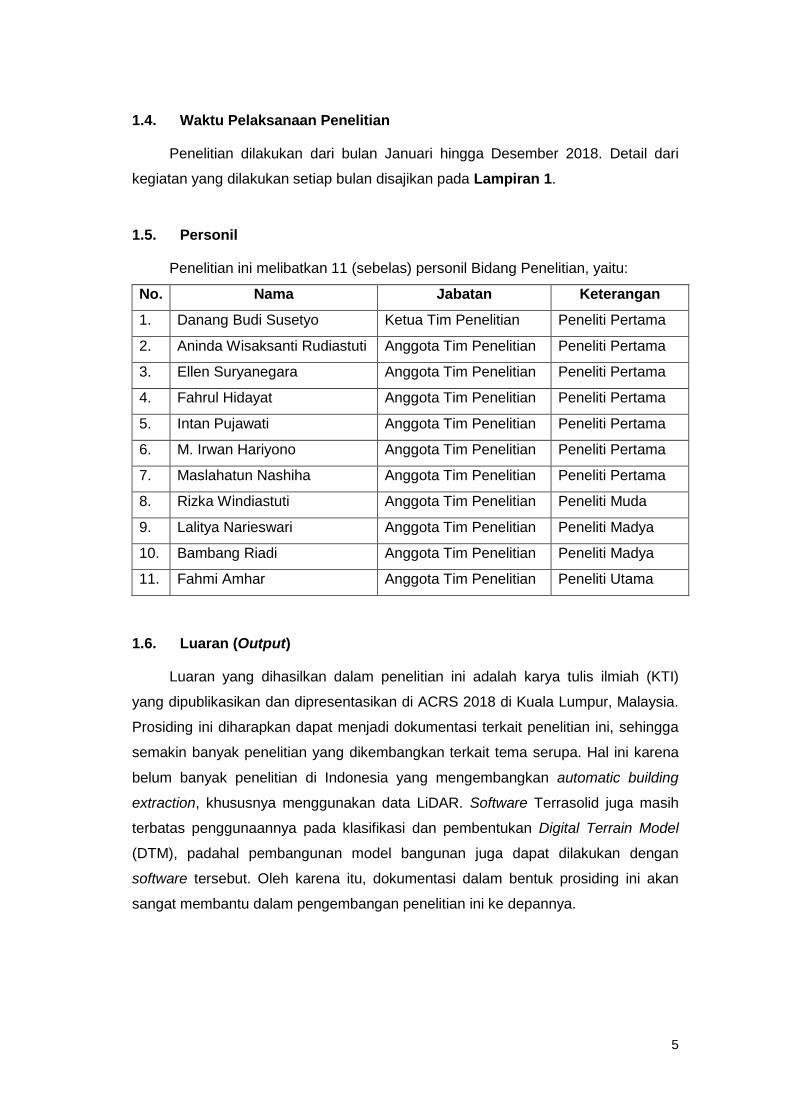
Data referensi diperlukan untuk uji akurasi bangunan yang diekstrak. Data vektor
bangunan dari data RBI skala 1:1.000 yang dihasilkan dari proses stereo plotting
digunakan sebagai data referensi (Gambar 2).
Gambar 1. Point cloud tampak atas (kiri) dan miring (kanan)
Gambar 2. Data referensi

4
1.3. Tahapan Pelaksanaan Penelitian
Penelitian ini dilakukan diawali dengan studi pustaka. Studi pustaka
difokuskan pada jurnal-jurnal internasional agar substansinya lebih mendalam.
Melalui studi pustaka tersebut diharapkan diperoleh referensi yang dapat dijadikan
acuan dalam pelaksanaan penelitian. Untuk memperkaya sumber, diskusi antar
peneliti maupun dengan pihak di luar peneliti dalam bentuk rapat juga dilakukan
setiap bulan, dengan hasil notulensi rapat dapat dilihat pada Lampiran 2.
Setelah dilakukan studi pustaka, hasil dari studi pustaka tersebut dipaparkan
dalam Focus Group Discussion (FGD) yang melibatkan akademisi dari universitas-
universitas di Indonesia, serta para tim teknis yang ada di BIG. Hasil FGD tersebut
menjadi langkah awal dalam menentukan metode penelitian yang benar-benar akan
digunakan, yang hasilnya dapat dilihat pada Lampiran 3.
Untuk meningkatkan kapasitas peneliti dalam melakukan penelitian ini,
dilakukan workshop yang membahas konsep serta teori mengenai pemrosesan data
LiDAR. Para akademisi serta praktisi yang berpengalaman di bidang fotogrametri
dan LiDAR menjadi narasumber dalam workshop tersebut. Workshop tersebut
sangat bermanfaat dalam menambah kapasitas peneliti dan memiliki kontribusi
yang besar dalam hasil penelitian ini. Hasil dari workshop yang sudah dilakukan
dapat dilihat pada Lampiran 4 dan 5.
Selain berupa workshop, dilakukan pula kunjungan ke perusahaan-
perusahaan pemetaan yang berpengalaman di bidang LiDAR untuk menambah
referensi para peneliti terhadap praktek penggunaan data LiDAR yang sudah ada
dan dikaitkan dengan tujuan penelitian yang sedang dilakukan. Hasil dari kunjungan
tersebut disajikan pada Lampiran 6.
Hasil penelitian dipaparkan dalam FGD ke-2 yang dilaksanakan di Institut
Teknologi Sepuluh Nopember (ITS) di Surabaya. Akademisi dari ITS diundang
sebagai narasumber dalam FGD tersebut. ITS dipilih karena data yang digunakan
adalah data LiDAR Surabaya, dan para narasumber yang diundang adalah orang-
orang yang terlibat dalam akuisisi dan pemetaan Surabaya skala 1:1.000. Hasil dari
FGD ke-2 tersebut disajikan dalam Lampiran 7.
Selain dari FGD, hasil penelitian juga dipublikasikan dan dipresentasikan di
Asian Conference on Remote Sensing (ACRS) 2018 yang diselenggarakan di Kuala
Lumpur, Malaysia. Bukti-bukti keterlibatan dalam ACRS 2018 disajikan dalam
Lampiran 8 dan 9.
5
1.4. Waktu Pelaksanaan Penelitian
Penelitian dilakukan dari bulan Januari hingga Desember 2018. Detail dari
kegiatan yang dilakukan setiap bulan disajikan pada Lampiran 1.
1.5. Personil
Penelitian ini melibatkan 11 (sebelas) personil Bidang Penelitian, yaitu:
No. Nama Jabatan Keterangan
1. Danang Budi Susetyo Ketua Tim Penelitian Peneliti Pertama
2. Aninda Wisaksanti Rudiastuti Anggota Tim Penelitian Peneliti Pertama
3. Ellen Suryanegara Anggota Tim Penelitian Peneliti Pertama
4. Fahrul Hidayat Anggota Tim Penelitian Peneliti Pertama
5. Intan Pujawati Anggota Tim Penelitian Peneliti Pertama
6. M. Irwan Hariyono Anggota Tim Penelitian Peneliti Pertama
7. Maslahatun Nashiha Anggota Tim Penelitian Peneliti Pertama
8. Rizka Windiastuti Anggota Tim Penelitian Peneliti Muda
9. Lalitya Narieswari Anggota Tim Penelitian Peneliti Madya
10. Bambang Riadi Anggota Tim Penelitian Peneliti Madya
11. Fahmi Amhar Anggota Tim Penelitian Peneliti Utama
1.6. Luaran (Output)
Luaran yang dihasilkan dalam penelitian ini adalah karya tulis ilmiah (KTI)
yang dipublikasikan dan dipresentasikan di ACRS 2018 di Kuala Lumpur, Malaysia.
Prosiding ini diharapkan dapat menjadi dokumentasi terkait penelitian ini, sehingga
semakin banyak penelitian yang dikembangkan terkait tema serupa. Hal ini karena
belum banyak penelitian di Indonesia yang mengembangkan automatic building
extraction, khususnya menggunakan data LiDAR. Software Terrasolid juga masih
terbatas penggunaannya pada klasifikasi dan pembentukan Digital Terrain Model
(DTM), padahal pembangunan model bangunan juga dapat dilakukan dengan
software tersebut. Oleh karena itu, dokumentasi dalam bentuk prosiding ini akan
sangat membantu dalam pengembangan penelitian ini ke depannya.

6
1.7. Dampak (Outcome)
Dampak yang dihasilkan dari penelitian ini adalah adanya dasar bahwa
otomasi ekstraksi fitur rupabumi, khususnya bangunan, dapat dilakukan dengan
data yang sudah ada. Selain itu, dari penelitian ini juga dapat diketahui bahwa
software Terrasolid dapat digunakan untuk keperluan tersebut. Jika penelitian ini
dikembangkan lebih lanjut pada tahun-tahun mendatang dan hasilnya dapat
diimplementasikan, otomasi ekstraksi akan mempercepat produksi peta RBI,
khususnya pada skala besar. Hal tersebut merupakan tujuan dari penelitian ini,
sehingga pada akhirnya memiliki kontribusi yang nyata dalam menyelesaikan
pemetaan RBI skala besar di seluruh wilayah Indonesia.
7
BAB II. METODE PENELITIAN
2.1. Filtering
Filtering adalah proses yang diperlukan untuk mengklasifikasikan point cloud
berdasarkan parameter dan algoritma tertentu. Point cloud harus diklasifikasikan
menjadi ground dan non-ground sebelum didapatkan kelas bangunan. Klasifikasi
ground dan non-ground dapat mengurangi jumlah titik dan membantu
mengidentifikasi bangunan (Ramiya et al., 2017). Penelitian ini menggunakan
algoritma default dari TerraScan (salah satu modul pada software Terrasolid) untuk
mengklasifikasikan ground dan non-ground dan juga untuk melakukan vektorisasi
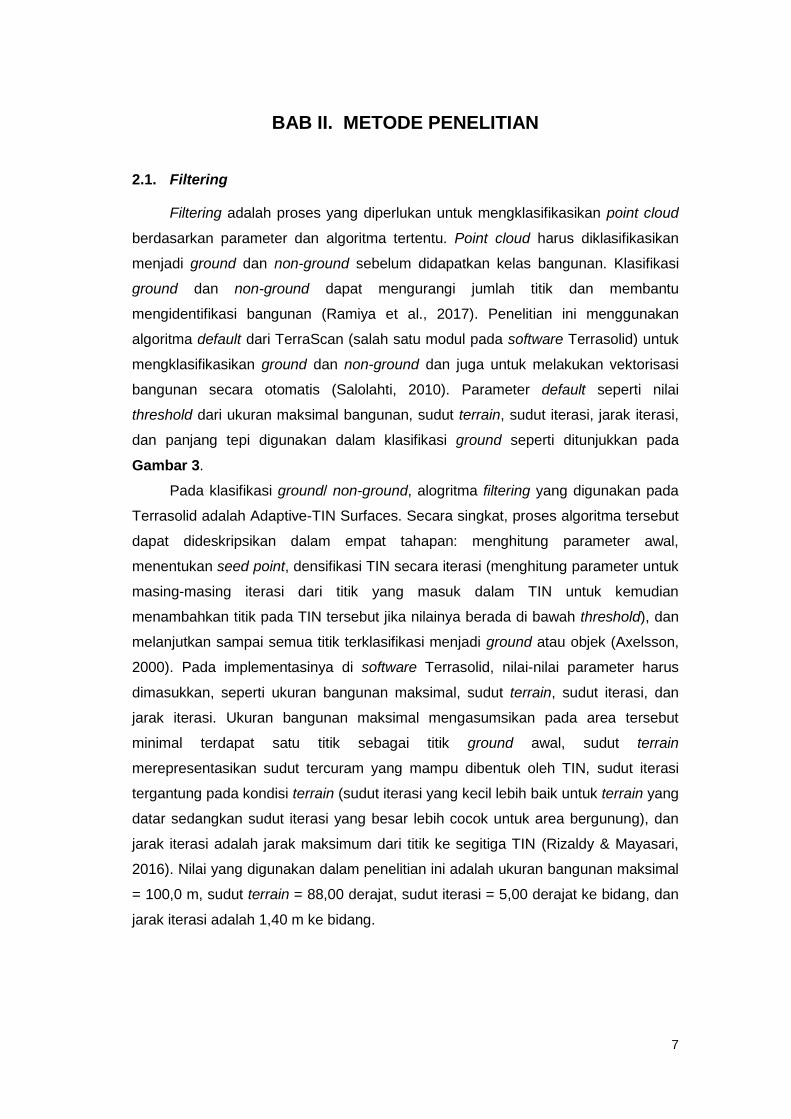
bangunan secara otomatis (Salolahti, 2010). Parameter default seperti nilai
threshold dari ukuran maksimal bangunan, sudut terrain, sudut iterasi, jarak iterasi,
dan panjang tepi digunakan dalam klasifikasi ground seperti ditunjukkan pada
Gambar 3.
Pada klasifikasi ground/ non-ground, alogritma filtering yang digunakan pada
Terrasolid adalah Adaptive-TIN Surfaces. Secara singkat, proses algoritma tersebut
dapat dideskripsikan dalam empat tahapan: menghitung parameter awal,
menentukan seed point, densifikasi TIN secara iterasi (menghitung parameter untuk
masing-masing iterasi dari titik yang masuk dalam TIN untuk kemudian
menambahkan titik pada TIN tersebut jika nilainya berada di bawah threshold), dan
melanjutkan sampai semua titik terklasifikasi menjadi ground atau objek (Axelsson,
2000). Pada implementasinya di software Terrasolid, nilai-nilai parameter harus
dimasukkan, seperti ukuran bangunan maksimal, sudut terrain, sudut iterasi, dan
jarak iterasi. Ukuran bangunan maksimal mengasumsikan pada area tersebut
minimal terdapat satu titik sebagai titik ground awal, sudut terrain
merepresentasikan sudut tercuram yang mampu dibentuk oleh TIN, sudut iterasi
tergantung pada kondisi terrain (sudut iterasi yang kecil lebih baik untuk terrain yang
datar sedangkan sudut iterasi yang besar lebih cocok untuk area bergunung), dan
jarak iterasi adalah jarak maksimum dari titik ke segitiga TIN (Rizaldy & Mayasari,
2016). Nilai yang digunakan dalam penelitian ini adalah ukuran bangunan maksimal
= 100,0 m, sudut terrain = 88,00 derajat, sudut iterasi = 5,00 derajat ke bidang, dan
jarak iterasi adalah 1,40 m ke bidang.
8
Gambar 3. Parameter klasifikasi ground
Kemudian titik-titik non-ground dikasifikasikan menjadi vegetasi rendah,
vegetasi medium, dan vegetasi tinggi berdasarkan perbedaan nilai ketinggian antara
keseluruhan titik dan titik-titik ground. Untuk mendeteksi titik-titik bangunan dari titik-
titik non-ground, algoritma mengidentifikasi lubang pada titik-titik ground, kemudian
titik-titik non-ground pada lokasi di lubang tersebut melakukan pengecekan terhadap
kondisi planarity, dan jika memenuhi maka titik-titik tersebut diklasifikasikan menjadi
bangunan (Ramiya et al., 2017). Parameter yang digunakan adalah ukuran
bangunan minimum dan toleransi Z.
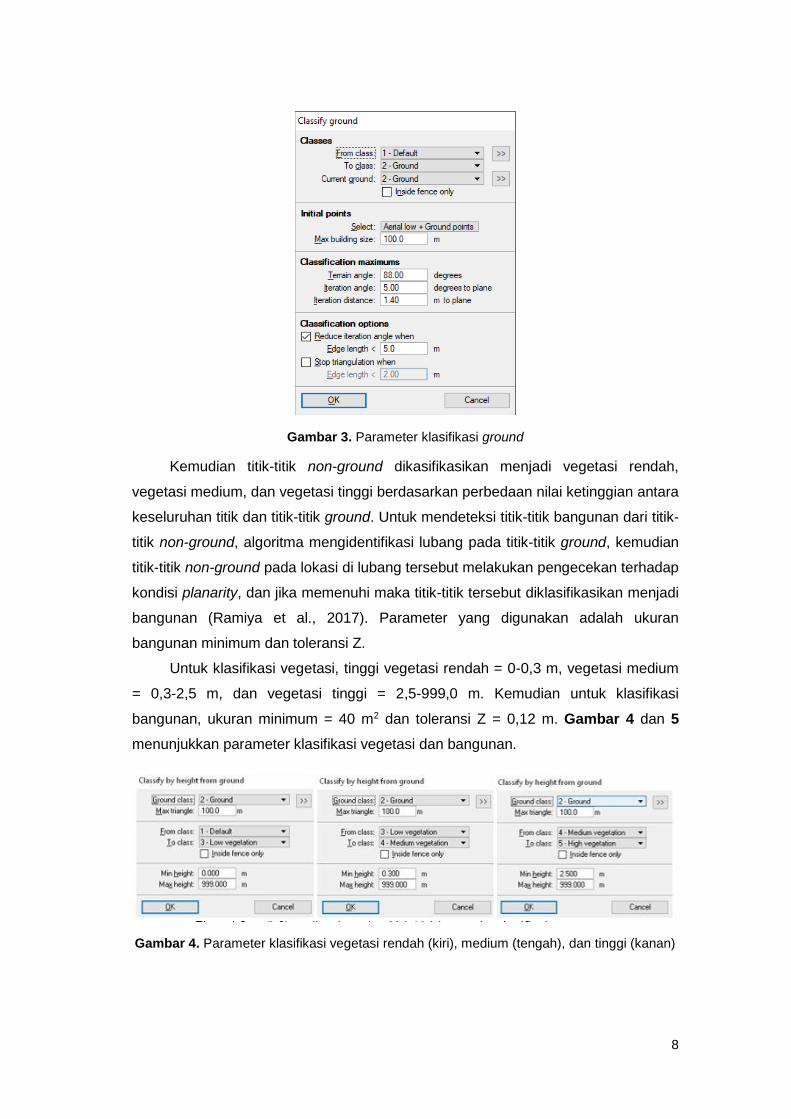
Untuk klasifikasi vegetasi, tinggi vegetasi rendah = 0-0,3 m, vegetasi medium
= 0,3-2,5 m, dan vegetasi tinggi = 2,5-999,0 m. Kemudian untuk klasifikasi
bangunan, ukuran minimum = 40 m2 dan toleransi Z = 0,12 m. Gambar 4 dan 5
menunjukkan parameter klasifikasi vegetasi dan bangunan.
Gambar 4. Parameter klasifikasi vegetasi rendah (kiri), medium (tengah), dan tinggi (kanan)

9
Gambar 5. Parameter klasifikasi bangunan
2.2. Vektorisasi Bangunan
Algoritma untuk mendeteksi bangunan di software Terrasolid adalah dengan
menyesuaikan dan menempatkan bidang ke sekumpulan titik yang awalnya
diidentifikasi berdasarkan lubang pada titik-titik ground (Ramiya et al., 2017). Tools
yang digunakan untuk membuat model bangunan di Terrasolid adalah Vectorize
Building. Untuk memvektorisasi bangunan berdasarkan point cloud LiDAR,
beberapa parameter harus didefinisikan, seperti ditunjukkan pada Gambar 6.
Gambar 6. Parameter vektorisasi bangunan
Pada Panduan TerraScan untuk Pengguna/ TerraScan User’s Guide
(Soininen, 2015), masing-masing parameter dapat dijelaskan sebagai berikut:
Gap maksimum : Jarak maksimal antara bagian bangunan yang
dimiliki oleh model yang sama. Semakin besar
10
jaraknya, model bangunan yang terpisah akan
semakin mudah untuk terbentuk
Toleransi planarity : Mendefinisikan seberapa dekat titik harus sesuai
(match) dengan bidang dari sebuah atap yang
terbentuk
Peningkatan toleransi : Toleransi tambahan untuk menggabungkan bidang
horizontal yang berdekatan
Area minimum : Ukuran minimum dari footprint bangunan
Detail minimum : Ukuran minimum dari footprint bagian dari
bangunan
Kemiringan atap maksimal : Gradien maksimal dari bidang atap
11
BAB III. HASIL DAN PEMBAHASAN
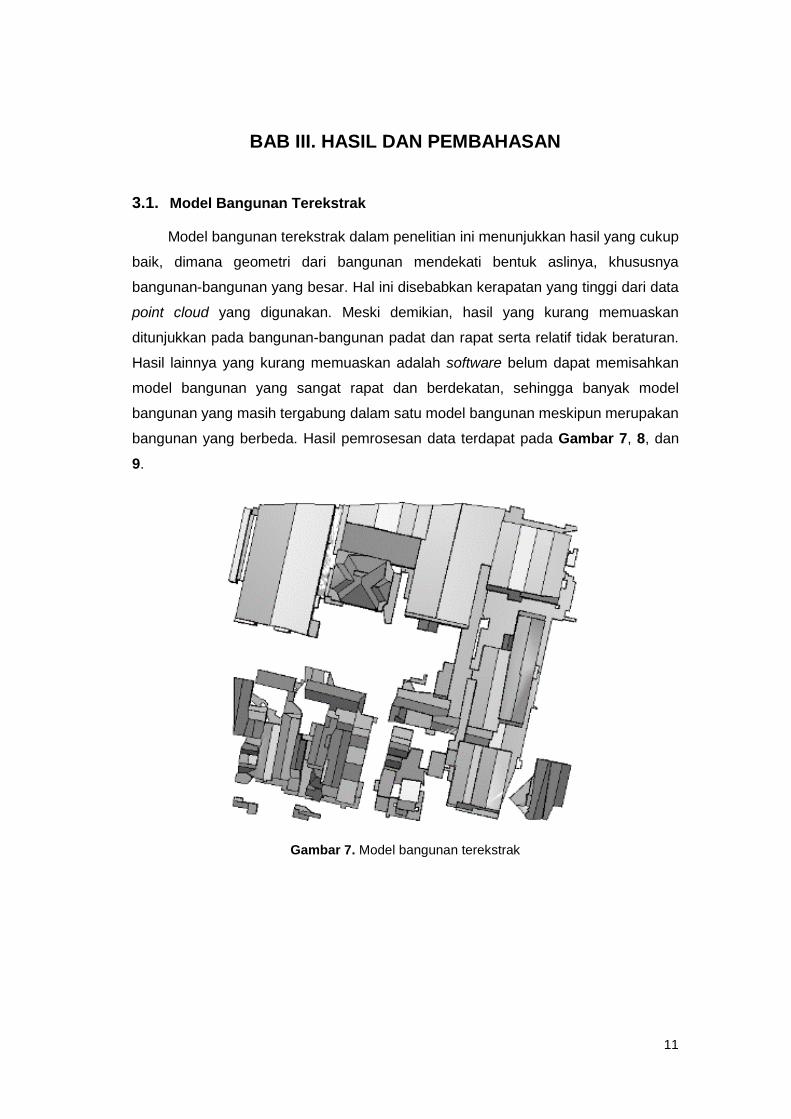
3.1. Model Bangunan Terekstrak
Model bangunan terekstrak dalam penelitian ini menunjukkan hasil yang cukup
baik, dimana geometri dari bangunan mendekati bentuk aslinya, khususnya
bangunan-bangunan yang besar. Hal ini disebabkan kerapatan yang tinggi dari data
point cloud yang digunakan. Meski demikian, hasil yang kurang memuaskan
ditunjukkan pada bangunan-bangunan padat dan rapat serta relatif tidak beraturan.
Hasil lainnya yang kurang memuaskan adalah software belum dapat memisahkan
model bangunan yang sangat rapat dan berdekatan, sehingga banyak model
bangunan yang masih tergabung dalam satu model bangunan meskipun merupakan
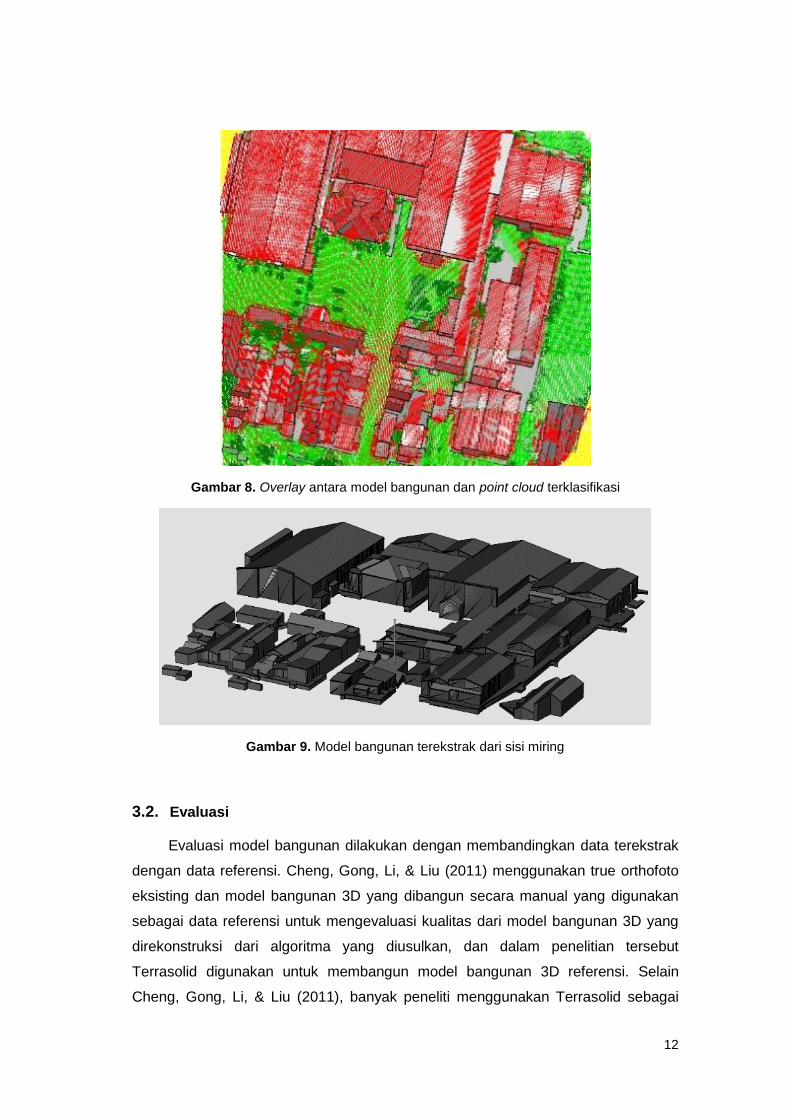
bangunan yang berbeda. Hasil pemrosesan data terdapat pada Gambar 7, 8, dan
9.
Gambar 7. Model bangunan terekstrak
12
Gambar 8. Overlay antara model bangunan dan point cloud terklasifikasi
Gambar 9. Model bangunan terekstrak dari sisi miring
3.2. Evaluasi
Evaluasi model bangunan dilakukan dengan membandingkan data terekstrak
dengan data referensi. Cheng, Gong, Li, & Liu (2011) menggunakan true orthofoto
eksisting dan model bangunan 3D yang dibangun secara manual yang digunakan
sebagai data referensi untuk mengevaluasi kualitas dari model bangunan 3D yang
direkonstruksi dari algoritma yang diusulkan, dan dalam penelitian tersebut
Terrasolid digunakan untuk membangun model bangunan 3D referensi. Selain
Cheng, Gong, Li, & Liu (2011), banyak peneliti menggunakan Terrasolid sebagai
13
referensi untuk dibandingkan dengan algoritma yang mereka buat. Salah satunya
adalah Sulaiman, Majid, & Setan (2010), yang menggunakan TerraScan untuk
mengevaluasi DTM yang di-generate dari software open source LiDAR, yaitu
Airborne LiDAR Data Processing and Analysis Tools (ALDPAT) dan Ramiya et al.,
(2017) yang menggunakan Terrasolid untuk mengevaluasi software open source
point cloud library (PCL) untuk segmentasi 3D dari point cloud LiDAR.
Karena dalam penelitian ini tidak ada model bangunan lain yang dapat
digunakan sebagai referensi, pada akhirnya dipilih orthofoto dan peta RBI skala
1:1.000 sebagai data referensi. Orthofoto digunakan dalam analisis visual,
sedangkan peta RBI digunakan dalam analisis statistik. Evaluasi ini dapat
merepresentasikan akurasi dari model bangunan yang diekstrak dari data LiDAR
menggunakan software Terrasolid.
3.2.1. Analisis Visual
Pada analisis visual, model bangunan terekstrak dibandingkan dengan
orthofoto. Cheng et al. (2011) meng-overlay batas bangunan dan true orthofoto
untuk menguji akurasi geometri. Karena dalam penelitian ini hanya ada ground
orthofoto, pengecekan akurasi geometri model bangunan terekstrak tidak dapat
dilakukan karena atap bangunan dalam orthofoto tersebut miring. Meski demikian,
ground orthofoto paling tidak dapat digunakan untuk mengecek model bangunan
terhadap visualisasi kenyataan dari objek yang dimodelkan.
Untuk mengekstrak batas bangunan, digunakan tools Draw Roof Lines untuk
mengekstrak batas terluar dari masing-masing bangunan. Meski demikian, karena
ada banyak model bangunan yang tergabung menjadi satu model bangunan, harus
dilakukan pemisahan setiap bangunan secara manual menggunakan tools Split
Building. Setelah proses tersebut, didapatkan batas terluar dari masing-masing
bangunan.
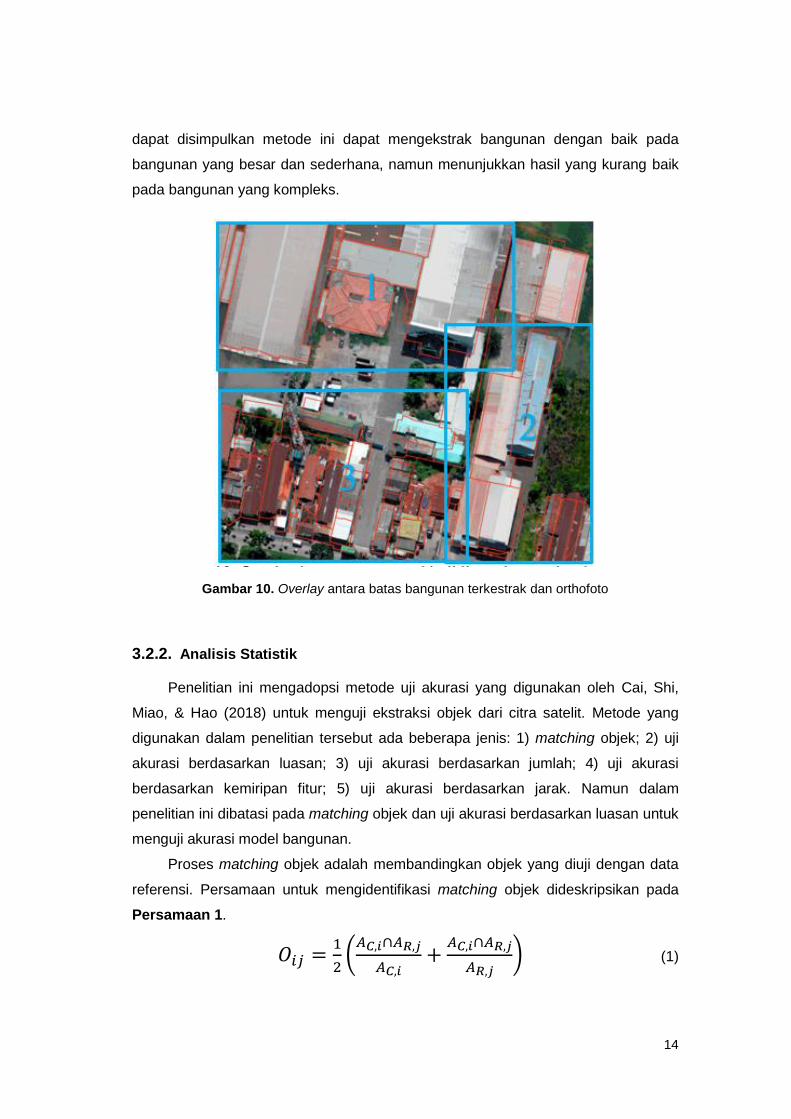
Seperti ditunjukkan pada Gambar 10, bangunan-bangunan besar (grup 1)
menunjukkan hasil yang lebih baik dibandingkan bangunan-bangunan yang kecil
dan rapat (grup 3). Geometri dan struktur yang lebih sederhana kemungkinan
merupakan faktor penting yang membuat model bangunan pada grup 1 lebih baik
dibandingkan dengan yang lain. Sementara, bangunan berukuran sedang (grup 2)
menunjukkan hasil yang lebih baik dari grup 3, namun masih ada beberapa bagian
yang tidak cocok jika dibandingkan dengan orthofoto. Berdasarkan visualisasi ini,
14
dapat disimpulkan metode ini dapat mengekstrak bangunan dengan baik pada
bangunan yang besar dan sederhana, namun menunjukkan hasil yang kurang baik
pada bangunan yang kompleks.
Gambar 10. Overlay antara batas bangunan terkestrak dan orthofoto
3.2.2. Analisis Statistik
Penelitian ini mengadopsi metode uji akurasi yang digunakan oleh Cai, Shi,
Miao, & Hao (2018) untuk menguji ekstraksi objek dari citra satelit. Metode yang
digunakan dalam penelitian tersebut ada beberapa jenis: 1) matching objek; 2) uji
akurasi berdasarkan luasan; 3) uji akurasi berdasarkan jumlah; 4) uji akurasi
berdasarkan kemiripan fitur; 5) uji akurasi berdasarkan jarak. Namun dalam
penelitian ini dibatasi pada matching objek dan uji akurasi berdasarkan luasan untuk
menguji akurasi model bangunan.
Proses matching objek adalah membandingkan objek yang diuji dengan data
referensi. Persamaan untuk mengidentifikasi matching objek dideskripsikan pada
Persamaan 1.
𝑂𝑖𝑗 =1
2(
𝐴𝐶,𝑖∩𝐴𝑅,𝑗
𝐴𝐶,𝑖+
𝐴𝐶,𝑖∩𝐴𝑅,𝑗
𝐴𝑅,𝑗) (1)

15
dimana 𝐴𝑅,𝑗 adalah luas area dari data referensi, 𝐴𝐶,𝑖 adalah luas area dari data yang
diuji, dan 𝐴𝐶,𝑖 ∩ 𝐴𝑅,𝑗 area intersect dari kedua data tersebut.
Metode uji akurasi kedua adalah berdasarkan luasan area. Cai et al. (2018)
menyebutkan keuntungan dari uji akurasi berdasarkan luasan dibandingkan
menggunakan confusion matrix. Hasil uji akurasi pada dua studi kasus yaitu area
besar dan kecil adalah sama jika menggunakan uji akurasi berdasarkan luasan.
Parameter uji akurasi berdasarkan luasan adalah kebenaran (correctness),
kelengkapan (completeness), dan kualitas (quality) (Cai et al., 2018). Parameter
tersebut cukup umum digunakan seperti oleh He, Zhang, & Xin (2018) yang
melakukan uji akurasi dari identifikasi pola grup bangunan menggunakan parameter
kebenaran dan kelengkapan.
Persamaan untuk menghitung nilai parameter kebenaran, kelengkapan, dan
kualitas dapat dilihat pada Persamaan 2 dan 3.
𝑃𝐴𝐶 =𝐴𝐶
𝐴𝐷𝐶 (2)
𝑃𝐴𝑅 =𝐴𝐶
𝐴𝑅𝐶 (3)
dimana kebenaran 𝑃𝐴𝐶 adalah rasio kebenaran dari objek terekstrak dengan benar
terhadap keseluruhan objek yang terekstrak, 𝐴𝐷𝐶 adalah keseluruhan area yang
terekstrak, dan 𝐴𝐶 bagian yang benar dari 𝐴𝐷𝐶. Rentang nilai kebenaran adalah dari
0 sampai 1. Jika semua objek terekstrak dengan benar matching seluruhnya dengan
keseluruhan area yang terekstrak maka 𝑃𝐴𝐶 = 1. Kemudian kelengkapan 𝑃𝐴𝑅 adalah
rasio dari area yang terekstrak dengan benar 𝐴𝐶 terhadap area referensi 𝐴𝑅𝐶.
Rentang kelengkapan adalah dari 0 sampai 1. Jika seluruh objek yang diuji matching
seluruhnya dengan data referensi, maka 𝑃𝐴𝑅 = 1.
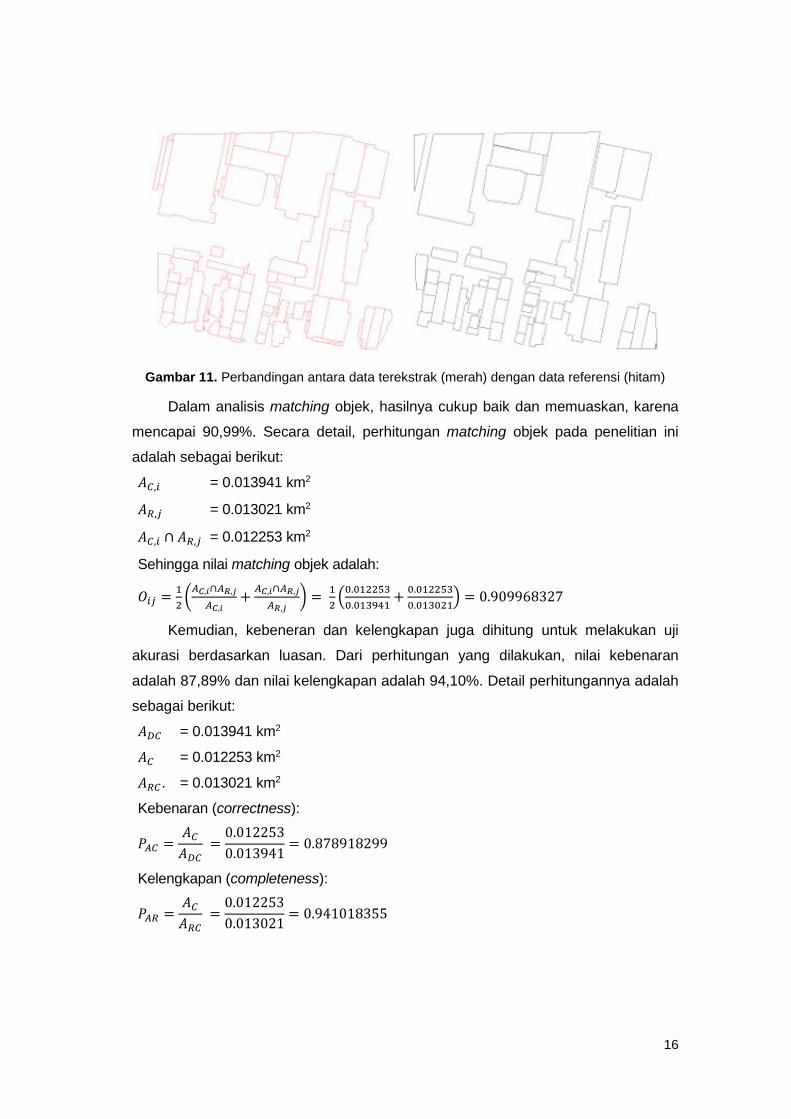
Data referensi yang digunakan dalam analisis statistik adalah peta RBI skala
1:1.000. Gambar 11 menunjukkan perbandingan antara data terekstrak dengan
data referensi.
16
Gambar 11. Perbandingan antara data terekstrak (merah) dengan data referensi (hitam)
Dalam analisis matching objek, hasilnya cukup baik dan memuaskan, karena
mencapai 90,99%. Secara detail, perhitungan matching objek pada penelitian ini
adalah sebagai berikut:
𝐴𝐶,𝑖 = 0.013941 km2
𝐴𝑅,𝑗 = 0.013021 km2
𝐴𝐶,𝑖 ∩ 𝐴𝑅,𝑗 = 0.012253 km2
Sehingga nilai matching objek adalah:
𝑂𝑖𝑗 =1
2(
𝐴𝐶,𝑖∩𝐴𝑅,𝑗
𝐴𝐶,𝑖+
𝐴𝐶,𝑖∩𝐴𝑅,𝑗
𝐴𝑅,𝑗) =
1
2(
0.012253
0.013941+
0.012253
0.013021) = 0.909968327
Kemudian, kebeneran dan kelengkapan juga dihitung untuk melakukan uji
akurasi berdasarkan luasan. Dari perhitungan yang dilakukan, nilai kebenaran
adalah 87,89% dan nilai kelengkapan adalah 94,10%. Detail perhitungannya adalah
sebagai berikut:
𝐴𝐷𝐶 = 0.013941 km2
𝐴𝐶 = 0.012253 km2
𝐴𝑅𝐶. = 0.013021 km2
Kebenaran (correctness):
𝑃𝐴𝐶 =𝐴𝐶
𝐴𝐷𝐶 =
0.012253
0.013941= 0.878918299
Kelengkapan (completeness):
𝑃𝐴𝑅 =𝐴𝐶
𝐴𝑅𝐶 =
0.012253
0.013021= 0.941018355
17
BAB IV. KESIMPULAN DAN SARAN
Teknologi LiDAR adalah salah satu teknologi yang belum dimanfaatkan
sepenuhnya dalam pemetaan RBI. Penggunaan data LiDAR dalam pemetaan RBI
baru terbatas pada pembentukan DTM (Digital Terrain Model). Padahal, data LiDAR
juga dapat digunakan untuk mengekstrak fitur-fitur lainnya, salah satunya
bangunan. Otomasi ekstraksi fitur bangunan menggunakan data LiDAR diharapkan
dapat mempercepat produksi peta RBI skala besar. Oleh karena itu, penelitian ini
dilakukan dengan fokus otomasi ekstraksi fitur bangunan menggunakan data
LiDAR.
Penelitian ini menggunakan algoritma default dari TerraScan (salah satu
modul dalam software Terrasolid) untuk mengklasifikasi ground dan non-ground
untuk kemudian dilakukan vektorisasi bangunan secara otomatis. Kemudian titik-titik
non-ground diklasifikasikan menjadi vegetasi rendah, medium, dan tinggi
berdasarkan perbedaan ketinggian antara keseluruhan titik dengan titik-titik ground.
Terakhir, model bangunan dibuat menggunakan tools Vectorize Building.
Pada analisis visual, bangunan besar menunjukkan hasil yang lebih baik
dibandingkan bangunan yang kecil dan rapat. Berdasarkan visualisasi ini, dapat
disimpulkan metode ini dapat menghasilkan ekstraksi yang baik pada bangunan
yang besar dan sederhana, namun menunjukkan hasil yang kurang memuaskan
pada bangunan yang kompleks dan rapat. Pada analisis statistik, analisis dibagi
menjadi analisis matching objek dan uji akurasi berdasarkan luasan. Pada analisis
matching objek, hasilnya cukup baik karena mencapai 90,99%, sedangkan dari uji
akurasi berdasarkan luasan, hasilnya adalah kebenaran (correctness) 87,89% dan
kelengkapan (completeness) 94,10%.
18
DAFTAR PUSTAKA
Awrangjeb, M., & Fraser, C. (2013). Rule-based Segmentation of LiDAR Point Cloud for Automatic Extraction of Building Roof Planes. ISPRS Annals of Photogrammetry, Remote Sensing and Spatial Information Sciences, II-3(November), 1–6. https://doi.org/10.5194/isprsannals-II-3-W3-1-2013
Awrangjeb, M., Fraser, C. S., & Lu, G. (2015). Building Change Detection From Lidar Point Cloud Data Based on Connected Component Analysis. ISPRS Annals of Photogrammetry, Remote Sensing and Spatial Information Sciences, II-3/W5, 393–400. https://doi.org/10.5194/isprsannals-II-3-W5-393-2015
Awrangjeb, M., Ravanbakhsh, M., & Fraser, C. S. (2010). Automatic Detection of Residential Buildings using LIDAR Data and Multispectral Imagery. ISPRS Journal of Photogrammetry and Remote Sensing, 65(5), 457–467. https://doi.org/10.1016/j.isprsjprs.2010.06.001
Awrangjeb, M., Zhang, C., & Fraser, C. S. (2013). Automatic Extraction of Building Roofs using LIDAR Data and Multispectral Imagery. ISPRS Journal of Photogrammetry and Remote Sensing, 83, 1–18. https://doi.org/10.1016/j.isprsjprs.2013.05.006
Axelsson, P. (2000). DEM Generation from Laser Scanner Data Using Adaptive TIN Models. International Archives of Photogrammetry and Remote Sensing, 23(B4), 110–117. https://doi.org/10.1016/j.isprsjprs.2005.10.005
Belgiu, M., & Drǎguţ, L. (2014). Comparing Supervised and Unsupervised Multiresolution Segmentation Approaches for Extracting Buildings from Very High Resolution Imagery. ISPRS Journal of Photogrammetry and Remote Sensing, 96, 67–75. https://doi.org/10.1016/j.isprsjprs.2014.07.002
Cai, L., Shi, W., Miao, Z., & Hao, M. (2018). Accuracy Assessment Measures for Object Extraction from Remote Sensing Images. Remote Sensing, 10(303). https://doi.org/10.3390/rs10020303
Cheng, L., Gong, J., Li, M., & Liu, Y. (2011). 3D Building Model Reconstruction from Multi-view Aerial Imagery and Lidar Data. Photogrammetric Engineering & Remote Sensing, 77(2), 125–139. https://doi.org/10.14358/PERS.77.2.125
Cheng, L., Tong, L., Chen, Y., Zhang, W., Shan, J., Liu, Y., & Li, M. (2013). Integration of LiDAR Data and Optical Multi-view Images for 3D Reconstruction of Building Roofs. Optics and Lasers in Engineering, 51(4), 493–502. https://doi.org/10.1016/j.optlaseng.2012.10.010
Duncan, P., & Smit, J. (2012). An Investigation of Automatic Change Detection for Topographic Map Updating. ISPRS - International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXXIX-B7(September), 311–316. https://doi.org/10.5194/isprsarchives-XXXIX-B7-311-2012
He, X., Zhang, X., & Xin, Q. (2018). Recognition of Building Group Patterns in Topographic Maps Based on Graph Partitioning and Random Forest. ISPRS
19
Journal of Photogrammetry and Remote Sensing, 136, 26–40. https://doi.org/10.1016/j.isprsjprs.2017.12.001
Khoshelham, K., Nardinocchi, C., Frontoni, E., Mancini, A., & Zingaretti, P. (2010). Performance Evaluation of Automated Approaches to Building Detection in Multi-source Aerial Data. ISPRS Journal of Photogrammetry and Remote Sensing, 65(1), 123–133. https://doi.org/10.1016/j.isprsjprs.2009.09.005
Li, Y., Wu, H., An, R., Xu, H., He, Q., & Xu, J. (2013). An Improved Building Boundary Extraction Algorithm Based on Fusion of Optical Imagery and LIDAR Data. Optik, 124(22), 5357–5362. https://doi.org/10.1016/j.ijleo.2013.03.045
Ramiya, A. M., Nidamanuri, R. R., & Krishnan, R. (2017). Segmentation Based Building Detection Approach from LiDAR Point Cloud. Egyptian Journal of Remote Sensing and Space Science, 20(1), 71–77. https://doi.org/10.1016/j.ejrs.2016.04.001
Rizaldy, A., & Mayasari, R. (2016). Acceleration of Topographic Map Production Using Semi-Automatic Dtm From Dsm Radar Data. ISPRS - International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XLI-B7(July), 47–54. https://doi.org/10.5194/isprsarchives-XLI-B7-47-2016
Rusu, R. B. (2009). Semantic 3D Object Maps for Everyday Manipulation in Human Living Environments. Technische Universität München. Technische Universität München. https://doi.org/10.1007/s13218-010-0059-6
Salolahti, M. (2010). Advanced Use of Lidar Data - Automatic Building Vectorization and Contour Production. The XXIV FIG International Congress 2010 “Facing the Challenges - Building the Capacity,” (April 2010), 11–16.
Sohn, G., & Dowman, I. (2007). Data Fusion of High-resolution Satellite Imagery and LiDAR Data for Automatic Building Extraction. ISPRS Journal of Photogrammetry and Remote Sensing, 62(1), 43–63. https://doi.org/10.1016/j.isprsjprs.2007.01.001
Soininen, A. (2015). TerraScan User’s Guide. Retrieved from http://www.terrasolid.com/download/tscan.pdf
Sulaiman, N. S., Majid, Z., & Setan, H. (2010). DTM Generation from LiDAR Data by Using Different Filters in Open-Source Software. Geoinformation Science, 10(2), 89–109. https://doi.org/10.1111/j.1467-9671.2008.01088.x
Susetyo, D. B., Syafiudin, M. F., & Perdana, A. P. (2016). Stereokompilasi Unsur Rupabumi Skala 1:25.000 Menggunakan Data TerraSAR-X dan Citra SPOT-6. In Seminar Nasional Penginderaan Jauh (pp. 1–8). Depok: Lembaga Penerbangan dan Antariksa Nasional.
Tomljenovic, I., Tiede, D., & Blaschke, T. (2016). A Building Extraction Approach for Airborne Laser Scanner Data Utilizing the Object Based Image Analysis Paradigm. International Journal of Applied Earth Observation and Geoinformation, 52, 137–148. https://doi.org/10.1016/j.jag.2016.06.007
20
LAMPIRAN 1. KEGIATAN BULANAN
LOKASI, WAKTU
KETERANGAN FOTO
Januari
Ruang Rapat Bidang Penelitian, Gd. S Lt.1/ 29 Januari 2018
Kick-off meeting kegiatan penelitian Percepatan Pemetaan Skala Besar
Februari
Ruang Rapat Bidang Penelitian, Gd. S Lt.1/ 9 Februari 2018
Membahas metode yang akan digunakan, dan dibagi per kelompok untuk mempelajari detail setiap metode tersebut
Ruang Rapat Bidang Penelitian, Gd. S Lt.1/ 20 Februari 2018
Setiap kelompok memaparkan progresnya
Maret
The Sahira Hotel/ 9 Maret 2018
FGD untuk membahas metode penelitian yang akan digunakan
21
LOKASI, WAKTU
KETERANGAN FOTO
Ruang Rapat Bidang Penelitian, Gd. S Lt.1/ 15 Maret 2018
Membahas follow up hasil FGD serta rencana pelatihan Terrasolid
Waindo dan PT Geonet Infomedia/ 23 & 29 Maret 2018
Membahas rencana pelatihan Terrasolid dengan pihak trainer
April
PT Waindo SpecTerra/ 17-18 April 2018
Overview penggunaan Terrasolid secara umum, dengan target utama adalah hingga klasifikasi bangunan
The Sahira Hotel/ 30 April-4 Mei 2018
Workshop pengolahan data LiDAR secara umum dari teori hingga praktek. Teori disampaikan oleh akademisi (Dr. Harintaka dari UGM dan Dr. Budhy Suksmantono dari ITB) dan praktek disampaikan oleh profesional di bidang pengolahan LiDAR
22
LOKASI, WAKTU
KETERANGAN FOTO
Mei
RR Gd. S Lantai 1/ 18 Mei 2018
- Membahas rencana diskusi teknis dengan PPRT dan perusahaan pemetaan
- Menentukan jadwal rapat dengan PPRT sekaligus kunjungan ke perusahaan
RR Gd. S Lantai 1/ 24 Mei 2018
- Diskusi dengan tim teknis akuisisi PPRT
- Mendiskusikan penelitian serupa yang sudah pernah dilakukan dan kemungkinan penelitian ini dikembangkan ke depannya
- Mendapatkan rekomendasi perusahaan-perusahaan yang bergerak di bidang LiDAR
- Mendapatkan izin untuk menggunakan software Terrasolid milik PPRT
- PT Map Tiga Internasional
- PT ASI Pudjiastuti Geosurvey
- PT Surtech Prima Internasional
- Waktu: 30-31 Mei 2018
- Diskusi mengenai project atau riset yang sudah pernah dilakukan oleh perusahaan berkaitan dengan ekstraksi bangunan dari data LiDAR
23
LOKASI, WAKTU
KETERANGAN FOTO
- Sebagian besar belum pernah melakukan project tersebut, hanya melakukan percobaan namun belum pernah diimplementasikan dalam pekerjaan sesungguhnya
Juni
Diolah pada minggu pertama bulan Juni di Gd. R Lantai 1 (PPRT)
- Hasil building model extraction dari data LiDAR wilayah Surabaya (sampel area)
- Dilakukan dengan software Terrasolid
24
LOKASI, WAKTU
KETERANGAN FOTO
Juli
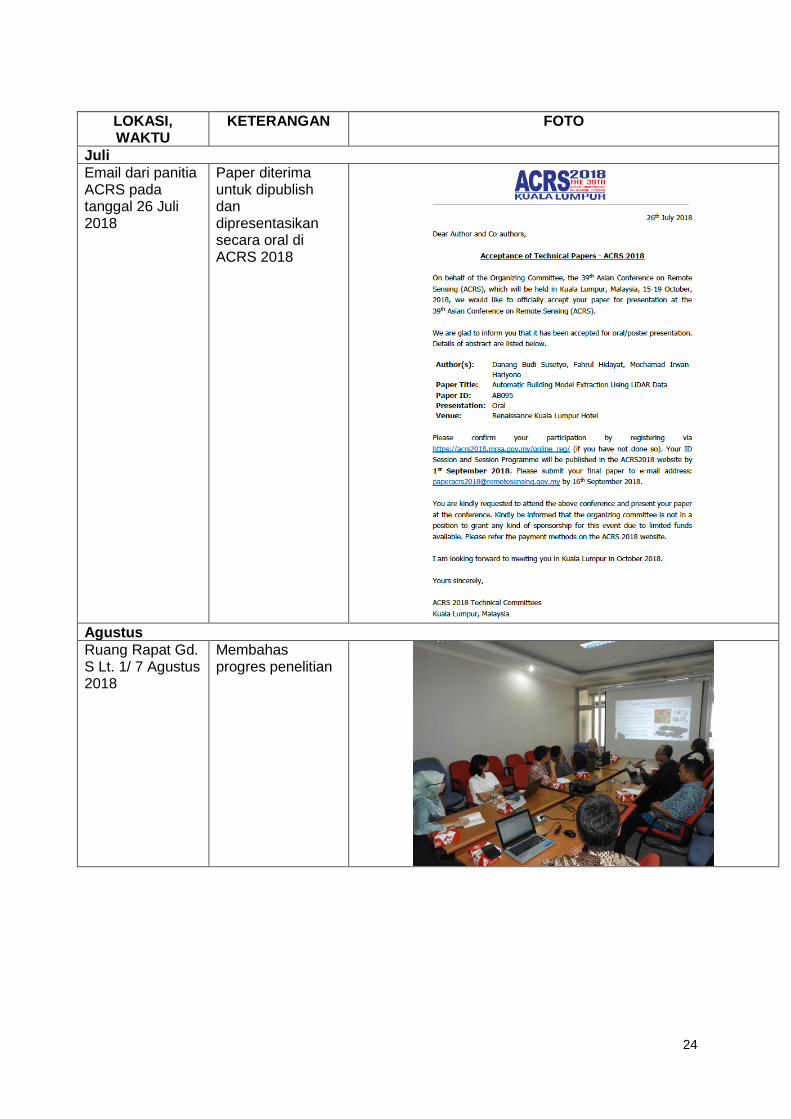
Email dari panitia ACRS pada tanggal 26 Juli 2018
Paper diterima untuk dipublish dan dipresentasikan secara oral di ACRS 2018
Agustus
Ruang Rapat Gd. S Lt. 1/ 7 Agustus 2018
Membahas progres penelitian
25
LOKASI, WAKTU
KETERANGAN FOTO
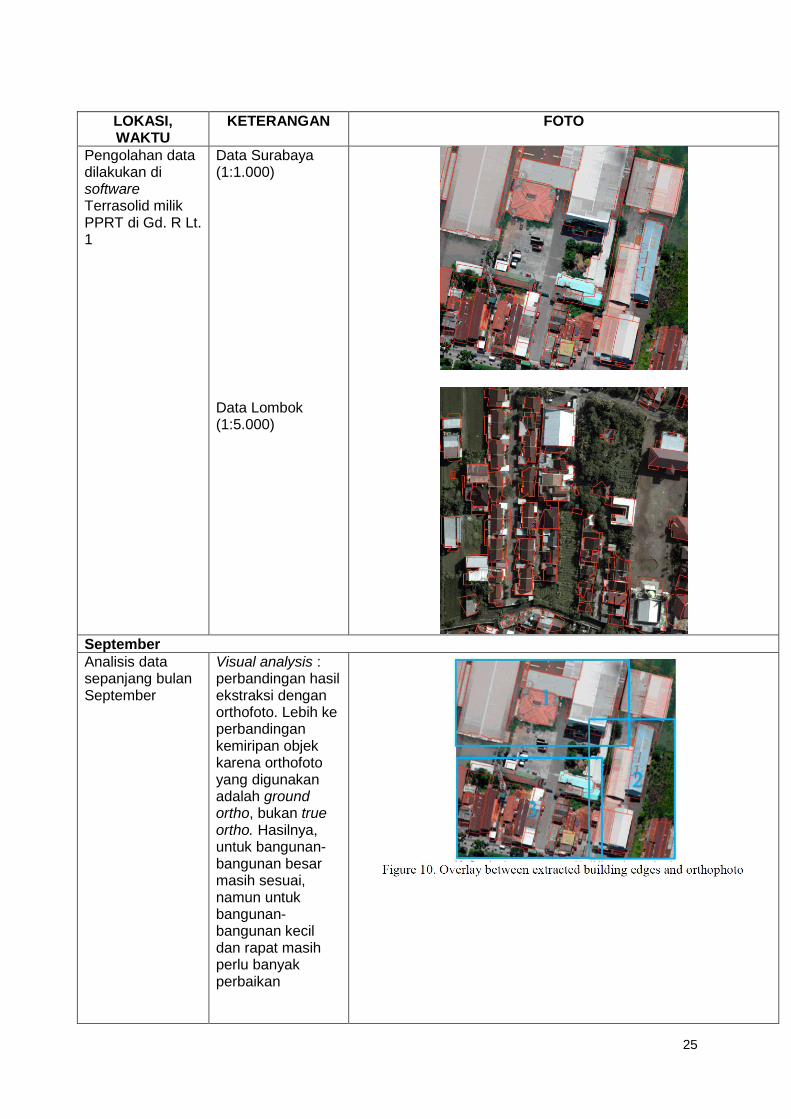
Pengolahan data dilakukan di software Terrasolid milik PPRT di Gd. R Lt. 1
Data Surabaya (1:1.000) Data Lombok (1:5.000)
September
Analisis data sepanjang bulan September
Visual analysis : perbandingan hasil ekstraksi dengan orthofoto. Lebih ke perbandingan kemiripan objek karena orthofoto yang digunakan adalah ground ortho, bukan true ortho. Hasilnya, untuk bangunan-bangunan besar masih sesuai, namun untuk bangunan-bangunan kecil dan rapat masih perlu banyak perbaikan
26
LOKASI, WAKTU
KETERANGAN FOTO
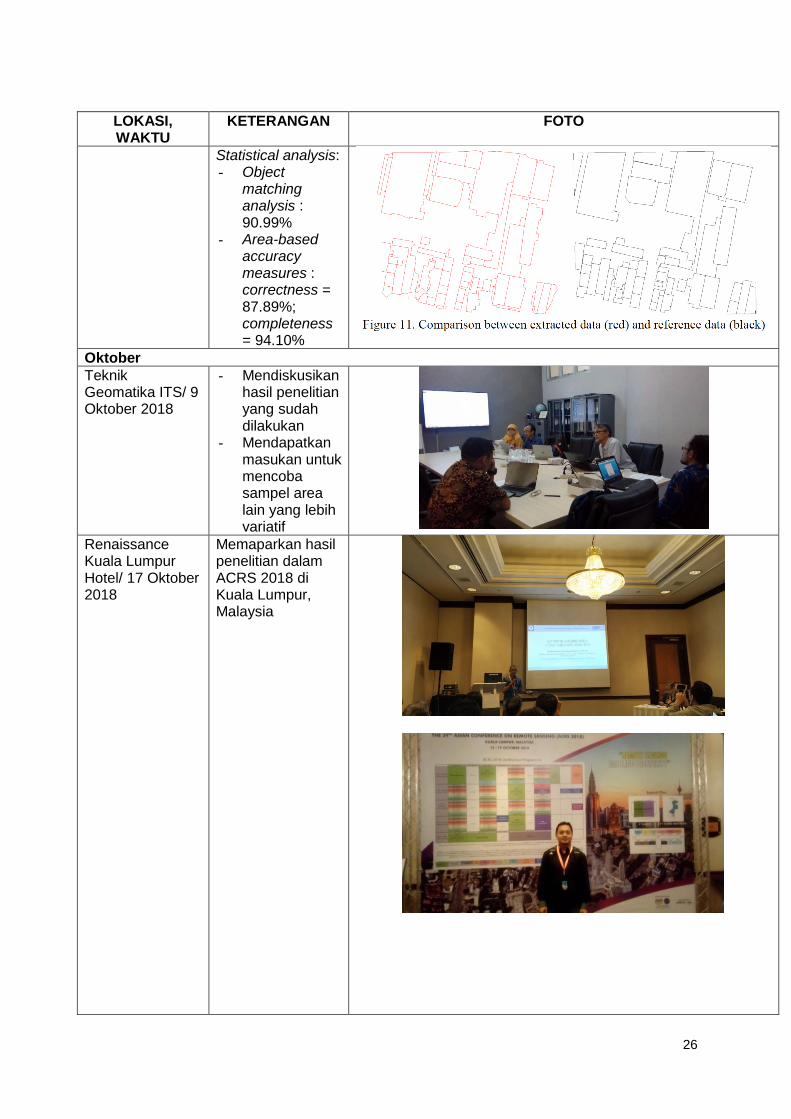
Statistical analysis: - Object
matching analysis : 90.99%
- Area-based accuracy measures : correctness = 87.89%; completeness = 94.10%
Oktober
Teknik Geomatika ITS/ 9 Oktober 2018
- Mendiskusikan hasil penelitian yang sudah dilakukan
- Mendapatkan masukan untuk mencoba sampel area lain yang lebih variatif
Renaissance Kuala Lumpur Hotel/ 17 Oktober 2018
Memaparkan hasil penelitian dalam ACRS 2018 di Kuala Lumpur, Malaysia
27
LOKASI, WAKTU
KETERANGAN FOTO
November
Sepanjang bulan November
Penyusunan draft laporan akhir
Desember Sepanjang bulan Desember
Finalisasi laporan akhir

28
LAMPIRAN 2. NOTULENSI RAPAT
Minutes of Meeting
Agenda Kick-off Meeting Penelitian Percepatan Pemetaan Skala Besar
Hari, tanggal Senin, 29 Januari 2018
Waktu 13.30 s/d selesai
Tempat Ruang Rapat Bidang Penelitian, Gd. S Lt.1 - BIG
Pimpinan
Rapat
Danang Budi Susetyo
Peserta Sesuai lampiran daftar hadir
Agenda Rapat:
• Penelitian Percepatan Pemetaan Skala Besar bertujuan untuk menghasilkan
penelitian yang dapat membantu mempercepat proses pemetaan RBI skala besar
• Ada dua tema penelitian yang diusulkan untuk kegiatan Penelitian Percepatan
Pemetaan Skala Besar, yaitu Kategorisasi Unsur dan Klasifikasi Digital
• Untuk kegiatan kategorisasi unsur bertujuan untuk mendapatkan skema basisdata
yang ideal
• Awal kegiatan ini sudah pernah dilakukan pada tahun 2017, namun belum
didapatkan hasil yang absolut
• Berdasarkan hasil penelitian sebelumnya maka perlu mengubah metode dari yang
sudah dilakukan agar didapatkan hasil yang lebih baik
• Untuk tema kegiatan kategorisasi unsur:
o Perlu dilakukan evaluasi metode dengan mempelajari laporan tahun 2017
o Perlu penentuan metode kuesioner yang lebih optimal dengan mempelajari
dan mengevaluasi kuesioner tahun 2017
o Mengoptimalkan statistik pengguna data dikaitkan dengan peraturan yang
mengikat masing-masing pengguna
• Target hasil yang diharapkan dari kuesioner tahun ini: Sampai sejauh mana
penggunaan RBI di kalangan konsumen/pengguna RBI
• Selain itu perlu membandingkan data eksisting multi skala pada wilayah yang
sama, serta menggunakan pendekatan generalisasi dan kartografi
• Untuk tema kegiatan klasifikasi digital:
o Tujuan untuk mengidentifikasi objek secara otomatis dari data foto udara
dan LiDAR
o Hasil klasifikasi belum digunakan untuk menggantikan digitasi, namun
lebih kepada membantu QC digitasi, menghitung luas pemukiman untuk
perencanaan anggaran
• Untuk kegiatan ini metode yang diusulkan adalah membandingkan hasil klasifikasi
objek bangunan menggunakan Object Based Image Analysis (OBIA) pada foto
udara dengan segmentasi hasil LiDAR

29
• Dalam pemrosesan citra berbasis objek, software yang digunakan adalah
eCognition
• Akan tetapi dalam implementasinya tahun 2017 yakni pada pesisir dan laut,
terdapat kendala akibat kondisi citra yang kurang baik. Meskipun sudah dilakukan
koreksi, masih ditemukan missclassified objek pada saat tahap klasifikasi
diimplementasikan
• Rencana lokasi survey adalah Tanjung Lesung (Jawa Barat) dan Lombok (NTB)
yang diagendakan dilaksanakan pada minggu-minggu awal bulan Mei
• Perlu dilakukan pengecekan apakah untuk kedua daerah tersebut data-data yang
diperlukan sudah lengkap
• Terkait SKP masing-masing personil diharapkan untuk membuat perjanjian kinerja,
harus ada pembagian tugas, masing-masing orang mengerjakan tahapan pekerjaan
yang berbeda
• Masing-masing individu dibagikan tugas sesuai arahan kepala bidang, untuk
memudahkan pada saat pengisian logbook
• Indikator kinerja masing-masing individu harus berupa output dokumen/laporan
bukan proses kegiatan
• Yang harus dilakukan selanjutnya yaitu studi literatur (prioritaskan jurnal
internasional), fokus pada metode yang akan diadopsi
• Target pertemuan selanjutnya sudah ada metode yang fix yang akan digunakan
• Rapat selanjutnya diagendakan pada minggu ke 2 atau 3 bulan Februari
Dokumentasi
Notulis
Ellen Suryanegara
30
Minutes of Meeting
Agenda Rapat Penentuan Metode Building Extraction
Hari, tanggal Jumat, 09 Februari 2018
Waktu 09.00 – 12.00 WIB
Tempat Ruang Rapat Bidang Penelitian, Gd. S Lt.1 - BIG
Pimpinan Rapat Danang Budi Susetyo (Dilan)
Peserta Sesuai lampiran daftar hadir
Agenda:
1. Terdapat tiga (3) metode yang akan diujicobakan dalam penelitian ini, yaitu:
➔ Li et al. (2013) → menggunakan data LIDAR dan Aerial Image. Ekstraksi data
LIDAR → point clouds, titik 3D, membedakan bentukan alam dan man-made
dari segi keteraturan point cloud. Aerial image digunakan untuk membentuk
initial edges. Point cloud disekitar initial images dibedakan menjadi peripheral
point dan edges point, yang kemudian di buffer. Tumpang tindih buffer antara
peripheral point dan edges point → true edges of an object.
➔ Audebert et al. (2016) → menggunakan SegNet architecthure (Badrinarayanan
et al, 2015) untuk menyediakan semantic labelling network. Dalam websitenya
(http://github.com/nshaud/DeepNetsForEO) menyediakan tools berbasis
phyton. Metode ini juga diimplementasikan oleh Marmanis (2016).
➔ Awrangjeb and Fraser (2013) → menggunakan OBIA dengan kombinasi data
LIDAR dan foto udara. Yang digunakan adalah rulebased segmentation.
2. Tujuan dari penelitian ini adalah Automasi pengenalan objek atau minimalisasi
campur tangan manusia dalam interpretasi objek. Citra hanya untuk membantu
pengenalan objek dari point cloud dari LIDAR.
3. Terdapat opsi metode ekstrasi (Awrangjeb, 2010) dengan transformasi citra NDVI
untuk membedakan building dan vegetasi. Dimana Data Lidar diekstraksi ke dalam
kelas ground dan non-ground → kemudian nilai NDVI digunakan untuk memilah
bangunan dan vegetasi.
4. Fahrul → Masukkan tentang metode → lihat
5. Masukkan:
a) Perlu dicoba untuk daerah yang kompleksitasnya tinggi, tidak seperti negara-
negara maju yang sudah tertata rapi.
b) Untuk segmentasi foto udara menggunakan e-Cognition berdasarkan pengalaman
sebelumnya tidak ada masalah, hanya saja pada perangkat lunak terdahulu jumlah
image object-nya terbatas 2 – 5 juta image object (pada saat seri Definiens 7)
c) Untuk metode OBIA, dapat menggunakan referensi yang lebih terkini dari
Blaschke et al (2016) dan Dragut et al. (2014) yang konsisten mengembangkan
tentang OBIA khususnya segmentasi.
31
- Rencana Tindak Lanjut:
a) Rencana FGD di minggu ke-2 bulan Maret 2018
b) Pengolahan data selama 3 minggu dengan 3 metode berbeda (Kelompok
terlampir). Kewajiban bagi setiap kelompok untuk update kemajuan penelitian
per minggu.
c) Untuk sub kegiatan “Kategorisasi Unsur”:
- kuesioner perlu disederhanakan, jenis kuesioner tertutup (jawaban tersedia),
Penyajian Peta RBI (digital: *.shp; cetak: kertas, pdf, jpeg).
- mengundang Kabalai Layanan (bu Retno) untuk sharing penelitian ini.
- Jika hasil kategorisasi unsur telah diperoleh, selanjutnya adalah uji coba
terhadap Operator di internal BIG, khususnya PPRT.
Lampiran:
Pembagian Kelompok Uji Coba Metode Ekstraksi:
No Li et al. (2013) Audeberg et al. (2016) Awrangjeb et al.
(2013)
1 Danang Budi Fahrul Hidayat M. Irwan Hariyono
2 Rizka Windiastuti Bambang Riadi Fahmi Amhar
3 Ellen Suryanegara Intan Pujawati Maslahatun Nashiha
4 Aninda W. Rudiastuti
5 Lalitya Narieswari
Notulis
Aninda W. Rudiastuti
Dokumentasi:
32
Minutes of Meeting
Agenda Rapat Pembahasan dan Pendalaman Metode Penelitian
Percepatan Pemetaan Skala Besar
Hari, tanggal Selasa, 20 Februari 2018
Waktu 09.00 - 11.00 WIB
Tempat Ruang Rapat Bidang Penelitian, Gedung S Lantai 1 BIG
Pimpinan
Rapat
Danang B. Susetyo
Peserta Sesuai lampiran daftar hadir
Rapat Pembahasan dan Pendalaman Metode Penelitian Percepatan Pemetaan Skala Besar
1. Penyusunan Kuesioner Kategorisasi Unsur
Fahrul Hidayat:
Tahun lalu telah dilakukan wawancara & pengumpulan data melalui kuesioner terkait RBI, namun datanya belum dapat mewakili tujuan penelitian yang diharapkan. Sehingga tahun ini dilakukan
penelitian untuk menentukan batasan unsur rupa bumi yang sering digunakan berdasarkan skala, mengingat RBI merupakan peta yang bermanfaat untuk banyak tujuan.
Faktor yang menentukan dalam pemilihan unsur peta yaitu:
- legibility (keterbacaan) - cost of production (ongkos produksi)
- obsolence (keusangan) - concept of landmark
Kesimpulan FGD tahun lalu: - KUGI kurang aplikatif
- masih terdapat kebingungan pemuatan unsur dalam peta RBI - kode unsur perlu disederhanakan
- kode unsur yang dimiliki muncul dengan latar belakang produksi - dari kode unsur itu diharapkan untuk dibuat hierarkinya
- RBI skala 1:5.000 menjadi lebih rumit
Penelitian terkait kategorisasi unsur memiliki beberapa kendala, antara lain model tidak bisa sama
dengan dunia nyata (terdapat error tertentu); konsep peta topografi yang masih relevan dgn RBI: karakteristik alami dan buatan; dan terdapat parameter yang dijadikan pertimbangan kategorisasi
unsur. Sedangkan tindak lanjut yang dapat dilakukan:
1. menambah data kebutuhan pengguna RBI 2. menyebarkan kuesioner kepada pihak yang pernah dan akan meminta data di BIG secara online
melalui link google form. 3. menyusun purwarupa kategorisasi unsur
4. uji coba terhadap operator
Th. Retno Wulan:
Berdasarkan pengalaman, penyebaran kuesioner (melalui berbagai media) memiliki tantangan tersendiri, di antaranya hanya sekitar 50% kuesioner yang kembali untuk diolah. Untuk kuesioner
IKM menggunakan jasa konsultan, dengan menumpang pada berbagai kegiatan BIG. Hal lain yang menjadi kendala yaitu terlalu banyaknya pertanyaan dalam kuesioner, pengisian kuesioner harus
didampingi, serta kuesioner melalui inageoportal pun banyak yang tidak diacuhkan.
Usulan dari peserta rapat:
1. pertanyaan yang cenderung serupa dapat diselipkan dengan kuesioner IKM 2. tanggal 1 Maret 2018 akan ada kuliah umum & penandatanganan MoU di UNIPA (Papua), bisa
diselipkan pada kegiatan ini.
33
3. kuesioner non-teknis bisa diletakkan di meja layanan. Sambil menunggu penyerahan data, user dapat mengisi kuesioner. Sebagai gambaran, dalam sehari terdapat sekitar 10 orang yang
datang ke Balai Layanan. 4. kuesioner teknis disebarkan melalui PTRA, karena pemda/KL yang datang ke BIG (dalam rangka
asistensi RTRW) sudah pasti mengerti terkait teknis pemetaan. 5. perhatikan dalam memilah responden, apakah mereka paham mengenai teknis pemetaan, atau
hanya pengguna pasif. 6. terdapat pertanyaan dalam kuesioner yang perlu analisis detail mengenai penggunaan unsur
RBI sesuai skala. Jika hanya 7 unsur utama yang ditanyakan, hal tersebut tidak dapat mewakili
pertanyaan pokok kuesioner. 7. pertanyaan no 4 & 13 (tujuan penggunaan RBI & kelengkapan RBI) bisa ditanyakan ketika FGD.
8. FGD mengundang pejabat (maksimal eselon 3) & staf teknis. Tim kita dipersiapkan untuk input data secara langsung selama FGD berlangsung.
2. Pendalaman Metode Penelitian Klasifikasi Digital Metode Li et al. (2013)
Ekstraksi Fitur Rupabumi secara Otomatis menggunakan Kombinasi Filtering LiDAR dan Canny Edge Detection
▪ LiDAR berbentuk point cloud, bisa jatuh maupun menembus kanopi pohon. ▪ filtering Lidar: menurunkan ketinggian dari DSM (surface) maupun DEM (elevation). metode
yang digunakan dapat mengacu pada TIN, Elevation Threshold with Expand Window (ETEW) filter, Progressive Morphology (Morph) Filter, Iterative Polynomial Fitting, Maximum Local Slope.
▪ Proses Canny Edge Detection. inti dari metode ini yaitu mendeteksi batas suatu objek
berdasarkan intensitas gradiennya. ▪ dari LiDAR diperoleh edge point & peripheral point, kemudian hasil buffering kedua point ini
menghasilkan initial base yang membentuk poligon objek.
▪ hasil uji coba filtering LiDAR dan pengolahan menggunakan matlab belum menghasilkan image yang optimum.
Metode Audebert et al. (2016)
▪ building extraction
▪ hasil challenge ISPRS, dishortlist 10 besar berdasarkan nilai akurasinya, kemudian metode & pustaka/linknya dibandingkan yang terbaik.
▪ inti dari metode Marmanis et al. (2018) yaitu membandingkan hasil dari berbagai analisis edge detection (10 uji). menggunakan software Caffe (OS).
▪ masih terdapat keraguan terkait GPU (Graphic Processing Unit) sebagai hardwarenya. ▪ hasil Audebert memperlihatkan akurasi sekitar 80an%. Audebert menggunakan software
PyTorch berbasis phyton. pengolahan/analisis image ini pun terkendala GPU.
Metode Awrangjeb et al. (2013)
Detection & Extraction ▪ Data mentah LiDAR, foto udara, & point plot ditampilkan sebagai point berketinggian (titik
tertinggi objek). Kemudian dilakukan clustering/klasifikasi berdasarkan coplanarity of points.
Setelah itu dilakukan identifikasi masing2 objek bangunan, dengan menghilangkan objek tumbuhan kecil. Hingga dihasilkan point-point yang membentuk objek bangunan.
▪ Aurangjeb menyediakan software yang bisa kita gunakan. ▪ Pada proses Extraction, akan dilakukan pendekatan refinement of planar segments pada hasil
detection, hingga hanya objek dengan poligon bersegi yang dihasilkan (poligon pohon yang acak akan hilang).
▪ hasil uji coba menggunakan Global Mapper baru sampai memunculkan atap bangunan.
Kesamaan dari 3 Metode: detection objeknya menggunakan Canny. ketiga metode tersebut akan
diterapkan hingga akhir penelitian, untuk dilakukan perbandingan metode & hasil.
Lalitya Narieswari:

34
menguji coba pada ecognition, dengan prosedur yang hampir sama dan pendekatan algoritma
tertentu.
Tindak Lanjut
1. Rapat lanjutan hari Senin, 26 Februari 2018 untuk persiapan FGD 14 Maret 2018 (diharapkan ketiga metode tersebut sudah semakin matang untuk diaplikasikan)
2. FGD khusus untuk klasifikasi digital pada 14 Maret 2018, tempat tentatif.
Notulis,
Intan Pujawati Lampiran Dokumentasi
35
Minutes of Meeting
Agenda Rapat Tindak Lanjut FGD Percepatan Pemetaan Skala Besar
Hari, tanggal Kamis, 15 Maret 2018
Waktu 13.30 s/d selesai
Tempat Ruang Rapat Bidang Penelitian, Gd. S Lt.1 - BIG
Pimpinan Rapat Danang Budi Susetyo
Peserta Sesuai lampiran daftar hadir
Agenda Rapat:
Kesimpulan Saran Narasumber
• Apabila menggunakan foto udara dan LiDAR, harus true ortho, dan kedua data
tersebut harus match
• Akurasi LiDAR tergantung dari jumlah ppm (point per square meter).
• Standar data LiDAR di PPRT adalah 4 ppm, sementara berdasarkan hasil diskusi
narasumber agar secara geometrik akurat minimal membutuhkan 7 ppm. Data
Surabaya sebanyak 8-12 ppm, pada bagian overlap sebanyak 16-18 ppm
• Validasi bisa dilakukan dengan:
o Membandingkan dengan foto udara (ortho photo)
o Pengukuran di lapangan
o Membandingkan dengan luas bangunan yang akurat (jika 2D) + tinggi
(height) jika 3D
o Stereoplotting interaktif
• Wire frame dapat digunakan untuk meminimalisir hasil yang bergerigi
• Semakin banyak jumlah ppm, intensitas akan semakin baik dalam
mengklasifikasikan setiap objek
• Coba Point Cloud Library (PCL): open source
• Buat road map jangka pendek, menengah, dan panjang
• Manfaatkan data center yang ada di BIG
• Gunakan terrasolid sebagai pembanding hasil klasifikasi dan filtering LiDAR
Diskusi Rapat
• Perlu Pelatihan LiDAR (tentukan waktu, tempat, dan trainer). Fokus mempelajari
filtering menggunakan Terrasolid
o Agar personil memiliki pengetahuan yang sama
o Jadwal 23-27 April 2018,
o Trainer: vendor terrasolid
o Sebelum training disarankan untuk berkunjung ke perusahaan terlebih
dahulu. PIC training: Danang, PIC ke perusahaan: Irwan)
36
• Minta data Surabaya (PIC: Bu Rizka, surat sudah dibuat)
o Tahun 2016 pernah diminta supervisi kegiatan kota surabaya, pemotretan
udara dan lidar
o Namun datanya kita tidak pegang, karena menggunakan dana Surabaya
o Saat ini sedang dibuat surat sedang menunggu ttd sestama terkait
permintaan data
• Cek data Veihingen (soon, semua personil disarankan googling)
• Semua lakukan uji coba dengan MATLAB, sementara masih menggunakan data
Lombok (next progress report: 30 Maret 2018)
• Survei lapangan? Apakah masih diperlukan:
o Cukup survey ke perusahaan-perusahaan yang menggunakan data LiDAR
• Yang diharapkan pusat teknis adalah bagaimana hasil penelitian ini bisa mengolah
data LiDAR secara praktikal tidak hanya scientific
• Sebaiknya output penelitian ini juga berupa panduan
• Cek ke PPRT kegiatan yang menggunakan terrasolid, perhatikan bagaimana cara
kerjanya
• Cek perusahaan yang menggunakan data LiDAR contohnya Waindo, bisa sebagai
survey lapangan
• Diusahakan dilakukan sebelum pelatihan, agar bisa tahu dengan spesifik apa yang
ingin diperjelas atau dibutuhkan dalam training
Dokumentasi
Notulis
Ellen Suryanegara
37
Minutes of Meeting
Agenda Rapat Pembahasan Penelitian Percepatan Pemetaan Skala
Besar dan Rencana Workshop Pengolahan LiDAR
Hari, tanggal Senin, 23 April 2018
Waktu 13.30 s.d. selesai
Tempat Ruang Rapat Bidang Penelitian, Gedung S Lantai 1 BIG
Pimpinan
Rapat
Kepala Bidang Penelitian
Peserta Sesuai lampiran daftar hadir
Rapat Pembahasan Penelitian Percepatan Pemetaan Skala Besar dan Rencana
Workshop Pengolahan LiDAR
1. Pembahasan Metode Penelitian Klasifikasi Digital Metode Li et al. (2013)
Ekstraksi Fitur Rupabumi secara Otomatis menggunakan Kombinasi Filtering LiDAR dan Canny Edge Detection
▪ LiDAR berbentuk point cloud, bisa jatuh maupun menembus kanopi pohon.
▪ filtering Lidar: menurunkan ketinggian dari DSM (surface) maupun DEM (elevation). metode yang digunakan dapat mengacu pada TIN, Elevation Threshold with Expand Window (ETEW) filter, Progressive Morphology (Morph) Filter, Iterative Polynomial Fitting, Maximum Local Slope.
▪ Proses Canny Edge Detection. inti dari metode ini yaitu mendeteksi batas suatu objek
berdasarkan intensitas gradiennya.
▪ dari LiDAR diperoleh edge point & peripheral point, kemudian hasil buffering kedua point ini menghasilkan initial base yang membentuk poligon objek.
▪ hasil uji coba filtering LiDAR dan pengolahan menggunakan matlab belum menghasilkan image yang optimum.
Metode Audebert et al. (2016) ▪ building extraction
▪ hasil challenge ISPRS, dishortlist 10 besar berdasarkan nilai akurasinya, kemudian metode & pustaka/linknya dibandingkan yang terbaik.
▪ inti dari metode Marmanis et al. (2018) yaitu membandingkan hasil dari berbagai analisis edge detection (10 uji). menggunakan software Caffe (OS).
▪ masih terdapat keraguan terkait GPU (Graphic Processing Unit) sebagai hardwarenya.
▪ hasil Audebert memperlihatkan akurasi sekitar 80an%. Audebert menggunakan software PyTorch berbasis phyton. pengolahan/analisis image ini pun terkendala GPU.
Metode Awrangjeb et al. (2013)
Detection & Extraction
▪ Data mentah LiDAR, foto udara, & point plot ditampilkan sebagai point berketinggian (titik tertinggi objek). Kemudian dilakukan clustering/klasifikasi berdasarkan coplanarity of points.
Setelah itu dilakukan identifikasi masing2 objek bangunan, dengan menghilangkan objek tumbuhan kecil. Hingga dihasilkan point-point yang membentuk objek bangunan.
▪ Aurangjeb menyediakan software yang bisa kita gunakan. ▪ Pada proses Extraction, akan dilakukan pendekatan refinement of planar segments pada hasil
detection, hingga hanya objek dengan poligon bersegi yang dihasilkan (poligon pohon yang
acak akan hilang). ▪ hasil uji coba menggunakan Global Mapper baru sampai memunculkan atap bangunan.
Kesamaan dari 3 Metode: detection objeknya menggunakan Canny. ketiga metode tersebut akan
diterapkan hingga akhir penelitian, untuk dilakukan perbandingan metode & hasil.
Nursugi:
38
▪ LiDAR itu sekali memancarkan gelombang, terdapat beberapa echo yang memantul dari
beberapa objek. Yang dicari yaitu “last echo”
▪ Perlu dipelajari lebih lanjut mengenai klasifikasi nilai intensitas berdasarkan nilai digital signaturenya, serta ID digital dan ketelitian GPS.
▪ Cari di internet: LiDAR last data structure & last reader untuk Matlab (M-file, untuk informasi per titik)
▪ Perlu dingat bahwa LiDAR tidak selalu bagus. Ada kalanya terdapat kekurangan pada LiDAR dan image-nya. Material objek yang berbeda dapat memberikan hasil pengolahan yang
berbeda pula.
▪ Hasil klasifikasi LiDAR sudah dapat memperlihatkan 8 kelas (berbeda dengan yang dipahami oleh PPRT yang baru menghasilkan kelas ground & non-ground).
2. Rencana Workshop Pengolahan LiDAR
▪ Workshop ini direncanakan dilaksanakan pada tanggal 30 April, 2, 3, dan 4 Mei 2018
bertempat di hotel di Bogor. ▪ Materi workshop akan disampaikan oleh Harintaka (UGM), Boedi Soeksmantono (ITB), dan PT
Waindo SpecTerra.
Tindak Lanjut 3. Perlu mem-fix-kan nominatif jasa profesi untuk narasumber workshop.
4. Anggaran honor output kegiatan dialihkan ke superkomputer yang mumpuni untuk digunakan
dalam pengolahan LiDAR, maupun data “berat” lainnya. 5. Perlu software LiDAR for Linux dan penggunaan ENVI LiDAR.
Notulis,
Intan Pujawati
Lampiran Dokumentasi
39
Minutes of Meeting
Agenda Rapat Tindak Lanjut Penelitian Pemetaan Skala Besar
Hari, tanggal Jumat, 18 Mei 2018
Waktu 13.30 WIB s/d selesai
Tempat Ruang Rapat Bidang Penelitian, Gd. S Lt.1 - BIG
Pimpinan Rapat Nursugi
Peserta Sesuai lampiran daftar hadir
HASIL DISKUSI:
• Rapat kali ini lebih untuk membicarakan perencanaan penyerapan anggaran karena
anggaran perjalana dinas masih cukup banyak, disarankan oleh perencana untuk
segera diserap
• Opsi yang dapat dilakukan yaitu:
o ikut supervisi dengan PPRT:
▪ Mulai dari tahap perencanaan (jalur terbang, GCP/ICP) hingga
pemotretan udara
▪ Hanya ikut pada tahapan inti yang paling dibutuhkan oleh peneliti
▪ Tujuan: agar peneliti semakin memahami proses perencanaan pemotretan
udara
o Ikut dalam kegiatan pemotretan udara PPRT:
▪ Ikut ke lapangan selama 5-7 hari
▪ Tujuan: agar peneliti semakin memahami proses akuisisi foto udara dan
LiDAR
o Survei GCP:
▪ Tujuan: uji akurasi DTM hasil filtering
▪ Hampir sama dengan kegiatan pada tahun 2017
• Sebaiknya diarahkan ke penguatan di hasil ekstraksi sejauh mana, bukan ikut
akuisisi data, karena kita menggunakan data yang sudah diakuisisi
• Kegiatan ini dilakukan berdasarkan hasil proses kita, atau ikut prosesing ekstraksi,
kurang pas apabila ikut supervisi pemotretan
• Anggaran perjalanan bisa diarahkan untuk ikut untuk proses ekstraksi di
perusahaan yang menghasilkan data LiDAR
• Berdasarkan ilmu yang sudah didapat direformulasikan kembali karena terkait
processing LiDAR permasalahan kebanyakan di noise
40
• Bisa juga ke pemerintah daerah Surabaya untuk mengambil data yang belum
terambil
• LiDAR ini kan untuk percepatan, namun apabila ditemukan tidak ada yang
menggunakan maka menjadi penemuan apakah ada kendala atau hal lainnya
• Arahannya agar pas ke processing bukan ke akuisisi data, disarankan ke perusahaan
yang pernah melakukan proses tersebut, ditelaah lebih lanjut bagaimana cara
processingnya
• Menggali informasi mengapa permasalahan penggunaan software LiDAR tersebut
kurang digunakan padahal bisa mempercepat proses pemetaan skala besar
• Alternatif perusahaannya selain Waindo, yaitu ada Aerovisi, Indah Unggul
Bersama (IUB), Asi Pudjiastuti Geosurvey (APG), Karvak, Geopranata Cipta,
Atlas Delta Satya
• Segera dijadwalkan diskusi internal dengan PPRT hasil pengolahan di kita hasilnya
kemudian bisa dibawa untuk bahan diskusi ke perusahaan, contohnya bisa
menggunakan data Surabaya
• Selain itu diadakan kunjungan diskusi ke akademisi di UGM dan ITB paralel
tanggal 31 Mei-1 Juni
• Mulai dilakukan pembagian tugas untuk penyusunan Laporan akhir penelitian
Notulis
Ellen Suryanegara
Dokumentasi:
41
Minutes of Meeting
Agenda Diskusi Teknis Penelitian Ekstraksi Fitur Bangunan secara
Otomatis Menggunakan Data LiDAR
Hari, tanggal Kamis, 24 Mei 2018
Waktu 09.00 s/d selesai
Tempat Ruang Rapat Bidang Penelitian, Gd. S Lt.1 - BIG
Pimpinan Rapat Nursugi, ST (Kepala Bidang Penelitian)
Peserta Sesuai lampiran daftar hadir
Diskusi:
Rapat dilaksanakan oleh bidang Penelitian dengan mengundang pihak PPRT (Pusat
Pemetaan Rupabumi dan Toponim) dalam rangka diskusi terkait teknis otomasi ekstraksi
fitur bangunan menggunakan data LiDAR. Paparan progress penelitian disampaikan oleh
Danang Budi Susetyo. Hasil diskusi dirangkum dalam beberapa point sebagai berikut:
❖ Dalam pelaksanaan penelitian Pemetaan Skala Besar (SKB), bidang penelitian
terkendala oleh ketersediaan license software Terrasolid. Dalam hal ini PPRT akan
memberikan support yakni peminjaman software, sehingga kegiatan ekstraksi fitur
bangunan menggunakan software Terrasolid tetap dapat dilaksanakan dan untuk
keamanan publikasi hasil penelitian yang diolah menggunakan Terrasolid.
❖ Terkait dengan pengalaman ekstraksi fitur dari data LiDAR menggunakan Terrasolid
di PPRT, selama ini dilakukan oleh mahasiswa yang melaksanakan KP (Kuliah
Praktek) di PPRT.
❖ Untuk penelitian SKB, data yang akan digunakan adalah LiDAR wilayah Mandalika.
Referensi terkait ekstraksi fitur bangunan dengan menggunakan LiDAR yang pernah
dilakukan oleh perusahaan akan diberikan oleh pihak PPRT. Daftar perusahaan yang
berpengalaman dalam ekstraksi dari data LiDAR tercantum diakhir laporan.
❖ Probabilitas metode otomasi ekstraksi data LiDAR untuk menggantikan
stereokompilasi manual sangat besar → hanya saja jika hanya fokus pada pemanfaatan
software Terrasolid maka proses otomatisasi hanya diterapkan pada data LiDAR,
sedangkan harapannya ada otomatisasi untuk hasil orthophoto
❖ Terkait rencana kegiatan lapangan, Kabid Penelitian menginformasikan akan adanya
kegiatan mapping 3D city model di Jogjakarta yang akan dilaksanakan setelah lebaran.
Hal ini dapat menjadi salah satu alternatif rencana kegiatan lapangan bagi kegiatan
penelitian SKB, dimana survei yang akan dilaksanakan adalah akuisisi pengambilan
foto udara dengan banyak GCP dan ICP.
❖ Pelaksanaan kontrol kualitas dari hasil filtering data LiDAR salah satunya dengan
membandingkan surface hasil ekstraksi data LiDAR dengan titik di lapangan.
Sementara itu, kontrol kualitas untuk hasil visualisasi data LiDAR adalah dengan
membandingkannya dengan orthophoto dan RBI (contoh: Kota Surabaya).
❖ Tantangan penelitian ekstraksi fitur dari data LiDAR antara lain:
a) Peningkatan ketelitian ekstraksi fitur, dimana tanpa bantuan foto stereo pihak teknis
(PPRT) sudah mendapat ketelitian sekitar 80%.
42
b) Tantangan pengembangan ekstraksi data LiDAR. Filtering data LIDAR di Indonesia
lebih menantang karena variasi bentukan di Indonesia (perbedaan rumah, perbedaan
objek dalam wilayah yang kecil).
c) Pengembangan otomasi ekstraksi dengan memanfaatkan berbagai software
pemrograman.
❖ List perusahaan yang berpengalaman dalam ekstraksi data LiDAR:
Nama Perusahaan Alamat Kontak
PT. MAP TIGA
INTERNASIONAL
Jl. Pejaten Barat II No. 20 Unit A
RT.003/ 008. Kel. Pejaten Barat, kec.
Pasar Minggu, Jak-Sel
Email: [email protected]
(021) 71793137
1. PT. ASI
2. PUDJI GEOSURVEY
Operation:
Gedung Graha Sartika 2nd Floor No.
206 Jl. Dewi Sartika No. 357,
Cawang, Jakarta 13630;
Head office:
Jl. Ki Mangunsarkoro 21 Jakarta
10310
Website: www.geosurvey.co.id
Email: [email protected]
Telp: 021-3145182 / Fax: 021-
31935361
CP : Listiyo 081268601615
3. PT. Karvak Nusa
Geomatika
4.
Kompleks Ruko Cempaka Mas Blok
M1 No. 20-21 J1.
Letjend Suprapto Jakarta Pusat
Indonesia 10640
CP : Indra +6282121979716
PT. Waindo Specterra
Kompleks Perkantoran Pejaten Raya
#7-8
Jl. Pejaten Raya No.2 Jakarta Selatan
12510
CP :
Bu Lisa +62 813-1004-0469
+62 21 7986405
+62 21 5703246
PT. Surtech Prima
International
Satmarindo Building Jl.Ampera Raya
No.5 Jakarta 12079
Phone +62-21-78834813
Fax +62-21-78834913
Email :
CP :
Pak Sidik Permana 081-290-
009032
DOKUMENTASI KEGIATAN
Notulis,
Aninda W. Rudiastuti

43
Minutes of Meeting
Agenda Pembahasan tahap akhir penelitian dan rencana publikasi
ilmiah
Hari, tanggal Selasa, 7 Agustus 2018
Waktu 09.00 s/d selesai
Tempat Ruang Rapat Bidang Penelitian, Gd. S Lt.1 - BIG
Pimpinan Rapat Nursugi, ST (Kepala Bidang Penelitian)
Peserta Sesuai lampiran daftar hadir
Diskusi:
1. Progres penelitian:
• Pengolahan data LiDAR Surabaya:
✓ Sampai pada pembentukan building model menggunakan Vectorize Building
✓ Sedang dikerjakan: mempelajari tools-tools editing manual seperti building
patches tool box dan building edges tool box
✓ Selama ini dilakukan menggunakan software Terrasolid milik PPRT
✓ Perlu masukan terkait metode dalam melakukan analisis
✓ Target akhir penelitian:
- Mendapatkan roof edges dari data LiDAR, kemudian dibandingkan dengan
data bangunan RBI
- Melakukan editing klasifikasi manual pada data LiDAR, kemudian
dibandingkan hasilnya dengan data hasil fully automatic
✓ Penelitian LiDAR ini juga menghasilkan output lain selain building extraction,
yaitu menghitung karbon
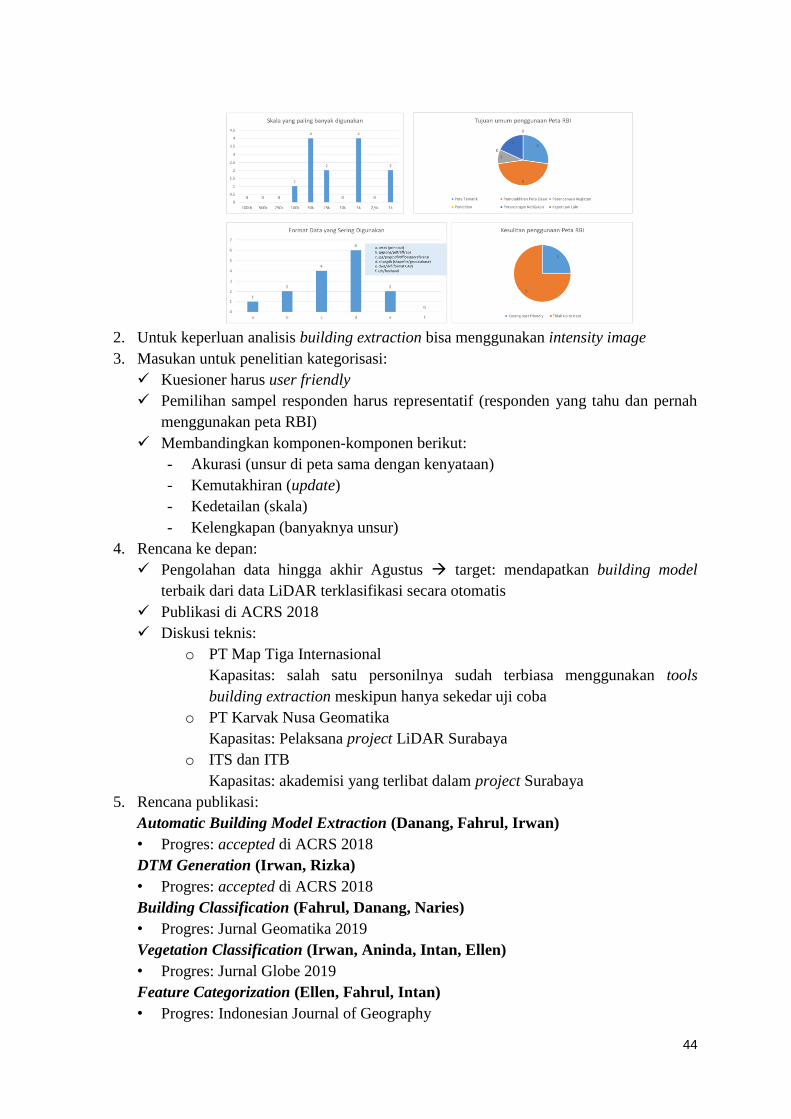
• Kategorisasi unsur: rekap hasil kuesioner khusus (dari PTRA) dan umum (dari
google form)
44
2. Untuk keperluan analisis building extraction bisa menggunakan intensity image
3. Masukan untuk penelitian kategorisasi:
✓ Kuesioner harus user friendly
✓ Pemilihan sampel responden harus representatif (responden yang tahu dan pernah
menggunakan peta RBI)
✓ Membandingkan komponen-komponen berikut:
- Akurasi (unsur di peta sama dengan kenyataan)
- Kemutakhiran (update)
- Kedetailan (skala)
- Kelengkapan (banyaknya unsur)
4. Rencana ke depan:
✓ Pengolahan data hingga akhir Agustus → target: mendapatkan building model
terbaik dari data LiDAR terklasifikasi secara otomatis
✓ Publikasi di ACRS 2018
✓ Diskusi teknis:
o PT Map Tiga Internasional
Kapasitas: salah satu personilnya sudah terbiasa menggunakan tools
building extraction meskipun hanya sekedar uji coba
o PT Karvak Nusa Geomatika
Kapasitas: Pelaksana project LiDAR Surabaya
o ITS dan ITB
Kapasitas: akademisi yang terlibat dalam project Surabaya
5. Rencana publikasi:
Automatic Building Model Extraction (Danang, Fahrul, Irwan)
• Progres: accepted di ACRS 2018
DTM Generation (Irwan, Rizka)
• Progres: accepted di ACRS 2018
Building Classification (Fahrul, Danang, Naries)
• Progres: Jurnal Geomatika 2019
Vegetation Classification (Irwan, Aninda, Intan, Ellen)
• Progres: Jurnal Globe 2019
Feature Categorization (Ellen, Fahrul, Intan)
• Progres: Indonesian Journal of Geography

45
DOKUMENTASI KEGIATAN
Notulis,
Danang Budi Susetyo
46
LAMPIRAN 3. NOTULENSI FGD 1 (MARET 2018)
Minutes of Meeting
Agenda FGD Penelitian Percepatan Pemetaan Skala Besar
Hari, tanggal Jumat, 9 Maret 2018
Waktu 08.00 s/d selesai
Tempat Ruang Meeting Emerald, The Sahira Bogor
Pimpinan Rapat Wiwin Ambarwulan
Peserta Sesuai lampiran daftar hadir
CATATAN HASIL FGD:
Pengarahan Kepala Pusat Penelitian, Promosi, dan Kerjasama
• BIG saat ini fokus pada penelitian untuk mendukung kegiatan/penyelenggaran IG di BIG
• FGD ini fokus untuk mendukung kegiatan penyelenggaran Informasi Geospasial Dasar
• Masukan dari para narasumber sangat diharapkan dalam mendukung pengembangan riset ini
• Perlu dibuat daftar penelitian yang telah dibuat oleh BIG selama ini agar dapat bermanfaat bagi pusat teknis BIG dan publik
• Sebagai informasi tambahan, saat ini BIG sedang mengushakan agar jurnal geomatika dapat terakreditasi tahun ini
Diskusi Sesi I
Danang Budi Susetyo
• Penelitian tahun ini terkait ekstrasi fitur otomatis, sudah dilakukan studi pustaka dan dipilih beberapa metode yang akan digunanakan
• FGD kali ini mengharapkan narasumber untuk memberikan masukan terkait metode yang akan digunakan
• Metode pertama dari Yong Li, Huayi Wu, Ru An , Hanwei Xu, Qisheng He, Jia Xu: An Improved Building Boundary Extraction Algorithm Based on Fusion of Optical Imagery and LiDAR Data
• Dalam metode ini, prosesnya filtering untuk menghasilkan building, dari pointcloud dihasilkkan building, pointcloud tepi bangunan
• Metode ini juga menggunakan Canny edge detector (metode lama dari tahun 1986)
• Selain itu dilakukan smoothing untuk menghilangkan noise • Digunakan perbedaan nilai gradien untuk mengindentifikasi edge dari
building
47
• Ditetapkan treshold atas dan bawah untuk menghilangkan nilai gradien yang lemah
• Dilakukan klasifikasi untuk mendapatkan poin bangunan, kemudian didapat bagian tepi bangunan, edge point dan periferal point
• Kombinasi objek yang dibentuk canny dan overlap antara edge dan per point didapat initial edge
• Dikoreksi lagi misal segmen satu-4, koreksi menggunakan LiDAR, apabila ada yang jauh, paling jauh sebesar spacing grid antar point diremove
• Pengujian sementara sudah dilakukan, untuk filtering, fokusnya memisahkan bangunan
• Direncanakan untuk menggunakan nilai intensitas LiDAR • Klasifikais dan filtering untuk memisahkan ground dan non ground dilihat
windownya apabila objek kurang dari window dia tdk akan diklasidikasi, apabila lebih dari sekian diklasifikasikan berbeda
• Untuk canny edge detection: hasilnya masih kasar perlu diujicobakan lagi terutama untuk nilai treshold, dimohon masukannya
• Pertanyaan: o Apakah metode validasi/uji akurasi geometri yang paling tepat? o Filtering menggunakan nilai intensitas LiDAR o Parameter yang tepat untuk processing Canny Edge Detection untuk
klasifikasi objek di foto udara
Dr. Ade Komara Mulyana (Kepala Bidang Pemetaan Rupabumi Skala Besar) :
• Building extraction sumber datanya berasal dari aerial photo and LiDAR Data • Sebagai informasi data LiDAR digunakan untuk pemetaan rupabumi indonesia,
banyak data LiDAR yang dapat untuk digunakan penelitian • Yang perlu diperhatikan terutama adalah data source-nya, apakah
menggunakan data LiDAR saja atau data foto atau keduanya • Menggunakan foto saja memungkinkan, apalagi menggunakan multiple image • Menggunakan Ortho foto memiliki kelebihian kontinuitas namun memiliki
kelemahan di segi posisi, karena foto yang dihasilkan foto pada level ground/tanah dan pada saat mengortorektifikasi menggunakan DTM, sehingga yang diyakini kebenarannya adalah yg ditanah, padahal LIDAR → point cloud
• Mengapa yang dihasilkan ground ortho karena DSM yang dimiliki tidak cukup rapat untuk menegakan building secara sempurna
• LiDAR → (+) presisi secara ketinggian , (-) jika data tidak rapat maka akan ada bangunan yang meliuk
• LiDAR memiliki ketelitian 3 dimensi yang tepat, LiDAR juga bisa mndeteksi building untuk memisahkan ground dengan non ground
• Photo+LIDAR → (+) presisi secara geometeri.
• Best Option?? BIG DATA → Groundorthopoto; 4 ppm Lidar data (relative kerapatannya rendah untuk pemodelan 3D)
• Apabila menggunakan foto dan LiDAR keduanya harus match, akan ada masalah di objek yang tinggi sehingga harus menggunakan true ortho photo
• Data yang dimiliki oleh BIG adalah data:
48
o Ground ortho photo o 4 ppm LiDAR data (4 titik per meter persegi) namun relatif kurang
untuk 3D modelling • Lebih baik menggunakan LiDAR data karena apabila menggunakan ground
ortho akan ada kesulitan • Tantangan selanjutnya adalah menghasilkan true ortho yang baik • Pernah dilakukan extratcted building planes from LiDAR data, compared with
ground ortho hoto (BIG Mandalika Project, 2016) • Perlu diperhatikan Level of detail mau mengekstrak bangunan sampai sedetil
apa, karena algoritmanya berbeda, untuk di BIG sepertinya cukup di LOD0 di skala 1:5.000
• Mengekstrasi ada 2 model yaitu Model driven vs data driven, apabila model driven model buildingnya sudah ada dimatchkan dengan data, untuk data driven: bentuk building mengikuti data yang ada
• Gedung di indonesia tidak beraturan sehingga lebih baik cocok menggunakan data driven, apabila sudah disepakatai tinggal mencari algortimanya
• Poin selanjutnya adalah vectorisasi walaupun 100% automatic extraction belum ada
• Beberapa algoritma mengekstrak area, beberapa garis • Tetap diperlukan intervensi operator untuk meluruskan garis a. Jangan mendeteksi edge tetapi medeteksi corner, karena Vektorisasi batas
(Edge detection) --> extraksi batas area umumnya belum lurus (masih
bergerigi)
• Poin terakhir dari sisi praktikalitasnya, ketika algoritma tidak terimplemetnasikan dalam software. Masih dalam coding atau mathlab itu belum practical
• Terkait kemampuan terrasolid, beberapa tahun terakhir pernah dilakukan dan cukup berhasil mengektrak building
• Jangan mengandalkan software yang sudah jadi, harus mampu menggunakan coding sendiri
• Sebagian menggunakan istilah feature or object extraction, apakah ada terminologi lain
• Data LiDAR point per meter square (ppm), kemampuan mendeteksi ketinggian • Terkait data LiDAR dapat didapatkan di BIG dengan bersurat • 3 paper tidak mengeksploitasi keunngulan geomatri
Wildan Firdaus, S.T., M.Eng.Sc (Pusat Pemetaan Rupabumi dan Toponim) :
• Vectorize Building → parameternya jarak dan sudut
• Untuk menentukan parameter yang tepat dalam ekstraksi building perlu iterasi dan pengulangan ujicoba
• Langkah-langkan membuat bangunan 3D: klasifikasi rutin → secara umum algoritma klasifikasi low point → by heigt from ground → ground → building
• Pernah dilakukan percobaan menggunakan data LiDAR pontianak untuk menghasilkan peta skala 1:2000
49
• Hasil menemukan parameter yang tepat seoptimal mungkin 80% terekstract sudah cukup
• Kesimpulan: o Perlu dilakukan pengecekan model bangunan, tidak bisa mengandalkan
software, perlu pengecekan lebih lanjut untuk validasinya o Data LIDAR sangat menentukan kualitas model bangunan. Semakin
besar ppm maka akan seakin baik dalam mendeskripsikan objek • Mencoba parameter yang pas untuk menghasilkan edge detection yang pas
Dr. Ing. Ir. Teguh Hariyanto, M.Sc. (Institut Teknologi Sepuluh Nopember) :
• Computer vision bisa mengekstrak dengan berbagai macam metode ekstraksi: edge, texture, disparity, color, region, motion, dll
• Jawaban pertanyaan pertama yaitu perlu uji akurasi yang paling tepat dengan meningkatkan ppm LIDAR
o Gunakan contoh data lalu dicarikan kesamaan datanya, dalam remote
sensing → menentukan class sample o Jika semakin lengkap class sample yang digunakan semakin lengkap,
maka diharapkan minimal 80% objek terklasifikasikan o Tidak perlu pemikiran bahwa harus 100% terdeteksi
• Dalam hal ini bagaimana metode ini bisa diterapkan pada bidang yang lebih khusus yaitu data pemetaan
• Uji akurasi geometri yang paling tepat, tergantung pada berapa ppm yang digunakan, mungkin 4 atau 8 ppm , bisa juga dilakukan pembanding ketika menggunakan 4 atau 8 ppm
• Semakin lengkap klas yang dipakai sebagai contoh maka akan didapat hasil yang mendekati kenyataan yang ada
• Untuk pertanyaan kedua: yang mau difilter itu kelas berapa? Filtering menggunakan intensitas LiDAR, bahwa yang mau dikelaskan pada intensitas berapa, tidak harus semuanya
• Awal harus filtering dahulu, misalnya media filter, high pass filter, low pass filter
Budhy Soeksmantono, S.T., M.T. (Institut Teknologi Bandung) :
• Pernah mencoba menggunakan data tahun 2013 • Mengkelaskan 3 jenis kelompok bangunan, ada data driven dan model drivel,
yaitu bangunan besar bentuknya sederhana, medium size lebih rapat, dan ketiga antar atap berhimpit
• Menggunakan terrasolid tidak ada masalah bentuknya dapat terbentuk dengan baik
• Yang bermasalah adalah yang rapat sekali mayoritas tidak sesuai dengan bentuknya

50
• Untuk pertanyaan pertama: dengan melakukan uji menggunakan 2 – 3 ppm, dengan beberapa sample, RMSnya masih > 0,5 m. Jika ingin sangat precise memang masih membutuhkan uji lapangan
• Untuk pertanyaan kedua: 3D building model dibagi filtering & klasifikasi → mengacu pada algortima tt → slopebased, morphological. → Data LIDAR only
• Yang kedua roof plannar segmen detection, bagaimana atapnya, ada metodenya LANSAC yang populer digunakan
• Line edge detection, lebih realistis karena data garis cukup banyak, datanya cukup rapat sehingga bentuknya akan semakin bagus
• Perlu diingat karakteristik bangunan di luar negri dengan indonesia cukup berbeda, di luar negeri sudah ada beberapa tipe model bangunan
• Untuk Indonesia agak susah memodelkan bangunan dikarenakan kondisi lapangannya.
• Perlu diperhatikan juga tujuannya mau mengidentifikasi di 2 dimensi atau 3 dimensi
• Bisa menggunakan data raster • Namun untuk menghilangkan garis meliuk → poin jadi line → jadi wireframe
untuk membantu objek detection di orthophoto sehingga batas jadi lurus.. Rege2 terjadi karena pixel stretching karena perbedaan ketinggian dijarak yang pendek.
• LOD atau akurasi mau dilihat yang mana • Filtering untuk intensity memungkinkan namun panjang spectral reflectan
akan membedakan satu objek dengan objek lain terutama untuk daerah tropis banyak pohon akan tidak tegas
• Ppm sangat menentukan semakin rapat maka semakin baik, dalam metoda apapun, minimal 7 ppm (luar negeri), jadi sebaik nya lebih besar ppm yang digunakan (apalagi Indonesia).
• Ada beberapa review terkait 3D model rendering bisa dijadikan studi literatur, dibahas kelebihan dan kekurangan masing-masing
• Resolusi ketinggian dari 3D building berapa? o Tergantung dari ppm yang digunakan, namun hasil saat ini sekitar 2m. o Terasolid → ada data free untuk trial namun lokasi diluar negeri
o Akurasi LIDAR → ppm (poin per square meter)
Dr. M. Ivan Fanany (Universitas Indonesia) :
• UI pernah bekerjasama dengan Bank Indonesia melakukan kajian potensi pemanfaatan data geospasial menggunakan teknologi remote sensing
• Hal ini merupakan permintaan dewan gubernur untuk bisa melihat tingkat pertumbuhan infrastruktur di indonesia
• Salah satunya menggunakan LiDAR, dari USGS, namun resolusi ketinggian 60 meter, ada yang berbayar dari Kanada dan data airboune
• Karena sulitnya memperoleh data, sehingga waktu itu menggunakan gabungan data google earth, google maps, osm, peta bpn, dan provider lainnya, dimerged dalam satu sistem Big data platform, dibangun machine learning berdasarkan data-data tersebut

51
• Berdasarkan itu bisa juga melihat beberapa indikator ekonomi • Masukan dari segi image resolusi spasial, spektral, frekuensi update • Contoh kajian di katamaran indah, tahun 2003 pembangunan property belum
ada sedangkan 2017 sudah banyak, dari sini dapat dilihat perkembangan berapa persen yang terbangun
• Jenis tutupan lahan yang digunakan 9 kelas: Air, Beton, gedung, RUmput, Tanah, Perumahan, Industri,Jalan,Pohon
• Permodelan 2 dimensi, menggunakan geospasial analytic → remote sensing → image classification →
• Untuk anotasi akurat menggunakan data BPN, anotasi dapat dilakukan secara otomatis dari data tersebut
• Kemudian menggunakan deep learning → DeepSAT model (menggunakan national agriculture imagery program US goverment)→ data preparation (google earth) → evaluation → analytics
• Hasilnya bisa memprediksi tutupan lahan per pixel menggunakan deep learning, bisa dilihat perubahan progress bangunan per tahun dan dilihat perubahan persentase tutupan lahannya
• Apabila bekerja dengan citra banyak perbedaan, sehingga hasilnya juga beda, sehingga dikembangkan metode sendiri menggunakan histogram matching
• Sejauh ini melihat pertumbuhan properti secara horizontal, belum bisa 3 dimensi menggunakan LiDAR
• Kita sudah punya cara normalisasi menghilangkan awan secara otomatis • Remote sensing saat ini banyak menggunakan machine learning, contohnya
dalam menghilangkan awan
Dr. Ade Komara Mulyana (Kepala Bidang Pemetaan Rupabumi Skala Besar) :
• Metode dievaluasi, perlu ada data pembanding, mau 2 dimensi atau 3 dimensi • Kalau 2 dimensi diperlukan jumlah luas bangunan di sebuah lokasi • Kalau 3d perlu ditambah tinggi, total heights di zona itu
Dr. Harintaka, ST., MT. (Universitas Gadjah Mada) :
• Metodenya Li dapat digunakan dalam konteks kondisi ideal, point cloud sudah akurat, LIDAR match dengan orthophoto
• Selain itu, foto udaranya harus sudah true ortho, area juga homogen dan tidak begitu luas
• Perlu dibandingkan kondisi indonesia dengan data yang biasanya • Terdapat proses terpisah antara LIDAR dan Photo nya
• Dua pendekatan yang dilakukan memproses di LiDARnya sendiri kemudian di fotonya
• Di LiDAR memisahkan ground dengan building kemudian pointcloud di dinding dieliminasi, kemudian yang atap
• Dari foto udara, didetect kemudian dimatchingkan agar fitur bangunannya terekstrak
52
• Metode ini belum full automatic • Kondisi data BIG di Indonesia, masih banyak ditemukan problem akurasi point
cloud dengan photo belum match, selain iu Orthonya adalah ground yang ada • Apabila standar RBI geodatabase diturunkan banyak sekali, apakah akan
dibatasi untuk tema building saja • Untuk membawa kondisi data yang ada, masih banyak langkah yang harus
dilakukan • Pertannyaan nomor satu bisa dilakukan interactive validasi dengan hasil
deliniasi (on screen digitation) atau stereoploting interactive
Sofan Prihadi, S.T. (APSPIG) :
• Untuk menjawab pertanyaan nomor 2, contohnya intensitas LiDAR di surabaya
• Gunakan untuk mengecek stereoploting, untuk yang intensitasnya bergerser akan dicek kembali oleh operator
• Di surabaya ppm nya sudah cukup baik yaitu 8-12 ppm, beberapa overlap mencapai 16 ppm
• Ada alat disurabaya yang bisa menghasilkan hingga 30 PPM.
• Di kota terpadat, ada sampai 12 juta bangunan • Data 2 dimensi diambil dari intesive image • Titik ketinggian mencoba algoritma, dari sejumlah titik yang ada di poligon,
diambil yang terendah, asumsinya atap, cukup tepat kecuali ada gangguan pohon dsb
Drs. Projo Danoedoro, M.Sc., Ph.D. (Universitas Gadjah Mada) :
• Berdasarkan apa yang didiskusikan, perlu pemaknaan isi • Untuk klasifikasi objek sampai ke edge detection belum memadai, masih ada
gap yang perlu diisi • Banyak persoalan terkait kualitas data spasial, kualitas geometrik, data
dimodelkan adal persoalan tidak mutually exclusif • masalah geometri sangat penting agar bisa melangkah lebih jauh
Diskusi Sesi II :
Fahrul Hidayat :
• Metode Deep Convolution Neural Network Marmanis et al ini merupakan bagian dari ISPRS tahun 2018
• ISPRS khususnya Commission III – Photogrammetric Computer Vision and Image Analysis pada 2013 menyelenggarakan “ISPRS Test Project on Urban
Classification and 3D Building Reconstruction” (Rottensteiner, 2013)
53
• sampel data yang digunakan ada 2, disortir berdasarkan nilai akurasi tertinggi, tertingginya ada di 96,5% akurasi
• Metode yang dilakukan: o Data (2D Semantic Labeling - Vaihingen data o Inti Model
▪ Building Blocks of Model
• HED·H boundary-detection network developoing from
HED by Xie and Tu (2015); Kokkinos (2016) source: Marmanis et al., 2018
• SEG·ּH encoder-decoder network developing from SegNet
by Badrianarayanan et al. (2017) source: Marmanis et al., 2018
• FCN·H semantic segmentation network developing from
FCN by Long et al. (2015) source: Marmanis et al., 2018 ▪ Integrated class boundary detection and segmentation ▪ Ensemble learning ▪ Result
• Dari tahun 2010 -2015 yang dikembangkan adalah machine learning dan deep learning
• marmanis menggunakan metode deep learning di mana data digunakan agar mesin dapat mempelajari dan menguji data
• metode ini dikembangkan dari beberapa model yang sudah ada, pemngembangan dari edge detection
• kekurangan metode ini adalah membutuhkan komputer yang mumpuni dengan GPU hardware untuk mengakselerasikan proses serta memerlukan banyak training and test data
Dr. Ing. Ir. Teguh Hariyanto, M.Sc. (Institut Teknologi Sepuluh Nopember) :
• Model marmanis ini sudah banyak dilakukan di tahun 1990 • Ada beberapa ketentuan, misalnya membagi area menjadi 3 bagian yaitu
urban, semi urban dan rural • Training area yang dibutuhkan berbeda2 tergantung kompleksitas dan detil
yang akan dipetakan
• Pada saat itu, belum dapat didefinisikan berapa PPM data yang digunakan
• Kedua mengenai keseragaman radiometriknya, apabila untuk level eropa dengan cuaca yang sama tingkat penyinarannya cukup baik hasilny akan lebih baik
• Berbeda dengan data dari Indonesia yang pada saat dibawa dengan perbedaan 15 menit sangat menunjukkan perbedaan sehingga membutuhkan filtering.
• Perlu dicari filter yang dapat menyamakan • Harus dicari training sampel yang seteliti mungkin • Pemetaan itu minimal kesalahan adalah 10%, Jika 90% terinterpretasi dengan
baik maka sudah baik.
54
• Komputer yang dibutuhkan untuk metode Marmanis harus komputer canggih, namun karena Indonesia banyak semi urban dan rural, mungkin dengan
computer biasa bisa dilakukan.
Dr. M. Ivan Fanany (Universitas Indonesia) :
• Perlu ditentukan tujuan, perlu 2D atau 3D • Terkait fasilitas untuk di fasilkom ui telah dibangun 7 server yang dibuat
cluster dan bisa dibuat kerja bersama • Untuk bisa mengolah data ini, bisa menggunakan laptop 980, bisa juga
menggunakan desktop • Tekniknya dengan dikecilkan mini bytes • Contoh data sekarang computer vision, sekali load ke gpu memakan hampir 4
gb • Menggunakan matlab untuk deeplearning sudah cukup banyak, namun belum
bisa untuk cluster dan cukup berat • Caffe dan Pytorch sudah bisa untuk deep learning
Drs. Projo Danoedoro, M.Sc., Ph.D. (Universitas Gadjah Mada) :
• Paper- paper yang dirujuk kebanyakan paper luar dimana memunculkan karakteristik yang beda dengan Indonesia. Contoh pohon diluar tidak ada atau jarang yang menaungi rumah, namun di Indonesia hal tersebut tidak terhindarkan.
• Konsistensi radiometrik antar scene berbeda juga menjadi masalah yakni kekacauan identifikasi boundary.
• Akan lebih baik, penelitian ini bersifat ujicoba terhadap scene berbeda.
• Efek bayangan sangat mengganggu.
• Coba dilihat contoh-contoh citra yang ada di sini, • Di negara maju jarak antar bangunan cukup jauh sehingga indiveidual building
dapat diidentifikasi • Selain itu pohon tidak menaungi bangunan • Metode Marmanis ini teruji di negara maju, namun untuk negara berkembang
perlu diuji lebih lanjut • Kelemahan kendala multi scene, konsistensi radiometriknya sulit sehingga
harus dikalibrasi • akan lebih baik diuji coba dan fokus pada area yang bertampalan dan
perekaman yang berbeda-beda • untuk penyinaran terdapat gangguan dari bayangan
Dr. Ade Komara Mulyana (Kepala Bidang Pemetaan Rupabumi Skala Besar) :
• Dengan metode yang Convolution neural network (CNN), kebanyakan menggunakan deep learning
55
Diskusi Sesi III :
M. Irwan Hariyono
• Metode selanjutnya dari Mohammad Awrangjeb, et al terkait Automatic extraction of building roof plane from lidar point cloud data using data driven approach
• Data mentah LiDAR, foto udara, & point plot ditampilkan sebagai point berketinggian (titik tertinggi objek). Kemudian dilakukan clustering/klasifikasi berdasarkan coplanarity of points. Setelah itu dilakukan identifikasi masing2 objek bangunan, dengan menghilangkan objek tumbuhan kecil. Hingga dihasilkan point-point yang membentuk objek bangunan.
• Metode ini dipisahkan antara ground dan non ground • Awrangjeb menyediakan software yang bisa kita gunakan • Pada proses Extraction, akan dilakukan pendekatan refinement of planar
segments pada hasil detection, hingga hanya objek dengan poligon bersegi yang dihasilkan (poligon pohon yang acak akan hilang).
Dr. M. Ivan Fanany (Universitas Indonesia) :
• Dilihat clusternya apa, top down atau bottom up, yang akan menentukan clusternya
• Kelemahannya bagaimana membedakan atap dengan pohon • Proses pembedaan objek memang harusnya semi automatis karena tidak bisa
mengandalkan hasil software, tetap ada peran manusia untuk menghasilkan data yang baik
• Dulu pernah Toyota diminta membuat recognition, punya kecepatan akuisisi 100ribu titik/second, bisa melakukan recognition mana itu jalan, pedestrian atau sepeda, dsb
• Ada open source Point cloud library, dari sini bisa dimanfaatkan dan sepetinya aplicable untuk data LiDAR
• Dari segmentation bisa gunakan machine learning, vectorize, 3D point kemudian classification
• Pada tahun 2019 toyota akan membuat teknologi driverless car yang dapat mendeteksi dalam 200milisecond
Sofan Prihadi, S.T. (APSPIG) :
• Untuk membedakan atap dengan pohon bisa dilihat dari pendekatannya morfologicalnya, dilihat dari x dan y nya
• Di Surabaya dilihat dengan stereoplotting masih membingungkan karena sangat menumpuk, padahal ppmnya sudah cukup tinggi
• Minimal gunakan 12 ppm LIDAR
• Saat ini sudah ada perusahaan yang punya alat yg mampu menghasilkan 25-30 ppm

56
Budhy Soeksmantono, S.T., M.T. (Institut Teknologi Bandung) :
• Klasifikasi berdasarkan ketinggian, dan bentuknya • Untuk membedakan atap dengan pohon dari software membuat Asumsi mana
yang plain berdasarkan surface, kalau pohon bentuknya tidak beraturan dan dia berlapis
• Untuk metode ini, cocok untuk kasus yang lebih spesifik • Hasil literatur review perlu dicoba dan dipilih yang hasilnya paling bagus • Usulan: setelah direview coba diimplemetasi, benchmarkingnya coba
menggunakan terrasolid datanya sudah cukup baik • Gunakan contoh paper dengan kasus lebih spesifik, dengan data yang lebih
heterogen
• Dari cara otomatis, semi otomatis, dan manual mana lebih baik ?
Prof. Fahmi Amhar :
• Salah stau cara mengecek algoritma dari suatu metode adalah dengan mengcreate data terlebih dahulu, untuk melihat apakah cocok atau tidak, karena apabila data nyata terlalu banyak
• Automatic image, sensitif pada inakurasi, di indonesia agak lebar • Tindak lanjut dari FGD ini data akan coba dirunning
Dr. Ing. Ir. Teguh Hariyanto, M.Sc. (Institut Teknologi Sepuluh Nopember) :
• Metode ini masih semi automatis, masih harus mengandalkan peran operator untuk merapihkan
• Contoh yang bagus adalah, dengan data yang penuh (diseluruh sisi orthophoto) terseleksi seluruh objek
• Untuk skala besar akan terjadi satu objek ditutupi objek lainnya, apalagi foto udara sangat dipengaruhi posisi matahari
• Bisa membuktikan bahwa sampai kepadatan apapun ini masih bisa baru kemudian dicari contoh yang heterogen, seperti vegetasi dsb
• Data real yang ada di BIG seperti apa, kecepatannya seperti apa, • Semi analitis sudah cukup baik, bisa mempercepat proses orientasi relatif dan
absolut • Apabila BIG sudah punya sofware, apakah tidak dilengkapi extension untuk
memasukan perintah untuk model yang ada • Untuk penelitian ini perlu roadmap, kualifikasi jangka pendek, menengah dan
panjang, • Jangka pendek apa saja yang harus dilakukan
Dr. Harintaka, ST., MT. (Universitas Gadjah Mada) :
• Berdasarkan 3 metode yang dapat disimpulkan antara lain:
57
o Metode Li akan optimum untuk data LiDAR dan ortho photo o Metode Marmanis akan cocok untuk data foto udara o Metode Awrangjeb paling fit menggunakan data LiDAR o Utk no.3 → tidak bisa memproses data besar o Utk no.1 → complicated karena mengandalkan kualitas data LIDAR,
terutama pada membentuk geometriknya. Lee oke untuk yang teratur namun perlu dicoba untuk data BIG (Indonesia)
• Dari segmentasi bisa gunakan machine learning, vectorize, 3D point classification
• Sekarang tinggal diarahkan dengan case yang paling banyak ditemui • Yang lebih dapat diandalkan sepetinya yang pertama • Yang nomor dua problemnya area harusnya objeknya terpisah, dan tidak
memproses data yg banyak, case studinya kecil • Arah penelitian ini apakah langsung practical (bisa diimplementasikan di pprt)
atau hanya untuk ekstrasi fitur tertentu saja • Karena apabila melihat data yang ada di BIG akan sangat kompleks
Drs. Projo Danoedoro, M.Sc., Ph.D. (Universitas Gadjah Mada) :
• Kekurangan metode ini sepertinya tidak bisa mendeteksi bayangan dari bangunan. Terdapat bangunan kecil yang sebagian tertutup oleh bayangan hanya terdeteksi sebagian, tidak utuh
Budhy Soeksmantono, S.T., M.T. (Institut Teknologi Bandung) :
• Usul : benchmarking pakai software TeraSolid; Ikuti trainingnya dan nanti bisa dapat lisensi dan data.
Dr. Ade Komara Mulyana (Kepala Bidang Pemetaan Rupabumi Skala Besar) :
• Untuk tahap awal yang paling mudah → building • Jika bisa menghasilkan polygon yang baik dan benar secara geometris dan
tidak bergerigi → sudah sangat baik • Coba benchmarking dengan terasolid → mana yang lebih baik (sesuai arahan
Pak Harintaka)
58
Notulis,
Ellen Suryanegara Aninda Rudiastuti
Dokumentasi Kegiatan
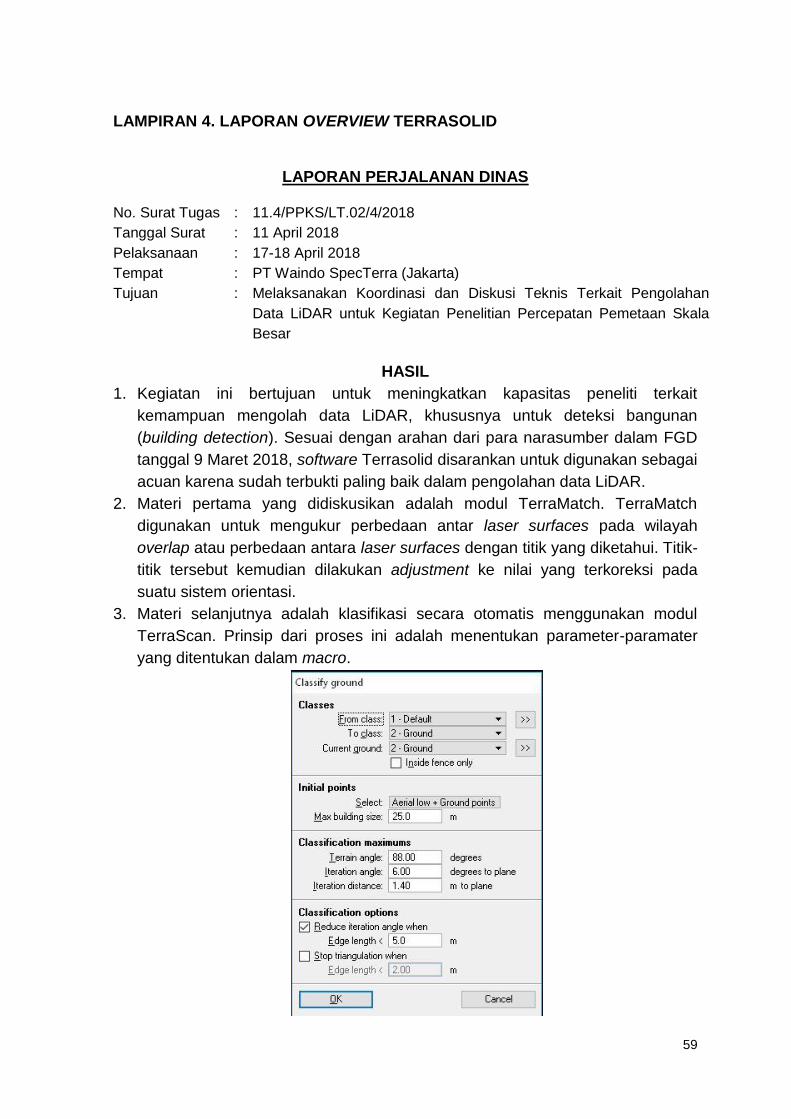
59
LAMPIRAN 4. LAPORAN OVERVIEW TERRASOLID
LAPORAN PERJALANAN DINAS No. Surat Tugas : 11.4/PPKS/LT.02/4/2018
Tanggal Surat : 11 April 2018
Pelaksanaan : 17-18 April 2018
Tempat : PT Waindo SpecTerra (Jakarta)
Tujuan : Melaksanakan Koordinasi dan Diskusi Teknis Terkait Pengolahan
Data LiDAR untuk Kegiatan Penelitian Percepatan Pemetaan Skala
Besar
HASIL
1. Kegiatan ini bertujuan untuk meningkatkan kapasitas peneliti terkait
kemampuan mengolah data LiDAR, khususnya untuk deteksi bangunan
(building detection). Sesuai dengan arahan dari para narasumber dalam FGD
tanggal 9 Maret 2018, software Terrasolid disarankan untuk digunakan sebagai
acuan karena sudah terbukti paling baik dalam pengolahan data LiDAR.
2. Materi pertama yang didiskusikan adalah modul TerraMatch. TerraMatch
digunakan untuk mengukur perbedaan antar laser surfaces pada wilayah
overlap atau perbedaan antara laser surfaces dengan titik yang diketahui. Titik-
titik tersebut kemudian dilakukan adjustment ke nilai yang terkoreksi pada
suatu sistem orientasi.
3. Materi selanjutnya adalah klasifikasi secara otomatis menggunakan modul
TerraScan. Prinsip dari proses ini adalah menentukan parameter-paramater
yang ditentukan dalam macro.

60
4. Selanjutnya didiskusikan pula klasifikasi secara manual. Prinsip dari metode ini
adalah dengan melakukan editing secara otomatis dengan acuan foto udara
dan model elevasi yang dibentuk, sehingga klasifikasi sesuai dengan referensi
yang digunakan.
5. Terakhir, didiskusikan materi yang paling dibutuhkan dari peneliti, yaitu
klasifikasi bangunan dan vegetasi secara otomatis. Prinsip dari proses ini
adalah dengan menggunakan acuan ketinggian (height).
Dokumentasi kegiatan:
Demikian laporan kami sampaikan, terima kasih atas kesempatan yang telah
diberikan.
Pembuat Laporan,
Danang Budi Susetyo
NIP. 199004232014021001
…………………..

61
LAMPIRAN 5. LAPORAN WORKSHOP PENGOLAHAN LIDAR
LAPORAN PELAKSANAAN KEGIATAN WORKSHOP PENGOLAHAN DATA LIDAR
No. Surat Tugas : 27.2/PPKS/LT.03/04/2018
Tanggal Surat : 27 April 2018
Pelaksanaan : 30 April-4 Mei 2018
Tempat : The Sahira Hotel, Bogor
Latar Belakang
Bidang Penelitian Badan Informasi Geospasial pada tahun 2018 mempunyai
program kegiatan penelitian percepatan pemetaan skala besar. Fokus dari
penelitian ini adalah ekstraksi fitur bangunan secara otomatis menggunakan
kombinasi data LiDAR dan foto udara. Untuk mencapai tujuan penelitian tersebut,
pemanfaatan data LiDAR yang perlu ditekankan adalah klasifikasi point cloud
untuk mendeteksi bangunan (building detection). Oleh karena itu, kegiatan
workshop yang di dalamnya mendiskusikan klasifikasi data LiDAR dirasa perlu
dilakukan untuk menunjang penelitian ini.
Cakupan workshop meliputi konsep/teori dan praktek. Narasumber yang
diundang untuk memberikan materi terkait konsep/teori adalah akademisi, dengan
materi yang diusulkan adalah fotogrametri dan LiDAR secara umum. Sedangkan
terkait praktek, narasumber yang diundang adalah praktisi dan profesional yang
sudah mempunyai pengalaman di bidang akuisisi dan pengolahan data LiDAR.
Tujuan Workshop
Tujuan dari pelaksanaan workshop adalah untuk peningkatan kapasitas peneliti
terkait pengolahan data LiDAR. Output dari kegiatan ini diharapkan peneliti dapat
melakukan klasifikasi bangunan dari data LiDAR serta pembentukan DTM (Digital
Terrain Model), sesuai dengan target yang ditentukan dari penelitian percepatan
pemetaan skala besar.
Narasumber
Narasumber yang akan diundang dalam workshop adalah:
1. Dr. Harintaka, S.T., M.T. (Universitas Gadjah Mada)
2. Dr. Budhy Soeksmantono, S.T., M.T. (Institut Teknologi Bandung)
3. Praktisi dan profesional di bidang pengolahan data LiDAR
Waktu dan Tempat
Workshop diselenggarakan selama empat hari pada tanggal 30 April-4 Juni 2018
(kecuali 1 Mei karena hari libur) di The Sahira Hotel, Bogor, Jawa Barat.
62
Materi
1. TEORI DAN KONSEP FOTOGRAMETRI
Narasumber: Dr. Harintaka, S.T., M.T.
Waktu: 30 April 2018, pukul 08.00-16.00
Sesi ini bertujuan untuk meningkatkan pemahaman para peneliti yang
terlibat di penelitian percepatan pemetaan skala besar terkait konsep
fotogrametri secara umum. Meski data utama yang digunakan dalam penelitian
ini adalah data LiDAR, materi tentang fotogrametri dirasa perlu karena
merupakan dasar dari segala metode akuisisi data spasial yang menggunakan
teknik penginderaan jauh, seperti airborne laser scanning, terrestrial laser
scanning, hingga UAV.
Materi yang disampaikan oleh narasumber secara garis besar adalah
sebagai berikut:
• Konsep, sensor, dan model matematik pada teknologi fotogrametri
• Prosedur umum pemrosesan foto udara
• Perencanaan dan pemotretan foto udara
• Triangulasi udara dan direct georeferencing
• Ekstraksi data dari foto udara
• Pembentukan DSM/DEM dari foto udara
• Konsep dan pembuatan ortofoto
• Fotogrametri menggunakan wahana UAV
63
2. TEORI DAN KONSEP LIDAR
Narasumber: Dr. Budhy Soeksmantono, S.T., M.T.
Waktu: 2 Mei 2018, pukul 08.00-16.00
Sesi ini fokus pada konsep data LiDAR, sekaligus overview praktek
menggunakan software pengolahan data LiDAR. Melalui sesi ini, diharapkan
peneliti semakin memahami konsep akuisisi data LiDAR sekaligus
pengolahaannya untuk kemudian menjadi data yang siap digunakan untuk
pemetaan.
Materi yang disampaikan oleh narasumber secara garis besar adalah
sebagai berikut:
• Sejarah LiDAR
• Komponen dasar LiDAR
• Mekanisme scanning
• Interaksi dengan target
• Sumber error
• Alur pengolahan data LiDAR
• Georeferencing
• Filtering
• Quality check
• Klasifikasi vegetasi
• Ekstraksi bangunan
• LiDAR vs Fotogrametri
Seperti disebutkan pada paragraf sebelumnya, pada sesi ini juga diberikan
sesi overview praktek menggunakan software pengolahan data LiDAR. Sesi
praktek ini fokus pada ekstraksi model bangunan (building model extraction)
secara otomatis. Materi ini sangat bermanfaat bagi peneliti, karena

64
memberikan gambaran mengenai otomasi yang dapat dilakukan menggunakan
software pengolahan LiDAR yang sudah ada.
3. PRAKTEK PENGOLAHAN DATA LIDAR
Narasumber: Praktisi dan profesional di bidang pengolahan data LiDAR
Waktu: 3-4 Mei 2018, pukul 08.00-16.00
Setelah dua sesi sebelumnya lebih fokus kepada materi, sesi ini fokus pada
aspek praktis. Untuk itu, narasumber yang dipilih adalah praktisi dan
profesional yang sudah terbiasa dalam pengolahan data LiDAR. Tujuan dari
sesi ini adalah peneliti lebih memahami teknik pengolahan data LiDAR secara
langsung, sehingga peneliti dapat melakukan pengolahan data LiDAR untuk
mendukung kegiatan penelitian percepatan pemetaan skala besar.
Sesi ini fokus pada dua hal, yaitu klasifikasi dan filtering point cloud LiDAR
untuk pembentukan DTM serta ekstraksi model bangunan secara otomatis.
Khusus untuk ekstraksi model bangunan secara otomatis, untuk sesi ini
dijelaskan dengan lebih mendetail dibandingkan pada sesi pada hari
sebelumnya. Sesi praktek ini dilaksanakan selama dua hari, dimana pada hari
pertama fokus pada dasar-dasar pengolahan data LiDAR secara umum seperti
klasifikasi otomatis dan manual, sedangkan hari kedua fokus pada
pembentukan DTM dan ekstraksi model bangunan secara otomatis.

65
Demikian laporan kami sampaikan, terima kasih atas kesempatan yang telah
diberikan.
Pembuat Laporan,
Danang Budi Susetyo
NIP. 199004232014021001
…………………..
66
LAMPIRAN 6. LAPORAN KUNJUNGAN KE PERUSAHAAN PEMETAAN
Nomor Surat Tugas : 28.1/PPKS/LT.03/5/2018
Personil yang ditugaskan : 1. M. Irwan Hariyono
2. Lalitya Narieswari
3. Aninda W. Rudiastuti,
4. Ellen Suryanegara
5. Rizka Windiastuti
6. Danang Budi Susetyo
7. Fahrul Hidayat
8. lntan Pujawati
Tujuan : Jakarta
Maksud Perjalanan Dinas : Melaksanakan studi banding dalam rangka penelitian
percepatan pemetaan skala besar dengan
menggunakan data LiDAR
Tanggal Dinas : 30-31 Mei 2018
Transportasi : Angkutan Darat
RINGKASAN KEGIATAN
Studi banding dalam mendukung penelitian percepatan pemetaan skala
besar dilakukan di perusahaan-perusahaan pengguna dan pengolah data LiDAR,
diantaranya adalah PT. Asi Pudjiastuti Geosurvey, Map Tiga Internasional, dan PT
Surtech Internasional.
Hasil pertemuan dengan beberapa staf dari PT. Asi Pudjiastuti Geosurvey:
- Pemaparan oleh M. irwan Hariyono terkait latar belakang penelitian dan
metode dan langkah- langkah yang telah dilaksanakan.
- Pemaparan parameter yang digunakan dalam prosesing LiDAR dengan
terrasolid mengacu pada Rizaldy dan Mayasari (2016). Bagaimanakah
dengan parameter yang diterapkan di PT. APG?
- Parameter Macro → Ground Classification. Hasil dari training dengan PT.
Waindo, untuk nilai yang diinput dalam parameter macro belum bisa
dipastikan ketentuannya, karena masih hasil uji coba.
- PT. APG dulu pernah melakukan klasifikasi bangunan, namun semua
disesuaikan dengan kebutuhan, dikarenakan selama ini hanya sebatas
pemisahan ground dan non-ground.
- Tujuan dari pertemuan ini sharing tentang:
67
a) Apakah PT. APG pernah melakukan vectorisasi data lidar untuk
pemetaan skala besar?
b) Pengalaman PT. APG pernah melakukan ekstraksi data LiDAR untuk
menghasilkan informasi spasial terkait bangunan
c) Bagaimana control kualitas untuk hasil filtering LiDAR yang biasa
digunakan oleh PT. APG?
- Di KAK BIG masih menyebutkan spesifikasi hasil stereokompilasi 3D, jadi
hasil vektorisasi 2D akan ditolak, beda dengan swasta dimana hasil yang
dibutuhkan dalam format 2D. Lebih lanjut, kebutuhan klien (termasuk BIG)
dalam penyediaan data LiDAR masih dalam tahap pemisahan ground dan
non ground.
- Untuk vectorize 3D, PT. APG menggunakan cara manual, dikarenakan
waktu yang dibutuhkan untuk editing lebih banyak jika melakukan ekstraksi
secara otomatis daripada secara manual.
- Jika yang dikejar kecepatan maka metode ekstraksi otomatis (dengan
terrasolid/eCognition/LiDAR Analyst/ HX Map ~ LEICA) dapat digunakan,
namun untuk ketelitian tidak disarankan
- PT. APG pada awalnya pernah mencoba menggunakan metode otomasi
ekstraksi, namun dikarenakan hasilnya belum memenuhi kriteria maka tidak
dilanjutkan/ tidak diulik penggunaannya. Terlebih hasil otomasi masih
dalam format 2D belum 3D
- Disarankan mencoba LiDAR Analyst dan HX MAP
- Pemanfaatan eCognition juga belum optimal dikarenakan banyaknya
model/rules yang disusun.
- eCognition → data yang digunakan LiDAR dan foto RGBN. PT. APG
pernah menggunakan eCognition untuk pemetaan sawit dan pemetaan
penggunaan lahan.
- Probabilitas metode otomasi ekstraksi LiDAR → jika permintaan pemberi
kerja masih 3D maka akan susah dilaksanakan, kecuali jika diminta
menghasilkan 2D. Pun menghasilkan dengan 2D, masih secara manual.
Untuk hasil otomasi ekstraksi LiDAR pun sangat bergantung pada variasi
area (homogen atau heterogen) → mempengaruhi waktu editing

68
- LiDAR untuk hipsografi (kontur, DEM, dll), hidrografi, dan CHM (Canopy
Height Model) untuk pemetaan jenis vegetasi/ jenis hutan
- Klasifikasi sudah dilakukan otomatis (70%) namun tetap difinalisasi oleh
operator (manual).
- Kesulitan yang dihadapi PT. APG, pemisahan rumput dan alang- alang di
area rawa, sehingga membutuhkan cek lapangan.
- Ranah pekerjaan PT. APG selama ini masih di wilayah darat saja.
- eCognition tidak lagi diexplore penggunaannya oleh PT. APG karena dalam
penerapannya memerlukan banyak template, variasi rules dan lainnya.
- Saran:
a) Penelitian Budi Suksmantyo → 3D Smart city dapat meningkatkan
pendapatan PBB
b) Alternative ujicoba software untuk ekstraksi building: dengan ArcGIS
menggunakan tools Regularize Building Footprint
Dokumentasi di PT. Asi Pudjiastuti Geosurvey
Hasil pertemuan dengan beberapa staf di Map Tiga Internasional:
- Software auto feature extraction
- Harus menggunakan data LiDAR yang memiliki kerapatan titiknya
- Sekarang sistem LiDAR berkembang (eliptical/circular swap) bisa menyapu
data di depan, belakang dan di sudut bangunan
- Direkomendasikan oleh PPRT untuk Studi Banding ke Perusahaan
berpengalaman di bidang LiDAR
- Tujuan studi banding dimaksudkan untuk mendapatkan pengalaman
pengolahan data LiDAR
69
- Telah dilakukan beberapa kegiatan terkait dengan penelitian yaitu FGD,
Pelatihan dan Workshop
- Harus ada manual editing dalam proses building extraction (50% manual,
50% otomatis)
- Spesifikasi data LiDAR akan mempengaruhi hasil
- Menurut pengalaman: proses pekerjaan seperti tender, cek kelengkapan,
administrasi dll memakan waktu hingga 50% dari keseluruhan pekerjaan
- Saat ini PT Map Tiga Internasional masih menggunakan Terrasolid
- Dalam SKKNI, belum ada sertifikasi khusus tenaga LiDAR karena masih
dicampur dalam Fotogrametri
- Harusnya ada workshop (minimal sekali dalam satu tahun) seluruh
perusahaan dengan BIG untuk membahas perkembangan teknologi
pemetaan terkini
- Saat ini PT Map Tiga Internasional telah mencoba LiDAR batimetri
kerjasama dengan PU (irigasi dan laut di Kebumen).
- Ada 15 operator LiDAR
Dokumentasi di Map Tiga Internasional
Hasil pertemuan dengan beberapa staf di PT Surtech Internasional:
- PT Surtech mengalami kesulitan Integrasi LiDAR dengan Fotogrametri
karena ada perbedaan trajectory antara AT (Fotogrametri) dengan LiDAR
- FME (Feature Manipulation Engine) salah satu software yang digunakan
oleh salah satu operator senior di PT Surtech
- Tersedia 20 point/meter2 di wilayah Samarinda dengan horizontal swap

70
- DSM, DTM dan Orthophoto menjadi output yang sering diminta oleh Client,
jarang yang minta data vektor
- Untuk klasifikasi ground dan non ground masih menggunakan Terrasolid
Dokumentasi di PT Surtech Internasional
71
LAMPIRAN 7. NOTULENSI FGD 2 (OKTOBER 2018)
Minutes of Meeting
Agenda Koordinasi dan FGD Penelitian Percepatan Pemetaan Skala Besar
Hari, tanggal Selasa, 9 Oktober 2018
Waktu 09.00 s/d selesai
Tempat Institut Teknologi Sepuluh Nopember (ITS), Surabaya
Tujuan FGD: 1. Menyampaikan progres kegiatan ekstraksi fitur bangunan berdasarkan data LiDAR kota
Surabaya, sebagai kegiatan penelitian percepatan pemetaan skala besar. 2. Berharap mendapat masukan dari para narasumber, khususnya terkait parameter yang ideal
untuk pengolahan data LiDAR menggunakan sorfware Terrasolid.
Masukan dari narasumber:
Pak Khomsin: • Sangat disayangkan bahwa proyek pemetaan skala besar di Kota Surabaya, yang termasuk di
dalamnya melakukan akuisisi foto udara dan LiDAR, pada praktiknya data LiDAR hanya
digunakan untuk membuat kontur/DTM saja. Apa yang telah dilakukan pada riset ini sudah berhasil melakukan ekstraksi unsur bangunan dengan cukup baik meski hanya menggunakan
parameter default. Keberhasilan riset ini dapat menjadi pilot project pemanfaatan data yang sudah ada.
• Perlu diperjelas lokasi riset persisnya di mana. • Perlu dilakukan klusterisasi wilayah, misalnya perumahan yang teratur (di Surabaya bagian
timur), gedung-gedung tinggi (di tengah kota), perkampungan padat tidak teratur (di sekitar
Sungai Mas), dsb. Parameter dapat dicoba-coba berdasarkan klusterisasi tersebut. • Pada evaluasi object matching di riset ini, sepertinya hanya berdasarkan luas bangunan. Perlu
dievaluasi juga berdasarkan posisi obyek, dicek pergeseran obyek dari data referensi yang digunakan (asumsi: proses digitasi ketika membangun referensi tsb benar).
• Ke depan BIG harus mulai memanfaatkan data LiDAR untuk pembangunan 3D city model. Meski
demikian, otomasi data LiDAR untuk menggantikan proses stereo plotting (digitasi) masih perlu dikaji lebih lanjut terkait akurasinya.
• Hasil ekstraksi building perlu dicoba untuk dibandingkan koordinatnya dengan koordinat riil lapangan atau data mapping yang sudah ada, apakah ada pergeseran meskipun secara
geometri bentuknya sama (uji akurasi point to point). • Perlu dicek juga pergeserannya, luasan mungkin sama tapi posisinya bisa bergeser. Untuk data
referensi yang lebih akurat bisa melakukan digitasi sendiri.
Pak Nur Cahyadi:
• Untuk perbaikan parameter perlu dicoba menambahkan ketinggian bangunan • Apabila ada mahasiswa Geomatika ITS yang akan tugas akhir terkait data LiDAR, bisa
bekerjasama dengan peneliti BIG.
• Hasil kajian yang dilakukan oleh Li at all. Itu menggunakan data dengan tipe bangunan yang teratur.
• Perlu dilakukan uji coba pada area urban.
Pak Teguh:
• Menyampaikan paparan tentang laporan hasil proyek pemetaan Kota Surabaya. • Bobot terbesar dari proyek pemetaan tersebut adalah akuisisi data foto udara & LiDAR (sekitar
46%), disusul dengan proses stereo plotting (sekitar 16%) dan SKL (sekitar 14%). • Akuisisi FU dan LiDAR dilakukan secara bersamaan.

72
• Kamera yang digunakan format kecil (4x5 cm). Tahun 2002 pernah ada pemotretan udara
dengan skala yang sama, kamera yang digunakan ukuran 23x23 cm.
• Jumlah NLP keseluruhan 1642 NLP • Tinggi terbang + 700 meter, konstan karena datarannya relatif datar (dataran paling tinggi
hanya 50 meter). • Surabaya sebagian besar persilnya tidak beraturan.
• Masukan penelitian: 1. Koordinatnya diabsolutkan
2. Objeknya disederhanakan
3. Di LiDAR, bangunan ketelitiannya nomor dua setelah area terbuka. Bisa menjadi terobosan untuk menggantikan stereoplotting, terutama untuk area yang teratur
Dokumentasi Kegiatan
Notulen: Rizka Windiastuti
NIP. 197303211992012001
…………………..
Danang Budi Susetyo
NIP. 199004232014021001
…………………..
M. Irwan Hariyono NIP. 198106182014021001
…………………..
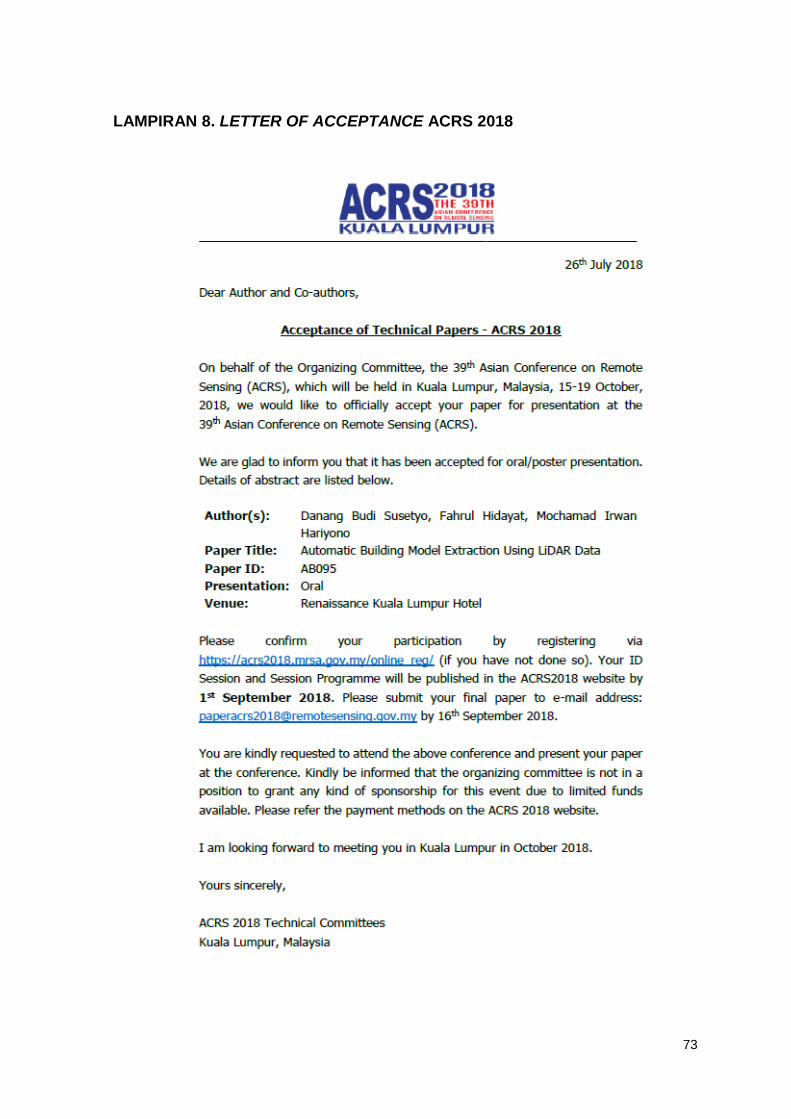
73
LAMPIRAN 8. LETTER OF ACCEPTANCE ACRS 2018

74
75
LAMPIRAN 9. INVITATION LETTER ACRS 2018
76