martikulasi metode matriks plane frame 270820142
DESCRIPTION
matriksTRANSCRIPT

Martikulasi Metode Matrik
Dr. Ir. Mochammad Afifuddin, M.EngJurusan Teknik Sipil Universitas Syiah Kuala
PLANE FRAME
OUTLINE
• Teori Umum untuk Analisa Struktur
untuk Plane Frame dengan Metoda
Matriks
• Contoh-contoh Soal
PLANE FRAME
Analisa Struktur IV
SISTIM KOORDINAT GLOBAL DAN LOKAL
• SISTIM KOORDINAT GLOBAL:
Untuk setiap struktur yang kita tinjau, secara umum hubungan antara beban dan displacement struktur tersebut ditinjau dengan menggunakan sumbu cartesian atau Sistim Koordinat Global.
Sistim koordinat Global di sini adalah koordinat XYZ dengan struktur bidang terletak pada bidang XY.
Posisi dari koordinat XY bebas, tetapi secara umum diletakkan pada sisi kiri yang terbawah.
PLANE FRAME
Martikulasi MTS

SISTIM KOORDINAT GLOBAL DAN LOKAL (lanjutan)
27/08/2014 Matrikulasi Program
MTS Universitas Syiah
Kuala
4
• SISTIM KOORDINAT LOKAL:
Untuk mendapatkan nilai hubungan gaya-
displacement pada masing-masing batang,
maka kita perlu meninjaunya dalam sistim
koordinat lokal.
PLANE FRAME
Martikulasi MTS
DERAJAT KEBEBASAN
27/08/2014 Matrikulasi Program
MTS Universitas Syiah
Kuala
5
• Derajat Kebebasan suatu struktur secara umum dijelaskan sebagai displacement, translasi dan rotasi bebas pada suatu joint yang perlu diidentifikasikan bentuk deformasi dari struktur tersebut ketika menerima beban tertentu.
• NDOF = NCJT(Nj) – NR
Dimana:
NDOF: jumlah derajat kebebasan
NCJT : jumlah derajat kebebasan pada sumbu bebas Plane Frame= 3
NR : jumlah displacement yang terkekang pada support
Nj : jumlah joint
PLANE FRAME
Martikulasi MTS

Number of Restraint
27/08/2014 Matrikulasi Program
MTS Universitas Syiah
Kuala
6
PLANE FRAME
Martikulasi MTS

CONTOH
27/08/2014 Matrikulasi Program
MTS Universitas Syiah
Kuala
7
x 5
y 5
Y
x 2
y 2
x 1
y 1
1
2
3
4
5X
PLANE FRAME
Martikulasi MTS

Y
x 2
y 2
x 1
y 1
x 5
y 5
1
2
3
4
5X
1
23
4
56
7
8
9
10
1112
13 14
15
PLANE FRAME
Martikulasi MTS
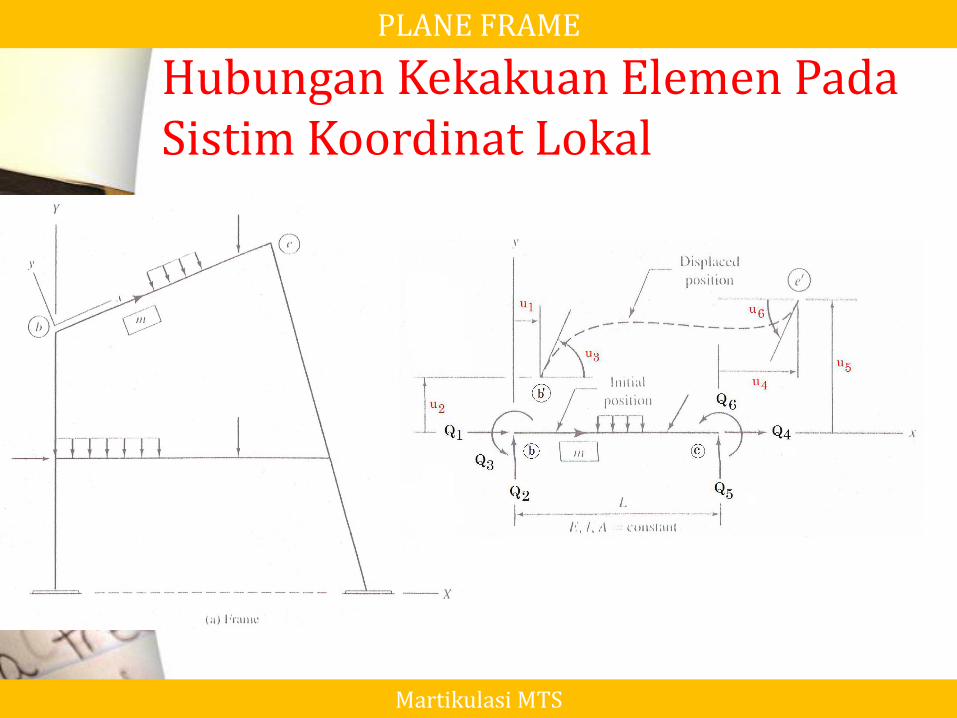
Hubungan Kekakuan Elemen PadaSistim Koordinat Lokal
PLANE FRAME
Martikulasi MTS

PLANE FRAME
Martikulasi MTS
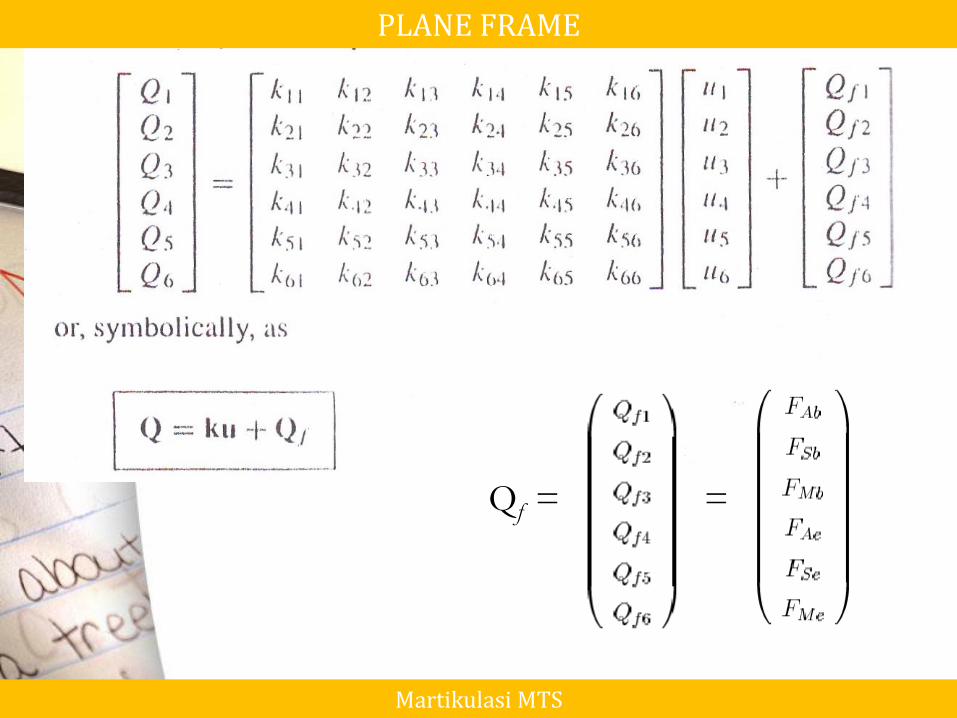
=Qf =
PLANE FRAME
Martikulasi MTS

Kekakuan batang:
k = EI/L3
AL2/I 0 0 -AL2/I 0 0
0 12 6L 0 -12 6L
0 6L 4L2 0 -6L 2L2
-AL2/I 0 0 AL2/I 0 0
0 -12 -6L 0 12 -6L
0 6L 2L2 0 -6L 4L2
PLANE FRAME
Martikulasi MTS
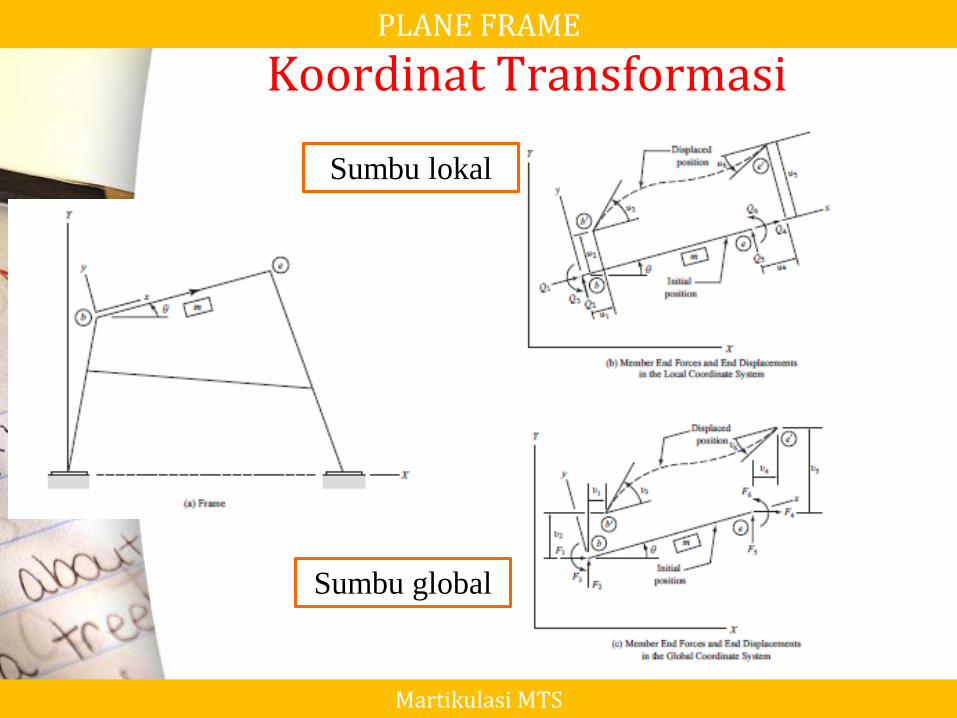
Koordinat TransformasiPLANE FRAME
Martikulasi MTS
Sumbu lokal
Sumbu global

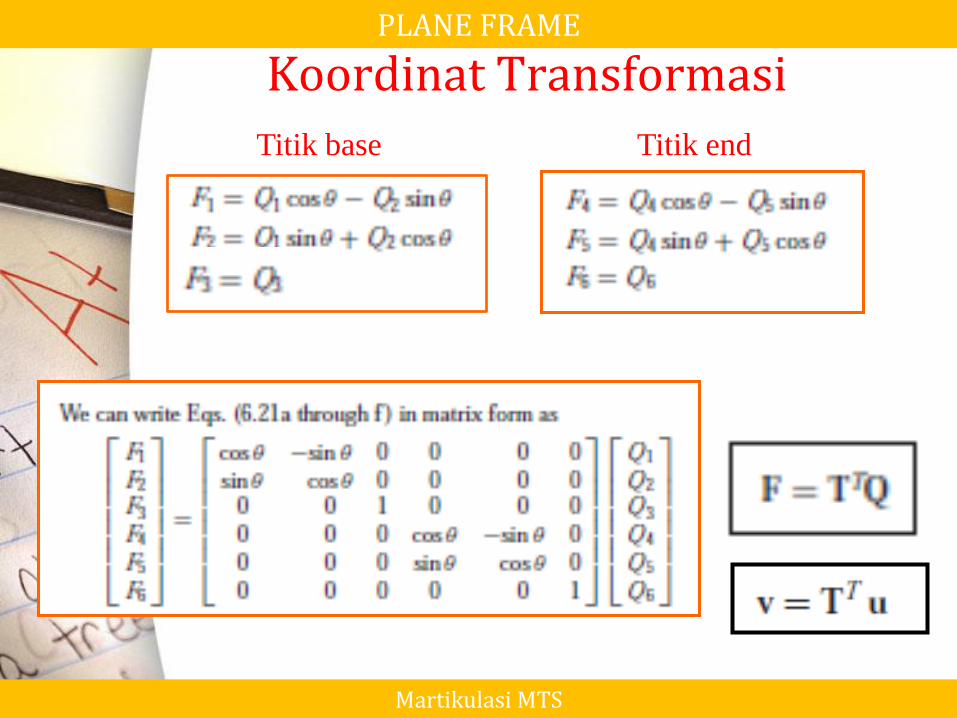
Koordinat TransformasiPLANE FRAME
Martikulasi MTS
Titik base Titik end
Koordinat TransformasiPLANE FRAME
Martikulasi MTS
Titik base Titik end
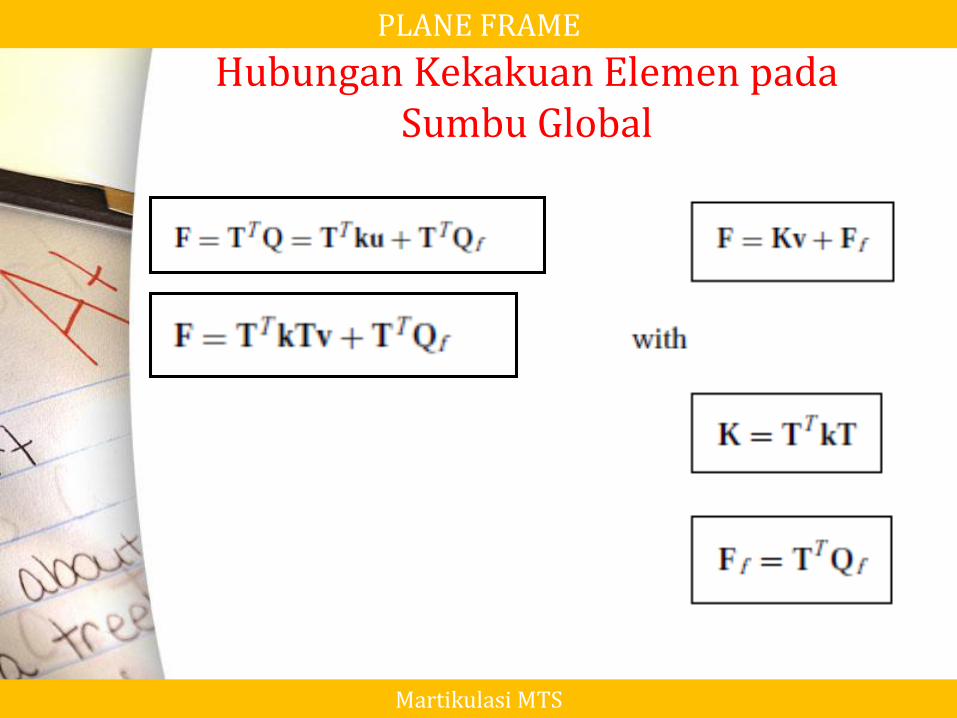
Hubungan Kekakuan Elemen pada Sumbu Global
PLANE FRAME
Martikulasi MTS

Kekakuan pada Sumbu Global
PLANE FRAME
Martikulasi MTS

Vektor Ff pada Sumbu Global
27/08/2014 18
PLANE FRAME
Martikulasi MTS

Vektor Ff pada Sumbu Global
27/08/2014 19
PLANE FRAME
Martikulasi MTS

Hubungan Kekakuan Struktur
PLANE FRAME
Martikulasi MTS

Hubungan Kekakuan Struktur (lanjutan)
27/08/2014 21
PLANE FRAME
Martikulasi MTS
Hubungan Kekakuan Struktur (lanjutan)
27/08/2014 Matrikulasi Program
MTS Universitas Syiah
Kuala
22
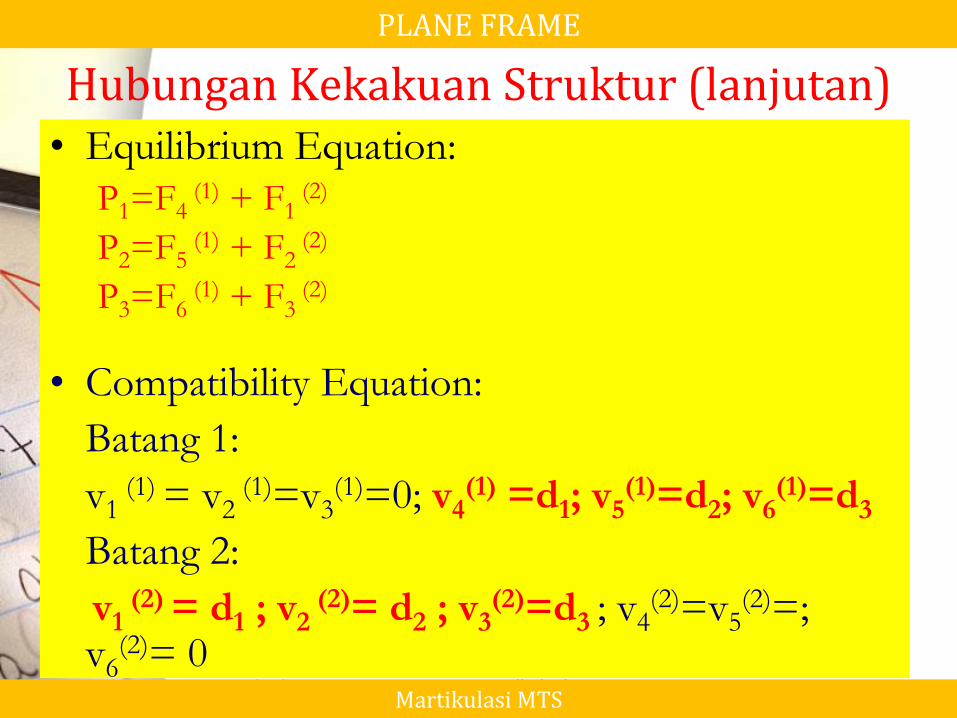
• Equilibrium Equation:
P1=F4 (1) + F1
(2)
P2=F5 (1) + F2
(2)
P3=F6 (1) + F3
(2)
• Compatibility Equation:
Batang 1:
v1 (1) = v2
(1)=v3(1)=0; v4
(1) =d1; v5(1)=d2; v6
(1)=d3
Batang 2:
v1 (2) = d1 ; v2
(2)= d2 ; v3(2)=d3 ; v4
(2)=v5(2)=;
v6(2)= 0
PLANE FRAME
Martikulasi MTS

27/08/2014 23
• F4(1)=K44
(1)d1+K45(1)d2+K46
(1)d3+Ff4 (1)
• F5(1)=K54
(1)d1+K55(1)d2+K56
(1)d3+Ff5 (1)
• F6(1)=K64
(1)d1+K65(1)d2+K66
(1)d3+Ff6 (1)
• F1(2)=K11
(2)d1+K12(2)d2+K13
(2)d3+Ff1 (2)
• F2(2)=K21
(2)d1+K22(2)d2+K23
(2)d3+Ff2 (2)
• F3(2)=K31
(2)d1+K32(2)d2+K33
(2)d3+Ff3 (2)
= +
PLANE FRAME
Martikulasi MTS

• P1=(K44(1)+K11
(2))d1+(K45(1)+K12
(2))d2+(K46 (1)+K13
(2) )d3
+(Ff4 (1) +Ff1
(2))
• P2=(K54(1)+K21
(2))d1+(K55(1)+K22
(2))d2+(K56 (1)+K23
(2) )d3
+(Ff5 (1) +Ff2
(2))
• P3=(K64(1)+K31
(2))d1+(K65(1)+K32
(2))d2+(K66 (11)+K33
(2) )d3
+(Ff6 (1) +Ff3
(2))
PLANE FRAME
Martikulasi MTS
P1=F4 (1) + F1
(2)
P2=F5 (1) + F2
(2)
P3=F6 (1) + F3
(2)

27/08/2014 25
• P = Sd + Pf
• P - Pf = Sd
S =
Pf =
PLANE FRAME
Martikulasi MTS
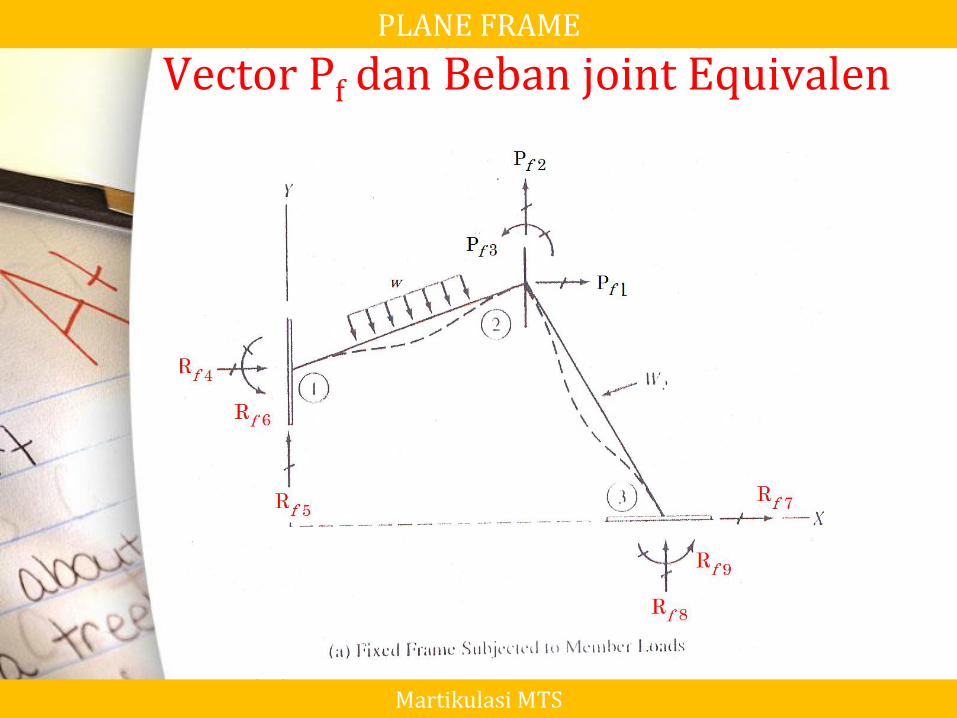
Vector Pf dan Beban joint Equivalen
27/08/2014 26
PLANE FRAME
Martikulasi MTS

PLANE FRAME
Martikulasi MTS
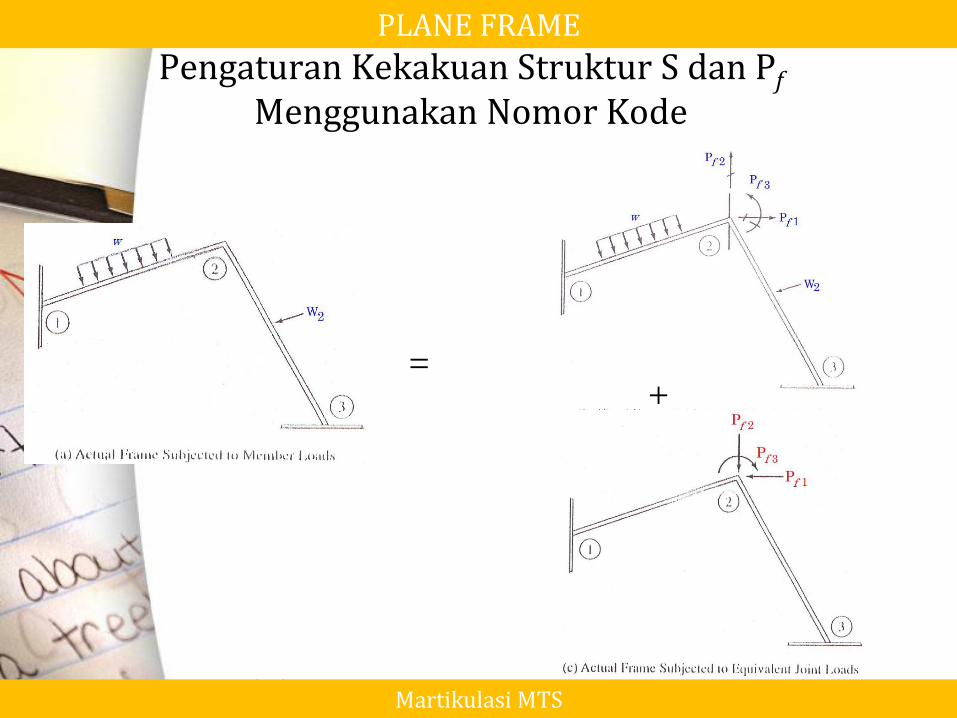
Pengaturan Kekakuan Struktur S dan PfMenggunakan Nomor Kode
27/08/2014 28
=+
PLANE FRAME
Martikulasi MTS
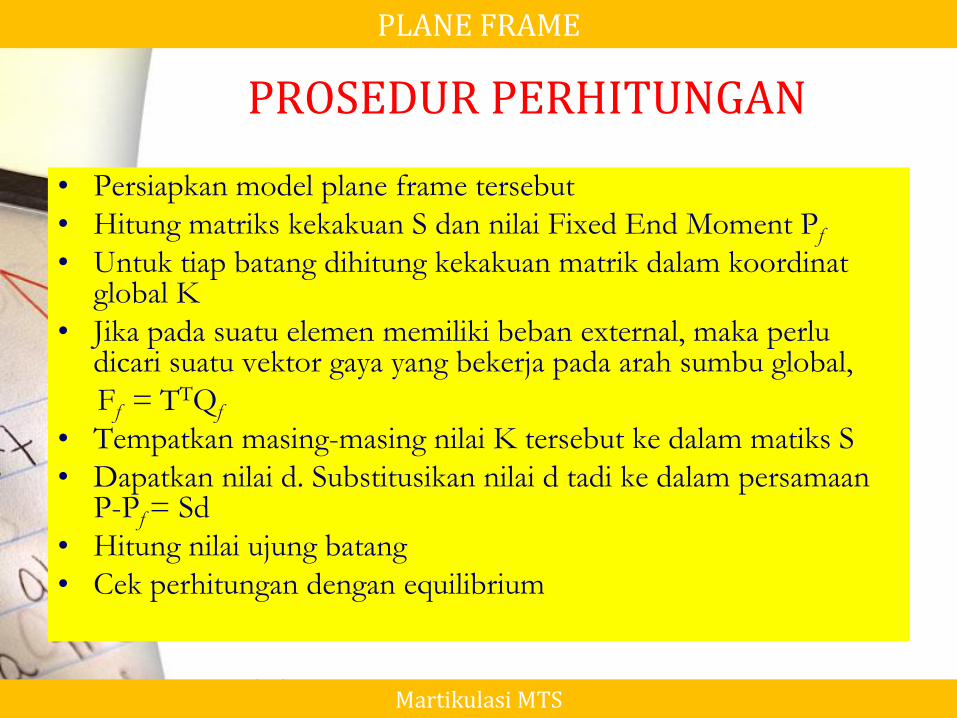
PROSEDUR PERHITUNGAN
27/08/2014 29
• Persiapkan model plane frame tersebut
• Hitung matriks kekakuan S dan nilai Fixed End Moment Pf
• Untuk tiap batang dihitung kekakuan matrik dalam koordinatglobal K
• Jika pada suatu elemen memiliki beban external, maka perludicari suatu vektor gaya yang bekerja pada arah sumbu global,
Ff = TTQf
• Tempatkan masing-masing nilai K tersebut ke dalam matiks S
• Dapatkan nilai d. Substitusikan nilai d tadi ke dalam persamaanP-Pf = Sd
• Hitung nilai ujung batang
• Cek perhitungan dengan equilibrium
PLANE FRAME
Martikulasi MTS
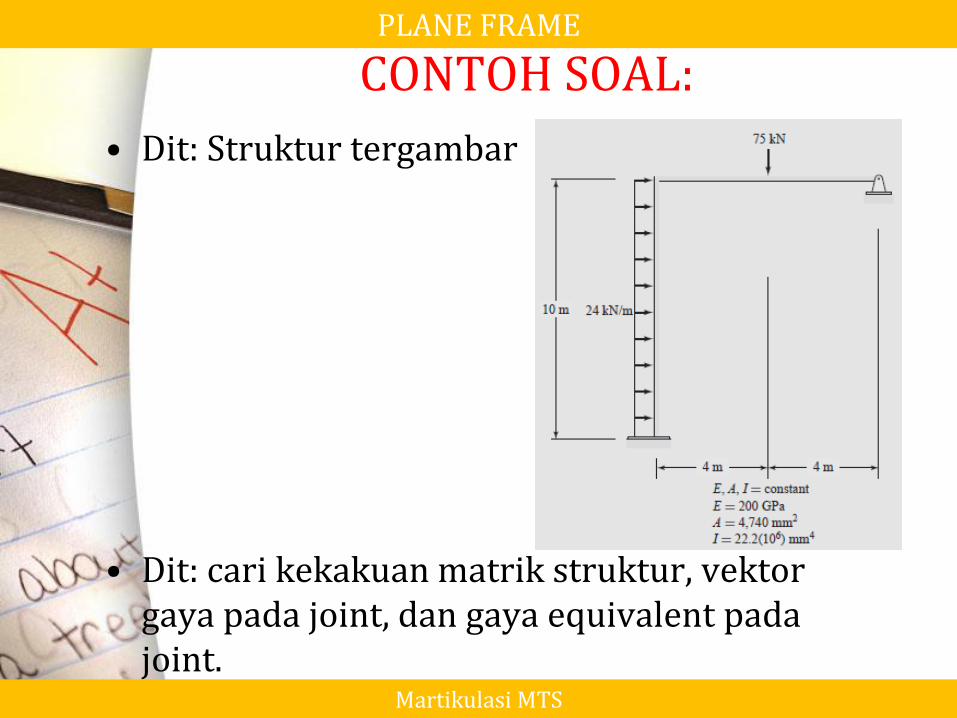
CONTOH SOAL:
• Dit: Struktur tergambar
• Dit: cari kekakuan matrik struktur, vektor gaya pada joint, dan gaya equivalent pada joint.
PLANE FRAME
Martikulasi MTS
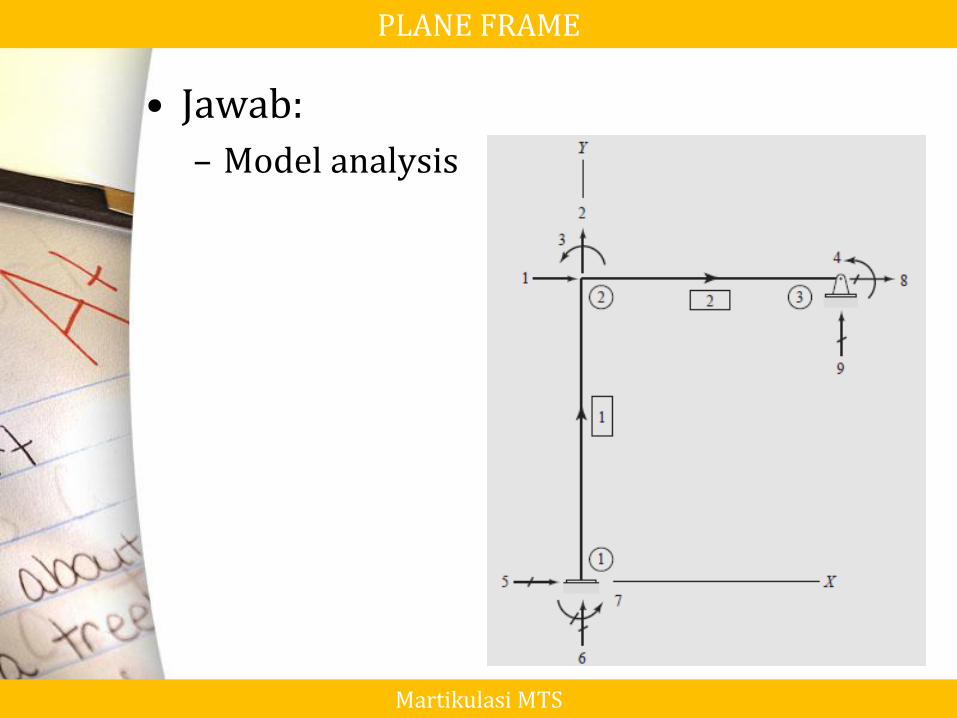
• Jawab:
– Model analysis
PLANE FRAME
Martikulasi MTS

• Jawab:
– Elemen 1
PLANE FRAME
Martikulasi MTS
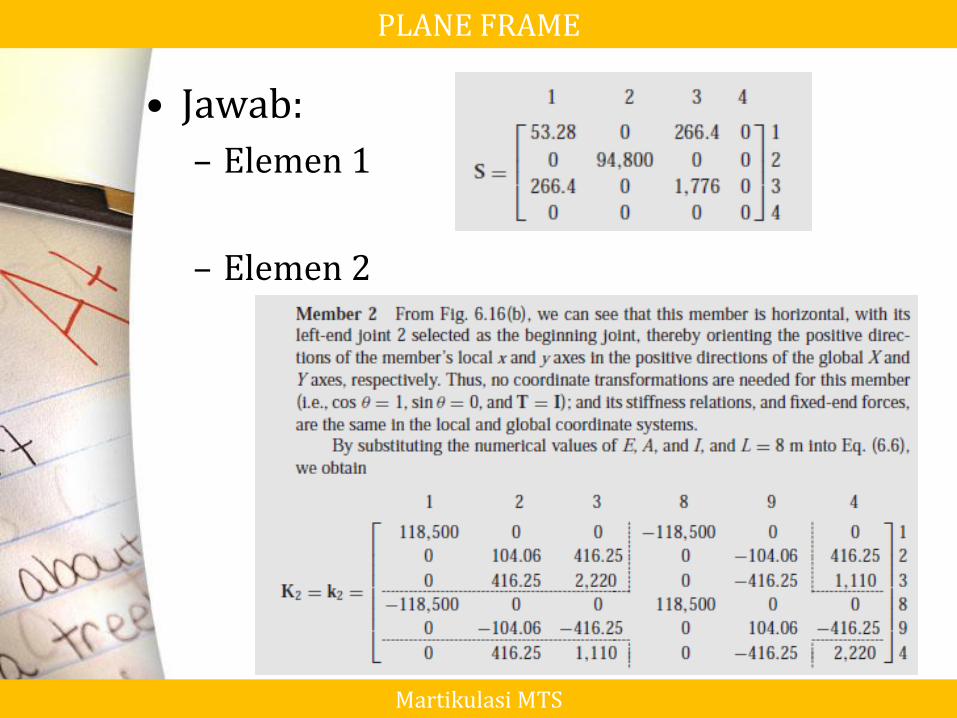
• Jawab:
– Elemen 1
– Elemen 2
PLANE FRAME
Martikulasi MTS
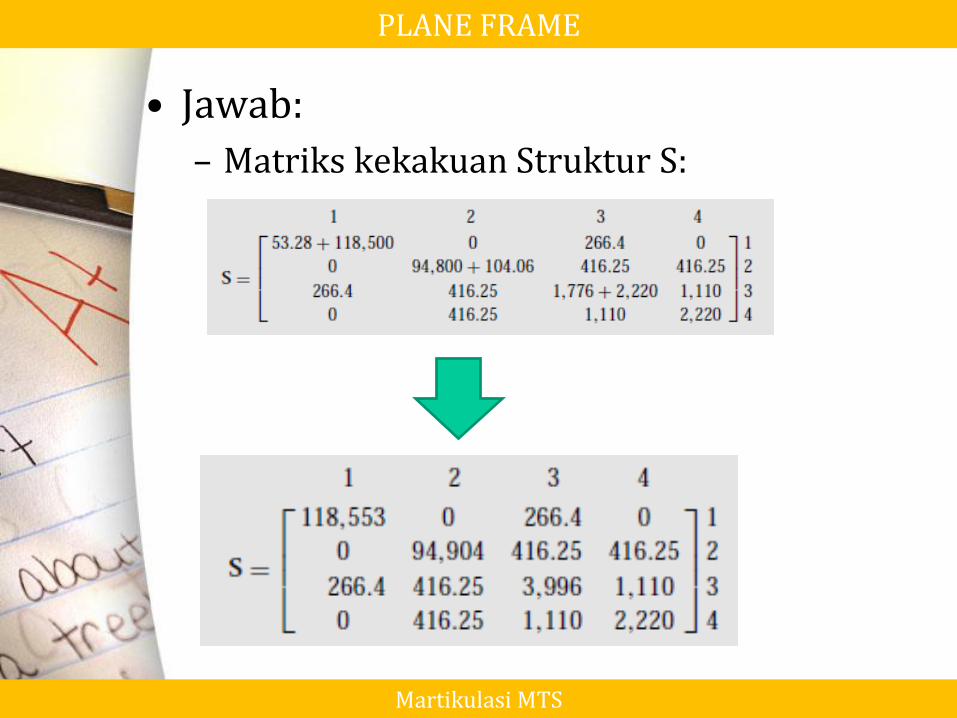
• Jawab:
– Matriks kekakuan Struktur S:
PLANE FRAME
Martikulasi MTS

• Jawab:
PLANE FRAME
Martikulasi MTS

• Jawab:
PLANE FRAME
Martikulasi MTS

• Jawab:
PLANE FRAME
Martikulasi MTS

• Jawab:
PLANE FRAME
Martikulasi MTS
CONTOH SOAL:
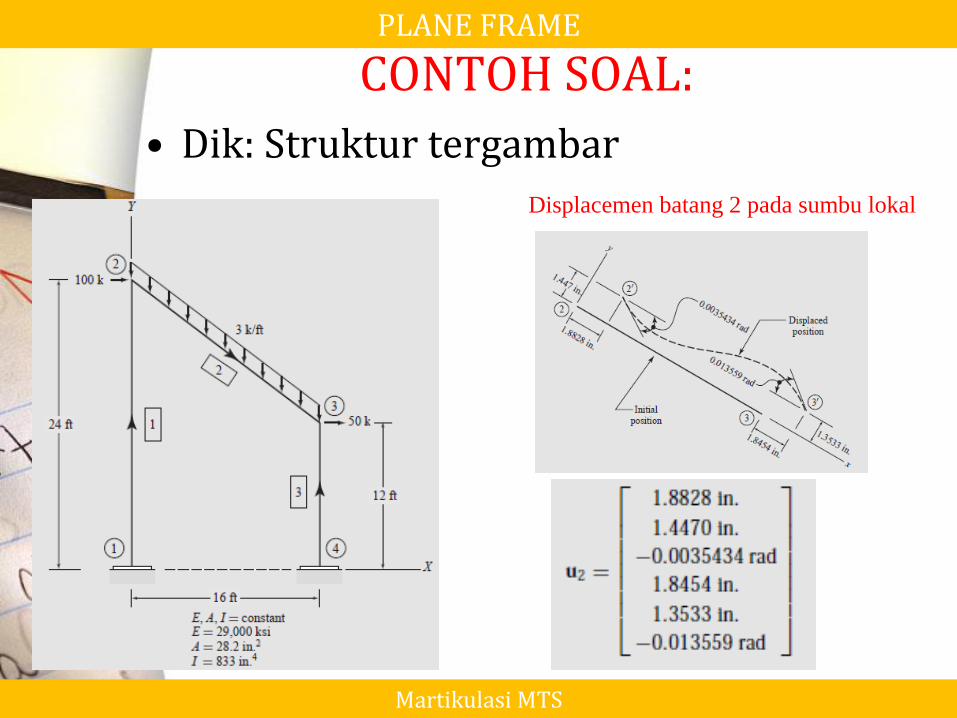
• Dik: Struktur tergambar
PLANE FRAME
Martikulasi MTS
Displacemen batang 2 pada sumbu lokal

CONTOH SOAL:
• Dit: Hitung displacemen dan gaya-gaya ujung batang 2 pada sistim koordinat global.
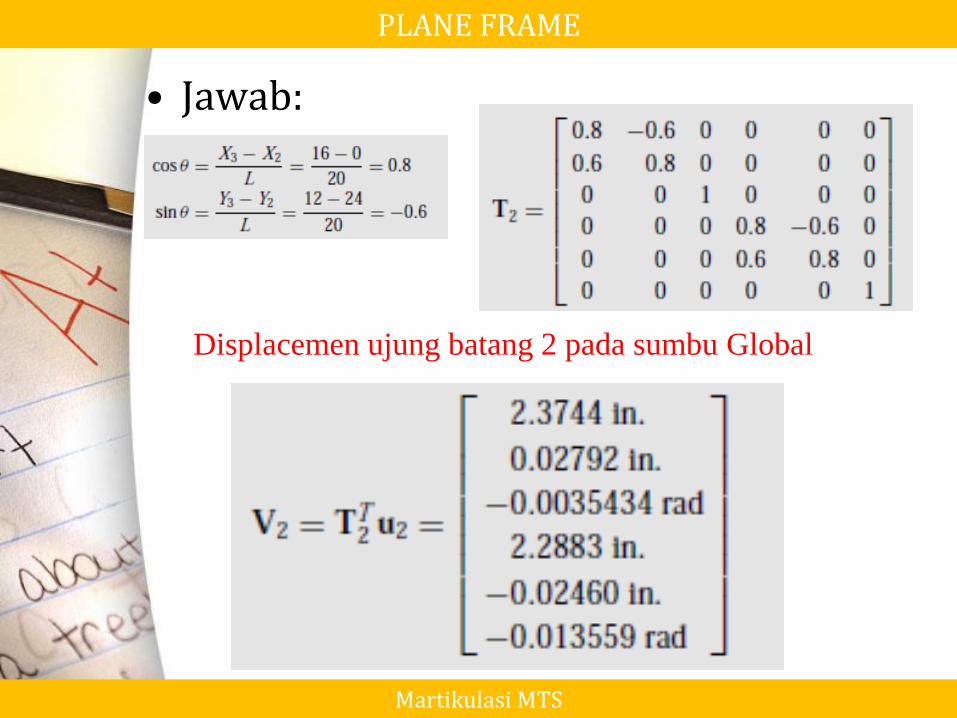
• Jawab:
PLANE FRAME
Martikulasi MTS

CONTOH SOAL:
• Jawab:
PLANE FRAME
Martikulasi MTS

CONTOH SOAL:
• Jawab:
PLANE FRAME
Martikulasi MTS
• Jawab:
PLANE FRAME
Martikulasi MTS
Displacemen ujung batang 2 pada sumbu Global

• Jawab:
PLANE FRAME
Martikulasi MTS
Gaya-gaya ujung batang 2 pada sumbu Global
Cek kesetimbangan:
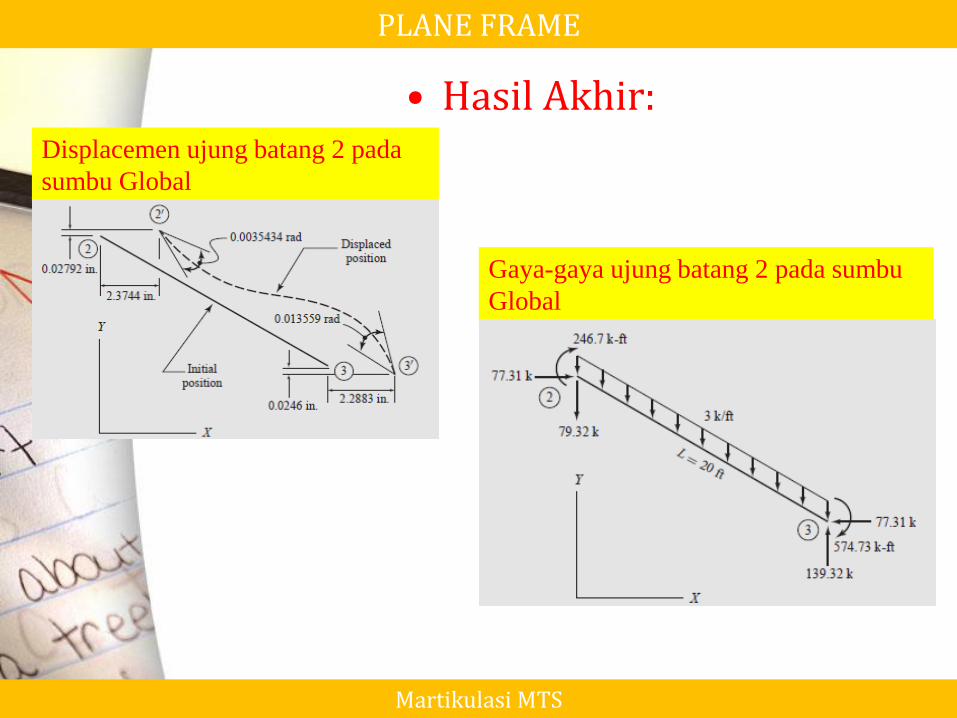
• Hasil Akhir:
PLANE FRAME
Martikulasi MTS
Displacemen ujung batang 2 pada
sumbu Global
Gaya-gaya ujung batang 2 pada sumbu
Global
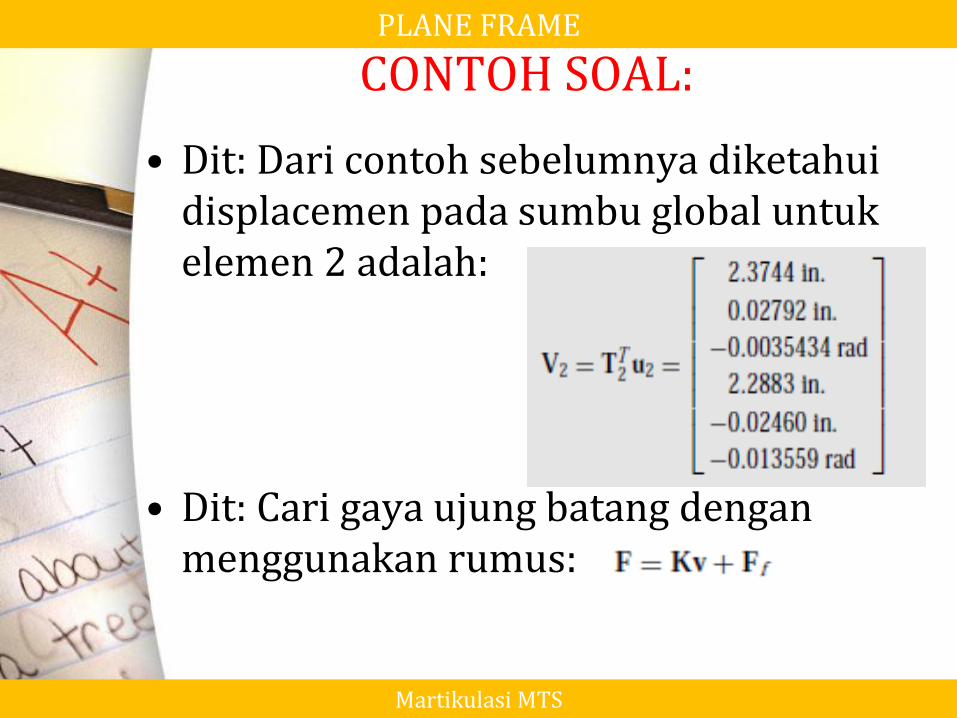
CONTOH SOAL:
• Dit: Dari contoh sebelumnya diketahui displacemen pada sumbu global untuk elemen 2 adalah:
• Dit: Cari gaya ujung batang dengan menggunakan rumus:
PLANE FRAME
Martikulasi MTS

• Jawab:
PLANE FRAME
Martikulasi MTS

• Jawab:
PLANE FRAME
Martikulasi MTS
HASIL AKHIR

SEKIAN
Any Question ???
PLANE FRAME
Martikulasi MTS