formulas t
DESCRIPTION
formulas de muchas cosasTRANSCRIPT
manual de fórmulas técnicas Kurt Gieck / Reiner Gieck
• Manual electrónico con fórmulas predisenadas
• Potente editor de fórmulas • Función de graneado
Alfaomega
I/APLICACIONES BÁSICAS
METROLOGÍA *
- r. FÍSICA * ; INGENIARÍA
TECNOLOGÍA INDUSTRIAL
ERIALES • PROPIEDADES
Unidades
Superficies Cuerpos Algebra
Trigonometría Geometría Analítica
Funciones Hiperbólicas Cálculo Diferencial
Cálculo Integral
Probabilidad y Estadística
Estática Cinemática
Dinámica
Hidráulica Térmica
Resistencia de Materiales
Elementos de Máquinas Máquinas-Herramienta
Electrotecnia Óptica e Iluminación
Química
Tablas
A
B C 13 E F G H
J
K El ¡Ñfii
N O P
Q R S 7 U
Z
II/APLICACIONES AVANZADAS MATEMÁTICAS
1 B b N U L U u 1A
TABLAS
Análisis Vectorial A' Funciones Racionales B'
Transformadas de Funciones C Ecuaciones Diferenciales D'
Análisis Estadístico E' Matemáticas Financieras F'
Teoría de Ecuaciones G'
Elementos de Máquinas O' Análisis de Esfuerzos P'
Maquinaria y Elementos Q' Manufactura y Procesos R'
Sistemas Eléctricos S' Radiaciones T'
Ingeniería de Control U'
Tablas Z'
Traducción:
Dr. Víctor Gerez Greiser Universidad Nacional Autónoma de México University of California (Berkeley)
Ing. José de la Cera Alonso Universidad Autónoma Metropolitana Technische Hochschule München
Con la colaboración de:
Ing. Quím. Virgilio González Pozo
Revisión, adaptación y complemento:
Ing. Francisco Paniagua Bocanegra Universidad Nacional Autónoma de México
Revisión técnica:
Francisco Javier Rodríguez Cruz Universidad Autónoma Metropolitana-Iztapalapa
Versión en español de la edición electrónica en alemán de la obra titulada: Technische Formelsammlung, por Kurt Gieck y Reiner Gieck
© 2000 by Gieck Verlag, D-82110 Germering, Germany ISBN 3 920379 21 7 75a. edición conjunta
© 2003 Alfaomega Grupo Editor, S.A. de C.V. Pitágoras 1139, Col. Del Valle 03100, México, D. F.
Miembro de la Cámara Nacional de la Industria Editorial Mexicana Registro No. 2317
Reservados todos los derechos. Prohibida su reproducción parcial o total por cualquier medio, mecánico, eléctrico, de fotocopiado, térmico u otros sin permiso expreso del editor
ISBN 970-15-0840-8, Alfaomega ISBN 84-267-1330-0, Marcombo
IMPRESO EN ESPAÑA – PRINTED IN SPAIN
PREFACIO
Miles de estudiantes de diversas áreas, técnicos e ingenieros han encontrado por muchos años en esta bien conocida obra: Manual de fórmulas técnicas, de Gieck, una útil herramienta para consultar las fórmulas técnico-científicas más usuales en sus campos de acción, de manera clara, concisa y ordenada. Por las completas explicaciones que se proporcionan y mediante la aclaración de los conceptos implicados, es posible entender bien las fórmulas, aun sin ser especialista en el tema.
Esta nueva edición revisada, corregida y aumentada, basada en la 30ª edición del clásico texto de bolsillo -además de conservar todas las cualidades de contenido y forma que lo han mantenido como el best-seller de los manuales técnicos y de ingeniería- incluye también un editor de fórmulas que le permitirá diseñar sus propias ecuaciones y graficarlas en un plano cartesiano, mediante la apertura de hasta 20 ventanas de cálculo, que pueden ser de parámetros variables o de resultados.
Se conservan, entre otras cosas, la impresión de texto en una sola cara del papel de la mayoría de las páginas, para que el usuario pueda efectuar anotaciones complementarias y observaciones en la otra; la clasificación e identificación de los temas con una letra mayúscula de gran tamaño en la esquina superior derecha, y la sección de tablas, ya que no siempre se puede llevar consigo una computadora.
En la parte de Aplicaciones avanzadas se han incluido los siguientes temas:
Teoría de ecuaciones Elementos de máquinas Ingeniería de control
En la Teoría de ecuaciones se exponen los conceptos fundamentales del álgebra superior, con lo que se da por completado el tema de álgebra. En la sección Elementos de máquinas se incluye lo relacionado con el diseño de engranes, y la sección Ingeniería de control proporciona de manera cabal los elementos conceptuales y algorítmicos necesarios para el análisis de un sistema.
Damos las gracias a los profesores M. Otto y H. W. Zimmer, quienes colaboraron en la ampliación y reelaboración de los temas.
Kurt Gieck Reiner Gieck
Colaboraron en esta obra:
Al cuidado de la edición Gonzalo Ferreyra Cortés
Programación de fórmulas Francisco Javier Rodríguez Cruz
Diagramación Jesús García Alvarez
Procesos gráficos Miguel Angel Ferreyra Cortés
Diseño de cubierta Javier Perdomo M.
Producción Guillermo González Dorantes
OBSERVACIONES SOBRE LAS FORMULAS
Magnitud de las cantidades físicas La magnitud de una cantidad física es el producto de su valor numérico y la unidad física seleccionada. Por lo tanto, el valor numérico es el cociente de la magnitud y la unidad. Entonces, por definición,
Magnitud = Valor numérico x Unidad
Si se selecciona una unidad n veces mayor, el valor numérico se reduce en la fracción 1/n; recíprocamente, si se adopta una unidad 1/n veces menor, el valor numérico es n veces mayor. El producto de valor numérico y unidad es constante, y la magnitud dada de una cantidad física es invariante en el cambio de unidad. Por ejemplo:
/ = 15 m = 15 x 10"3 km = 15 x 103 mm / = 3/¿A = 3 x 10-3 mA = 0.003 mA
TIPOS DE FORMULAS
Fórmulas de cantidades. Estas son las fórmulas normales en las que los símbolos corresponden a cantidades físicas. Permiten evaluar una cantidad sustituyendo las restantes por su magnitud (valor numérico por unidad). Al efectuar el cálculo se obtiene la magnitud de la cantidad por determinar. Por ejemplo, si en la fórmula í = 2slv se sabe qué s = 80 m y y = 8 m/s, resulta entonces:
= 2s m 2 x 80 m. m W = 2 Q s ( f o r m u l a / 2 3 ) v 8 m/s 8
Fórmulas de cantidades ajustadas. En estas ecuaciones cada símbolo de cantidad aparece dividido entre su correspondiente unidad. Por ejemplo, la fórmula s 78:
Estas fórmulas son útiles en diversas aplicaciones.
Fórmulas de unidades. Conversión. Estas ecuaciones presentan la relación de equivalencia entre unidades. Por ejemplo:
1 m = 100 cm 1 N = 1 kg ■ m/s2
Para efectuar la conversión de unidades, la equivalencia se expresa como un factor de valor numérico igual a la unidad. Así, de las fórmulas anteriores,

1 kg • m = 1 N • sg
1 N • s2 1 kg - m
Lo anterior permite obtener una magnitud en la unidad deseada, a partir de una ecuación de cantidades físicas. Por ejemplo, de la fórmula m 1:
F = ma
si m = 30 kg y a = 4 cm/s2, se tiene que para obtener F en newtons:
F = 30 kg x 4 cm/s2 = 30 kg ( ¡ ,N ! s ' ) x 4 ^ L (_>HL_) a y U k g ^ m i s2 \ 100 cm / = 1.2 N
Unidades en las fórmulas. La designación EU significa "ejemplo de unidad." En varias fórmulas se indican ejemplos de unidades. En tales casos, la primera unidad indicada es ia SI. Las demás unidades son de otros sistemas que todavía se emplean en algunos países. Por ejemplo, del sistema técnico métrico o del sistema técnico inglés.
La gran mayoría de las fórmulas presentadas en este manual son ias normales de cantidades físicas, en las que se aplican las unidades compatibles que corresponden a ias cantidades.
100 cm _ 1 m 1 m 100 cm
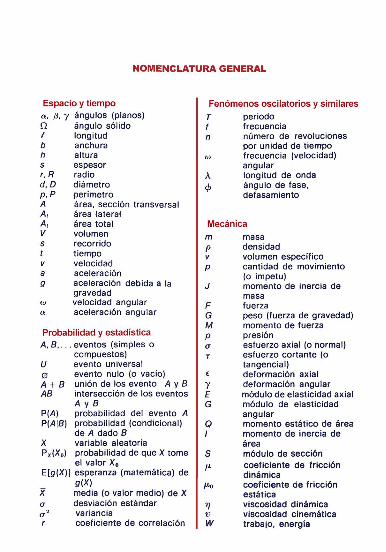
NOMENCLATURA GENERAL
Es pac a. 0, y
n 1 b h s i.fí d.D P.P A A A, V s t V
a 9
aj a
¡o y t iempo ángulos (planos) ángulo sólido longitud anchura altura espesor radio diámetro perímetro área, sección transversal área lateral área total volumen recorrido t iempo velocidad aceleración aceleración debida a la gravedad velocidad angular aceleración angular
Probabil idad y estadística A,B...
U 0 A + B AB
P(/\) P{A\B)
X Px(X0)
E[g(X)
X a a2
r
. eventos (simples o compuestos) evento universal evento nulo (o vacío) unión de los evento A y B intersección de los eventos Ay B probabilidad del evento A probabilidad (condicional) de A dado B variable aleatoria probabilidad de que X tome el valor X0
esperanza (matemática) de 9(X) medía (o valor medio) de X desviación estándar variancia coeficiente de correlación
Fenómenos osci lator ios y similare
T 1 n
( t>
A *
periodo frecuencia número de revoluciones por unidad de t iempo frecuencia (velocidad) angular longitud de onda ángulo de fase, defasamiento
Mecánica m p V
P
J
F G M P a T
£
y E G
Q 1
s ^ /¿o
V V
w
masa densidad volumen específico cantidad de movimiento (o ímpetu) momento de inercia de masa fuerza peso (fuerza de gravedad) momento de fuerza presión esfuerzo axial (o normal) esfuerzo cortante (o tangencial) deformación axial deformación angular módulo de elasticidad axial módulo de elasticidad angular momento estático de área momento de inercia de área módulo de sección coeficiente de fr icción dinámica coeficiente de fr icción estática viscosidad dinámica viscosidad cinemática trabajo, energía
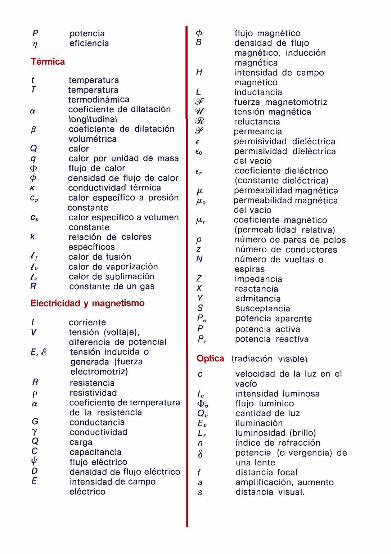
P potencia r¡ eficiencia
Térmica
t temperatura T temperatura
termodinámica a coeficiente de dilatación
longitudinal ¡i coeficiente de dilatación
volumétrica Q calor q calor por unidad de masa <l> f lujo de calor <P densidad de flujo de calor K conductividad térmica cp calor específico a presión
constante c„ calor específico a volumen
constante k relación de calores
específicos (¡ calor de fusión ¿v calor de vaporización ¿s calor de sublimación R constante de un gas
Electricidad y magnetismo
/ corriente V tensión (voltaje),
diferencia de potencial E, $ tensión inducida o
generada (fuerza electromotriz)
R resistencia p resistividad a coeficiente de temperatura
de la resistencia G conductancia y conductividad Q carga C capacitancia *P f lujo eléctrico D densidad de flujo eléctr ico E intensidad de campo
eléctrico
4> f lujo magnético B densidad de flujo
magnético, inducción magnética
H intensidad de campo magnético
L inductancia áf fuerza magnetomotriz 6H tensión magnética &l reluctancia & permeancia e permisividad dieléctrica e 0 permisividad dieléctrica
del vacío er coeficiente dieléctrico
(constante dieléctrica) fx permeabilidad magnética fjLo permeabilidad magnética
del vacío }*>r coeficiente magnético
(permeabilidad relativa) p número de pares de polos z número de conductores N número de vueltas o
espiras Z impedancia X reactancia V admitancia S susceptancia Pa potencia aparente P potencia activa Pr potencia reactiva
Óptica (radiación visible)
c velocidad de la luz en el vacío
l0 intensidad luminosa <i>„ f lujo lumínico Q„ cantidad de luz E„ i luminación Lr luminosidad (brillo) n índice de refracción 8 potencia (o vergencia) de
una lente / distancia focal a amplif icación, aumento s distancia visual.
PARTE I
APLICACIONES BÁSICAS
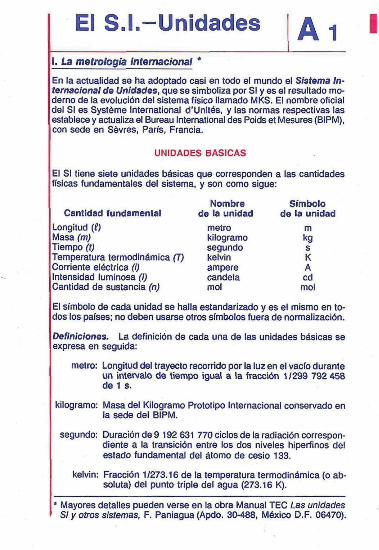
El S.l.-Unidades Ai I. La metrología internacional
En la actualidad se ha adoptado casi en todo el mundo el Sistema Internacional de Unidades, que se simboliza por SI y es el resultado moderno de la evolución del sistema físico llamado MKS. El nombre oficial del SI es Systéme International d'Unités, y las normas respectivas las establece y actualiza el Bureau International des Poids et Mesures (BIPM), con sede en Sévres, París, Francia.
UNIDADES BÁSICAS
Ei SI tiene siete unidades básicas que corresponden a las cantidades físicas fundamentales del sistema, y son como sigue:
Nombre Cantidad fundamental de la unidad
Longitud (t) metro Masa (rn) kilogramo Tiempo (t) segundo Temperatura termodinámica (T) kelvin Corriente eléctrica (i) ampere Intensidad luminosa (I) candela Cantidad de sustancia (n) mol
Símbolo de la unidad
m !<g s K A cd mol
El símbolo de cada unidad se halla estandarizado y es el mismo en todos los países; no deben usarse otros símbolos fuera de normalización.
Definiciones. La definición de cada una de las unidades básicas se expresa en seguida:
metro: Longitud del trayecto recorrido por la luz en el vacío durante un intervalo de tiempo igual a la fracción 1/299 792 458 de 1 s.
kilogramo: Masa del Kilogramo Prototipo Internacional conservado en la sede del BIPM.
segundo: Duración de 9 192 631 770 ciclos de la radiación correspondiente a la transición entre los dos niveles hiperfinos del estado fundamental del átomo de cesio 133.
kelvin: Fracción 1/273.16 de la temperatura termodinámica (o absoluta) del punto triple del agua (273.16 K).
Mayores detalles pueden verse en la obra Manual TEC Las unidades SI y otros sistemas, F. Paniagua (Apdo. 30-488, México D.F. 06470).
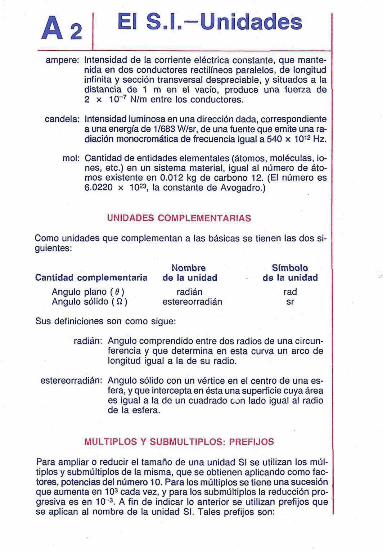
A2 El S.I.-Unidades ampere: Intensidad de la corriente eléctrica constante, que mante
nida en dos conductores rectilíneos paralelos, de longitud infinita y sección transversal despreciable, y situados a la distancia de 1 m en el vacío, produce una fuerza de 2 x 10""7 N/m entre ios conductores.
candela: Intensidad luminosa en una dirección dada, correspondiente a una energía de 1/683 W/sr, de una fuente que emite una radiación monocromática de frecuencia igual a 540 x 1012 Hz.
mol; Cantidad de entidades elementales (átomos, moléculas, iones, etc.) en un sistema material, igual al número de átomos existente en 0.012 kg de carbono 12. (El número es 6.0220 x 1023, la constante de Avogadro.)
UNIDADES COMPLEMENTARIAS
Como unidades que complementan a las básicas se tienen las dos siguientes:
Cantidad complementaria Ángulo plano (d) Ángulo sólido (ti)
Nombre de la unidad
radián este reo rradián
Símbolo de la unidad
rad sr
Sus definiciones son como sigue:
radián: Ángulo comprendido entre dos radios de una circunferencia y que determina en esta curva un arco de longitud igual a la de su radio.
estereorradián: Ángulo sólido con un vértice en el centro de una esfera, y que intercepta en ésta una superficie cuya área es igual a la de un cuadrado con lado igual al radio de la esfera.
MÚLTIPLOS Y SUBMÚLTIPLOS: PREFIJOS
Para ampliar o reducir el tamaño de una unidad SI se utilizan los múltiplos y submúltiplos de la misma, que se obtienen aplicando como factores, potencias del número 10. Para los múltiplos se tiene una sucesión que aumenta en 103 cada vez, y para los submúltiplos la reducción progresiva es en 1G-3. A fin de indicar lo anterior se utilizan prefijos que se aplican al nombre de la unidad SI. Tales prefijos son:
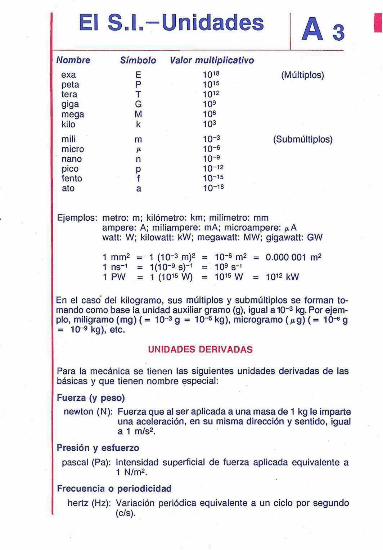
El S.I.-Nombre exa peta tera 9¡ga mega kilo mili micro nano pico fento ato
Símbolo E P T G M k m V-n P f a
Unidades Valor multiplicativo
1018
10^ 1012
109
106 103
10"3
10-6 10-9 10"12
10-15 ■10-18
As (Múltiplos)
(Submúltiplos)
Ejemplos: metro: m; kilómetro: km; milímetro: mm ampere: A; miliampere: mA; microampere: nA watt: W; kilowatt: kW; megawatt: MW; gigawatt: GW
1 mmE
1 ns~1
1 PW
0.000 001 m2 = 1 (10-3 m)2 = 10-6 m = 1(10-9 S)"1
m 109 S"1
= 1 (1015 W) = 101s W = 1012 kW
En el caso" del kilogramo, sus múltiplos y submúltiplos se forman tomando como base la unidad auxiliar gramo (g), igual a 10-3 kg. Por ejemplo, miligramo(mg){= 10_3g = 10~6 kg), microgramo (/*g) (= l0-«g = 10"9 kg), etc.
UNIDADES DERIVADAS
Para la mecánica se tienen las siguientes unidades derivadas de las básicas y que tienen nombre especial:
Fuerza (y peso) newton (N): Fuerza que al ser aplicada a una masa de 1 kg le imparte
una aceleración, en su misma dirección y sentido, igual a 1 mis2.
Presión y esfuerzo pascal (Pa): Intensidad superficial de fuerza aplicada equivalente a
1 N/m2.
Frecuencia o periodicidad hertz (Hz): Variación periódica equivalente a un ciclo por segundo
(c/s).
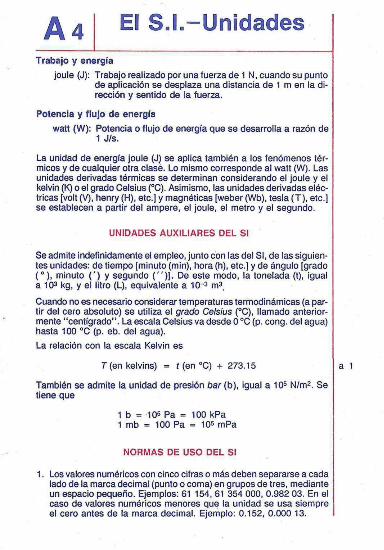
El S.l.-Unidades Trabajo y energía
joule (J): Trabajo realizado por una fuerza de 1 N, cuando su punto de aplicación se desplaza una distancia de 1 m en la dirección y sentido de la fuerza.
Potencia y flujo de energía watt (W): Potencia o flujo de energía que se desarrolla a razón de
1 J/s.
La unidad de energía joule (J) se aplica también a los fenómenos térmicos y de cualquier otra clase. Lo mismo corresponde al watt (W). Las unidades derivadas térmicas se determinan considerando el joule y el kelvin (K) o el grado Celsius (°C). Asimismo, las unidades derivadas eléctricas [volt (V), henry (H), etc.] y magnéticas [weber (Wb), tesla (T), etc.] se establecen a partir del ampere, el joule, el metro y el segundo.
UNIDADES AUXILIARES DEL SI
Se admite indefinidamente el empleo, junto con las del SI, de las siguientes unidades: de tiempo [minuto (min), hora (h), etc.] y de ángulo [grado ( ° ) , minuto (') y segundo ( " ) ] . De este modo, la tonelada (t), igual a 103 kg, y el litro (L), equivalente a 10-3 ms
Cuando no es necesario considerar temperaturas termodinámicas (a partir del cero absoluto) se utiliza el grado Celsius (°C), llamado anteriormente "centígrado". La escala Celsius va desde 0 °C (p. cong. del agua) hasta 100 °C (p. eb. del agua). La relación con la escala Kelvin es
7" (en kelvins) = í (en °C) + 273.15
También se admite la unidad de presión bar (b), igual a 105 N/m2. Se tiene que
1 b = 105 Pa = TOO kPa 1 mb = 100 Pa = 105 mPa
NORMAS DE USO DEL SI
1. Los valores numéricos con cinco cifras o más deben separarse a cada lado de la marca decimal (punto o coma) en grupos de tres, mediante un espacio pequeño. Ejemplos: 61 154, 61 354 000, 0.982 03. En el caso de valores numéricos menores que la unidad se usa siempre el cero antes de la marca decimal. Ejemplo: 0.152, 0.000 13.
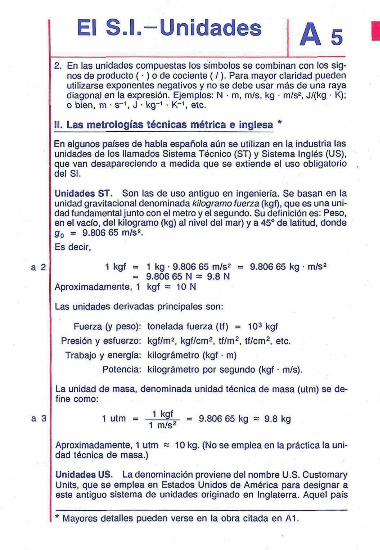
El S.l.-Unidades As 2. En las unidades compuestas los símbolos se combinan con los sig
nos de producto (•) o de cociente ( / ) . Para mayor claridad pueden utilizarse exponentes negativos y no se debe usar más de una raya diagonal en la expresión. Ejemplos: N • m, m/s, kg ■ m/s2, J/(kg ■ K); o bien, m ■ s -1, J ■ kg -1 ■ K~\ etc.
II. Las metrologías técnicas métrica e inglesa *
En algunos países de habla española aún se utilizan en la industria las unidades de los llamados Sistema Técnico (ST) y Sistema Inglés (US), que van desapareciendo a medida que se extiende el uso obligatorio del SI.
Unidades ST. Son las de uso antiguo en ingeniería. Se basan en la unidad gravitacional denominada kilogramo fuerza (kgf), que es una unidad fundamental junto con el metro y el segundo. Su definición es: Peso, en el vacío, del kilogramo (kg) al nivel del mar) y a 45° de latitud, donde g0 = 9.806 65 m/s2. Es decir,
1 kgf = 1 kg ■ 9.806 65 m/s2 = 9.806 65 kg • m/s2
= 9.806 65 N = 9.8 N Aproximadamente, 1 kgf os 10 N
Las unidades derivadas principales son:
Fuerza (y peso): tonelada fuerza (tf) = 103 kgf Presión y esfuerzo: kgf/m2, kgf/cm2, tf/m2, tf/cm2, etc. Trabajo y energía: kilográmetro (kgf ■ m)
Potencia: kilográmetro por segundo (kgf • m/s).
La unidad de masa, denominada unidad técnica de masa (utm) se define como:
1 utm = 1 k ? f , = 9,806 65 kg ~ 9.8 kg 1 m/s2
Aproximadamente, 1 utm ~ 10 kg. (No se emplea en la práctica la unidad técnica de masa.)
Unidades US. La denominación proviene del nombre U.S. Customary Units, que se emplea en Estados Unidos de América para designar a este antiguo sistema de unidades originado en Inglaterra. Aquel país
* Mayores detalles pueden verse en la obra citada en A l .
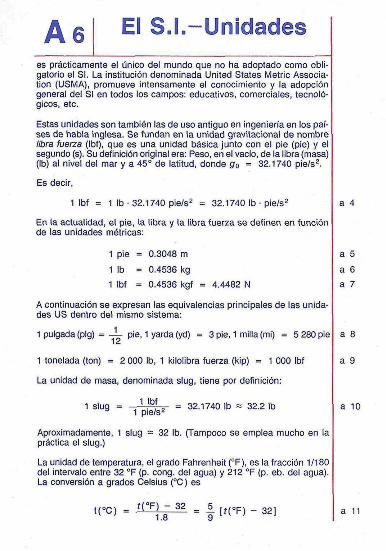
A6 El S.l. es prácticamente el único del mundo que no ha adoptado como obligatorio el SI. La institución denominada United States Metric Associa-tion (USMA), promueve intensamente el conocimiento y la adopción general del SI en todos los campos: educativos, comerciales, tecnológicos, etc.
Estas unidades son también las de uso antiguo en ingeniería en los países de habla inglesa. Se fundan en la unidad gravitacional de nombre libra fuerza (Ibf), que es una unidad básica junto con el pie (pie) y el segundo (s). Su definición original era: Peso, en el vacío, de la libra (masa) (Ib) al nivel del mar y a 45° de latitud, donde g 0 = 32.1740 pie/s2.
Es decir,
1 Ibf = 1 Ib ■ 32.1740 pie/s2 = 32.1740 Ib ■ pie/s2
En la actualidad, el pie, la libra y la libra fuerza se definen en función de las unidades métricas:
1 pie = 0.3048 m 1 Ib = 0.4536 kg 1 Ibf = 0.4536 kgf = 4.4482 N
A continuación se expresan las equivalencias principales de las unidades US dentro del mismo sistema:
1 pulgada (plg) = - L . pie, 1 yarda (yd) = 3 pie, 1 milla (mi) = 5 280 pie
1 tonelada (ton) = 2 000 Ib, 1 kilolibra fuerza (kip) = 1 000 Ibf
La unidad de masa, denominada slug, tiene por definición:
1 slug = 1 .lb,f - = 32.1740 Ib « 32.2 Ib s 1 pie/s2
Aproximadamente, 1 slug « 32 Ib. (Tampoco se emplea mucho en la práctica el slug.)
La unidad de temperatura, el grado Fahrenheit (°F), es la fracción 1/180 del intervalo entre 32 CF (p. cong. del agua) y 212 °F (p. eb. del agua). La conversión a grados Celsius (°C) es
t(°C) = ft°F> " 3 2 = A rf(°F) - 32] 1.8 9 l
a 12
a 13 a 14
a 15 a 16
a 17 a 18
a 19 a 20 a 21
a 22
a 23 a 24
a 25 a 26
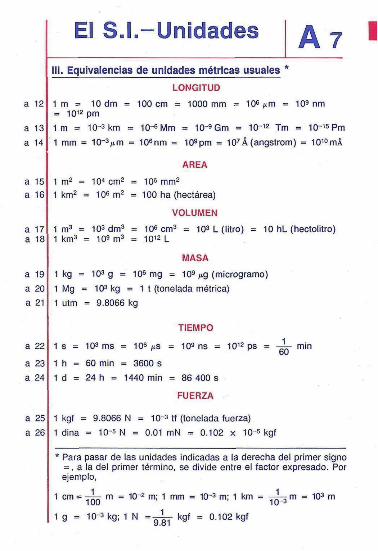
El S.I.-Unidades III. Equivalencias de unidades métricas usuales
LONGITUD
A7 ft
1m = 10 dm = 100 cm = 1000 mm = 106 ^m = 109 nm = 1012 pm 1m = 10-3 km = 10-6Mm = lO-^Gm = 10~12 Tm = 10~l5Pm 1 mm = 10-3íim = 106nm = 109pm = l07Á{angstrom) = 1010mÁ
ÁREA
1 m2 = 10" cm2 = 106 mm2
1 km2 = 106 m2 = 100 ha (hectárea)
VOLUMEN
1 m3 = 103dm3 = 106cm3 = 103 L (litro) = 10 hL (hectolitro) 1 km3 = 109m3 = 1012 L
MASA
1 kg = 103g = 106mg = 109 ¿¿g (microgramo) 1 Mg = 103kg = 1 t (tonelada métrica) 1 utm = 9.8066 kg
TIEMPO
1s = 103ms = 106/iS = 109ns = 1012 ps = -¿r- min oO
1 h = 60 min = 3600 s 1 d = 24 h = 1440 min = 86 400 s
FUERZA
1 kgf = 9.8066 N = 10'"3 tf (tonelada fuerza) 1 dina = 10^5 N = 0.01 mN = 0.102 x 10~5 kgf
* Para pasar de las unidades indicadas a la derecha del primer signo = , a la del primer término, se divide entre el factor expresado. Por ejemplo,
1 cm = -—— m = 10~2 m; 1 mm = 10~3 m; 1 km = —?- m = 103 m 10U 1U J
1 g = 10^3 kg; 1 N = ^ - kgf = 0.102 kgf
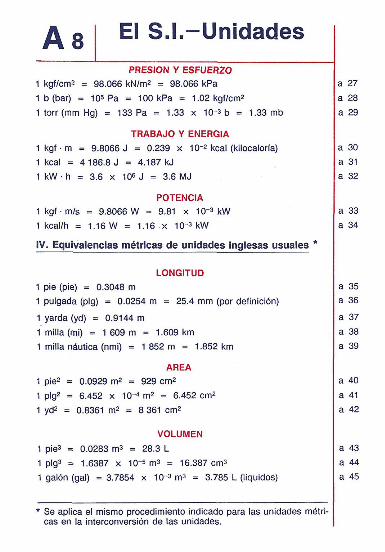
As El S.l.-Unidades PRESIÓN Y ESFUERZO
1 kgf/cm2 = 98.066 kN/m2 = 98.066 kPa 1 b (bar) = 10$ Pa = 100 kPa = l.02kgf/cm2
I tor r (mmHg) = 133 Pa = 1.33 x 10-3 D = 1.33 mb
TRABAJO Y ENERGÍA 1 kgf ■ m = 9.8066 J = 0.239 x 10~2 kcai (kilocaloría) 1 kcal = 4 186.8 J = 4.187 kJ 1 kW-h = 3.6 x 106 J = 3.6 MJ
POTENCIA 1 k g f m / s = 9.8066 W = 9.81 x 10"3 kW 1 kcal/h = 1.16 W = 1.16 x 10"3 kW
IV. Equivalencias métricas de unidades inglesas usuales *
LONGITUD 1 pie (pie) = 0.3048 m 1 pulgada (plg) = 0.0254 m = 25.4 mm (por definición)
1 yarda (yd) = 0.9144 m 1 milla (mi) = 1 609 m = 1.609 km 1 milla náutica (nmi) = 1 852 m = 1.852 km
1 pie2
1 plg2
1 yd2
= = =
0.0929 m2 = 6.452 0.8361
x 10" m2 =
ÁREA 929 cm2
* m2
8 361 = 6.452 cm2
cm2
VOLUMEN 1 pie3 = 0.0283 m3 = 28.3 L 1 plg3 = 1.6387 x 10~5 m3 = 16.387 cm3 1 galón (gal) = 3.7854 x 10~3 m3 = 3.785 L (líquidos)
* Se aplica el mismo procedimiento indicado para las unidades métricas en la interconversion de las unidades.
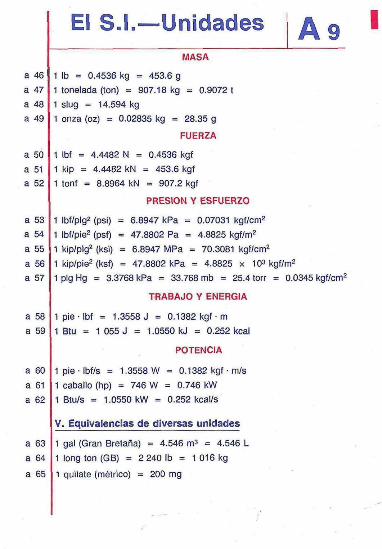
El S.I.—Unidades A9 MASA
1 Ib = 0.4536 kg = 453.6 g 1 tonelada (ton) = 907.18 kg = 0.9072 t 1 slug = 14.594 kg 1 onza (oz) = 0.02835 kg = 28.35 g
FUERZA
1 Ibf = 4.4482 N = 0.4536 kgf 1 kip = 4.4482 kN = 453.6 kgf 1 tonf = 8.8964 kN = 907.2 kgf
PRESIÓN Y ESFUERZO
1 Ibf/plg2 (psi) ■ 6.8947 kPa = 1 Ibf/pie2 (psf) = 47.8802 Pa = 1 kip/plg2 (ks¡) = 6.8947 MPa 1 kip/pie2 (ksf) = 47.8802 kPa
0.07031 kgf/cm2
4.8825 kgf/m2
70.3081 kgf/cm2
s 4.8825 x 103 kgf/m2
1 plg Hg = 3.3768 kPa = 33.768 mb = 25.4 torr = 0.0345 kgf/cm'
TRABAJO Y ENERGÍA
1 pie-Ibf = 1.3558 J ■ 0.1382 kgf m 1 Btu = 1 055 J = 1.0550 kJ = 0.252 kcal
POTENCIA
1 pie * Ibf/s = 1.3558 W = 0.1382 kgf ■ m/s 1 caballo (hp) = 746 W = 0.746 kW 1 Btu/s = 1.0550 kW = 0.252 kcal/s
V. Equivalencias de diversas unidades
1 gal (Gran Bretaña} = 4.546 m3 = 4.546 L 1 long ton (GB) = 2 240 Ib = 1 016 kg 1 quilate (métrico) = 200 mg
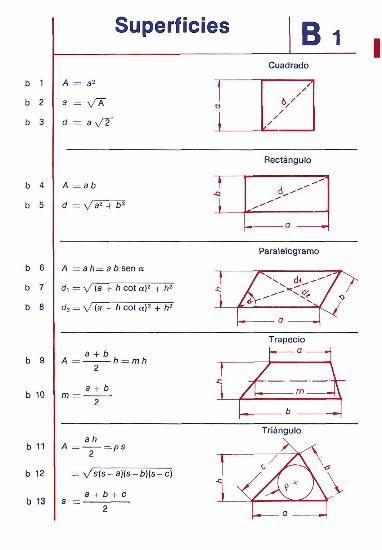
Superficies Bi A = a''
d = ay/T
Cuadrado
A = ab
d ^ x / ^ T ^
Rectángulo
d . - - "
A — ah = a b sen a
d, = V (a + fi cot a)2 + h2
d2 = ^[a - hcota}2 + h2
Paralelogramo
a + b A = h = m h
2
a + b
Trapecio
a h = ps
\/s{s^a)is~b)(s-c)
a + b + c
Triángulo
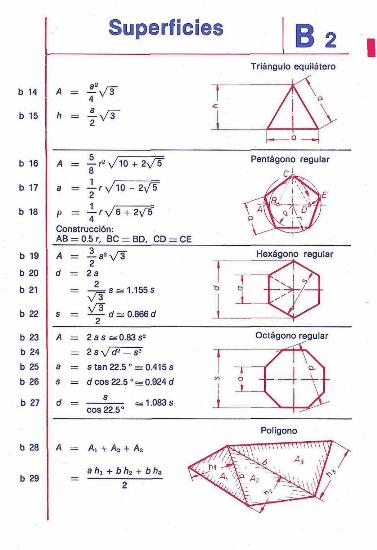
Superficies B2 Triángulo equilátero
7 ^ h = T V 3
A = — f¿ ^ 1 0 + 2^5~ 8
a = — r \ / l O - 2-/5~
Construcción: AB = 0.5 r, BC = BD, CD = CE
Pentágono regular el
2a 2
vi 2
Hexágono regular
s —1.155 s
d =- 0.866 d
c/ =
2 a s ss 0.83 s-2sVcP-s-' s tan 22.5° =0.415 s d eos 22.5°== 0.924 c/
1.083 a
Octágono regular
eos 22.5'
Polígono
A = ¿, -H ¿2 + A%
ahj + bh2 + bh3
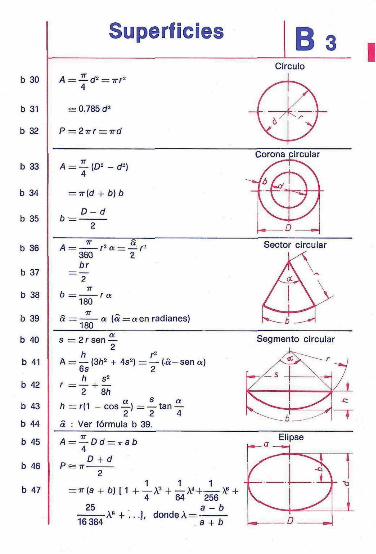
Superficies B 3 4
-= 0.785 d2
Círculo
A=—{D*-&)
ir{d -i-b)b
D- d
Corona circular
b — r a. 180
a — a (a =aen radianes) 180
Sector circular
s = 2 r sen — 2
A — — (3h2 + 4s2) — — (■&— sen a) 6s 2
_ ft sL' r ~~2 +8h
SV S /V h = r ( 1
a : Ver fórmula b 39
eos—) — — tan — 2 2 4
Segmento circular
A=-Dd = 4
D + tf PS= 7T
3 6
7r{a + b ) [ i + — A* + — A4 + — X8 4-4 64 256
25
16 384 Ae 4- ' , . . ] , donde A:
a + b
Cuerpos
c 1
C 2
c 3
C 4
C 5
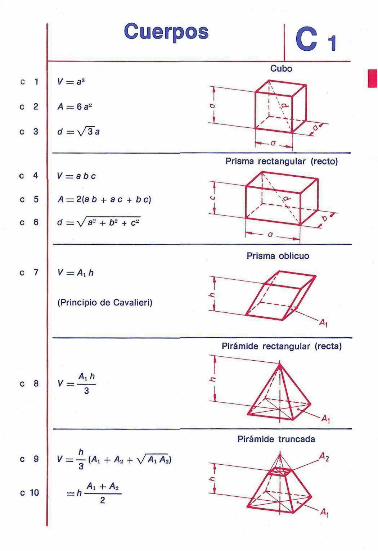
V = a*
A = 6a~
d =\/Za
V = abc
A = 2[a b + ac + be)
d = V a- + b-
C 7 V = Axh
(Principio de Cavalieri)
V = A,h
c 9
c 10
V = — [A1+Ai + V * I A Í )
Ai + A2
C 1 Cubo
Prisma rectangular (recto)
Prisma oblicuo
Pirámide rectangular (recta)
Pirámide truncada
Cuerpos
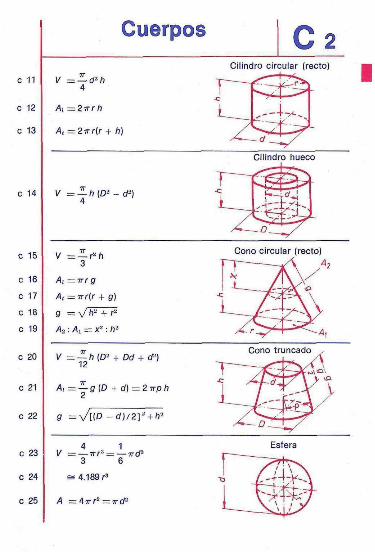
4
Ai = 2trrh
At -2irr[r + h)
C2 Cilindro circular (recto)
V = — h{D2-<f¡) 4
g(D + d)=2irph
y/[(D -d)/2]¿ + W
Cilindro hueco
1/ « £ . i M 3
4 ( =7rr g
/A, =:?rr(r + g) g = V ^ + r2
V = — ft (O2 + Dd + tf*)
-c
Cono circular (recto)
X^^-H-"*"*^,
1 Cono truncado ,
! 7<^xúy
<ia V = — Trr*
3 6 TTÓ*
= 4.189 r>
Esfera
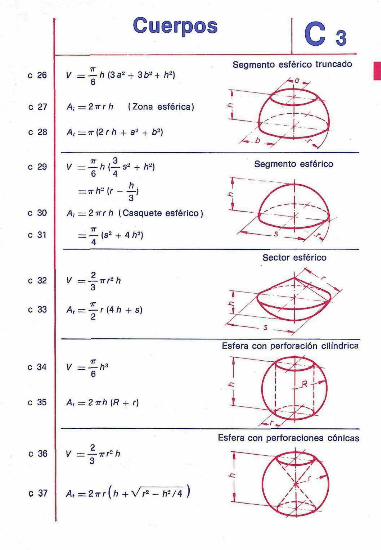
Cuerpos C3 c 26
c 27
C 28
c 29
c 30
c 31
c 32
c 33
c 34
c 35
c 36
C 37
V = — h (3 3 * + 3 6 * 4 h1
6
Ai—Z-Kfh (Zona esférica)
¿ , = 7 r ( 2 r h + a- + 62)
Segmento esférico truncado
A*) 6 4
A, = 2-rrr h (Casquete esfér ico)
Segmento esférico
S- — (S2 + 4 /l2) 4
1/ = — irr*h 3
A, = — r (4 ft + s)
Sector esférico
Esfera con perforación cil indrica
V = — n ;
>H, = 2 i r / ) (fl + r)
Esfera con perforaciones cónicas
1/ = — 7 r r 3 h 3
A* = 2 T T / - ( / 7 4 - V r 2 - h - / 4
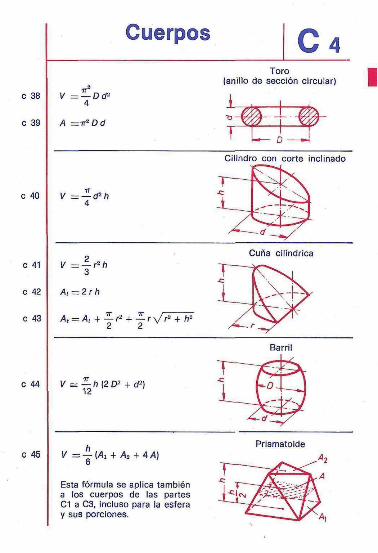
Cuerpos C4 C 38
c 39
V = — Dd¿
4
A =7TzDd
Toro (anillo de sección circular)
Cilindro con corte inclinado
c 40
c 41
c 42
c 43
c 44
Cuña cilindrica V = — r2h
3
At=2rh
At = At + - | r2 + -^ r /^7tf^
Barril
V ^—h&D2 f r f 2 ]
Prismatoide C 45 V = — {Ai + A2+ 4A) 6
Esta fórmula se aplica también a los cuerpos de las partes C1 a C3, incluso para la esfera y sus porciones.
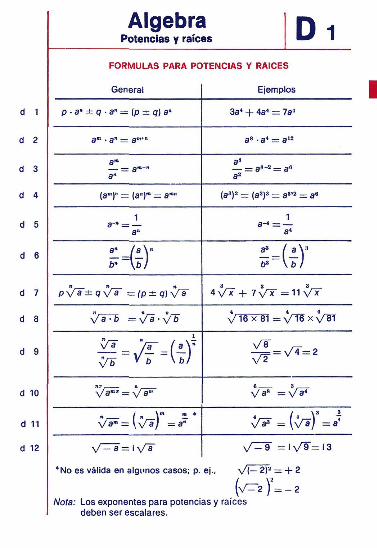
Algebra Potencias y raíces Di
FORMULAS PARA POTENCIAS Y RAICES
General
p • an ±q ■ an={p±q)a"
am • an = am+n
am
— = am-n
aB
(amf — {aB)m = amn
1 a-» = —
an
ft» \b)
p \rá~± q \fa~ =(p±q) V~a~
n n n y a • b a= v a • V b
|¡-v>H# nj; n ^ _ _
Vami = y >
Va™ = \ v a / = a "
V ™ a = i\/"a~
Ejemplos
3a4 + 4a" = 7a*
a8 -a4 z= a12
a8
— = a8-2 = a8
a2
(a3)2 = (a2)3 = a3*2 = a*
1 a-* = —
a*
£=(±y 3 3 3
4\Ax + 7\/x~ = 1 1 y/lT
y/ 16 x 81 = \ A € x > / B T
V8" — 7f = ^ = 2
Va 8 " ^ v ^ a 4 "
^ = ( ^ a ) 8 = a*
■ / ^ g " - ¡ y/9 = ¡ 3
*No es válida en algunos casos; p. ej. ' ( - 2)a = + 2
M=-\ V - 2 A/oía: Los exponentes para potencias y raíces
deben ser escalares.
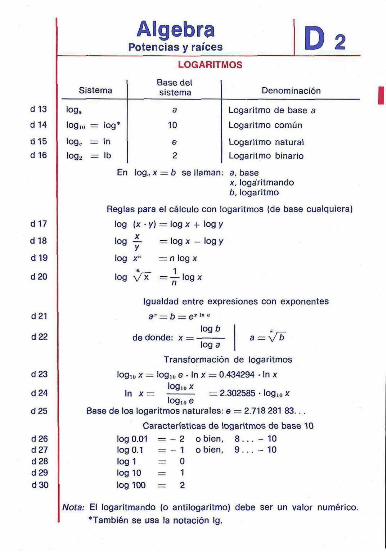
Algebra Potencias y raíces D2
LOGARITMOS
Sistema
log„
íog l ( ) = Iog*
loge = In
log2 = Ib
Base del sistema
a
10
e
2
Denominación
Logaritmo de base a
Logaritmo común
Logari tmo natural
Logaritmo binario
En log„ x — b se llaman: a, base x, logaritmando b, logaritmo
Reglas para el cálculo con logaritmos {de base cualquiera] iog (x • y) — Iog x + Iog y
: Iog x - Iog y Iog y
Iog xn
Iog í/x"
n Iog x
— Iog x
Igualdad entre expresiones con exponentes
b logo
de donde: x = a = \/b~ loga
Transformación de logaritmos logn, x — log1(l e • In x — 0.434294 • In x
toflw x In x 2.302585 - logi„x log,((e
Base de los logaritmos naturales: e = 2.718 281 83. . . Características de logaritmos de base 10
Iog 0.01 —-2 o bien, 8 . . . - 1 0 Iog 0.1 — - 1 oblen, 9 . . . - 10 log l = 0 Iog 10 ss 1 Iog 100 sa; 2
Nota: El logaritmando (o antilogaritmo) debe ser un valor numérico. *También se usa la notación Ig.
Algebra Potencias y raíces Ds
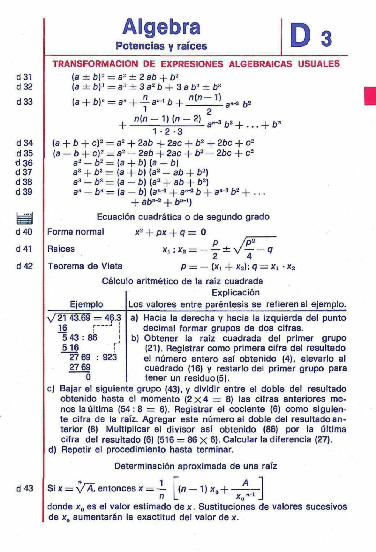
TRANSFORMACIÓN DE EXPRESIONES ALGEBRAICAS USUALES
b-< (a ± b)- = a2 ± 2 ab + b2
(a ± 6):' = « ' ± 3 3 = 6 + 3 a b- :
9
+ n ( n - 1 ) ( n - 2 ) ' b8 + . . . + b* 1-2-3
(a + 6 + c)2 = a2 + 2ab + 2ac + b2 + 26c + c2
(a — 6 + c)2 = a2 — 2ao + 2ac + b2 — 26c + c2
a2 - b2 = (a + 6) {a - 6) a3 + b» ={a + b) (a2 - a t + b2) a» - b3 = (a - b) (a2 + ab + b2) a" - 6» = (a - b) (a"-' + 9»* b + a»"3 b2 + . . .
+ ab-2 + b"-1) Ecuación cuadrática o de segundo grado
Forma normal x2 + px + g = 0 ^ _ _ _ P JW — ± V <7 2 4
Teorema de Vieta p = — (Xi + x2); q = x, ■ x2
Raíces X j ; X2 — -
Cálculo aritmético de la raíz cuadrada Explicación
Eiempio Los valores entre paréntesis se refieren al ejemplo. \f 21 43.69 = 16 r 5 43 : 86 516 27 69 : 27 69
0
46.3 a) Hacia la derecha y hacia la izquierda del punto decimal formar grupos de dos cifras.
b) Obtener la raíz cuadrada del primer grupo (21). Registrar como primera cifra del resultado el número entero así obtenido (4), elevarlo al cuadrado (16) y restarlo del primer grupo para tener un residuo(5).
c) Bajar el siguiente grupo (43), y dividir entre el doble del resultado obtenido hasta el momento (2X4 = 8) las cifras anteriores me-nos la última (54:8 = 6). Registrar et cociente (6) como siguiente cifra de la raíz. Agregar este número al doble del resultadoan-terior (8) Multiplicar el divisor así obtenido (86) por la última cifra del resultado (6) (516 = 86 X 6). Calcular la diferencia (27).
d) Repetir el procedimiento hasta terminar.
Determinación aproximada de una raíz
Si x — \f~A, entonces x = — I (n — 1) x„ —1 donde x„ es el valor estimado de x. Sustituciones de valores sucesivos de x„ aumentarán la exactitud del valor de x.
Algebra Teorema del binomio D4
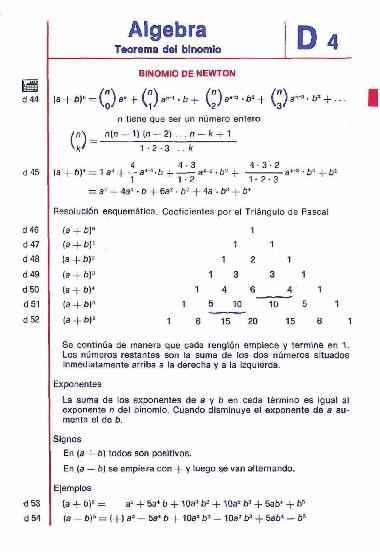
BINOMIO DE NEWTON
(a + (,)• = Q a- + CJ) a - ■ b + Q a - . b* + Q a - • b' + .
O n tiene que ser un número entero
ntfi —1)(«—.»...» —4 + 1 k' 1 - 2 - 3 .. k
4 4 -3 4 - 3 - 2 (a + b)4 = 1 a" H a'-'-o -\ a' 2 • b2 4 í " • b3 + b«
1 1-2 1-2-3 = a4 + 4a-' ■ b + 6a2 ■ b2 + 4a • b:i + b4
Resolución esquemática. Coeficientes por el Triángulo de Pascal
(a + b)« (a + « ' (a + b)2
(a + b)2
(a + b)1 1 (a + bp 1
(a + b)8 1 1
Se continúa de manera que cada renglón empiece y termine en 1. Los números restantes son la suma de los dos números situados inmediatamente arriba a la derecha y a la izquierda.
Exponentes
La suma de los exponentes de a y b en cada término es igual al exponente n del binomio. Cuando disminuye el exponente de a aumenta el de b.
Signos En (a + b) todos son positivos. En (a — b) se empieza con + y luego se van alternando.
Ejemplos (a + b)-"> = a= + 5a4 b 4- 10a:' b- + 10a2 b3 + 5ab4 + b3
(a - bV = (+) a"' - 5a' b + 10a3 6a - 10a2 b3 + 5ab4 — ba

Algebra Permutaciones, combinaciones y ordenaciones Ds
PERMUTACIONES
Número de permutaciones de n elementos*:
P„ = n! = 1 X 2 x 3 . . . x n
Ejemplo: Los n = 3 elementos a, b, c pueden permutarse de las seis maneras siguientes:
abe bac cab acb boa cba
P3 = 3! = 1 x 2 x 3 = 6 permutaciones
Caso especial: Si al permutar n elementos existen n, elementos del tipo 1. n2 elementos tipo 2 y n* elementos del tipo k, entonces:
n! n¡>. x n2< x . . . x nk\
Ejemplo: Los n = 3 elementos a, a, b pueden permutarse de tres maneras diferentes:
aab aba baa
En este cason = 3. n, = 2, n2 = 1; por loque
3' 1 x 2 x 3 P = .— = = 3 permutaciones
2! x 1! 1 x 2 x 1
COMBINACIONES Y ORDENACIONES
El número de modos diferentes en que pueden asociarse los elementos de un conjunto de n de ellos tomando k cada vez, sin tener en cuenta su orden, se llama número de combinaciones. Hay que especificar si los elementos se repiten o no.
Considerando el orden de los elementos se habla de ordenaciones.
La tabla D 6 presenta las fórmulas de combinaciones y ordenaciones, con y sin repetición de elementos.
*n! recibe el nombre de factorial n.
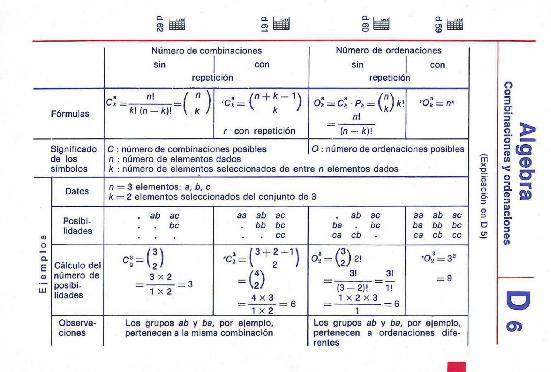
Fórmulas
Significado de los símbolos
e>
a. E
tu
Datos
Posibilidades
Cálculo del número de posibilidades
Observaciones
Número de combinaciones sin con
repetición
" ' ■ ( " )
k\(n-k)l \ k 1
r con repetición
Número de ordenaciones sin con
repetición
(fl - k)\
rOl=n"
C : número de combinaciones posibles 0 : número de ordenaciones posibles n : número de elementos dados k : número de elementos seleccionados de entre n elementos dados
n = 3 elementos; a, b, c k = 2 elementos seleccionados del conjunto de 3
. ab ac
. . be
«-o 3 x 2
= = 3 1 X 2
Los grupos ab y ba pertenecen a la mism
aa ab ac . bb be
ce
-0 1 x 2
por ejemplo, 3 combinación
ab ac ba . be ca cb
3! 3! [3 —2}l 1!
_ 1 x 2 x 3 1
aa ab ac ba bb be ca cb ce
r O Í = 3 2
= 9
Los grupos ab y ba, por ejemplo, pertenecen a ordenaciones diferentes
Algebra Determinantes D7
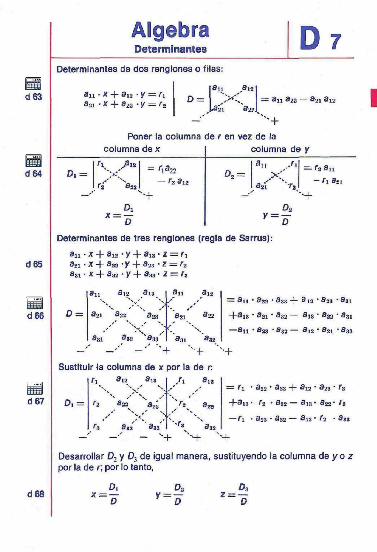
Determinantes de dos renglones o filas:
Mta Su • X + a12 • V = a2i • x + a22 . jr =
rait a l g : 3 n 3a2 — a 2 i 3 i 2
'■+
D , =
Poner la columna columna de x
\ >3i2 — r »
.,.'' X , r2 312 '2 «22
0, x = —
D
de r en vez
D2 =
de la columna de y
3 21 ?¿J
— H S u
— /"i a 2 1
Determinantes de tres renglones (regla de Sarrus):
Su • x + 8ia ■ y + au ■ z = r¡ 321 • X -(- 322 *V-|-32s - Z = T2
a8i • x - i - a32 ■ y + 3m • z = r3
Su S
321
^81
3ia 3ia "■<
S23 3a3
332 ^33
«11 s
321
<*31 3;
Sustituir la columna de x por la de r: / i
— 3 n * 322 " 3as -\- 3 ¡2 * 923 * 3¡ti
-|-3l3 • 321 " 3*2 — 3IS * «*22 * 33i
—3ll ' 323 * 832 — 3i2 ■ 32i ' 3ss
D , =
S i :
fa a
* u
22
aK
~-rj
— f 1 ' 325 * ^33 - j - 3 l 2 " 323 * ^3
- f -3 l3 • T2 ■ 3^2 — a13 * 322- f3
— /"l ■ 323 * 332 — 3j2 ■ T7. ■ 3a3
H Desarrollar D2 y D3 de igual manera, sustituyendo la columna de y o z por la de r, por lo tanto,
Di D2 Ds
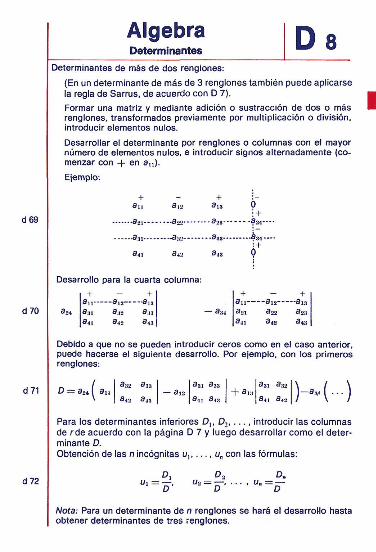
Algebra Determinantes Da
Determinantes de más de dos renglones: (En un determinante de más de 3 renglones también puede aplicarse la regla de Sarrus, de acuerdo con D 7). Formar una matriz y mediante adición o sustracción de dos o más renglones, transformados previamente por multiplicación o división, introducir elementos nulos. Desarrollar el determinante por renglones o columnas con el mayor número de elementos nulos, e introducir signos alternadamente (comenzar con + en au). Ejemplo:
3 n
a 2 i - - -
a 4 i
3 J 2
—•***"•
3*2
a«
. . . . a 2 8 —
3 «
0 ■ +
- - -a24
4«~. ! + 0
Desarrollo para la cuarta columna:
a-M a i r Sai 9 4 1
dv¿-- "•3 y¿ 3 «2 3 33 342 343
3 l 2 " 3-22 3i'2
+ " ■ 3 l 3
3ZA
34:Í
Debido a que no se pueden introducir ceros como en el caso anterior, puede hacerse el siguiente desarrollo. Por ejemplo, con los primeros renglones:
D = 32i í au — 3,2 Sai ^33
^41 348 + aia
33i 3 3 2
341 3 ; ! ) - ( ) Para los determinantes inferiores Dx, D2¡ ..., introducir las columnas de rde acuerdo con ta página D 7 y luego desarrollar como el determinante D. Obtención de (as n incógnitas u ¡ , . . . , un con las fórmulas:
U' = F' U2 D '
Nota: Para un determinante de n renglones se hará el desarroHo hasta obtener determinantes de tres renglones.
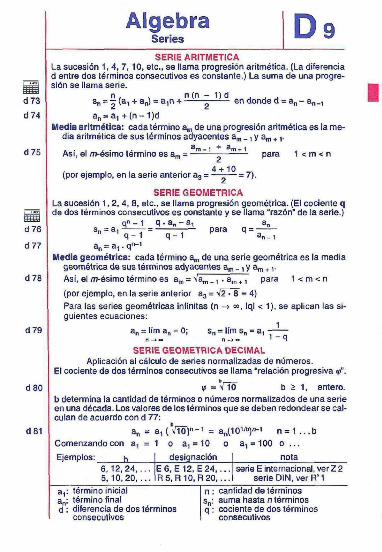
Algebra n g Series SERIE ARITMÉTICA
La sucesión 1, 4, 7, 10, etc., se llama progresión aritmética. (La diferencia d entre dos términos consecutivos es constante.) La suma de una progresión se llama serie.
n , , n(n - 1)d . . s„ = - (a, + a„) = a,n + en donde d = an - an_, a„ = a, + ( n - 1)d
Media aritmética: cada término am de una progresión aritmética es la media aritmética de sus términos adyacentes am _, y am + , .
am_, + am + 1 Así, el m-éstmo término es am ■ para 1 < m < n
(por ejemplo, en la serie anterior a3 ■ —-—=7) .
SERIE GEOMÉTRICA La sucesión 1,2,4, 8, etc., se llama progresión geométrica. (El cociente q de dos términos consecutivos es constante y se llama "razón" de la serie.)
q« - 1 q . a„ - a, a„ sn = a , — — = —-—-— para q = -
q - 1 q - 1 a„_, a „=a , .q " - '
Media geométrica: cada término am de una serie geométrica es la media geométrica de sus términos adyacentes am _, y am ±,. Asi, el m-ésimo término es am = Vam _, . am , ¡ para 1 < m < n (por ejemplo, en la serie anterior a3 = V2 ■ 8 = 4) Para las series geométricas infinitas (n -» « , Iql < 1), se aplican las siguientes ecuaciones:
an = líma„ = 0; sn = lím sn = a, ——
SERIE GEOMÉTRICA DECIMAL Aplicación al cálculo de series normalizadas de números.
El cociente de dos términos consecutivos se llama "relación progresiva <p". b
¡p = v 10 b > 1, entero. b determina la cantidad de términos o números normalizados de una serie en una década. Los valores de los términos que se deben redondear se calculan de acuerdo con d 77:
an = a, (V io ) " - 1 = anllO1*)"-" n = 1...b Comenzando con a, = 1 o a, = 10 o a, = 100 o . . . Ejemplos:
6,12,24, . 5 ,10,20, .
designación E6, E12, E24, R5, R10, R20,. . .
nota serie E internacional, verZ 2
serie DIN, ver R'1 a,: término inicial an: término final d : diferencia de dos términos
consecutivos
n: cantidad de términos s„: suma hasta n términos q : cociente de dos términos
consecutivos
Algebra Series
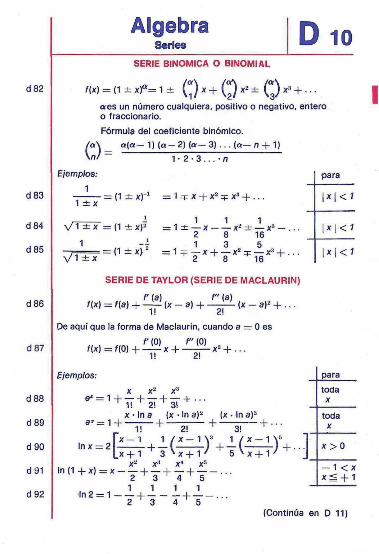
SERIE BINOMICA O BINOMIAL
D 10
a es un número cualquiera, positivo o negativo, entero o fraccionario. Fórmula del coeficiente binómico.
/a\ a{a- 1) ( a - 2) (a— 3 ) . . . {a— n + 1)
Ejemplos:
1 ± X 1
V 1 ± x = (1 t t x)2
1 , "I V i ± *
1- 2 - 3 . . . -n
- 1 q= X + X2 =p Xa + . . .
1 1 1 = 1 ± — X Xa ± — X3 — . . .
2 8 16 1 3 5
= 1 + - X H x2 + — x3 + . . . 2 8 16
para
| x | < 7
|*|<« | x | < 7
SERIE DE TAYLOR (SERIE DE MACLAURIN)
f (a) / " (a| /(*) = /(a) + — - (x - a) + —¿¡— (x - a)2 + . . .
De aquí que la forma de Maclaurin, cuando a = 0 es r (O) r (0)
f(x) = /(0) + - l i x + — ^ - x 2 + . . .
Ejemplos:
ex ■
a3
Inx
x x- x-1
x • Ina íx • Ina)2 (x • Ina)3
[X — 1 1 / X — 1 V 1 / * — 1 V
7TT + 7t7T7>>+^7íTJ+ J 1 1 1 1
ln 2 = 1 1 1 . . 2 3 4 5
para toda x
toda
x > 0
- 1 <x x S + 1
(Continúa en D 11)
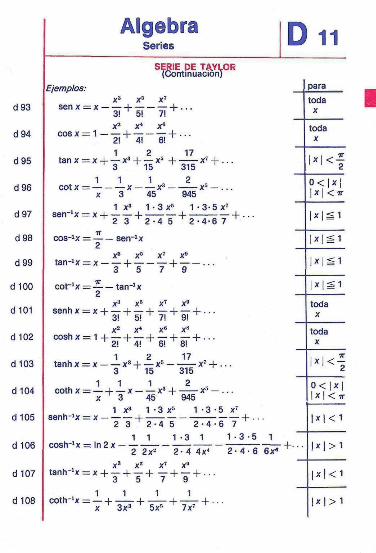
Algebra Series
SERIE DE TAYLOR (Continuación)
Ejemplos; Xa X5 X7
sen x = x 1 I - . . . 3! 5! 7! x'¿ x4 x6
eos x = 1 1 (-••■ 2! 4! 6! 1 2 17
tan x — x -\ x* H x5 -\ x7 + . . . 3 15 315
1 1 1 2 cot x = x x3 x5 — . . .
x 3 45 945 1 x3 1 ■ 3 x5 1 -3 -5x 7
2 3 2 - 4 5 2-4-6 7 7r
cos-lx = sen^x 2
X3 X5 X7 Xe
tan^x = x H 1 . . . 3 5 7 9
cot_1x = — — tarr^x 2
Xa X5 X7 Xa
senh x = xH 1 1 1 l- . . . 3! 51 7! 9! Xa X* X a XM
cosh x = 1 -| 1 1 1 1 - . . . 2! 4! 6! 8! 1 2 17
tanh x = x - x3 H x5 x7 + . . . 3 15 315
1 1 1 2 coth x = 1 x x3H x5 — . . .
x 3 45 945 1 xa 1 ■ 3 xa 1 • 3 • 5 x7
2 3 2 - 4 5 2 - 4 - 6 7 1 1 1-3 1 1-3-5 1 2 2x* 2- 4 4x4 2 - 4 - 6 6x8
x3 x-1 xT x" tanh_1x = x -\ 1 1 1 1 - . . .
3 5 7 9 1 1 1 1
coth'!x = 1 1 1 \-... x 3x3 5xr- 7x7
D
+ -■-
11
para toda
X
toda X
IxK-f 0 < |x ¡ 1 X | < 7 T
l*lasi
| x | á i
l * |S1
I*1S1 toda
X
toda X
i i i r \x\<~2
0 < | X |
I X | < 1
| x | > 1
| x | < 1
[*I>1
Algebra Series
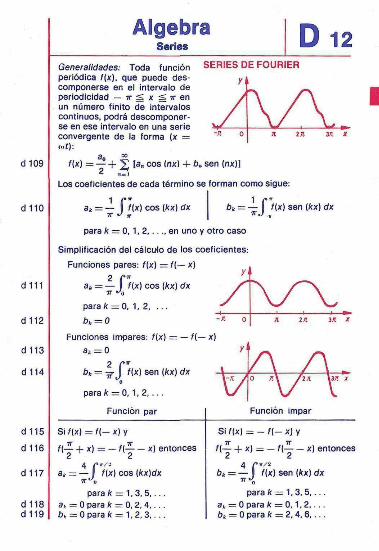
Generalidades: Toda función ' periódica f(x). que puede descomponerse en el intervalo de periodicidad - T g x í ir en un número finito de intervalos continuos, podrá descomponerse en ese intervaio en una serie convergente de la forma {x =
f(x) = — + V [a . eos ínx) 4- />„ 2 „TÍ
Los coeficientes de cada término se
1 C* ak = — I f(x) eos (/ex) dx
ir J w
para K = 0 , 1 , 2 en uno y
Simplif icación del cálculo de los co
Funciones pares: f(x) = f(— x)
2 f* ak = — f[x) eos (kx) dx
7T ^ o
paraK = 0, 1, 2, . . .
bk = 0
Funciones impares: f(x) = — f(—
%—0 2 C*
bk = •£■ J f(x) sen (kx) dx 0
para/c = 0 , 1 , 2, . . .
Función par
Si f(x) = f ( - x) y
f(— + x) = — f(— — x) entonces
4 /»*/-• a* = — I f(x) eos (kx)dx
para A: =r 1 , 3 , 5 , . . . ak = 0 para K = 0, 2, 4 6* = 0 p a r a x = 1,2,3
D12 SERIES DE FOURIER
.AA. -Ti 0 71 271 3/L Jf
sen (nx)\
forman como sigue:
bk = — f r-(x) sen (Kx) dx 7T J „
otro caso
eficientes:
y I
-A 0 S 27t 3rt X
x) y
\-7i y 0 JM / 2 / t UJT I
Función impar
Si f(x) = - f(- x) y
f( (- x) = — f( x) entonces 2 2
4 (**/* DA: — — I f{x) sen (kx) dx
para k = 1,3, 5 , . . . a(. = 0 D , = 0
Dará K = 3ara k =
0 , 1 , 2 , . . . 2 , 4 , 6 , . . .
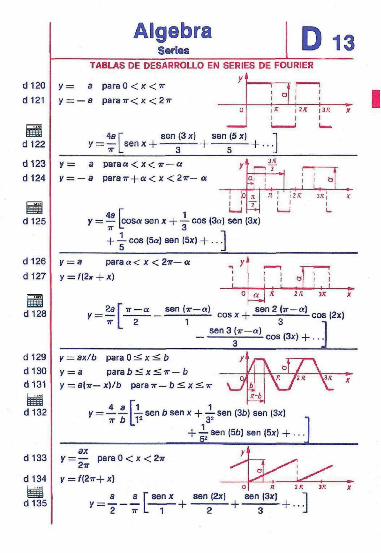
Algebra Serles D13
TABLAS DE DESARROLLO EN SERIES DE FOURIER
a para 0 < x < ir — a para ir < x < 2 T T I
2 * I3fl «
4a r sen (3 x) sen (5 x) sen x H 1 h ■
V =
v = -a paraa < x < 5T —a
- a para7r + a < x < 27T—a
4a r . , 1 „
t
i lo LJ
p M
J ' ■ ' ' ' 71 A ¡ ' Mx
t 1
1 1 Í3 1 r 3/1 ¡
i_
'
X
cosa sen x -| eos (3o) sen (3x) 71 ■■ 3 -\ eos (5o) sen (5x) -
5 y = a para a < x < 27r— a y = í(f* + X)
2a T i
-] y '
0 CK
! K
S
IR
1 1 ( 1 '
m )
, ir —a sen (7T—o) , sen 2 (ir — a) | — cosx + 1 -cos(2x)
sen 3 (7T—a) eos (3x) + .
y = axlb para O < x < 6 y = a para b S, x £ ir — b y = a(ir— x)/b para-jr— 6 < x < v r \ / ¿
— .±.£.[2 K _ ir b [ r
1 *-A
n fin \3n
sen i) sen x + — sen (3b) sen (3x)
+ ¿sen(5í>!sen(5x) +
y = — para O < x < 2ir 2w
f = í(2vT+ X) /í 2K 37T
a a T ser : T _ " 7 7 L ~
sen x sen (2x) sen (3x)
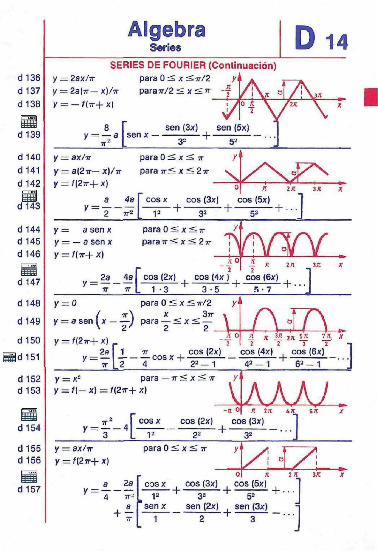
Algebra Series D l 4
SERIES DE FOURIER (Continuación) y = 2ax/7r para 0 < x <TT /2 y y = 2a[n— x)/ir para7r/2 S x < " " - f y = ~t[w+x)
8 r ; — a sen x — "a L
sen (3x) sen (5x)
y = axl-n y = a(2ir— x)/w y = f(2ir+ x)
para 0 < i < i para i r < X £ 2 I
a 4a f co!
\ / \ ^ eos x eos (3x) eos (5x)
3» ' 52 ] y = a sen x y = — a sen x y = f ( i r+x)
2a
para O S x S i r para 7r < x S 2 7T
2a 4a I eos (2x T ~ T L 1-3
| eos(4x I eos <6x) 3 - 5
para 0 < x < TT/2 / i r \ x 3ir »
y = a s e n l x 1 para — < x £ — \
y = f(27r+ x)
y = —
A-JA ir , , eos (2x)
— eos x A ¡—— 4 2~' -1
eos (4x) 42 _ 1
55 11, x 2
eos (6x 4-] y = x2 para — ir < x S, ir y = r ( - x ) = /(2ir+x)
j r 2 I OOS > = — - 4
3 L 12
eos ¡2x) eos (3x)
\AAA7 " 1 JX ln AJÍ SK
y — ax/v y = f(2ir+x)
para 0 < X < T
2a
.AIZi eos x eos (3x) eos (5x)
12 32 52 "*"" sen x sen (2x[ sen (3x) _
1 2 3 " '
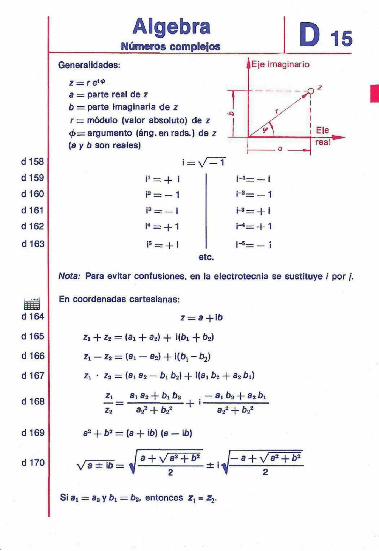
Algebra Números complejos D15
sneralidades:
z = reu" a = parte real de z b = parte imaginaria de z r = módulo (valor absoluto) de
j [Eje imaginario
1 i
<f>= argumento (áng.en rads.) de z (a y b son reales)
,
i> = + i P = - 1 l» = - ¡
¡' = + 1 ¡* = + ¡
'y '
/ * ! i Ele . . I r e a ' *
-1
i-1= — i 1 - 2 = _ 1
h»=+l H = + 1
| - s t S — 1 etc.
Nota: Para evitar confusiones, en la electrotecnia se sustituye / por /.
En coordenadas cartesianas:
z = a + i b
zl + z2 = (a, + a2) -|- i(b, - j- b2)
Zi — z2= (ai — a») + i(b1 - b2)
z, • z2 = (ai a2 — b t b2) + ¡(a, b2 + a2 b-¡)
Zi
z2" ai ai¡ + bi b¿ — ai b2 + a2 bi
as2 + te2 a2
2 + b22
a2 + £>» = (a -+- ib) (a - ib)
\ / ^ ^ 6 = V — ¿ — ^ V 1
Si a¡ = aa y 6i = b2, entonces r, = Zj.
Algebra Números complejos D l 6
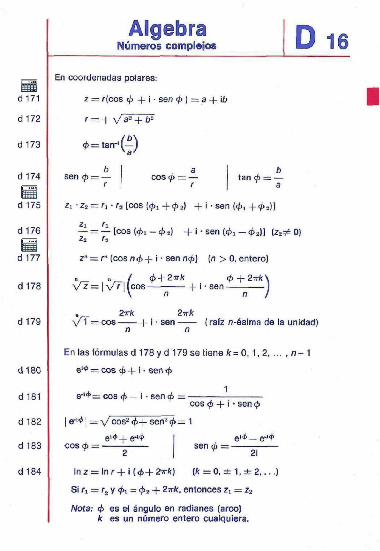
En coordenadas polares:
z = r(cos <fi + ¡ ■ sen <f>) = a + ib
' = + V a¿ + b2
A = tan-' (—)
5 s e n <t>: cos A = —
6 tan A = —
z, •** = /•,-r., [eos (A, 4-*s) + ¡ • sen (Ai+<¿>S)I
Zi fi — = —[eos ((/¡i-1#> ¡¡) + i -sen (A,— A¡¡)] ( z 2 ^ 0)
z" = r" (eos n<f>-\-\- sen nc£) (n > 0, entero)
/ <j>+2irk <f>+2-nk\ \ / T = | v 7 | [eos 1- ¡ ■ sen I
\ n n I , 2trk 2irk
v T = eos 1- ¡ ■ sen (raíz n-ésima de la unidad) n n
En las fórmulas d 178 y d 179 se tiene /r= 0, 1, 2, ... , n- 1
e"*> = eos <f> + i - sen <f>
e-'*= eos A — i • sen <f> = eos </> + i ■ sen <£
| er1* | = Vcos24>+sen2</i = 1
e i*_l_ g-icj> e'*— e-"f> eos A = sen á =
2 . v 2¡ lnz = lnr + i(A+29rít) (/( = 0 . ± 1, ± 2,...)
Si f i = r2 y <>, = <í>2 + 2-jrk, entonces z¡ = z2
Nota; <f> es el ángulo en radianes (arco) k es un número entero cualquiera.
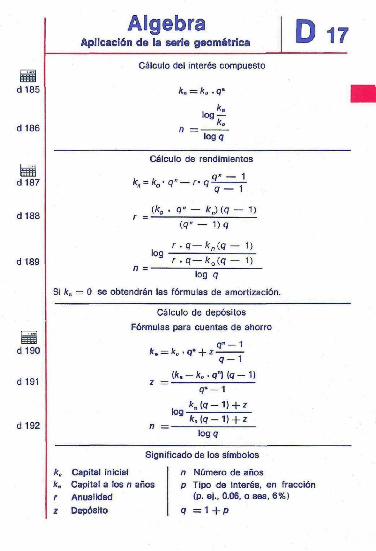
Algebra Aplicación de la serie geométrica
Cálculo del interés compuesto
k. — k0. q"
k* log —
k„ logq
Cálculo de rendimientos
i , > q" — 1 kn = k0-q" — r-q Hq _ ~
(*■„ • <7" - <U«J — 1) «?" — D<?
r . q — fc„(q — 1) log
r.q— ka(q- 1) n ■
log <j Si kn = 0 se obtendrán las fórmulas de amortización.
Cálculo de depósitos Fórmulas para cuentas de atiorro
q" — 1 k. = ke.q* + z
fif-1
( * . - * . - q " ) ( q - 1 ) q » - 1
_ M l - 1 » + « " ° fc.(q-D + z
logq
Significado de los símbolos
fr„ Capital inicial k, Capital a los n años r Anualidad z Depósito
n Numero de años p Tipo de interés, en
D
fracción <p. ej., 0.06, osea, 6%)
q = 1 + p
17
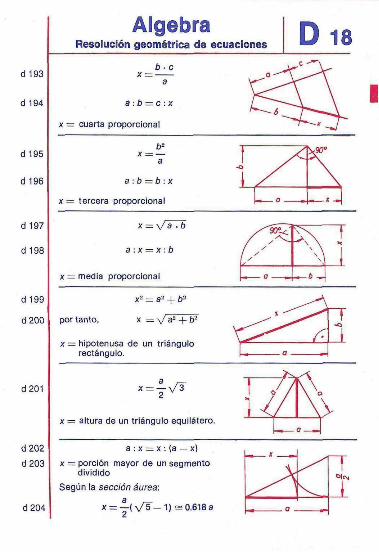
Algebra Resolución geométrica de ecuaciones D 18
d193
d194
d195
d196
d197
d 198
d 199
d200
d201
d202 d203
d204
b.c
a:b — c : x
x — cuarta proporcional
b2
a :b — b : x
x = tercera proporcional
x = \/ a ■ b
a : x = x : b
x= media proporcional
x2 = a'¿ + b2
por tanto, x — -\/ a2 -\- b^
x = hipotenusa de un triángulo rectángulo.
x=-V3
x = altura de un triángulo equilátero.
a : x =x : [a — x) x = porción mayor de un segmento
dividido Según la sección áurea:
x = - ( V 5 - 1 ) - 0.618a 2
m X m
— 0 -
X" OlíM
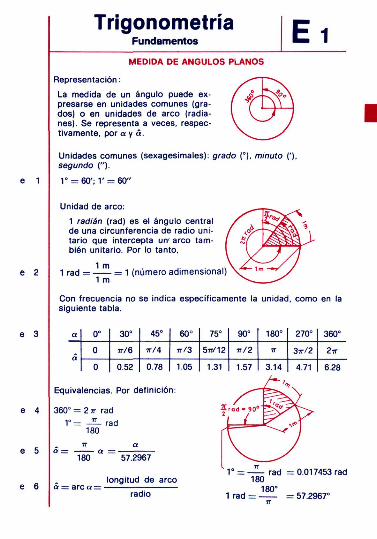
Trigonometría Fundamentos Ei
MEDIDA DE ÁNGULOS PLANOS
Representación: La medida de un ángulo puede expresarse en unidades comunes (grados) o en unidades de arco (radianes). Se representa a veces, respectivamente, por a y a .
Unidades comunes (sexagesimales): grado (°). minuto ('), segundo ("). 1° = 60'; V = 60"
Unidad de arco: 1 radián (rad) es el ángulo central de una circunferencia de radio unitario que intercepta un' arco también unitario. Por lo tanto.
1 m , , .. 1 rad = = 1 numero adimensional)
1 m
Con frecuencia no se indica específicamente la unidad, como en la siguiente tabla.
a
„
0°
0
0
30°
jr/6
0.52
45°
7T/4
0.78
60°
n/3
1.05
75°
5TT/12
1.31
90°
TT/2
1.57
180°
7T
3.14
270°
3?r/2
4.71
360°
2ir
6.28
Equivalencias. Por definición:
360° = 2 7r rad
180 ir
°~ 180
á = are a = ■
rad
57.2967
longitud de arco radio
1° = rad = 0.017453 rad 180
180° 1 rad = = 57.2967°
Trigonometría Fundamentos E2
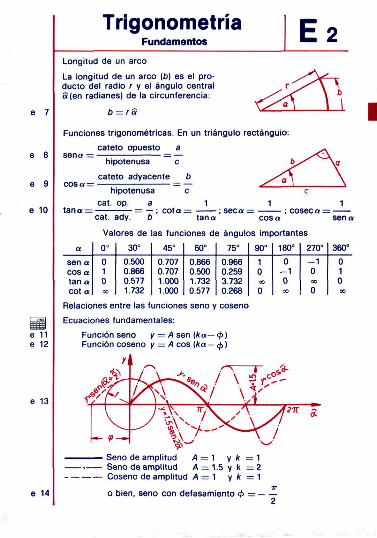
Longitud de un arco La longitud de un arco (b) es el producto del radio r y el ángulo central a (en radianes) de la circunferencia:
Funciones trigonométricas. En un triángulo rectángulo cateto opuesto a
hipotenusa cateto adyacente
hipotenusa cat. op. a 1 1 1
tan« = = — ; cota = ; seca = ; coseca = cat. ady. b tana cosa sena
a
sen a c o s a tan a cot a
Valores de las funciones de ángulos importantes
0°
0 1 0 00
30°
0.500 0.866 0.577 1.732
45°
0.707 0.707 1.000 1000
60°
0.866 0.500 1.732 0.577
75°
0.966 0.259 3.732 0.268
90°
1 0 00
0
180°
0 - 1 0 00
270° - 1 0 00
0
360°
0 1 0 00
Relaciones entre las funciones seno y coseno Ecuaciones fundamentales:
Función seno y = A sen [ka— <f>) Función coseno y = A eos [ka— $)
• Seno de amplitud Seno de amplitud Coseno de amplitud A
A = 1 y k = 1 /\ = 1.5 y k = 2
1 y k = 1
o bien, seno con defasamiento 4> = -
Trigonometría Variaciones en los cuadrantes
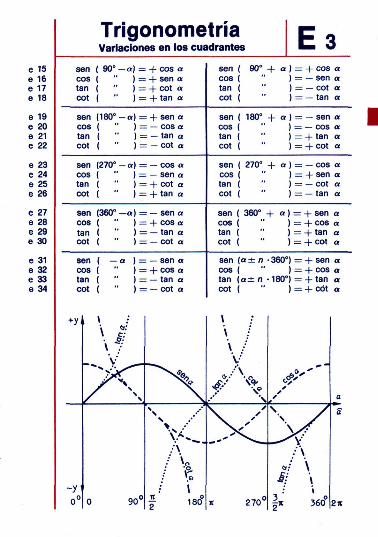
sen ( 90° —a) = ■+• eos a eos ( " ) = + sen a tan ( " ) = + cot a cot ( " ) = + tan a
sen (180° — a) = + sen a eos ( " ) = — eos o tan ( ) = — tan a cot ( " ) = — cot a
sen (270° - a) = — eos a eos ( " ) = — sen a tan ( " ) = + cot a cot ( " ) = + tan a
sen (360° ~a) = — sen a eos ( " ) = + eos a tan ( " ) = — tan a cot ( " ) = — cot a
sen { — o ) = — sen a eos ( " ) = + eos a tan ( " ) = — tan a cot ( " ) = — cot a
*y
-y 0°
\ J
—^ V —
/ v
0 90°
^ \
\ / V
V ■•''
i V •; 5 / \ f 18C?
F * L- O
sen ( 90° + a ) = + eos a eos ( " ) = — sen a tan ( " ) = — cot a cot ( " ) = — tan a
sen ( 180° -|- a ) = — sen a eos ( " ) = — eos a tan ( " ) = + tan o cot ( " ) = -f- cot a
sen ( 270° + a ) = — eos a eos ( " ) = + sen a tan ( " ) = — cot a cot ( " ) = — tan o
sen ( 360° + a) = + sen a eos ( " ) = + eos a tan ( " ) = + tan a cot ( " ) = + cot a
sen (ar ± n • 360°) = + sen a eos ( " ) = - i - eos a tan ( o f ± n • 180°) = + tan a cot ( " ) = + cbt o
\ ; \ / \ / V
/ \ X . *
*" ^^^^
it 270°
—
* * /
" \ v ?
" ^ A o / \
i/ \ •
¥ 360°
a a
2 i t
Trigonometría Transformaciones trigonométricas E4
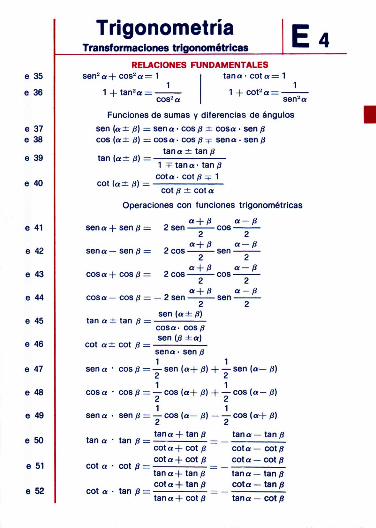
RELACIONES FUNDAMENTALES s e n 2 a + cos 2a = 1
1 + tan2a = -
t a n a ' c o t a = 1
1 + cot2 a = sen2 a
Funciones de sumas y diferencias de ángulos sen (a ± p) = sen a ■ eos p ± cosa • sen p eos ( a ± í¡) = c o s a , eos p + sena • sen p
t a n a ± tan/S tan ( a ± /3) =
cot ( a ± /3) =
1 " t a n a - tan p cota • cot p + 1
cot jS ± cot a
Operaciones con funciones trigonométricas
a+p a - / 3 sen a + sen /s = 2 sen eos
sen a — sen p = 2 eos «+/ COSa+ COS /i :
a+P 2 cos cos
a+p cosa — cos j3 = — 2 sen sen
2 a - 0
2 a - / 3
2 a - 0
tan a ± tan p = -
cot a ± cot 0 =
sen (a ± /3)
cosa- cos/S sen (/3 ± a)
sena- senp 1 1
sen a • cos p = — sen (a - f /S) H sen (a— p)
1 1 cos a ■ cos p = — cos ( a + ,8) + — cos (a — /3)
1 1 sen a ■ sen p = — cos (a— j8) cos ( a + /S)
tan a • tan 0 =
cot a • cot 0 :
cot a • tan £ =
tana + tan p cot a + cot (8 co ta + cot /S tan a 4- tan /j cot a + tan /9 tan a + cot /3
t a n a — tan/3 c o t a — cot/3 co ta — cot p
t a n a — tan/s co ta — tan p
tana — cot p
Trigonometría T r a n s f o r m a c i o n e s t r i g o n o m é t r i c a s Es
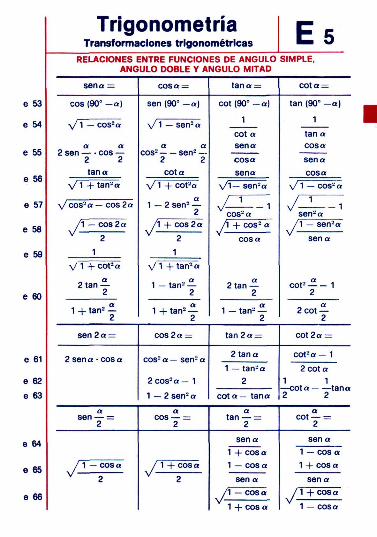
RELACIONES ENTRE FUNCIONES DE ÁNGULO SIMPLE, ÁNGULO DOBLE Y ÁNGULO MITAD
sena =
eos (90° —a)
V 1 — cos2a
a a 2 sen eos —
2 2 t a n a
V 1 + tan2a
V c o s 2 a — eos 2a
/ 1 — eos 2 a
2
1
V 1 + c o f a
2 tan — 2
1 + tan2 —
sen 2 a =
2 sena - c o s a
a sen — =
2
/ 1 — COS a
^ 2
c o s a =
sen (90° —a)
\/1 — sen2 a
a a eos2 sen2 —
2 2 c o t a
V 1 + COt2a a
1 — 2 sen2 — 2
/ 1 + COS 2 a
1 V + tan 2 a
1 - tan2 — 2
1 + tan2 — 2
eos 2 a =
eos2 a— sen2 a
2 eos2 a — 1
1—2 sen2 a
a eos — =
2
/ 1 + c o s a
2
t a n a =
cot (90° —a)
1
COt a sena
c o s a sena
V — sen-'a
/ 1 1 eos2 a
/ l + eos2 a c o s a
a 2 tan —
2 a
1 — tan2 — 2
t a n 2 a =
2 tan a
1 — tan2 a 2
c o t a — tana
a tan — =
2
sena 1 + eos a 1 — c o s a
s e n a / 1 — COS a
1 + eos a
c o t a =
tan (90° —a)
1
t a n a c o s a
sena cosa
V 1 — eos2 a
• / 1 1 sen2 a
/ 1 — sen2a
sena
cot2 — — 1 2
a 2co t —
2
cot 2 a =
cot2 a — 1
2 cot a 1 1
— c o t a tana 2 2
a cot — =
2
sen a 1 — eos a 1 + eos a
s e n a / 1 + eos a
1 — COSa
Trigonometría T e o r e m a s o leyes pr incipales Ee
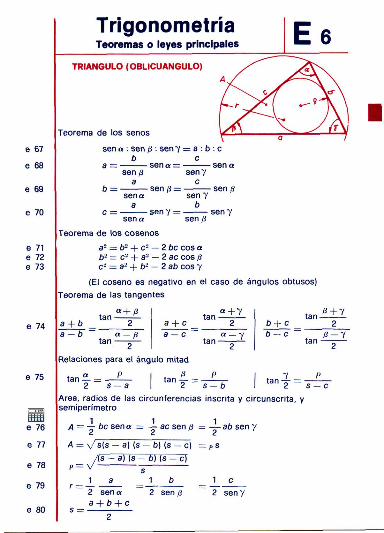
TRIANGULO (OBLICUÁNGULO)
Teorema de los senos
sen a : sen fí : sen 7 = a :b:c b c
a = sen a = -sen/8 sen 7
sena - sen / } = - -sen ¡i
c = -
sen 7 b
• sen 7 = sen 7 sen/3 sena
Teorema de los cosenos
a- = b2 - f c- — 2 be eos a b2 = c2 + a2 — 2 ac eos p c2 = a- -f- b2 — 2 ab eos 7
{El coseno es negativo en el caso de ángulos obtusos) Teorema de las tangentes
a + b tan
a + ¡i
a-b tan a-11
tan a + 7
tan ■
Relaciones para el ángulo mitad
I' tan SL _ . 2 s — a
tan / i
b + c b — c
7
tan S + 7
tan i 8 - 7
2 - i ^ t I " " " 2 - 1
Área, radios de las circunferencias inscrita y circunscrita, y semiperímetro
A = -^ be sen a = — ac sen 0
<A = \ / s ( s - a) {s — b) (s —o)
/(s^ans~=W(s^rc~)
2 sena 1 b 2 sen /3
1
ab sen y
a + b + c 2 sen 7
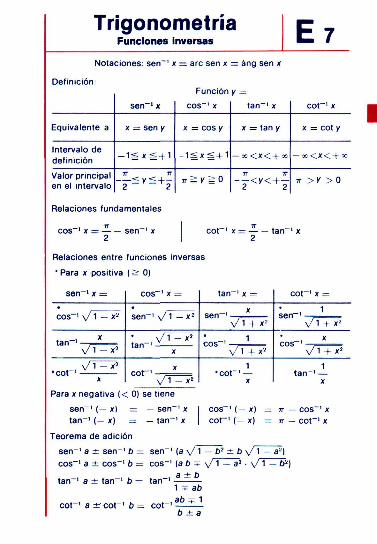
Trigonometría Funciones Inversas E7
Notaciones: sen ' x = are sen x = áng sen x
Definición:
Equivalente a
Intervalo de definición Valor principal en el intervalo
sen"1x
x = sen y
- 1 £ x £ + 1
7r n - - S V É + -
2 2
Función eos"'x
x = eos y
- l í i S + 1
i ^ r S O
y -tan"' x
x = tan y
— x < x < + x
7T 7T
cot"' x
x = cot y
- x < X < + x
TT >y > o
Relaciones fundamentales
eos ' x = sen -1 x 2
cot - ' x = tan - 1 x 2
Relaciones entre funciones inversas
■ Para x positiva ( a 0)
sen - 1x = ■ eos - ' \/1 - x2
. _, *
V i - * 2
X
eos"' x =
• sen - ' \ / 1 — x2
V 1 - x2
tan -1
X
m t - i ' v/1 - x 2
tan ' x =
_ , X
v"1 +x= " _, 1
V / 1 + X!
1 • cot ' —
X
cot ' x =
\ / 1 + x2
" -, x
\ / 1 + x 2
1 tan -■ X
Para x negativa (< 0) se tiene sen"' (— x) = — sen"1 x I eos"' (— x) = ir — eos -1 x tan"1 (—x) = — tan"1 x | cot -1 (— x) = jr — cot -1 x
Teorema de adición sen"1 a ± sen"' b = sen ' (a \ / í — o2 ± £> V 1 — a2l eos - ' a ± eos"' b = eos - ' l a t í \J 1 — a2 ■ V 1 — b2)
a ± b tan ' a ± tan ' b = tan"
cot"1 a ± cot"1 b = cot
1 + ab , a b ^ 1
b ± a
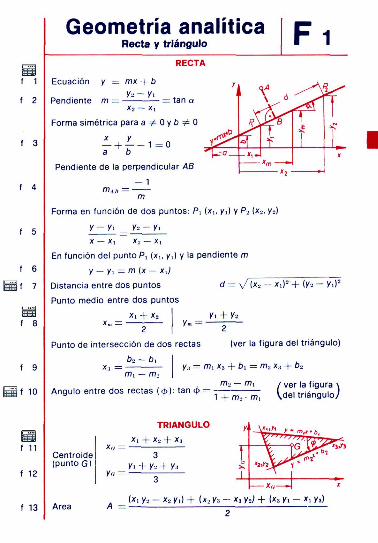
Geometría analítica Recta y triángulo Fi
Ecuación y = mx + b Y¿ - V\
Pendiente m = -
RECTA
: tan a
"\mra - * 1 -
\ i
f *m -
X
Xa — Xi
Forma simétrica para a ^ 0 y b # 0
x y
- + f - 1 = 0 a b
Pendiente de la perpendicular AB
- 1 Forma en función de dos puntos: P, (x,, yi) y P= (x^, y2)
y — yi _ Y!-Y¡
x — x, x2 — x,
En función del punto P, (x,, y,) y la pendiente m
y - y, = m (x — x j _ _
Distancia entre dos puntos d = \ / ( x s — x,)'- + (y2 — y i ) :
Punto medio entre dos puntos
x, + x2 yi + y2
Punto de intersección de dos rectas (ver la figura del triángulo)
b-2~b,
f7)j — m-z y:, = m, x3 + b, = m2 x3 + b2
m 2 — mi / v e r la figura ' , , . . , " i j — m i / v e r la figura \ Ángulo entre dos rectas (<*>): tan <j> = - - ■ - — ( ^ t r ¡ á n g u l o j
T Centroide (punto G l
TRIANGULO
Xi + X2 + X:,
Ki + y= + y:.
(x, y,. - xa y,) + (x , y3 - x3 y?) + (x3 y, - x, y;
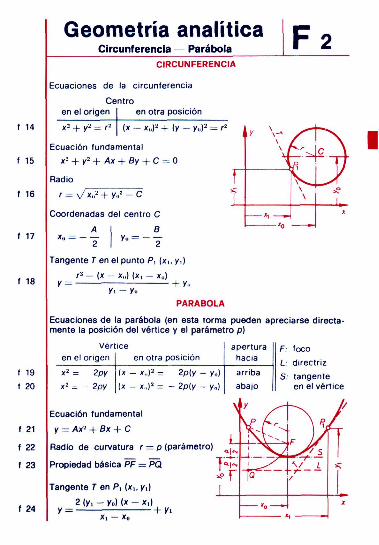
Geometría analítica Circunferencia — Parábola F2
CIRCUNFERENCIA
Ecuaciones de la circunferencia
Centro en el origen
x' + Y'
en otra posición
(x - x„)2 + (y - y„)2 = r2
Ecuación fundamental x2 + y2 + Ax + By + C = 0
Radio
Coordenadas del centro C
A x„ —
2
8
Tangente 7 en el punto P, (Xi, y,)
r2 — (x — x„) (x, — x„) y = h y,.
yi - y., PARÁBOLA
Ecuaciones de la parábola (en esta torma pueden apreciarse directamente la posición del vértice y el parámetro p)
Vértice en el origen
2py 2py
en otra posición
(x - x..)2
(x - x,,)2 2p(y - Yo)
2p(y - y»)
apertura hacia
arriba
abajo
F: foco
L directriz
S tangente en el vértice
Ecuación fundamental
y = Ax- + Bx + C
Radio de curvatura r = p (parámetro)
Propiedad básica PF = PQ
Tangente T en P, (x,. y,)
2 (yi - /o) (x - x,) y = 1- yi
Xi — Xo
i ,
1
.y ^ ~
V rr< 1\\"C
1 jrQ « .
1 A
^ \ t\/
^ / ¿ -/ / i
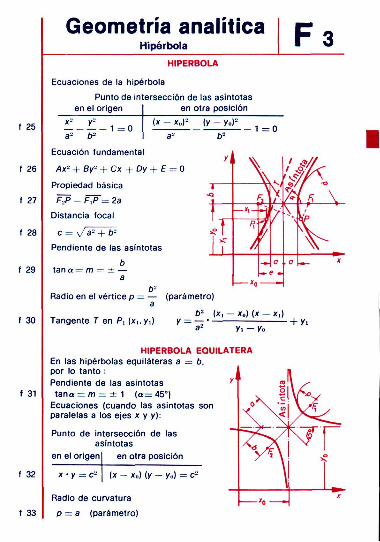
Geometría analítica Hipérbola F3
HIPÉRBOLA
Ecuaciones de la hipérbola
Punto de intersección de las asíntotas en el origen
x- y-— - 1 = 0
a- tP
en otra posición (x - x,,)- (K - Yo)'
a- b-
Ecuación fundamental
Ax* + By- + Cx + Dy + £ :
Propiedad básica
F~P - F~f = 2a
Distancia focal
c = \J a- + b-Pendiente de las asíntotas
tan a = m = ± — a
í>-Radio en el vértice p = — (parámetro)
a b- (x, — x„) (x — x,)
Tangente T en P, (x,, y,) Y = — ' 1-y, a- Y\ — Yo
HIPÉRBOLA EQUILÁTERA En las hipérbolas equiláteras a = b, por lo t a n t o : Pendiente de las asíntotas
t ana = m = ± 1 ( a = 45°) Ecuaciones (cuando las asíntotas son paralelas a los ejes x y y):
Punto de intersección de las asíntotas
en el origen en otra posición
x • y = cJ x„) (y - y„) = c-
Radio de curvatura
p = a (parámetro)
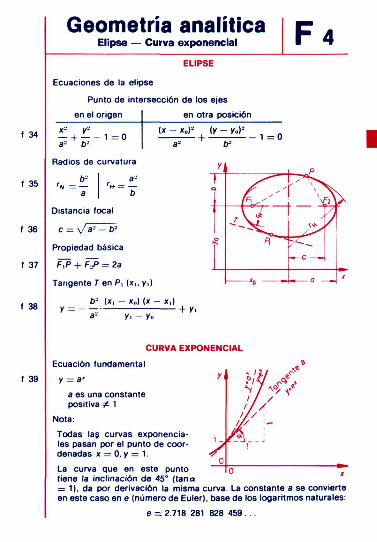
Geometría analítica Elipse — Curva exponencial F4
ELIPSE
Ecuaciones de la elipse
Punto de intersección de los ejes en el origen
x- y-_ + I-_1=0 a- fi
en otra posición
(x - x„)a [y - y„)J , „ a- b=
Radios de curvatura
b- 3-
Distancia focal
c = \ / a- — b-
Propiedad básica
F^P + FÍP = 2a
Tangente T en P, (x,. y,)
b- (x, - x„) (x - x,l y«
■ + v,
CURVA EXPONENCIAL Ecuación fundamental
y = a' a es una constante positiva / 1
Nota: Todas las curvas exponenciales pasan por el punto de coordenadas x = 0. y = 1. La curva que en este punto tiene la inclinación de 45° (tana = 1). da por derivación la misma curva. La constante a se convierte en este caso en e (número de Euler), base de los logaritmos naturales:
e = 2 718 281 828 459 . . .
y:
' > 0
1/ /
r •J
0
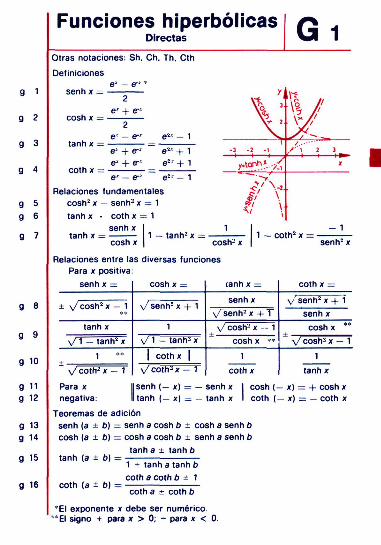
Funciones hiperbólicas I /> . Directas V 3 I
Otras notaciones: Sh. Ch, Th, Cth
Definiciones
senh x ^
cosh x =
tanh x =
coth x = e' - e" e2' - 1
Relaciones fundamentales cosh2 x — senh2 x = 1 tanh x • coth x = 1
senh x
e'
e'
e' e' e'
-2
+ 2
+ +
er"'
er'
er"
er' er'
e2' e 2 ' e2 '
- 1
+ 1 + 1
tanh x = ■ cosh x
1 - tanh2 x = cosh2 x senh2 x
Relaciones entre las diversas funciones Para x positiva:
senh x =
± v/cosh2x — 1
tanh x V 1 - tanh2 x
1 " V coth2 x - 1
cosh x =
\ /senh2x + 1
1 V 1 - tanh2 x
| coth x | V coth2 x - 1
<anh x =
senh x Y' senh2 x + 1 V'cosh2 x — 1
cosh x »» 1
coth x
coth x =
V senh2 x + í senh x
cosh x ** V cosh2 x - 1
1 tanh x
IIsenh ( - x) = — senh x 1 cosh (— x) = + cosh II tanh ( - x) = — tanh x I coth (— x) = — coth
Para x negativa:
Teoremas de adición senh (a ± b) = senh a cosh b ± cosh a senh b cosh la ± b) = cosh a cosh b ± senh a senh b
tanh a ± tanh b tanh la ± b) = ■
coth la ± b) =
1 ± tanh a tanh b coth a coth b ± 1 coth a ± coth b
*EI exponente x debe ser numérico *EI signo + para x > 0, - para x < 0.
g 17
g 18 g 19
g 20
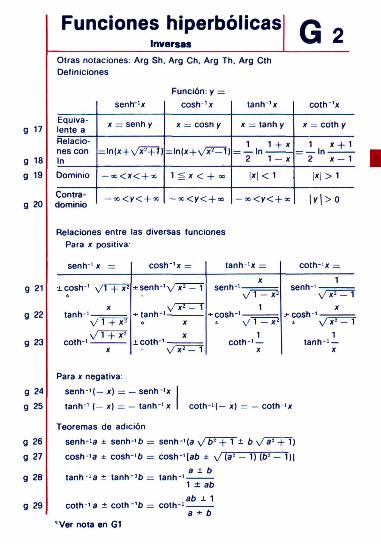
Funciones hiperbólicas Inversas G2
Otras notaciones: Arg Sh, Arg Ch. Arg Th. Arg Cth Definiciones
Equivalente a Relaciones con In Dominio
Contradominio
senh'x
x = senh y
=ln(x+v/?r:n)
- o c < x < + x
— 0 0 < y < + 5C
Función: y = cosh'x
x = cosh y
=ln(x+v/F=1)
1 S « < + oo
— x < y < + »
tanh'x
x = tanh y
1 1 + x 2 1 - x
M<1
- x < y < + »
cotlr 'x
x = coth y
1 x + 1 = — I n — —
2 x - 1
M>1
| y | > 0
g 21
g 22
g 23
g 24
g 25
g 26 g 27
g 28
g 29
Relaciones entre las diversas funciones Para x positiva.
senh-1 x =
±cosh-' \ /1 + x
X tanh
V T T ^
coth-V A T M 2
cosh'x =
±senh-'Vx2 — 1
:tanh-V ^ 5 ^ ^
: COtfl-
v*¿
tanh'x =
senh-s/T=*'
:COSh">-v/1 - x ;
coth-' —
coth-'x =
senh-
:C0Sh"
V*2- i
V x 2 - 1
tanh-' —
Para x negativa: senh-'(— x) = — senh-'x I tanh-1 ( - x) = - tanh-'x I coth->(- x) :
Teoremas de adición
coth-'x
senh-'a ± senh-'o = senh-'(a \/ b¿ + 1 ± 6 \¡ a1 + 1) cosh-'a ± cosh-'o = cosh-'|ab ± \/ (a2 - 1) (o2 — 1)]
a ± 6 tanh 'a ± tanh-'b = tanh-'
coth-'a ± coth-'b = coth-'
1 ± ab ab ± 1 a ± b
"Ver nota en G1
Cálculo diferencial Relación de cambio: Derivada Hi
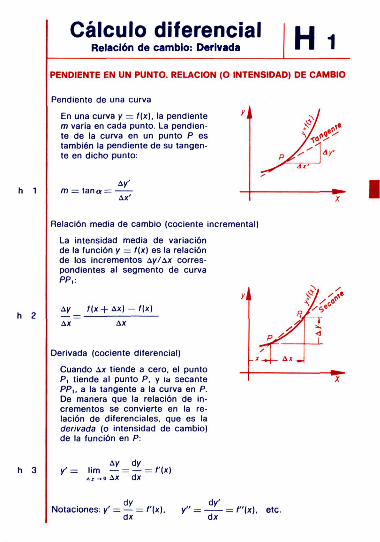
PENDIENTE EN UN PUNTO. RELACIÓN (O INTENSIDAD) DE CAMBIO
Pendiente de una curva
En una curva y = f(x), la pendiente m varía en cada punto. La pendiente de la curva en un punto P es también la pendiente de su tangente en dicho punto:
m = tana = -AV
Relación media de cambio (cociente incremental)
La intensidad media de variación de la función y = f(x) es la relación de los incrementos AV/AX correspondientes al segmento de curva PP,:
AX
f(x + A x ) - r ( x ) AX
Derivada (cociente diferencial)
Cuando AX tiende a cero, el punto P, tiende al punto P. y la secante PPi, a la tangente a la curva en P. De manera que la relación de incrementos se convierte en la relación de diferenciales, que es la derivada (o intensidad de cambio) de la función en P:
Ay úy lím - = - f = f'(x) i , - i i x dx
óy Notaciones: y' = — :
dx l'M. K " = dy-dx
■ t"(x), etc.
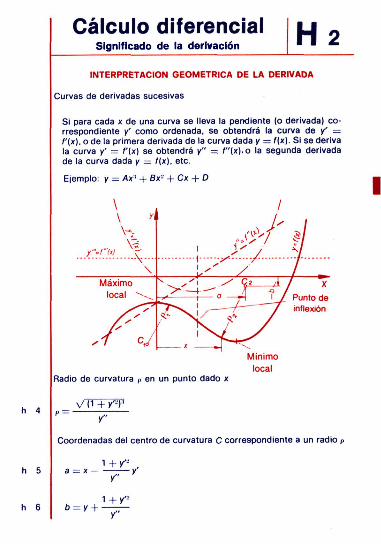
Cálculo diferencial Significado de la derivación H2
INTERPRETACIÓN GEOMÉTRICA DE LA DERIVADA
Curvas de derivadas sucesivas
Si para cada x de una curva se lleva la pendiente (o derivada) correspondiente y' como ordenada, se obtendrá la curva de y* = /'(x). o de la primera derivada de la curva dada y = t(x). Si se deriva la curva y' = t'{x) se obtendrá y" s t"{x).o la segunda derivada de la curva dada y = f{x), etc.
Ejemplo: y = Ax' + Bx- + Cx + D
Radio de curvatura ,. en un punto dado x
VW+VW'
Coordenadas del centro de curvatura C correspondiente a un radio ¡>
í> = y + -
V
1 +y=
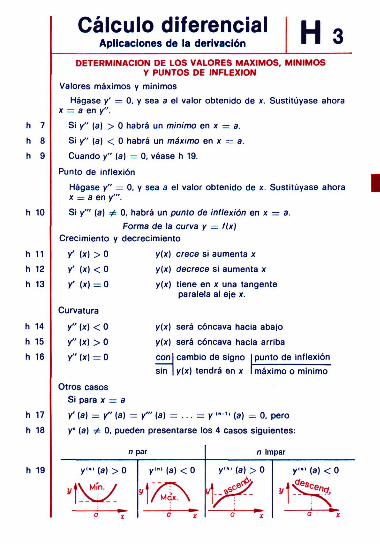
Cálculo diferencial Aplicaciones de la derivación Hs
DETERMINACIÓN DE LOS VALORES MÁXIMOS, MÍNIMOS Y PUNTOS DE INFLEXIÓN
Valores máximos y mínimos Hágase y' = 0, y sea a el valor obtenido de x. Sustituyase ahora
x = a en y". Si y" (a) > 0 habrá un mínimo en x = a. Si y" (a) < 0 habrá un máximo en x = a. Cuando y" (a) = 0. véase h 19.
Punto de inflexión Hágase y" = 0, y sea a el valor obtenido de x. Sustituyase ahora x = a en y"'.
Si y"' (a) ^ 0, habrá un punto de intlexión en x = a. Forma de la curva y = f(x)
Crecimiento y decrecimiento
Y~ (x) > 0 f (x )< 0 y- (x) = 0
Curvatura
y" (x) < 0
r (x) > 0
Y" (x) = 0
y(x) crece si aumenta x y(x) decrece si aumenta x y(x) tiene en x una tangente
paralela al e¡e x.
y{x) será cóncava hacia abajo y(x) será cóncava hacia arriba con | cambio de signo | punto de inflexión sin | y(x) tendrá en x I máximo o mínimo
Otros casos Si para x = a y- (a) = y" (a) = y"' (a) (a) = 0, pero y" (a) ?t 0, pueden presentarse los 4 casos siguientes:
n par
y " " (a) > 0
o 7
y1"1 (a) < 0
v\7S\ o * r
n impar
y '" ' (a) > 0
0 "x
y1"1 (a) < 0
O %
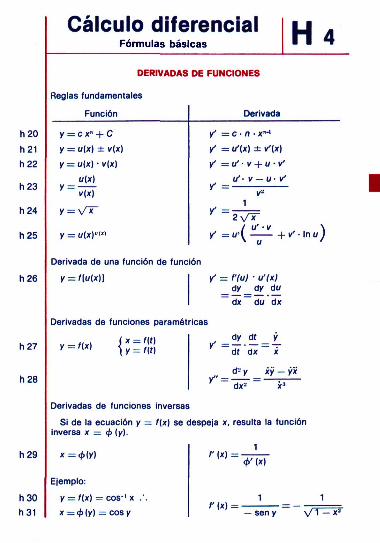
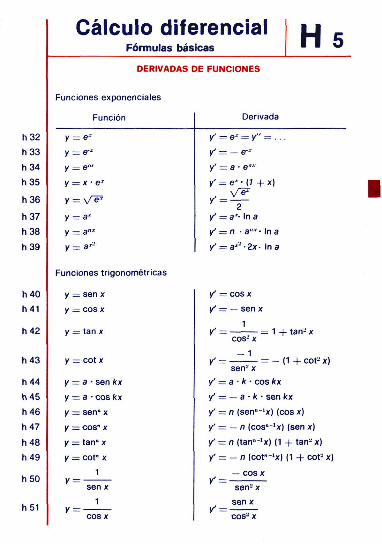
Cálculo diferencial Fórmulas básicas H4
DERIVADAS DE FUNCIONES
Reglas fundamentales
Función
y = cx' + C Y = u(x) ± v[x) Y = u(x) • v(x|
u(x)
Y = U{x)"<'>
Derivada
Y' = c • n ■ x"-1
Y" = i/(x) ± ir-(x) y" = ! / • v + u • v"
!/• V — U- V Y - v
1 r 2V~¡r
1 1/ -V Y" = u\ H x u
-
- / • I n u )
Derivada de una función de función
y = f[u(x)] dy dy du
— dx — du dx
Derivadas de funciones paramétricas
r-« {;:!g dy df y ~ dt dx — x
d"J y xy — yií ~~ dx- i "
Derivadas de funciones inversas
Si de la ecuación y = f[x) se despeia x, resulta la función inversa x = <¡> (y).
x =<*,(*)
Ejemplo:
Y = /(x) = eos-' x .'. x = <f> (y) = eos Y
1
1 1 — sen y v / 1 - x J
Cálculo diferencial Fórmulas básicas
DERIVADAS DE FUNCIONES
Funciones exponenciales
Función
y = e'
y = er'
y = e"
y = x • e*
y = \fe*
y = a'
y = a"'
y = a'-
Funciones tr igonométr icas
y = sen x
y = eos x
y = tan x
y = cot x
y = a • sen fcx
y = a • eos kx
y = sen"x
y = eos" x
y = tan" x
y = cot" x
1
sen x
1
c o s x
Derivada
y' — e' = y" = . . .
/ = - e-'
y' = a • e°*
y' = e* • (J + x)
"' = — y" = a'- In a
y' = n ■ a"" - In a
y' = a*2 -2x- In a
y' = eos x
y' = — sen x
1 y' -- 1 1
cos -x
- 1 1/ — 1
sen- x
tí
Hs
1 + cot2 x)
y' = a ■ k ■ eos kx
/ = — a • k ■ sen (ex
y* = n (sen"- 'x) (eos x)
y' = — n (cos"~'x) (sen x)
y' = n ( tan"- 'x) (1 + tan2 x)
y1 = — n (cot"- 'x) (1 + cot- x)
— c o s x Y —
sen- x sen x
y* c o s - x
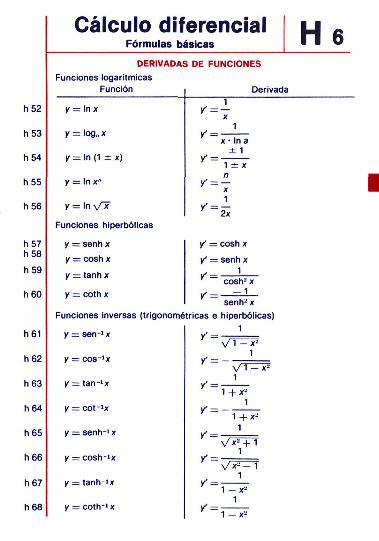
Cálculo diferencial Fórmulas básicas He
DERIVADAS DE FUNCIONES Funciones logarítmicas
Función Derivada
y = Inx
y = log„x
y = In (1 ± x)
y = In x"
y = In \/~x
Funciones hiperból
y = senh x y = cosh x
y = tanh x
y = coth x
Funciones inversas
y = sen-' x
y = cos-'x
y — tan-'x
y = cot-'x
y = senh-1 x
y = cosh-'x
y = tanh-'x
y = coth-'x
1 X
1 i - *
x • Ina ± 1
i / ■ * 1 ± x
n y = —
X
<=í cas
y" = cosh x
y' = senh x , . 1
cosh2 x r" _ 1
senh2 x (trigonométricas e hiperbólicas)
1 V —
V 1 - x-1
y> —
1 ir7 — " - 1 + x 2
1 " ~ 1 + x2
1 r =
Vx* + 1 1
V7 — \ / x 2 - 1 1
i l *
> 1 - x > 1
/ = -. r 1 - x -
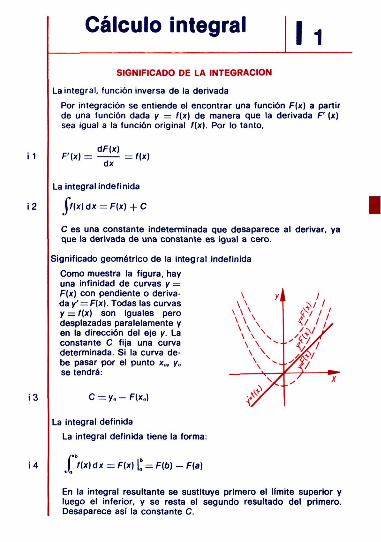
Cálculo integral
SIGNIFICADO DE LA INTEGRACIÓN
La integral, función inversa de la derivada Por integración se entiende el encontrar una función F(x) a partir de una función dada y = f{x) de manera que la derivada F (x) sea igual a la función original f(x). Por lo tanto,
dF(x) P(x) = — — = f(x)
dx
La integral indefinida
J*r(x)dx = F(x) + C
C es una constante indeterminada que desaparece al derivar, ya que la derivada de una constante es igual a cero.
Significado geométrico de la integral indefinida Como muestra la figura, hay una infinidad de curvas y = F(x) con pendiente o derivada y" = F(x). Todas las curvas y = í(x) son ¡guales pero desplazadas paralelamente y en la dirección del eje y. La constante C fija una curva determinada. Si la curva debe pasar por el punto x,„ y„ se tendrá:
C = y0 - F(x„)
La integral definida La integral definida tiene la forma:
.(' /(x)dx = F(x) I. = F(í>) - F(a)
En la integral resultante se sustituye primero el limite superior y luego el inferior, y se resta el segundo resultado del primero. Desaparece así la constante C.
¡5
¡6
¡7
¡8
i 9
i 10
¡11
i 12
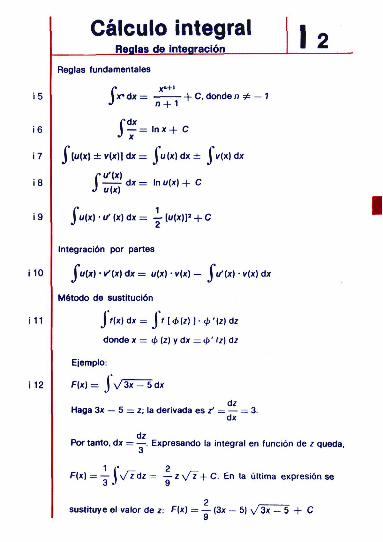
Cálculo integral Reglas de integración 12
Reglas fundamentales
r x"+' 1 x» dx = 1- C, donde n^ — 1 J n + '\
fdx 1 — = In x + C
•> X
1 [u(x) ± v(x)] dx = J u(x) dx ± j v(x) dx
rW(x) —— <Jx = In u(x) + C
J ü(X)
Ju(x) ■ W (x) dx = - 1 [u(x)]2 + C
Integración por partes
1 u(x) • i^(x) dx = u(x) • v(x) — 1 u'(x) ■ v(x) dx
Método de sustitución
J f (x )dx = j f [4>(z ! ]< /> ' (z )dz
donde x = $ (z) y dx = <¿>' Iz) dz
Ejemplo:
F (x )= J V 3 x - 5 d x
dz Haga 3x — 5 = z. la derivada es z' = — = 3.
dx
dz Por tanto, dx = —. Expresando la integral en función de z queda,
1 í' /— 2 _ F(x) = — 1 v/z dz = — z V z + C. En la última e
■> sustituye el valor de z. F{x) = — (3x — 5) \J3x — í
xpresión se
+ c
i 13
i 14
I 15
i 16
i 17
i 18
i 19
i 20
i 21
i 22
i 23
i 24
i 25
i 26
i 27
i 28
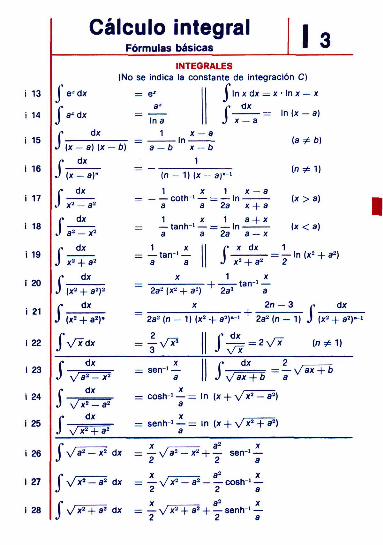
Cálculo integral Fórmulas básicas l 3
s i h
e'dx
a'dx
INTEGRALES (No se indica la constante de integración C)
I In x dx = x • In x — x
J dx = I n ( x - a )
x — a
= eT
a' In a
dx 1 x —a - In -a) (x — b) a — b x — b
dx JO) (73a)'
J dx x2 - a2
J dx a1
s
1 ( n - 1 ) ( x - a r
1 x 1 x — a = coth1 — = — In -a 2a x + ¡
( a * b )
(n#1>
( x > a )
a2 — x-' dx
x2 + a2
dx a2)2
dx
1 x 1 a + x = —tanrr1 — = — In (x < a)
a a 2a a — x 1 x II c x dx 1
= — tan-1 — I = — In (x2 + a2) a a J x2 + a2 2 T
J d)
(x2 +
J 1 tan-1 —
2a2(x2 + a2) 2a3 a
(x2 + a2)-
J*\Axdx
+ ■ 2 n - 3
2 a 2 ( n - 1 ) (x2 + a2)-1 2a en — o p 2(n-1) J
dx (x2 + a 2 ) - 1
= T ^ J dx _
- — = 2 \ / í ( 0 * 1 )
J dx V a2 - x2
dx V x 2 - a 2
dx
I dx V a x + b a
= — V ax + 6
cosrr1 — = In (x + \ / x 2 - 3 2 ) a
J v/F + a2 senh1 — = in (x + \ / x 2 + a2)
a
a2 — x2 dx =
f \ / x 2 - a 2 dx =
— \/a2 — x2H sen-1 — 2 2 a x , a2 x — V x2 — a2 cosh-1 — 2 2 a
x2 + a2 dx — V x2 + a2 -| senh-1 — 2 2 a
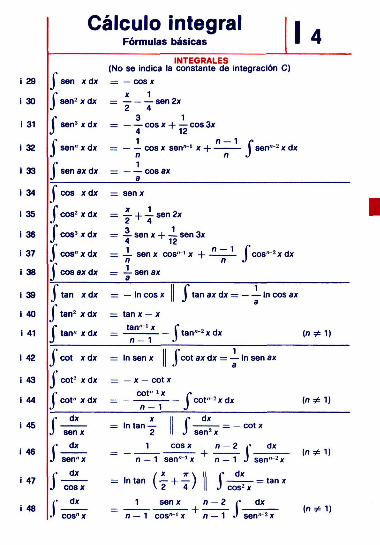
Cálculo integral Fórmulas básicas
| sen x dx
I sen2 x dx
i sen3 x dx
I sen"x dx
I sen ax dx
I eos x d x
| eos2 x dx
1 eos3 x dx
I e o s " x d x
| c o s a x d x
1 tan x d x
I tan2 x d x
I tan" x dx
I cot x dx
1 cot2 x d x
I cot" x dx
(• o* J senx
c d* J sen"x
(• d* J cosx
, dx
■' COS"X
l 4 INTEGRALES
(No se indica la constante de integración C) = — cosx
x 1 = sen 2x
2 4 3 1
= eos x H eos 3x 4 12 1 n - 1 r n n J
dx
1 = eos ax
a
= senx
= | + | s e n 2 x
= — sen x H sen 3x 4 ^ 1 2
= — senx eos'-1 x + - Í L ^ — I e o s " 2 x d x n n J
= — senax a
II f 1 = — In eos x | | l tan ax dx = In eos ax II j a
= tan x — x
_ , a n " " ' * f t a n - 2 x d x ( n ^ 1 ) n — 1 . '
II C 1 — In sen x 1 cot ax dx = — In sen ax
II J a
= — X — COt X
c o t " 1 x /• = 1 c o t " 2 x d x ( n # 1 )
n — 1 J x II (• dx 2 il J sen2x
1 eos x n — 2 f dx
n — 1 s e n " 1 x Í I - 1 J s e n " 2 x
ix ir \ || /• dx
" V 2 ' 4 / || J cos 2x
1 sen x n — 2 /* dx
n — 1 eos' -1 x n — 1 J s e n " 2 x
- I n í H
( n # D
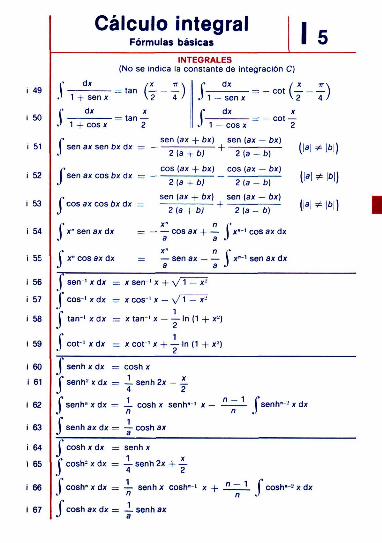
Cálculo integral Fórmulas básicas 1 5
INTEGRALES (No se indica la constante de integración C)
(7-7) = tan , + sen x \ 2 4
dx x = tan —
+ cosx 2
ÍT = — cot , - sen x \ 2
= — cot — 1 — eos x 2
sen (ax + bx) sen (ax — bx) sen ax sen bx dx = 1
2 (a + b) 2 (a - b)
eos (ax + bx) eos (ax — bx) sen ax eos bx dx = —
2 (a + b) 2 (a - b)
íl J / J " 2 (a + b> ' 2 (a - b) f x" n (■ I x" sen ax dx = eos ax -\ I x"-' eos ax dx J a a ■' r "" 1 c \ x" eos ax dx = — sen ax I x"-' sen ax dx J a a J
I sen-1 x dx = x sen ' x + V 1 — x-j eos' x dx = x eos1 x — \/1 — x-
(7-7)
eos ax eos bx dx sen (ax 4- bx) sen (ax — bx)
■ + ■
al # |6|)
a|^|b|)
tan1 x dx = x tan-' x In (1 + x-) 2
cot"1 x dx = x cot-' x H In (1 + x-)
senh x dx = cosh x senh- x dx = — senh 2x — _ 4 2 senh" x dx = — cosh x senh"-' x — I senh"- x dx ^ senh ax dx = — cosh ax cosh x dx ss senh x cosh- x dx = — senh 2x + —
/
cosh" x dx = — senh x cosh1 "-' x + " ~ 1 I cosh"- x ( n ■>
cosh ax dx = — senh ax a
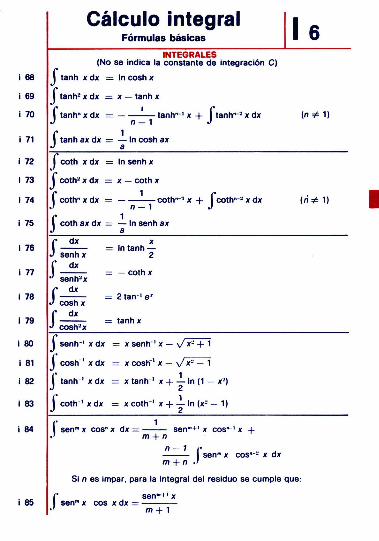
Cálculo integral Fórmulas básicas u
INTEGRALES (No se indica la constante de integración C)
tanh x dx = In cosh x
tanh2 x dx = x — tanh x
tanh" x dx = — n - 1
;«< • tanh»-1 x + I tanh»-2 x dx
1 tanh ax dx = — In cosh ax
(n*1)
coth x dx — In senh x
coth2 x dx = x — coth x J I coth"xdx = coth"-1 x + f coth"-2xdx
I coth ax dx = — In senh ax
(0*1)
senhx dx
senh2x dx
coshx r dx
J cosh2x
In tanh — 2
— coth x
2 tan-' e*
tanhx
I senh ' x dx = x senh"1 x — \/x- + 1
J cosh"1 x dx = x cosh"1 x — \/ x- — 1
i tanh"1 x dx = x tanh ■ x H In (1 — x-)
I coth"1 x dx = x coth"1 x -\ In (xs — 1)
sen™ x eos" x dx = -m + n
n- 1
sen~+'x eos" 'x +
sen"x eos"2 x dx m + n
Si n es impar, para la integral del residuo se cumple que:
sen"*1x sen" x eos x dx :
m + 1
Cálculo integral Aplicaciones de la integración 1 7
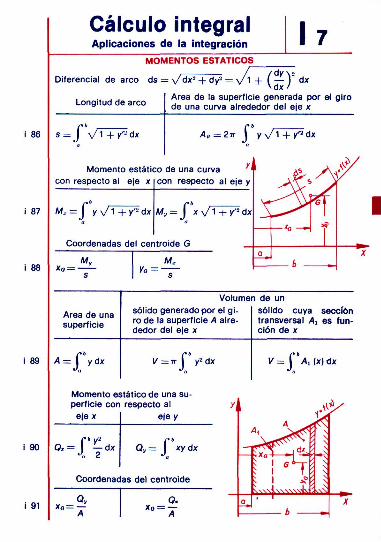
MOMENTOS ESTÁTICOS
Diferencial de arco ds = y/dx' + dy- = y 1 + í — Y i r o a i-Ja l o c n n o r f i r i n
Longitud de arco
dx
i 86 s = j V 1 + y'2 dx
Área de la superficie generada por el giro de una curva alrededor del eje x
A„ = 2ir J ' y x / l + y'2 dx
Momento estático de una curva con respecto al eje x
i 87
i 88
M ■ =¡YVT + y- dx
con respecto al eje y
M, ; = fxV
Coordenadas del centroide G
x„ = M„ s
Vn = M,
= s
Área de una superficie
i 89 "f ydx
sólido generado por el gi ro de la superficie A aire dedor del e¡e x
Volumen de un sólido cuya sección transversal A, es función de x
"«-X' y2dx y = j " / M x ) d x
Momento estático de una superficie con respecto al eje x eje y
i 90
i 91
= f? dx Q,= f xydx Ja 2
Coordenadas del centroide
x „ = -
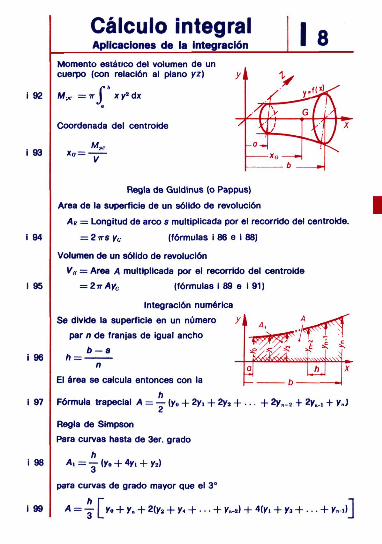
Cálculo integral Aplicaciones de la integración 18
Momento estático del volumen de un cuerpo (con relación al plano yz)
M„z = T I x y* dx
Coordenada del centroide
Regla de Guldinus (o Pappus) Área de la superficie de un sólido de revolución
AR = Longitud de arco s multiplicada por el recorrido del centroide. = 2 7rs y o (fórmulas i 86 e i 88)
Volumen de un sólido de revolución VR = Área A multiplicada por el recorrido del centroide
= 2irAye (fórmulas i 89 e i 91)
Integración numérica Se divide la superficie en un número Y¡
par n de franjas de igual ancho b-a
h = -
El área se calcula entonces con la
Fórmula trapecial A = — (y„ + 2y, + 2y2 + .. + 2v„_2 + 2v„_, + y j
Regla de Simpson Para curvas hasta de 3er. grado
* i = — iy« + tyi Yti
para curvas de grado mayor que el 3°
A = — [ y. + y. + 2(yü + y< + ■ • ■ + y.-3) + 4(y, + y3 + . . . + y..,)J
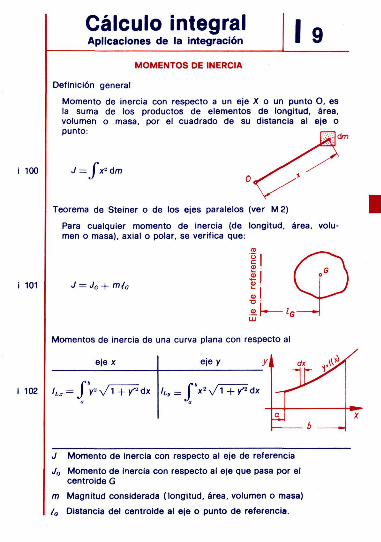
Cálculo integral Aplicaciones de la integración 19
MOMENTOS DE INERCIA
Definición general
Momento de inercia con respecto a un eje X o un punto O, es la suma de los productos de elementos de longitud, área, volumen o masa, por el cuadrado de su distancia al eje o punto:
X x2 dm
Teorema de Steiner o de los e¡es paralelos (ver M2)
Para cualquier momento de inercia (de longitud, área, volumen o masa), axial o polar, se verifica que:
J = Jc+ "1/c
Momentos de inercia de una curva plana con respecto al
eje x
h* = J Y' y/l + Y"<lx
eie y
,=JW 1 + K'2 dx
J Momento de inercia con respecto al eje de referencia Ja Momento de inercia con respecto al e¡e que pasa por el
centroide G m Magnitud considerada (longitud, área, volumen o masa) (0 Distancia del centroide al eje o punto de referencia.
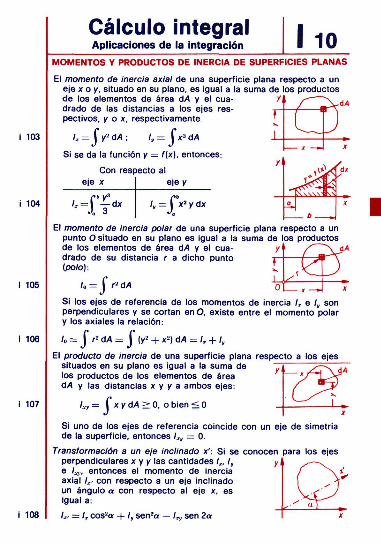
Cálculo integral Aplicaciones de la integración I 10
MOMENTOS Y PRODUCTOS DE INERCIA DE SUPERFICIES PLANAS
El momento de inercia axial de una superficie plana respecto a un eje x o y. situado en su plano, es igual a la suma de los productos de los elementos de área ÚA y el cua- / ( drado de las distancias a los ejes respectivos, y o x, respectivamente
l,= \ y'dA; / „ = (x-dA
Si se da la función y = f{x), entonces:
Con respecto al eie x
H;Í dx
e iey
/„=rv ydx
El momento de inercia polar de una superficie plana respecto a un punto O situado en su plano es igual a la suma de los productos de los elementos de área d * y el cuadrado de su distancia r a dicho punto (poto):
/„ ■S" r*dA
y f Y
~~\¿A
¿V Si los ejes de referencia de los momentos de inercia L e /„ son perpendiculares y se cortan en O, existe entre el momento polar y los axiales la relación:
/„ = f r"dA = j * (y' + x2) ÚA = h + I, El producto de inercia de una superficie plana respecto a los ejes
situados en su plano es igual a la suma de los productos de los elementos de área 1A y las distancias x y y a ambos ejes:
I, s xydA^Q, o bien í= 0 w Si uno de los ejes de referencia coincide con un eje de simetría de la superficie, entonces /,, = 0.
Transformación a un eje inclinado x': Si se conocen para los ejes perpendiculares x y y las cantidades l„ /, y¡¡ e /jy, entonces el momento de inercia axial !,■ con respecto a un eje inclinado un ángulo a con respecto al eje x, es igual a:
lx. ss I, cosaa + /, sen2<* — /,, sen 2a
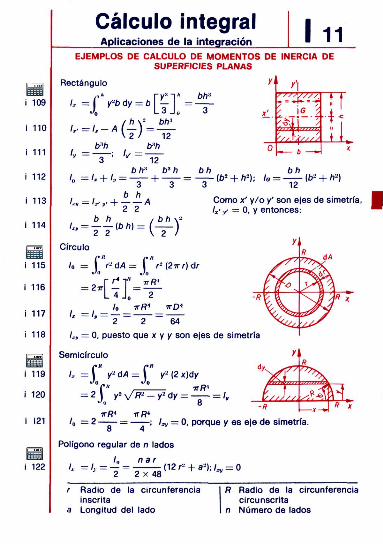
Cálculo integral Aplicaciones de la integración I 11
EJEMPLOS DE CALCULO DE MOMENTOS DE INERCIA DE SUPERFICIES PLANAS
Rectángulo y.
i h \ a _ bh* \ T / _ _ ¡2~ I* =L-A
b'h b:<h I, = ; V
3 12 b h" £>s h '.='. + '. = — + — = -
_ b h
b b / bh \*
'~=77(i"" = (—) Círculo
/o = f r»d/l = ("V(27r/-)dr «/O Jo
1 sL.l~.Jt~}.. i
'//yk//// 'j¡j£$¿a¿ i-U
b h •(b2 + n2); /„ = •
bb T2" (b2 + b2)
Como x' y / o y' son ejes de simetría / . . y = 0, y entonces:
/* = / ,= /o i r « 4 w D 4
T — 2 ~ 64
/ „ = 0, puesto que x y y son ejes de simetría
Semicírculo
I, . = r y2d/\ = f" y2(2x)dy
= 2 ) y2 VR2 - r <Jy = — - = /, •'0 8 TTR< irfí<
l0 = 2 ——- = ; ln = 0, porque y es eje de simetría 8 4
Polígono regular de n lados
I, = / v = /„
2 x 48 - (12^+ »*);>.,
r Radio de la circunferencia inscrita
a Longitud del lado
R Radio de la circunferencia circunscri ta
n Número de lados
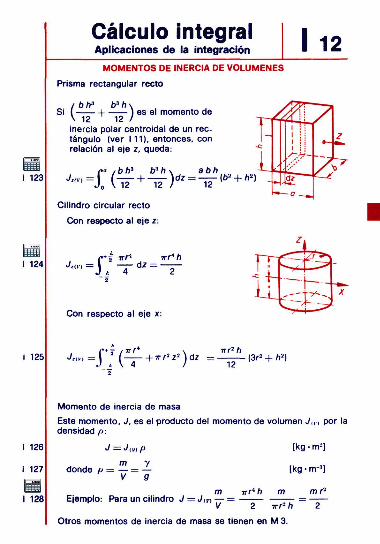
Cálculo integral Aplicaciones de la integración I 12
MOMENTOS DE INERCIA DE VOLÚMENES
Prisma rectangular recto
/ bh" b3h\ Si I 1 1 es el momento de
V 12 12 / inercia polar centroidal de un rectángulo (ver 111). entonces, con relación al eje z, queda:
Jt(n — abh / 1 W = (/>2 + h2)
, V 12 12 I 12 ^
Cilindro circular recto Con respecto al eje z:
^ í ( r ) :
J * 4 ~ Z
Con respecto al eje x:
^=Sl(zr+'rlz')áz irr'h ■ (3rJ + h!)
Momento de inercia de masa Este momento. J. es el producto del momento de volumen Jm por la densidad f>.
donde p
J = J,„p m y
~ ~v~7 Ejemplo: Para un cilindro J = Jm — =
V 2
[kg-m2]
[kg • m :1]
irr* h m mr-■jrr-b
Otros momentos de inercia de masa se tienen en M 3.
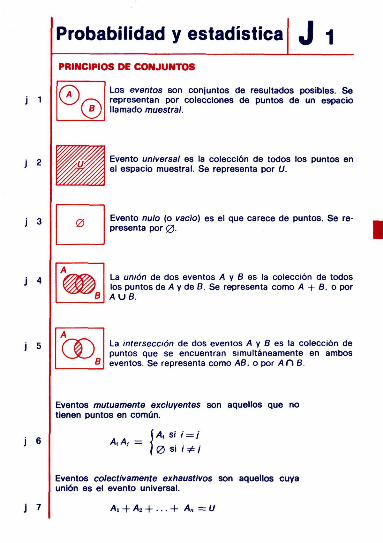
Probabilidad y estadística Ji PRINCIPIOS DE CONJUNTOS
©
0
CE).
Los eventos son conjuntos de resultados posibles. Se representan por colecciones de puntos de un espacio llamado muestral.
Evento universal es la colección de todos los puntos en el espacio muestral. Se representa por U.
Evento nulo (o vacio) es el que carece de puntos. Se representa por 0 .
La unión de dos eventos A y B es la colección de todos los puntos de A y de B. Se representa como A + 8, o por AUB.
La intersección de dos eventos A y 6 es la colección de puntos que se encuentran simultáneamente en ambos eventos. Se representa como AB. o por AC\ B.
Eventos mutuamente excluventes son aquellos que no tienen puntos en común.
At A, ( A si / = / | 0 si i' * /
Eventos colectivamente exhaustivos son aquellos cuya unión es el evento universal.
Ai + A» + . . . + A„=U
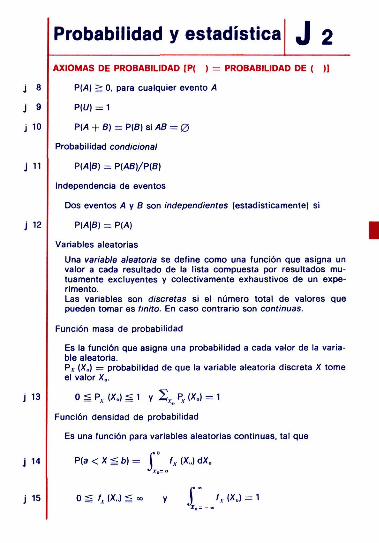
Probabilidad y estadística AXIOMAS DE PROBABILIDAD [P( ) = PROBABILIDAD DE ( )]
P(/\) a 0, para cualquier evento A
P(ü) = 1
P(A + B) = P(6) si AB = 0
Probabilidad condicional
P[A\B) = P[AB)/P{B)
Independencia de eventos
Dos eventos A y 6 son independientes (estadísticamente) si
P{A\B) = P{A)
Variables aleatorias Una variable aleatoria se define como una función que asigna un valor a cada resultado de la lista compuesta por resultados mutuamente excluyentes y colectivamente exhaustivos de un experimento. Las variables son discretas si el número total de valores que pueden tomar es finito. En caso contrario son continuas.
Función masa de probabilidad
Es la función que asigna una probabilidad a cada valor de la variable aleatoria. Px (X„) = probabilidad de que la variable aleatoria discreta X tome el valor X„.
O í P , (X.) £ 1 y Xx<¡ Px (X„) = 1
Función densidad de probabilidad
Es una función para variables aleatorias continuas, tal que
P(a < X 5 b) = ( f x (X„) dX„
0 S fx (X„) S oo r ',(*„)
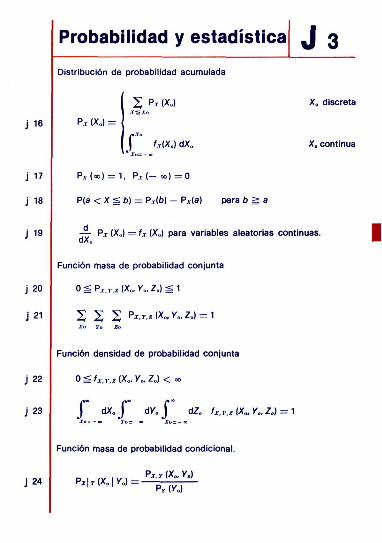
j i e
j "
j 18
j 19
j 20
j 21
j 22
j 23
J 2 4
Probabilidad y estadística Ü3 Distribución de probabilidad acumulada
I X Px <*°> X ° discreta
P.v (XJ = |
I f MX„)dX„ X0 continua
P.v(oo) = 1 . P, ( - oo) = 0
P(a < X g i>) = P.v(b) - P.v(a) para b^a
~ P.v (X„) = tz (X„) para variables aleatorias continuas. dX„
Función masa de probabilidad coniunta
0 S P j , u l X . . f . . ¿ l g 1
* o Yo Zo
Función densidad de probabilidad conjunta
0S/x.r.í(X..V'„.Z.) < oo
f dX.f d/0J dZ„ í2,M(X,l',ZJs1 J:*: -» ros-» -r«=-»
Función masa de probabilidad condicional.
Px y (X„. /„) Px\ y (X„ I y.) = 1 Pr(V.
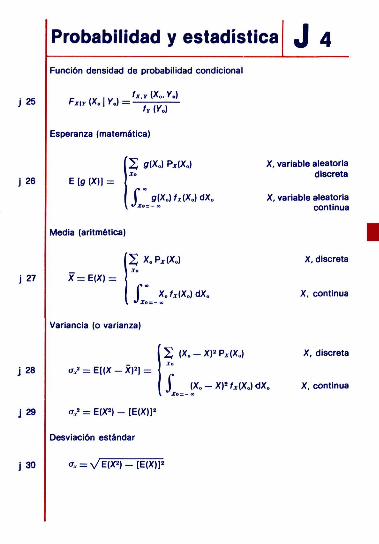
j 25
j 26
j 27
j 28
J29
j 30
Probabilidad y estadística Ü4 Función densidad de probabilidad condicional
Esperanza (matemática)
( S * | P A I X, variable aleatoria 1 *° discreta
E[g(X)] =
1 f g(X„) MX„) dX„ X, variable aleatoria \Ji.=-. continua
Media (aritmética)
( S X.P,(X„) X, discreta
X = E(X)= r" _ I f X„ MX„) dX„ X, continua
Variancia (o varianza)
í X (*• - *>2 p j (x») *• discuta <tf = E[(X - X)*] = J T°
[ I (X„ - X)2 MX0) dX„ X. continua
o* = EfX2) - (E(X)]2
Desviación estándar
o> = VE(X2 ) - [E(X) ]=
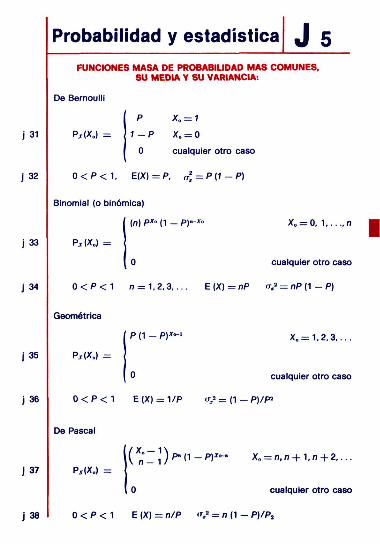
j 31
j 32
j 33
J34
j 35
j 36
J 37
j 38
Probabilidad y estadística Js FUNCIONES MASA DE PROBABILIDAD MAS COMUNES,
SU MEDIA Y SU VARIANCIA:
De Bernoulli
í P X„ = 7
P,(X„) = \ l - P Xo = 0
I 0 cualquier otro caso
0 < P < 1 , E(X)=P. ,rf = P ( 7 - P )
Binomial (o binómica)
( (n) Px- (1 - P)"-*• X„ = 0, 1 n
P (Xo) = l
| 0 cualquier otro caso
0 < P < 1 n = 1,2,3,... E (X )=nP oi= = n P ( 1 - P )
Geométrica
j P ( 1 _ P ) ^ i X„ = 1.2.3,...
P.r(X„) =
\ 0 cualquier otro caso
0 < P < 1 E (X) = 1/P cr.» = (1 - P)/P*
De Pascal
l ( °~ J) P" (1 - P)*~ X„ = n.n + 1, n + 2.... PÍ (X„ ) =
l 0 cualquier otro caso
0 < P < 1 E (X) = n/P <',* = n (1 - P)/P,
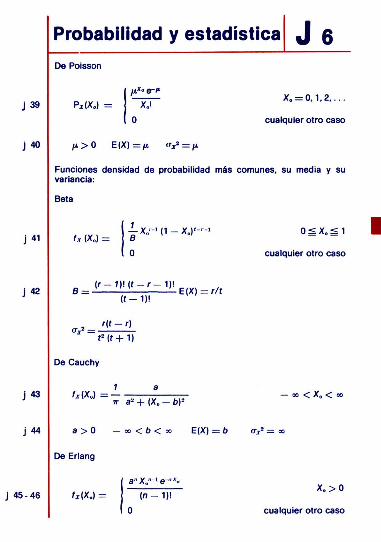
j 39
j 40
J41
j 42
J43
j 44
j 45-46
Probabilidad y estadística Je De Poisson
PA(X„) =
u.1» e-í4
^ X„ = 0,1.2. . . . X„!
0 cualquier otro caso
^ > 0 E(X)=/x <V = f i
Funciones densidad de probabilidad más comunes, su media y su variancia:
Beta
fx (XJ = — X0'-' (1 - X„)'- '- ' 0 S X . S 1 D
0 cualquier otro caso
( r - 7 ) ! ( r — r—1)1 B = - — E(X) = r/t
( t - D !
r[t - r) "i¿ = — -
t2(í + D
De Cauchy
MXJ = — 7T
a 3* + (X„ - ¿>F
- 00 < X 0 < 00
a > 0 — oo < b < oo E(X)=f> o*2 = a¡¡
De Erlang
MX„) = a"X„"-'e-«'..
( n - 1 ) l X o > 0
0 cualquier otro caso
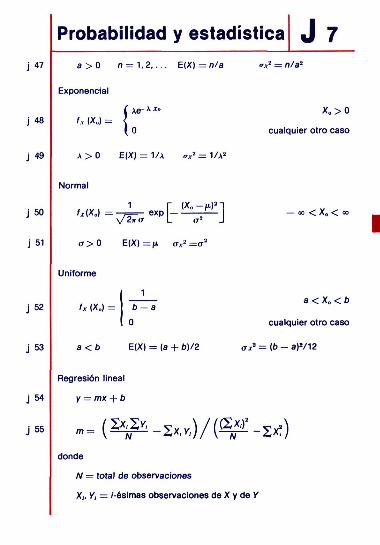
j 4 7
j 48
j 49
j 50
j 51
J 5 2
j 53
j M
j 55
Probabilidad y estadística J7 a > 0 n = 1,2.... E(X)=n/a <r.v2 = n/a*
Exponencial
í x e - * * ° X o > 0 / . v ( X „ ) = {
( 0 cualquier otro caso
A > 0 E(X) = 1/X „¿¿ = 1/A2
Normal
/ ÍY 1 1 „_r I^-H-)2! V2ir(r L <T2 J
- 00 < X 0 < 00
<r>0 E(X)=n <r.,2=<r2
Uniforme
ti (X„) = 1
b-a a < X0 < b
0 cualquier otro caso
a < b E(X) = (a + 6)/2 <r^2 = (b - a)V12
Regresión lineal
Y = mx + b
.-(»■*■-Ur)/{<**-X*) donde
W = total de observaciones
X„ / , = i-é simas observaciones de X y de Y
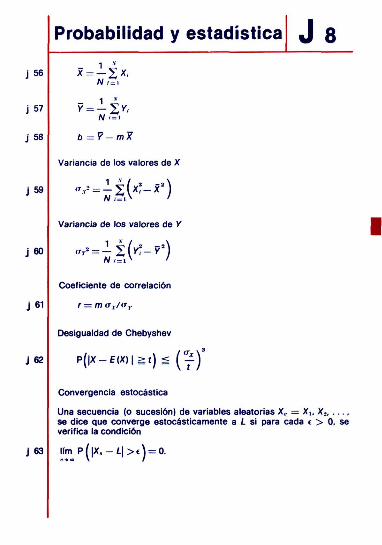
Probabilidad y estadística Ja j 56
j 57
j 58
J59
j 60
J61
j 62
x= — Vx, N S
1 v
Y = - ^ Y , N i = ■i
b=V-mX
Variancia de los valores de X
■V » I ¿ (*?-*•)
cia de los valores de
- ^ Í ( » f - F ' ) Variancia de los valores de Y
¡ 63
<r,
Coeficiente de correlación
r = m a ,/<r,.
Desigualdad de Chebyshev
p ( | X - £ ( X ) | a t ) SS ( í í ) '
Convergencia estocástica
Una secuencia (o sucesión) de variables aleatorias X„ — X,, X.., . . . , se dice que converge estocásticamente a L si para cada < > 0, se verifica la condición
lím ím p ( | X „ - L | > t ] = 0.
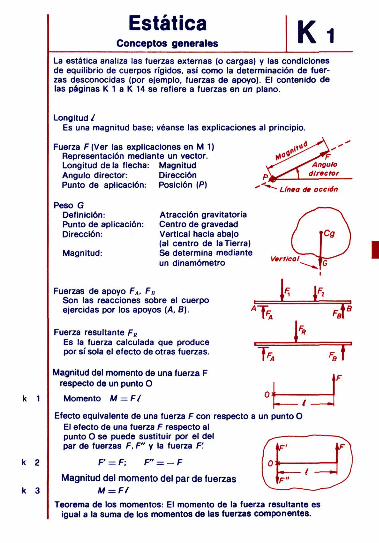
Estática Conceptos generales Ki
La estática analiza las fuerzas externas (o cargas) y las condiciones de equilibrio de cuerpos rígidos, así como la determinación de fuerzas desconocidas (por ejemplo, fuerzas de apoyo). El contenido de las páginas K 1 a K 14 se refiere a fuerzas en un plano.
Longitud / Es una magnitud base; véanse las explicaciones al principio.
Fuerza F(Ver las explicaciones en M 1) Representación mediante un vector. Longitud de la flecha: Magnitud Ángulo director: Dirección Punto de aplicación: Posición (P)
Peso G Definición: Punto de aplicación: Dirección:
Magnitud:
Atracción gravitatoria Centro de gravedad Vertical hacia abajo (al centro de la Tierra) Se determina mediante un dinamómetro
Fuerzas de apoyo FÁ. FB Son las reacciones sobre el cuerpo ejercidas por los apoyos [A, B).
Fuerza resultante F„ Es la fuerza calculada que produce por sí sola el efecto de otras fuerzas.
Magnitud del momento de una fuerza F respecto de un punto O
Momento M = Fl
Ts
Ta
°L/-J Efecto equivalente de una fuerza F con respecto a un punto O
El efecto de una fuerza F respecto al punto O se puede sustituir por el del par de fuerzas F, F" y la fuerza P. ( fc'
F = F; F"--F Magnitud del momento del par de fuerzas
M = FI
Teorema de los momentos: El momento de la fuerza resultante es igual a la suma de los momentos de las fuerzas componentes.
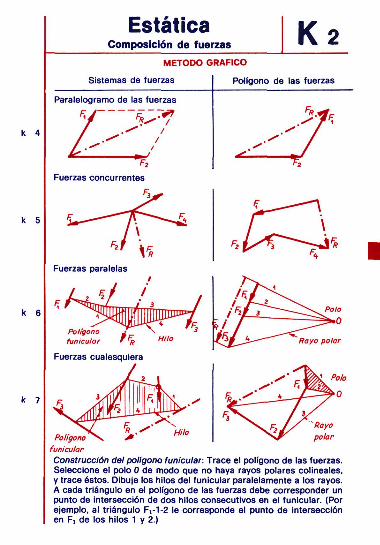
Estática Composición de fuerzas Ka
MÉTODO GRÁFICO
Sistemas de fuerzas
Paralelogramo de las fuerzas
1^7 %
Polígono de las fuerzas
,<r \
Fuerzas concurrentes
Fuerzas paralelas
Rayo Polígono " V . > ' " N ^ - polar
funicular Construcción del polígono funicular: Trace el polígono de las fuerzas. Seleccione el polo 0 de modo que no haya rayos polares colineales, y trace éstos. Dibuje los hilos del funicular paralelamente a los rayos. A cada triángulo en el polígono de las fuerzas debe corresponder un punto de intersección de dos hilos consecutivos en el funicular. (Por ejemplo, al triángulo Fi-1-2 le corresponde el punto de intersección en F, de los hilos 1 y 2.)
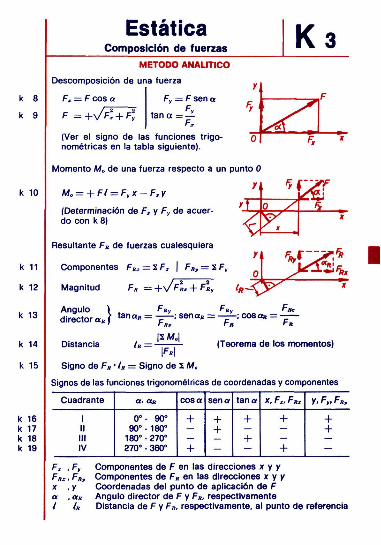
Estática Composición de fuerzas K3
MÉTODO ANALÍTICO
Descomposición de una fuerza
FX = F eos a
F =+V/FT+FJ
Fy = F sen a Fy
tan a = — F,
(Ver el signo de las funciones trigonométricas en la tabla siguiente).
Momento M„ de una fuerza respecto a un punto 0
oT F,
M, = + FI = FyX-F,y (Determinación de Fx y F„ de acuerdo con k 8)
Resultante F„ de fuerzas cualesquiera
Componentes F», = 5 F , | FJ¡y = SF i
Magnitud F„ = + V F L + FÍy
ñ 10 fe o
% r ^ l Ángulo director aK
Distancia
( Fu, FRy F¡
tana» = ; sena* = ; coso* = — FR3 FB F
/* = • (Teorema de los momentos)
Signo de Fs • /» = Signo de S M„
Signos de las funciones trigonométricas de coordenadas y componentes
Cuadrante
1 II III IV
a. ots
0°- 90° 90° -180°
180° - 270° 270° - 360°
cosa
+ — — +
sena
+ + _ -
tana
+ — + —
X, Fx. FK,
+ — — +
Y. F„ FR,
+ + — —
Fx , F„ Componentes de F en las direcciones x y y Fax. Fay Componentes de F» en las direcciones x y y x , y Coordenadas del punto de aplicación de F a , a» Ángulo director de F y F», respectivamente / ¡H Distancia de F y F», respectivamente, al punto de referencia
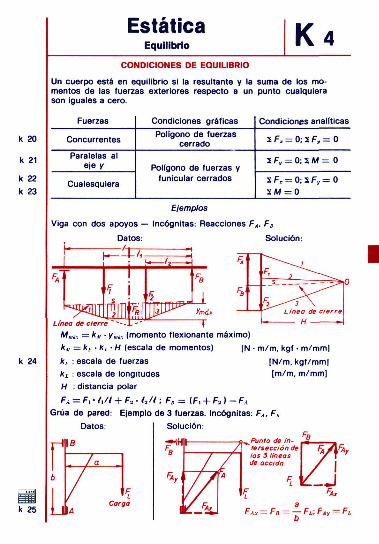
Estática Equilibrio K4
CONDICIONES DE EQUILIBRIO
Un cuerpo está en equilibrio si la resultante y la suma de los momentos de las fuerzas exteriores respecto a un punto cualquiera son iguales a cero.
Fuerzas Condiciones gráficas Condicionas analíticas
Concurrentes Polígono de fuerzas
cerrado S F, = 0; S Fy = 0
Paralelas al eje y
Cualesquiera
Polígono de fuerzas y funicular cerrados
S F„ = 0; S M = 0
S F, = 0; S Fy = 0 5 M = 0
Viga con dos apoyos -Datos: /-t—r-
E¡emplos
Incógnitas: Reacciones FA, F,
Solución:
- H
mea de cierre " " " - - J , ' *
"f I ¡£P^
T
F,
FB>
■
■
Lineo de cierre - H *-Línea t
M „ Í , = kM ■ / , „ „ (momento flexionante máximo) kM=k, • « j • H (escala de momentos) [N ■ m/m. kgf • m/mml kr : escala de fuerzas [N/m. kg t /mm| kL : escala de longitudes [m/m, m/mm]
H : distancia polar
FA = F,-/,/t + F.J-l.J/l: F„ = (F . + F . I - F J
Grúa de pared: Ejemplo de 3 fuerzas. Incógnitas: FA. F,
Datos: 'B
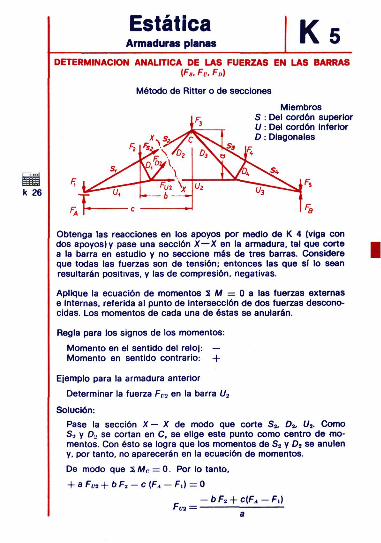
Estática Armaduras planas Ks
DETERMINACIÓN ANALÍTICA DE LAS FUERZAS EN LAS BARRAS [Fs, Fc, FD)
Método de Rltter o de secciones
Miembros S : Del cordón superior U : Del cordón inferior D: Diagonales
Obtenga las reacciones en los apoyos por medio de K 4 (viga con dos apoyos) y pase una sección X—X en la armadura, tal que corte a la barra en estudio y no seccione más de tres barras. Considere que todas las fuerzas son de tensión; entonces las que si lo sean resultarán positivas, y las de compresión, negativas.
Aplique la ecuación de momentos S M = 0 a las fuerzas externas e internas, referida al punto de intersección de dos fuerzas desconocidas. Los momentos de cada una de éstas se anularán.
Regla para los signos de los momentos: Momento en el sentido del reloj: — Momento en sentido contrario: +
Ejemplo para la armadura anterior Determinar la fuerza F ra en la barra U2
Solución: Pase la sección X — X de modo que corte S2, D2, l/2. Como S-j y D. se cortan en C, se elige este punto como centro de momentos. Con ésto se logra que los momentos de S2 y D2 se anulen y, por tanto, no aparecerán en la ecuación de momentos. De modo que 2 Mc = 0. Por lo tanto, + a F„2 + b F-. - c (FA - F,) = 0
-bF¡ + c{FÁ-F1) Fv2 — -
a
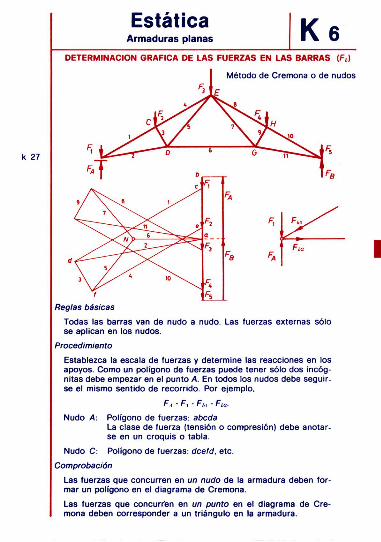
Estática Armaduras planas Ke
DETERMINACIÓN GRÁFICA DE LAS FUERZAS EN LAS BARRAS (F„)
Método de Cremona o de nudos
Reglas básicas
Todas las barras van de nudo a nudo. Las fuerzas externas sólo se aplican en los nudos.
Proced/m/ento Establezca la escala de fuerzas y determine las reacciones en los apoyos. Como un polígono de fuerzas puede tener sólo dos incógnitas debe empezar en el punto A. En todos los nudos debe seguir. se el mismo sentido de recorrido. Por ejemplo,
F, - F, - Fu - Fm.
Nudo A: Polígono de fuerzas: abcda La clase de fuerza (tensión o compresión) debe anotarse en un croquis o tabla.
Nudo C: Polígono de fuerzas: dceld, etc.
Comprobación
Las fuerzas que concurren en un nudo de la armadura deben formar un polígono en el diagrama de Cremona.
Las fuerzas que concurren en un punto en el diagrama de Cremona deben corresponder a un triángulo en la armadura.
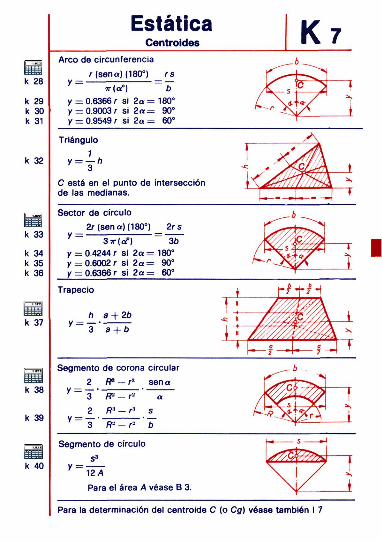
Estática Centroides K7
Arco de circunferencia r (sena) (180°) rs
~~b~ y = - T(a°) Y = 0.6366 r si 2a =180° y = 0.9003 r si 2a = 90° Y = 0.9549 r si 2a = 60°
Triángulo 7
Y = - h
C está en el punto de intersección de las medianas.
Sector de círculo 2r (sen a) (180°)
Y = -_Zrs
3TT(O°) ~~ 3b Y = 0.4244 r si 2a = 180° Y = 0.6002 r si 2a = 90° y = 0.6366 r si 2a = 60°
Trapecio
Y = -h a + Zb
a + b
Segmento de corona circular 2 3 2 T
R>-r* FP-r* R'-r3
R* - r-
Segmento de círculo
Y = S3
12/ '
sena a
s 6
Para el área A véase B 3
Para la determinación del centroide C (o Cg) véase también I 7
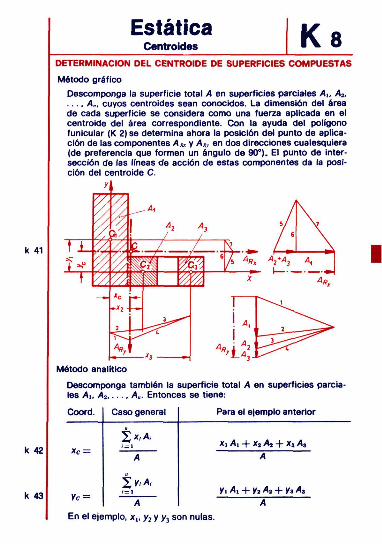
Estática Centroides Ka
DETERMINACIÓN DEL CENTROIDE DE SUPERFICIES COMPUESTAS Método gráfico
Descomponga la superficie total A en superficies parciales A,. A,. ..., An, cuyos centroides sean conocidos. La dimensión del área de cada superficie se considera como una fuerza aplicada en el centroide del área correspondiente. Con la ayuda del polígono funicular (K 2) se determina ahora la posición del punto de aplicación de las componentes A,,., y Am. en dos direcciones cualesquiera (de preferencia que formen un ángulo de 90°). El punto de intersección de las líneas de acción de estas componentes da la posición del centroide C.
Método analítico Descomponga también la superficie total A en superficies parciales Ai, A2 A„. Entonces se tiene:
Coord. Caso general Para el ejemplo anterior
%x,A
%V,A, Yc =
x¡A
YiA
+ x2A A
+ YiA
i + X¡A,
+ YtA,
En el ejemplo, x¡, y2 y y3 son nulas.
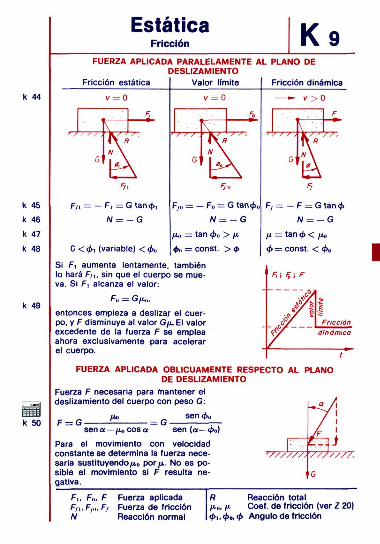
Estática Fr icción K9
FUERZA APLICADA PARALELAMENTE AL PLANO DE DESLIZAMIENTO
Fricción estática Valor limite Fricción dinámica
v = 0 v = 0 v > 0
ry i = ■ F, = Gtan<f>,
N = -G
C < 0 , (variable) <<£„
Fji) = — Fu = G tan</>,
N = -G
/ t „ = tan <£« > fí
<(>„ = const. > <t>
Ff= — F = Gtan<f>
N = -G
H r= tan tj> < ¡to
<f> = const. < <£0
Si F, aumenta lentamente, también lo hará F/u sin que el cuerpo se mueva. Si Ft alcanza el valor:
F„ = Gfi„ ,
entonces empieza a deslizar el cuerpo, y F disminuye al valor G¡x, El valor excedente de la fuerza F se emplea ahora exclusivamente para acelerar el cuerpo.
FUERZA APLICADA OBLICUAMENTE RESPECTO AL PLANO DE DESLIZAMIENTO
Fuerza F necesaria para mantener el deslizamiento del cuerpo con peso G:
F = G-f *> sen tf>,t
sen (a—<p») sena —¡u, c o s a
Para el movimiento con velocidad constante se determina la fuerza necesaria sust i tuyéndolo porp.. No es posible el movimiento si F resulta negativa.
Ft, F0, F Fuerza aplicada F¡x, Fjn, Ff Fuerza de fricción N Reacción normal
R Reacción total ¡í,,. ¡J. Coef. de fricción (ver Z 20) <í>i.<¡f>o. 4> Ángulo de fricción
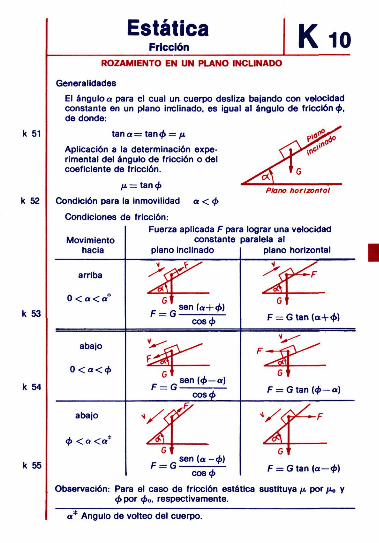
Estática Fricción K10
ROZAMIENTO EN UN PLANO INCLINADO
Generalidades El ángulo a para el cual un cuerpo desliza bajando con velocidad constante en un plano inclinado, es igual al ángulo de fricción <f>, de donde:
t a n a = tand> = ¡Í Aplicación a la determinación experimental del ángulo de fricción o del coeficiente de fricción.
/i = tan<£
Condición para la inmovilidad a < 4>
Condiciones de fricción:
Plano horizontal
Movimiento hacia
arriba
0 < o < a*
abajo
0<a<<¿>
abajo
<f> < a <a*
Fuerza aplicada F par constante
plano inclinado
Gt sen («+<£) r = u
eos?
sen (<p—a) F - G
cos<f>
*/<tf^ X G j
F =
/■
„sen (a-<£) 3
cos<¿>
i lograr una velocidad paralela al
plano horizontal
GI F = G tan [a+<f>)
G*
F = Gtan (<¿> — or)
X C
F = <
y"r r " i
3 tan (o—<(>)
Observación: Para el caso de fricción estática sustituya ¡i por /i« y <t> por <t>„. respectivamente.
a Ángulo de volteo del cuerpo.
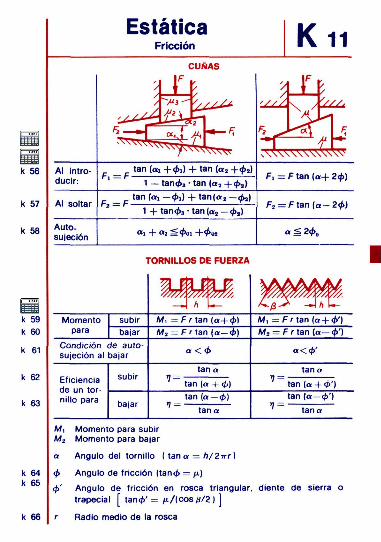
Estática Fricción K11
CUÑAS
£i
Al introducir: Ft
tan (o, +4>¡) + tan (a2 +</>2) 1 — tan&r tan [a2+<t>2)
Fl = F tan (a+ 2<f>)
Al soltar _ tan (ai — <t>¡) + tan(or2 — <fa)
1 -f tan<#>3 • tan (a3 — </>,) F2 = Ftan(a-2<¿)
Auto-sujeción «i + a¡¡S<£oi +<£.« «S2<í>o
TORNILLOS DE FUERZA
Momento para
subir bajar
Condición de auto-sujeción at bajar
Eficiencia
nillo para
subir
bajar
w7%'. h IJ
M, = F r t a n (a+<f)l M 2 = F r tan (a — <t>)
a<<t>
1 1 t a n a
an (a 4- 0 ) tan (a — <f>)
1 = — ; t a n a
^M W-M, = F r t a n (a + <<>') M 2 = F r tan (a— <£')
a<4>'
t a n a
tan (a + q>') tan (a — <£')
"! = t a n a
M, Momento para subir M-j Momento para bajar
a Ángulo del tornillo ( tana = h/Z-nr)
<(> Ángulo de fricción (tane/> = /i) <j> Ángulo de fricción en rosca triangular, diente de sierra o
trapecial [ tan<¿' = n/(cos/ j /2) ] r Radio medio de la rosca
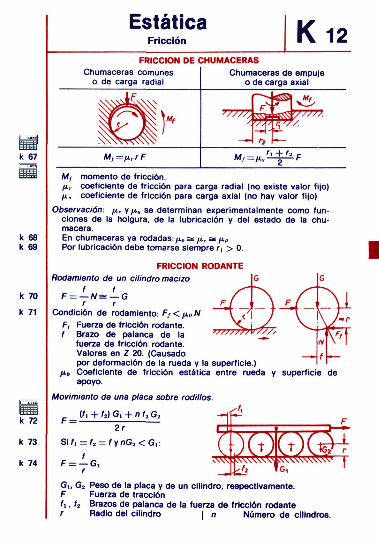
Estática Fricción K12
FRICCIÓN DE CHUMACERAS Chumaceras comunes
o de carga radial Chumaceras de empuje
o de carga axial
77777,
M¡~lxrrF M/=^<.—5—F
Mf momento de fricción. coeficiente de fricción para carga radial (no existe valor fijo) coeficiente de fricción para carga axial (no hay valor fijo)
Observación: (L, y ¡ía se determinan experimentalmente como funciones de la holgura, de la lubricación y del estado de la chumacera. En chumaceras ya rodadas: ¡J.,, ss ¡x, = Í fia Por lubricación debe tomarse siempre r, > 0.
FRICCIÓN RODANTE Rodamiento de un cilindro macizo
t f F = — Ne*—G
r r Condición de rodamiento: F / < / i , N
Ff Fuerza de fricción rodante. t Brazo de palanca de la
fuerza de fricción rodante. Valores en Z 20. (Causado por deformación de la rueda y la superficie.)
fi„ Coeficiente de fricción estática entre rueda y superficie de apoyo.
Movimiento de una placa sobre rodillos.
Vi + h) G, + n r2 G2 F = -2r a
S\h = fJ = fynG,<Gl:
F = — G> Jkfi M w * S i , G2 Peso de la placa y de un cilindro, respectivamente. F Fuerza de tracción f i . f% Brazos de palanca de la fuerza de fricción rodante r Radio del cilindro I n Número de cilindros.
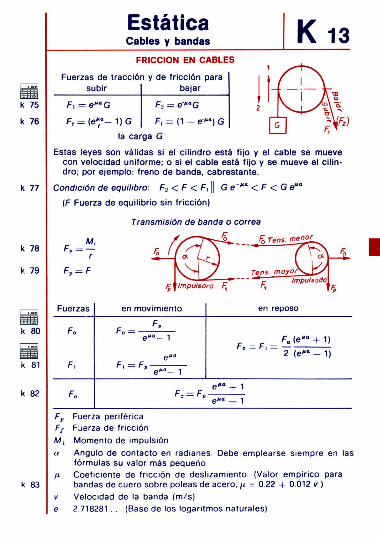
Estática Cables y bandas K13
FRICCIÓN EN CABLES
Fuerzas de tracción y de fricción para subir bajar
F, = e""G
F, = ( e 7 - 1 ) G
F; = e'»°G
Ff = (1 - e-»°) G
la carga G
Estas leyes son válidas si el ci l indro está fi jo y el cable se mueve con velocidad uniforme; o si el cable está fi jo y se mueve el ci l indro; por ejemplo: freno de banda, cabrestante.
Condición de equilibro: F, < F < F, || G e " " < F < G e "
(F Fuerza de equil ibrio sin fr icción)
F„ = -r
Transmisión de banda o correa
,íl F0 Tens. mew.
^ Tens. mayor ' ~* p impulsada
u Fuerzas
F„
F,
F„
en movimiento
r F' e"°- 1
e " F, = F „
e"°- 1
F„ =
F„
e" + 1
" e»° — 1
en reposo
2 (e»" - 1)
Fuerza periférica Fuerza de fricción Momento de impulsión Ángulo de contacto en radianes Debe emplearse siempre en las fórmulas su valor más pequeño Coeficiente de fricción de deslizamiento. (Valor empírico para bandas de cuero sobre poleas de acero, ¡i = 0.22 + 0 012 v ) Velocidad de la banda (m/s | 2.718281 . . . (Base de los logaritmos naturales)
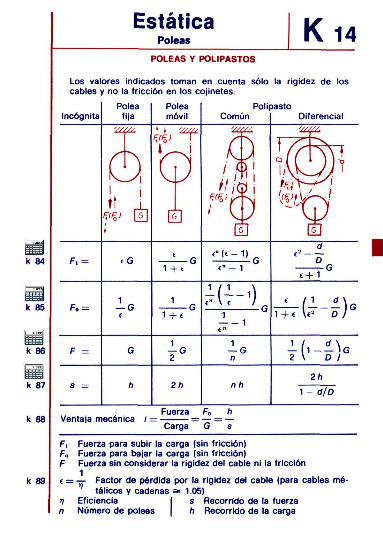
Estática Poleas K 14
POLEAS Y POLIPASTOS
Los valores indicados toman en cuenta sólo la rigidez de los cables y no la fricción en los cojinetes.
Incógnita Polea
fija Polea móvil
Polipasto Común Diferencial
'////s
Ó Q it É m
m H ¡0 i
F,. (G £ " ( < - ! )
1 +<
d
£ + 1
F.= 1
— G 7(7") 1 + €
1
_I_(±_£)0 1 + £ \c« D /
±(i-£\, 2 V D /
2/) 2h
1 - d/D
Ventaja mecánica / : Fuerza Carga
F, Fuerza para subir la carga (sin fricción) Fu Fuerza para bajar la carga (sin fricción) F Fuerza sin considerar la rigidez del cable ni la fricción
e = — Factor de pérdida por la rigidez del cable (para cables metálicos y cadenas m 1.05)
1 Eficiencia s Recorrido de la fuerza n Número de poleas Ai Recorrido de la carga
Cinemática Conceptos generales
GENERALIDADES
La cinemática estudia el movimiento de los cuerpos en función del tiempo.
Cantidades más importantes de la cinemática v sus unidades
Longitud i, ver K 1
Ángulo, ver E 1
Tiempo t Véanse las explicaciones al principio del libro. Unidades: s. min. h
Frecuencia f La frecuencia de una oscilación es el número de ciclos (alternaciones completas) por unidad de tiempo.
Número de oscilaciones / =
Tiempo de observación
Unidades: Hz (hertz) = c/s = 1/s (c = ciclo)
Periodo T El periodo es el tiempo en que se efectúa una oscilación (o rotación) completa Es el recíproco de la frecuencia.
1 r = — f
Unidades: s
Frecuencia de rotación o número de revoluciones por unidad de tiempo
La frecuencia de rotación de un cuerpo giratorio es la relación entre el número de vueltas o revoluciones y el tiempo de observación.
Número de revoluciones n =
Tiempo de observación
Unidades; 1/s. 1/min: rev/s, rpm.
El recíproco de n es la duración de cada vuelta o revolución. Si una oscilación o vibración está relacionada directamente con una rotación y sus periodos son iguales, entonces n = I.
Li
Cinemática Conceptos generales L2
Velocidad v La velocidad v es la primera derivada de la distancia recorrida s con respecto al tiempo t:
ds . v = — = s
di
Si la velocidad es constante en el tiempo se tiene:
s — t
Unidades: m/s, km/h
Velocidad angular <■>, frecuencia angular <u La velocidad angular o> es la primera derivada con respecto al tiempo del ángulo de giro o rotación:
d<t> ■ » = - = <*.
Si la velocidad angular es constante en el tiempo: o¡ = ±
t
En el caso en que t = n (ver/3) la velocidad angular oes igual a la frecuencia angular w
OJ = 2ir / = 2Trn = <£
Unidades: 1/8. rad/s
Aceleración a La aceleración a es la primera derivada de la velocidad v con respecto al tiempo t:
dv d2s a = — = v = = s
dt dt2
Unidades: m/s2, (km/h)/s
Aceleración angular a La aceleración angular a es la primera derivada de la velocidad angular <■> con respecto al tiempo í:
d<.) . _ d2<(> .. a~a7~'"~~o¥"~
Unidades: 1/s2, rad/s2
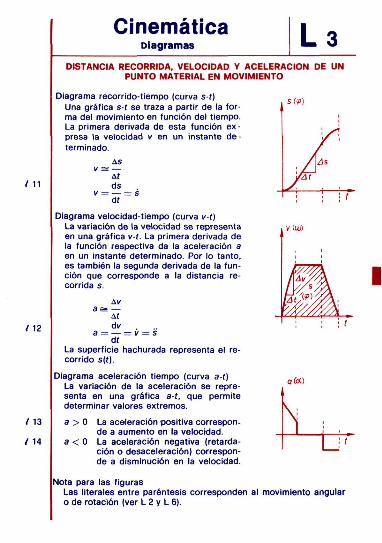
Cinemática Diagramas
DISTANCIA RECORRIDA, VELOCIDAD Y ACELERACIÓN DE UN PUNTO MATERIAL EN MOVIMIENTO
Diagrama recorrido-tiempo (curva s-f) Una gráfica s-f se traza a partir de la forma del movimiento en función del tiempo. La primera derivada de esta función expresa la velocidad v en un instante determinado.
&t ós
v = — = s dt
Diagrama velocidad-tiempo (curva v-t) La variación de la velocidad se representa en una gráfica v-t. La primera derivada de la función respectiva da la aceleración a en un instante determinado. Por lo tanto, es también la segunda derivada de la función que corresponde a la distancia recorrida s.
At dv . ..
a = — = v = s df
La superficie hachurada representa el recorrido s(f).
Diagrama aceleración tiempo (curva a-í) La variación de la aceleración se representa en una gráfica a l . que permite determinar valores extremos.
a > 0 La aceleración positiva corresponde a aumento en la velocidad.
a < 0 La aceleración negativa (retardación o desaceleración) corresponde a disminución en la velocidad.
s(v)
As /At
w, w m
afeo
1 Ü Nota para las figuras
Las literales entre paréntesis corresponden al movimiento angular o de rotación (ver L 2 y L 6).
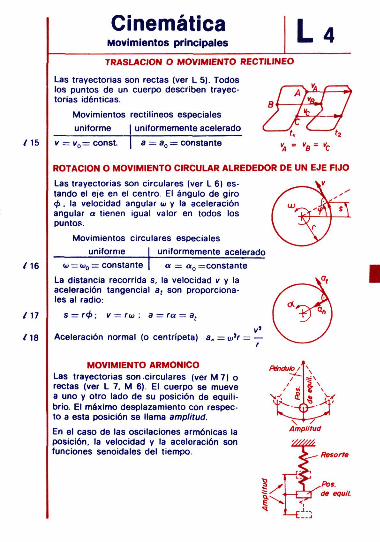
Cinemática Movimientos principales L4 TRASLACIÓN O MOVIMIENTO RECTILÍNEO
Las trayectorias son rectas (ver L 5). Todos los puntos de un cuerpo describen trayectorias idénticas.
Movimientos rectilíneos especiales uniforme | uniformemente acelerado
v = v„= const. a = a0 = constante "A = 'B ~ "c
ROTACIÓN O MOVIMIENTO CIRCULAR ALREDEDOR DE UN EJE FIJO Las trayectorias son circulares (ver L 6) estando el eje en el centro El ángulo de giro <f>. la velocidad angular u y la aceleración angular a tienen igual valor en todos los puntos.
Movimientos circulares especiales uniforme I uniformemente acelerado
<u = w 0 = constante | a = a0=constante La distancia recorrida s. la velocidad v y la aceleración tangencial a, son proporcionales al radio:
s = r<f>, v = ru : a = ra = a,
Aceleración normal (o centrípeta) a.
MOVIMIENTO ARMÓNICO Las trayectorias son circulares (ver M7) o rectas (ver L 7, M 6). El cuerpo se mueve a uno y otro lado de su posición de equilibrio. El máximo desplazamiento con respecto a esta posición se llama amplitud. En el caso de las oscilaciones armónicas la posición, la velocidad y la aceleración son funciones senoidales del tiempo.
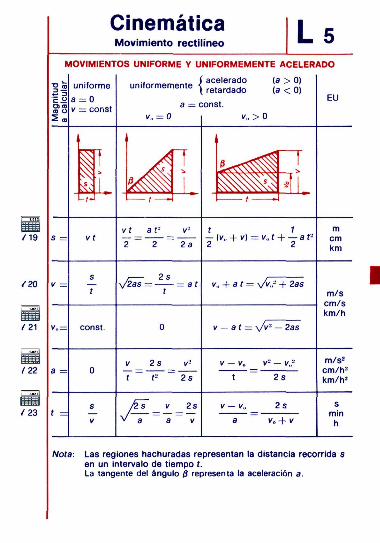
Cinemática Movimiento rectilíneo Ls
MOVIMIENTOS UNIFORME Y UNIFORMEMENTE ACELERADO
acelerado (a > 0) uniforme
a = 0 v = const
uniformemente ^ r e t a r d a d o ( a < 0 )
a = const. v„ = 0 v„>0
EU
I A ^ L-— 1 — -
^ í<$ ^ ^W
t
£
vt at- v-~2 ~ ~2~ " Ta
t 1 — (v„ + v) = v„ t -\ a f 2 2
m cm km
/ 2 s
/Zas = = a l t
/„ + at = \/v{;- + 2as m/s
cm/s km/h
I Í = \/v- — Zas
2s f-
V — V„ V- — V,;
2s 2s
m/s2
cm/h-km/h 2
s v 2s 2 s
Vo + V
s min
h
Nota. Las regiones hachuradas representan la distancia recorrida s en un intervalo de tiempo t. La tangente del ángulo B representa la aceleración a.
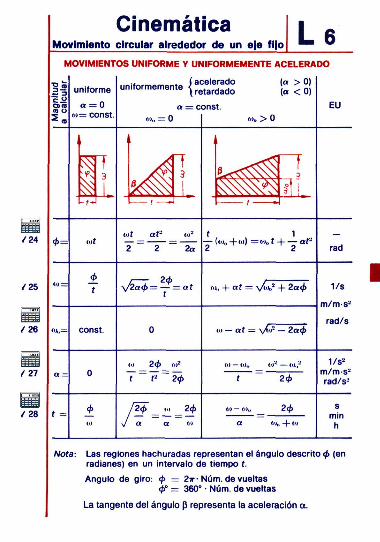
Cinemática Movimiento circular alrededor de un eje fijo Le
MOVIMIENTOS UNIFORME Y UNIFORMEMENTE ACELERADO
I uniforme
<* = 0 i » = c o n s t
uniformemente í acelerado \ retardado
a = const.
(a >0) (a <0)
<»„ = 0 Hk > 0 EU
^ 3
cut
~2 at-
2a
t 1 — (o>„ +<i)) =<•»„t -\ a í -2 2 rad
± t
I 2<¿ V2a<£= — - = a t „k, + a( = v^V* + 2or</
■ a i = v<»2 — 2a<¡>
1/s
m / m s 2
rad/s
2<p (<r
'¥~2^> o) — i»„ vr — <»>./
24> 1/s2
m/ms2
rad/s2
t = 2 * 2 * Oj,, + Oí
min h
Nota: Las regiones hachuradas representan el ángulo descrito <f> (en radianes) en un intervalo de tiempo t. Ángulo de giro: <p = 2v Núm. de vueltas
<jb° = 360° • Núm. de vueltas
La tangente del ángulo (5 representa la aceleración a.
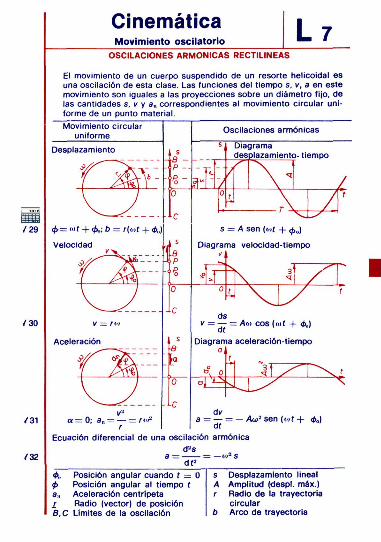
Cinemática Movimien to osci lator io L7
OSCILACIONES ARMÓNICAS RECTILÍNEAS
El movimiento de un cuerpo suspendido de un resorte helicoidal es una oscilación de esta clase. Las funciones del tiempo s, v, a en este movimiento son iguales a las proyecciones sobre un diámetro fi jo, de las cantidades s, v y a„ correspondientes al movimiento circular uniforme de un punto material.
Movimiento circular uniforme
Desplazamiento
(fy= wt + <£,; D = r (« f + 0„)
Velocidad
Oscilaciones armónicas
Diagrama desplazamiento- tiempo
s = A sen (oit -)- 0 j
Diagrama velocidad-tiempo
— = — / W s e n ( o í + <¡>0) dt
Ecuación diferencial de una oscilación armónica
a = = —o>3 s d i 2
*. 4> a» r S.C
Posición angular cuando t = 0 Posición angular al tiempo f Aceleración centrípeta Radio (vector) de posición Límites de la oscilación
s Desplazamiento lineal A Amplitud (despl. máx.) r Radio de la trayectoria
circular 6 Arco de trayectoria
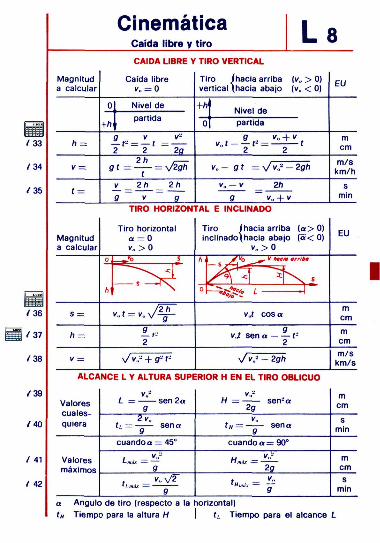
Cinemática Caída libre y tiro La CAÍDA LIBRE Y TIRO VERTICAL
Magnitud a calcular
/> =
v =
t =
0
Caída libre v„ = 0
Nivel de partida
+/i
2 2 2g 2/1 .
g t = = V2gh
v 2 / i 2 h
9 v g
Tiro /hacia arriba (v„ > 0) vertical (hacia abajo (v„ < 0)
+h 0
Nivel de partida
v„t-— f = — - — f 2 2
v„ — g í = \ / v„2 — 2gh
v„ — v 2h g v„ + v
EU
m cm
m/s km/h
s min
TIRO HORIZONTAL E INCLINADO
Magnitud a calcular
s =
h =
v =
0
Tiro horizontal a=0 v„ > 0
—Jo s ^ ^ ■ ^ ^ 1
, ( = , ^
2
> / * . * + 8 * P
Tiro (hacia arriba ( o > 0) inclinado (hacia abajo ( 5 < 0)
v„ > 0 h /fv0 ^ ^ . V fio cíe arriba
^ ^ -^"»,--" % - í
r —-ji ^ *
L r v.x eos a
g v,t sen a f-
2
^ '..- - 2g/ ?
EU
m cm
m cm m/s
km/s
ALCANCE L Y ALTURA SUPERIOR H EN EL TIRO OBLICUO
Valores cualesquiera
Valores máximos
v„-L = sen 2o
g 2v.,
tL = sen a 9
cuando a = 45°
g
9
v,r H = senaa
2g
tH — sen a g
cuando a = 90°
2g
9
m cm
s min
m cm s
min
a Ángulo de tiro (respecto a la horizontal) t j , Tiempo para la altura H tL Tiempo para el alcance
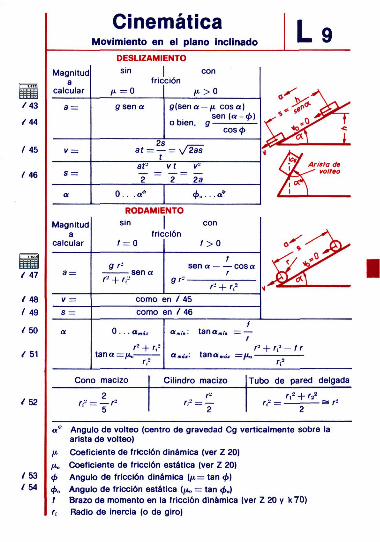
Cinemática Movimiento en el plano inclinado L9
DESLIZAMIENTO Magnitud
a calcular
a =
v =
s =
a
sin con fricción
/* = 0 ¡i > 0
gsen a g(sena — ¡i cosa) sen (a-<6)
cos<£ 2s ,
a i = — = \/2as t
at- vt v-
T " T~ Ja 0 . . . a * <t> a *
RODAMIENTO Magnitud
a calcular
a =
v = s =
a
sin fric
f = 0
g r-sena
'- + 'c
con ción
r > 0
t sen a eos a
r 9r~ ; ;
rJ + '? como en / 45 como en 1 46
0 . . . a..-,
'"■ + rf t a n a = / ^
**
f a „ / . : tana»,,-, = —
i
a mi,: tana,,,,-, = / t „
.</V Úx
ri'-tr
rr
Cono macizo
2 rf = — r-
5
Cilindro macizo
r-
Tubo de pared delgada
., r'! + '■? _, .. 2
a* Ángulo de volteo (centro de gravedad Cg vertlcalmente sobre la arista de volteo)
jtt Coeficiente de fricción dinámica (ver Z 20) l¿„ Coeficiente de fricción estática (ver Z 20) 4> Ángulo de fricción dinámica (¿t= tan <f>) <t>„ Ángulo de fricción estática i/i,,. = tan <¿>„) f Brazo de momento en la fricción dinámica (ver Z 20 y k 70) r¡ Radio de inercia (o de giro)
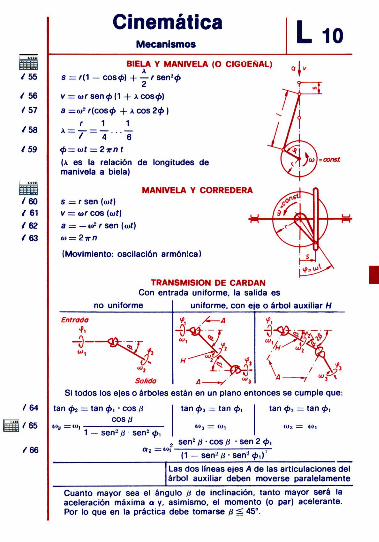
Cinemática M e c a n i s m o s L10
BIELA Y MANIVELA (O CIGÜEÑAL) s = f(1 — cos</)) H r sen-'</>
v = wr sen a> (1 + A cos</>)
a =<u2 r(cos<£ + A eos 2<f>)
_ ' 1 1
~T~~A " ¥ <j>=u>t = 2wnt (A es la relación de longitudes de manivela a biela)
MANIVELA Y CORREDERA s = r sen (<ut) v = <ar eos (car) a = —cursen (wt) 0 > = 27Tf)
(Movimiento: oscilación armónica)
TRANSMISIÓN DE CARDAN Con entrada uniforme, la salida es
no uniforme uniforme, con eje o árbol auxiliar H
Entrada
- o -r - ^ Si todos los ejes o árboles están en un plano entonces se cumple que
tan tf2 = tan <p, • eos ¡i eos /i
1 - sen2 ¡i ■ sen2 <j>,
tan <f>., = tan <p,
CÍÍ.I — 0)1
(1 -sen2f f -sen2(f t , )2
Las dos líneas ejes A de las articulaciones del árbol auxiliar deben moverse paralelamente
Cuanto mayor sea el ángulo fi de inclinación, tanto mayor será la aceleración máxima a y. asimismo, el momento (o par) acelerante. Por lo que en la práctica debe tomarse /3 tk 45°-
DÍ2 = V)¡
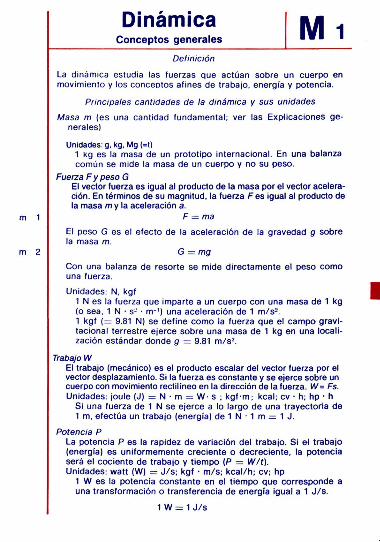
Dinámica Conceptos generales Mi
Definición La dinámica estudia las fuerzas que actúan sobre un cuerpo en movimiento y los conceptos afines de trabajo, energía y potencia.
Principales cantidades de la dinámica y sus unidades Masa m (es una cantidad fundamental; ver las Explicaciones ge
nerales!
Unidades: g. kg, Mg (=t) 1 Kg es la masa de un prototipo internacional. En una balanza común se mide la masa de un cuerpo y no su peso.
Fuerza Fy peso G El vector fuerza es igual al producto de la masa por el vector aceleración. En términos de su magnitud, la fuerza Fes igual al producto de la masa m y la aceleración a.
F = ma
El peso G es el efecto de la aceleración de la gravedad g sobre la masa m.
G = mg Con una balanza de resorte se mide directamente el peso como una fuerza. Unidades: N, kgf
1 N es la fuerza que imparte a un cuerpo con una masa de 1 kg (o sea, 1 N ■ s- • m-') una aceleración de 1 m/s2. 1 kgf ( = 9.81 N) se define como la fuerza que el campo gravi-tacional terrestre ejerce sobre una masa de 1 kg en una locali-zación estándar donde g = 9.81 m/s2.
Trabajo W El trabajo (mecánico) es el producto escalar del vector fuerza por el vector desplazamiento. Si la fuerza es constante y se ejerce sobre un cuerpo con movimiento rectilíneo en la dirección de la fuerza. W= Fs. Unidades: joule (J) = N ■ m = W- s ; kgf-m; kcal; cv • h; hp ■ h
Si una fuerza de 1 N se ejerce a lo largo de una trayectoria de 1 m, efectúa un trabajo (energía) de 1 N • 1 m = 1 J.
Potencia P La potencia P es la rapidez de variación del trabajo. Si el trabajo (energía) es uniformemente creciente o decreciente, la potencia será el cociente de trabajo y tiempo (P = W/t). Unidades: watt (W) = J/s; kgf • m/s; kcal/h; cv; hp
1 W es la potencia constante en el tiempo que corresponde a una transformación o transferencia de energía igual a 1 J/s.
1 W = U / s
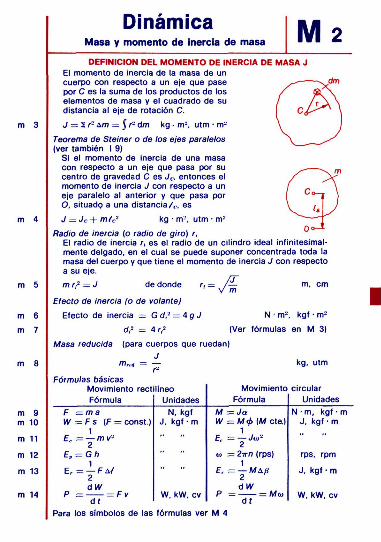
Dinámica Masa y momento de inercia de masa M2 DEFINICIÓN DEL MOMENTO DE INERCIA DE MASA J
El momento de inercia de la masa de un cuerpo con respecto a un eje que pase por C es la suma de los productos de los elementos de masa y el cuadrado de su distancia al eje de rotación C.
J = 2 r2 Am — £ r- úm kg ■ m-, utm • m-
Teorema de Steiner o de los e/es paralelos (ver también I 9)
Si el momento de inercia de una masa con respecto a un eje que pasa por su centro de gravedad C es Jc, entonces el momento de inercia J con respecto a un eje paralelo al anterior y que pasa por O, situado a una distancia/ , , es
J = J e 4- m/v- kg ■ m-, utm • m-
Radio de inercia (o radio de giro) r¡ El radio de inercia r, es el radio de un cilindro ideal infinitesimal-mente delgado, en el cual se puede suponer concentrada toda la masa del cuerpo y que tiene el momento de inercia J con respecto a su eje.
mrf = J de donde r, = /— V m
Electo de inercia ¡o de volante)
Efecto de inercia = G d,2 = 4 g J
(3 m, cm
d,2 = 4r,2
Masa reducida {para cuerpos que ruedan)
N • m2, kgf ■ m2
(Ver fórmulas en M 3)
kg, utm
Fórmulas básicas Movimiento rectilíneo Fórmula
F ^ma W =Fs (F = const.)
1 E. = — m v-
2 E, = Gh
E, = — F A/ 2 d IV
P = = Fv dt
Unidades N, kgf
J, k g f • m
"
W, kW. cv
Movimiento Fórmula
M = Ja W =M<t> (M cte l
1 E, = — Jm-
2 oí = 27rn (rps)
1 Er = - M ¿ / i
2 P = = Mu,
d i
circular Unidades
N ' m , k g f m J, k g f • m
rps, rpm
J, k g f ■ m
W, kW. cv
Para los símbolos de las fórmulas ver M 4
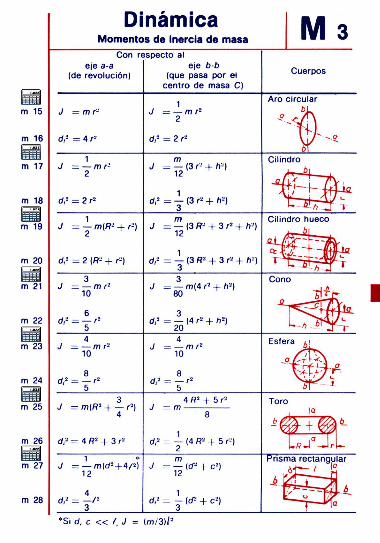
Dinámica Momentos de inercia de masa Ms
Con respecto al eie a-a
(de revolución) eje b-b
(que pasa por el centro de masa C)
Cuerpos
J = m /•'-'
d,2 =4r-
1 J = —mr 2
2
df = 2 r*
J = — mr-2
d,2 = 2 f
J = — (3 r-+/)=) 12
d,2 == — (3 /* + Al2)
Cilindro
J = — m(H- + r-) 2
d,2 = 2 (R2 + r-)
J = — (3 R- + 3 r2 + h-) 12
d,2 = — (3 FP + 3 r2 + h2) 3
Cilindro hueco Jn
j = — « i f !
10 J = —m(4r2 + h2)
80
d,2 = — (4 r2 + /i2) 20
Cono
4 Í J
J = — me2
10
8 d,2 = — r2
5
10
J = m(fí2 H r2) 4
d,2 = 4 R2 + 3 r2
4 R2 + 5 r2
d,2 = — (4 R2 + 5 r-] 2
Toro
T i u
Prisma rectangular J = —m(d2+4/2)
12
4 d,2 = — i"
3
j = _ ( d s + c S )
d,2 = - (d2 + c2)
*Si d. c « /.J = (m/3)/2
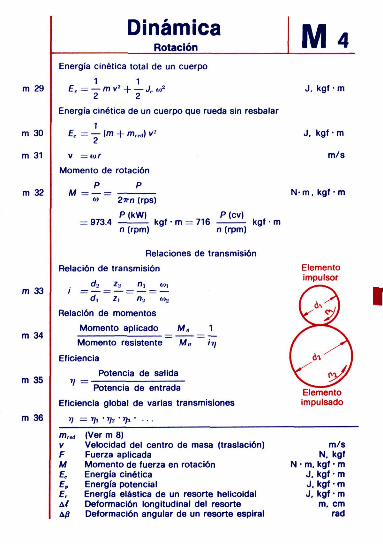
Dinámica R o t a c i ó n
Energía cinética total de un cuerpo
1 1 E, = — m v2 + — Jr „,2
2 2
Energía cinética de un cuerpo que rueda sin resbalar
1 Er = — (m + m„ a ) v-
v = « r
Momento de rotación
P P M
"> 2irn (rps)
P (kW) P (cv) = 973.4 kgf m = 716 kgf ■ m
n (rpm) n (rpm)
Relaciones de transmisión
Relación de transmisión
d-j z-j n t i»>i
tíi Zi n-j (tu
Relación de momentos
Momento aplicado M , 1
Momento resistente M« ir¡
Eficiencia
Potencia de salida
Potencia de entrada
Eficiencia global de varias transmisiones
V =yfV*'V»' ■■■
mrM (Ver m 8) v Velocidad del centro de masa (traslación) F Fuerza aplicada M Momento de fuerza en rotación f c Energía cinética Ep Energía potencial Er Energía elástica de un resorte helicoidal A / Deformación longitudinal del resorte A/3 Deformación angular de un resorte espiral
M4 J , kgf • m
J , k g f • m
m/s
N - m . kgf • m
Elemento impulsor
p>—*c 1 / \ V da )
V *%S Elemento impulsado
m/s N. kgf
N • m , k g f • m J , k g f • m J , k g f • m J , kgf • m
m. cm rad
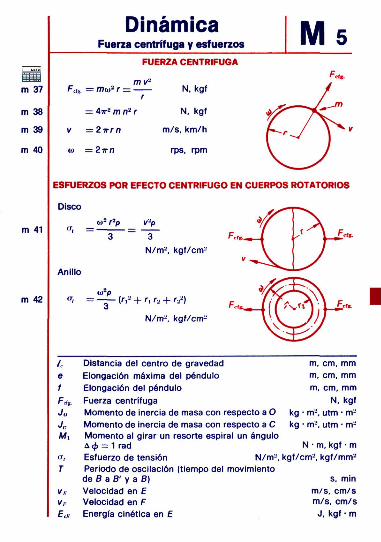
Fd
V
o}
Dinámica Fuerza centrífuga y esfuerzos
FUERZA CENTRIFUGA
. = m<¡¡¿ r = N, kgf r
= <\irimn*r N, kgf
= Zirrn m/s, k m / h
= 2wn rps, rpm
if r-V
Ms /
AC y Y' J ESFUERZOS POR EFECTO CENTRIFUGO EN CUERPOS ROTATORIOS
Disco
w 2 r2f> v-p
3 3 Fct*^ N/m 2 , kg f / cm 2
V
Anil lo
°i
1, e 1 Fjs. J„ Jo M,
tj¡
T
Va
v„ B,H
v>2p = - r - 1 ' - 3 + fi ^ + »V> F
3 ^ r f fc . N/m 2 , kg f / cm 2
Distancia del centro de gravedad Elongación máxima del péndulo Elongación del péndulo Fuerza centrífuga
Ypu Jv ^ ^ .
J)J
m, cm, mm m, cm, mm m, cm, mm
N, kgf Momento de inercia de masa con respecto a 0 kg • m2, utm • m2
Momento de inercia de masa con respecto a C kg • m2, utm ■ m2
Momento al girar un resorte espiral un A <f> = 1 rad Esfuerzo de tensión
ángulo N • m , k g f ■ m
N/m 2 , kg f /cm 2 , kg f /mm 2
Periodo de oscilación (tiempo del movimiento de S a B' y a 8) Velocidad en E Velocidad en F Energía cinética en E
s, min m/s , c m / s m/s , c m / s
J , k g f • m
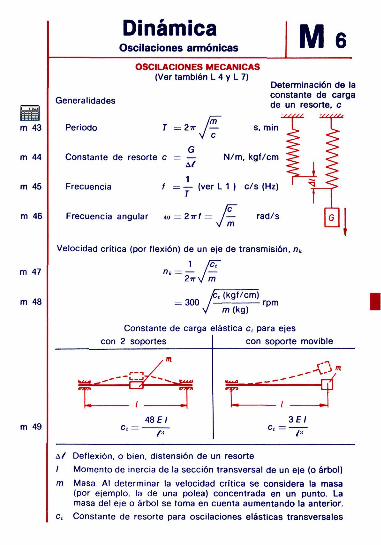
Dinámica Oscilaciones armónicas Me
OSCILACIONES MECÁNICAS (Ver también L 4 y L 7)
Generalidades
Periodo
Determinación de la constante de carga de un resorte, c
T =2TT m s, min
Constante de resorte c
Frecuencia
A/
1
N/m, kgf/cm
(ver L 1 ) c/s (Hz)
Frecuencia angular (,>=2irf-- rad/s
Velocidad crítica (por flexión) de un eje de transmisión, n¡¡
1 Íc7 "* = ;r — 2W m
•/-, (kgf/cm)
: 300 / rpm m(kg)
Constante de carga elástica c, para ejes con 2 soportes con soporte movible
a / Deflexión, o bien, distensión de un resorte / Momento de inercia de la sección transversal de un eje (o árbol) m Masa Al determinar la velocidad crítica se considera la masa
(por ejemplo, la de una polea) concentrada en un punto. La masa del eje o árbol se toma en cuenta aumentando la anterior.
c, Constante de resorte para oscilaciones elásticas transversales
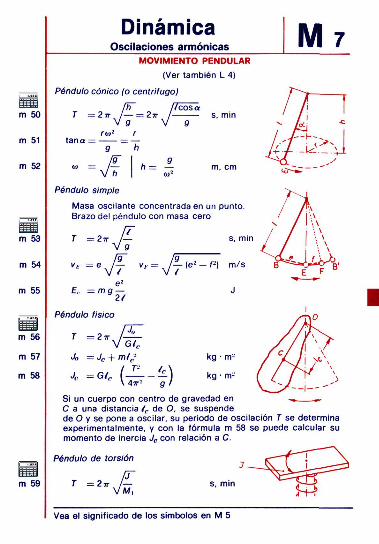
Dinámica Oscilaciones armónicas M7
MOVIMIENTO PENDULAR (Ver también L 4)
Péndulo cónico (o centrífugo) fh~ / / eos a
T = 2 T T / — = 2TT / V g V 9
s, min
tana = g
h
Péndulo simple
Masa oscilante concentrada en un punto. Brazo del péndulo con masa cero
mg — y 2 /
T = 2 T T
VE =
E,. =
Péndulo físico
T = 2
Jo = J „ 4
7F7 r2) m/s
J
m/„-
\ 47T-' g /
kg • m-
kg- m-
Si un cuerpo con centro de gravedad en C a una distancia ír de O, se suspende de O y se pone a oscilar, su periodo de oscilación T se determina experimentalmente, y con la fórmula m 58 se puede calcular su momento de inercia j r con relación a C.
Péndulo de torsión
ÍJ~ -2v
^ Vea el significado de los símbolos en M 5
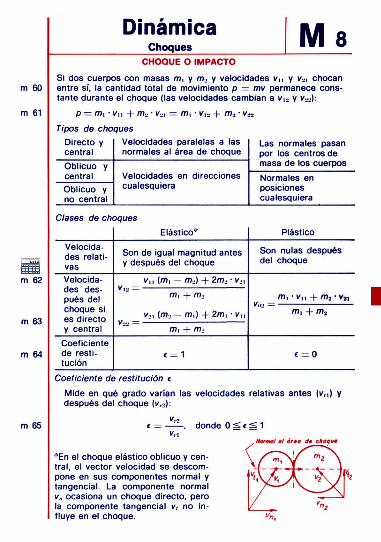
Dinámica Choques Ms
CHOQUE O IMPACTO
Si dos cuerpos con masas m, y m. y velocidades vn y ifa chocan entre sí, la cantidad total de movimiento p = mv permanece constante durante el choque (las velocidades cambian a vu y Va):
p = m, • vu + m¿
Tipos de choques
' fia + nii ■ vTJ
Directo y central Oblicuo y central Oblicuo y no central
Velocidades paralelas a las normales al área de choque
Velocidades en direcciones cualesquiera
Las normales pasan por los centros de masa de los cuerpos Normales en posiciones cualesquiera
Clases de choques
Velocidades relativas Velocida-
pués del choque si es directo y central Coeficiente de restitución
Elástico*
Son de igual magnitud antes y después del choque
Vu (m, — m~) + 2m. • Vj, m, + m-j
v.j, (mL. — m,) + 2m, • v,, m, + m-.
« = 1
Plástico
Son nulas después del choque
m, • ir„ + m2 • v21 v„L. = mx - j - m2
c = 0
Coeficiente de restitución t Mide en qué grado varían las velocidades relativas antes |»„| y después del choque (vr2):
Vr2
vr\ donde 0 < ( S 1
Normal al árae da ckoqva
*En el choque elástico oblicuo y central, el vector velocidad se descompone en sus componentes normal y tangencial. La componente normal v„ ocasiona un choque directo, pero la componente tangencial v, no influye en el choque.
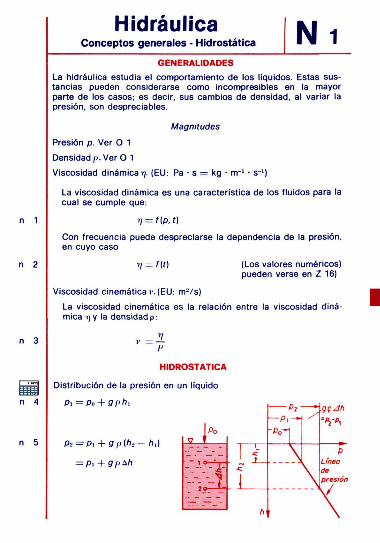
Hidráulica Conceptos generales - Hidrostática Ni
GENERALIDADES La hidráulica estudia el comportamiento de los líquidos. Estas sustancias pueden considerarse como incompresibles en la mayor parte de los casos; es decir, sus cambios de densidad, al variar la presión, son despreciables.
Magnitudes Presión p. Ver O 1 Densidad p. Ver O 1 Viscosidad dinámica r¡. (EU: Pa • s = kg • nr1 • s-1)
La viscosidad dinámica es una característica de los fluidos para la cual se cumple que:
i) = t(p.t)
Con frecuencia puede despreciarse la dependencia de la presión, en cuyo caso
r¡ = f(t) (Los valores numéricos) pueden verse en Z 16)
Viscosidad cinemática r. (EU: mVs) La viscosidad cinemática es la relación entre la viscosidad dinámica r;y la densidad p:
r = ! P
HIDROSTÁTICA
Distribución de la presión en un líquido
Ps = Pi + 91> (hi
= Pi + gi>Ah
h.) £. jolll=-
I i_ ■c
I n
l P2
— P , —
-Po-1
y
1
g(Jh
P Línea de presión
w
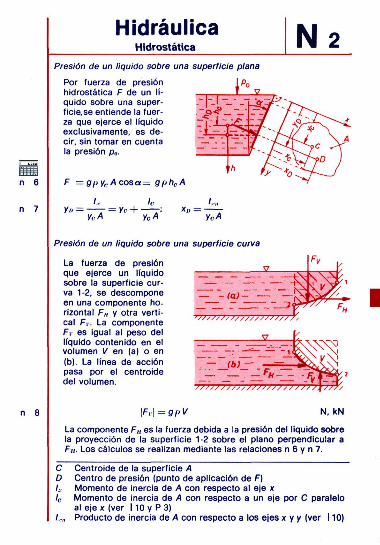
Hidráulica Hidrostática N2
Presión de un líquido sobre una superficie plana
1 P " Por fuerza de presión hidrostática F de un líquido sobre una superficie, se entiende la fuerza que ejerce el liquido exclusivamente, es decir, sin tomar en cuenta la presión p„.
F =g¡>ycA eos o = gphcA
Y»: I* lo _
YcA ~ ° ycA' x„ = -YcA
Presión de un líquido sobre una superficie curva
La fuerza de presión que ejerce un líquido sobre la superficie curva 1-2, se descompone en una componente horizontal FH y otra vertical Fv. La componente F, es igual al peso del líquido contenido en el volumen V en (a) o en (b). La línea de acción pasa por el centroide del volumen.
- r -'—<*>>. r*.
}/>*/////////
— ~_23
F " - ^ fy ////////// Y)/)'.
\F,\=gi>v N, kN
La componente FH es la fuerza debida a la presión del líquido sobre la proyección de la superficie 1-2 sobre el plano perpendicular a Fu. Los cálculos se realizan mediante las relaciones n 6 y n 7.
C Centroide de la superficie A D Centro de presión (punto de aplicación de F) lx Momento de inercia de A con respecto al eje x lc Momento de inercia de A con respecto a un eje por C paralelo
al eje x (ver 110 y P 3) lxy Producto de inercia de A con respecto a los ejes x y y (ver 110)
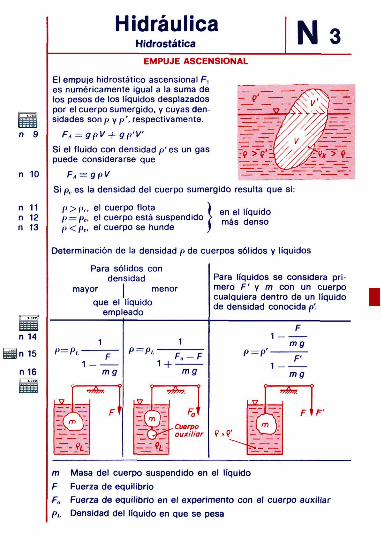
Hidráulica Hidrostática Ns
EMPUJE ASCENSIONAL
El empuje hidrostático ascensional F, es numéricamente igual a la suma de los pesos de los líquidos desplazados por el cuerpo sumergido, y cuyas densidades son p y p', respectivamente.
FA = 9I>V + gp'V
Si el fluido con densidad (/es un gas puede considerarse que
FA = g/>V
Si pc es la densidad del cuerpo sumergido resulta que si
p > pe, el cuerpo flota p = pc. el cuerpo está suspendido p < pc, el cuerpo se hunde
en el liquido más denso
Determinación de la densidad p de cuerpos sólidos y líquidos
Para sólidos con densidad
mayor menor que el líquido
empleado
Para líquidos se considera primero F' y m con un cuerpo cualquiera dentro de un líquido de densidad conocida p'
I'=PL P=PI,
mg
F„-F mg
P=í> mg
mg
w •7&7T-.
m ■£T-í¿:
FT LV
*/}/**?,
— y-*-y-_(m L ~ ^-s-
— (J^*^ =^%r-
Fay * Cuerpo
auxiliar
F*r
9.f
m Masa del cuerpo suspendido en el líquido F Fuerza de equilibrio F„ Fuerza de equilibrio en el experimento con el cuerpo auxiliar pL Densidad del líquido en que se pesa
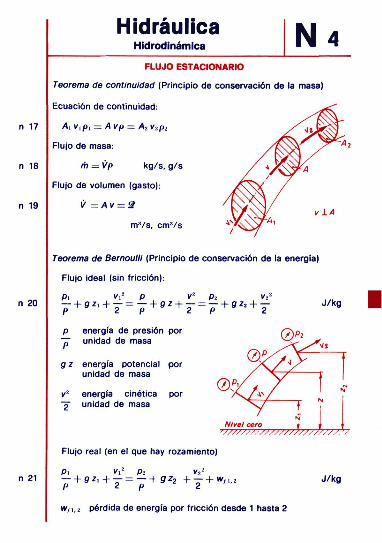
Hidráulica Hidrodinámica N4
FLUJO ESTACIONARIO
Teorema de continuidad (Principio de conservación de la masa)
Ecuación de continuidad:
Ai v¡p¡ = Avp = A2 vzp2
Flujo de masa:
rh = Vp kg/s, g/s
Flujo de volumen (gasto):
V =Av = a
m:,/s, cmVs
Teorema de Bernoulli (Principio de conservación de la energía)
Flujo ideal (sin fricción):
Pl "l P V¿ p, j + 9^ + T=j + 9z + T = 7 + gz, p energía de presión por 77 unidad de masa
g z energía potencial por unidad de masa
v2 energía cinética por ~2 unidad de masa
2 J/kg
Nivel cero i k 1777777777777777777777777.'
Flujo real (en el que hay rozamiento)
Pi fi2 Px v22
- + S-z, + y = - 4 oz2 +j+w,h,
W/i, 2 pérdida de energía por fricción desde 1 hasta 2
J/kg
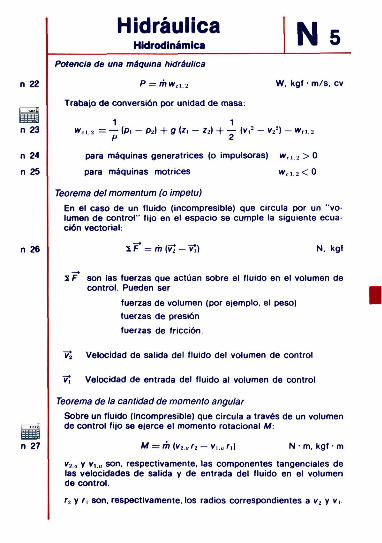
Hidráulica Hidrodinámica Ns
Potencia de una máquina hidráulica
P = mwci2 W, k g f m / s . cv
Trabajo de conversión por unidad de masa:
1 1 Wci.2 = — (Pi - pA + 9 (Zi - z2) + — {v,2 - v2
2) - wf 1.1
para máquinas generatrices (o impulsoras) w, ¡ ■, > 0
para máquinas motrices w¡., 2 < 0
Teorema del momentum (o ímpetu) En el caso de un fluido (incompresible) que circula por un "volumen de control" fijo en el espacio se cumple la siguiente ecuación vectorial:
S F = m ( ¡ í - í ; i N. kgf
í F son las fuerzas que actúan sobre el fluido en el volumen de control. Pueden ser
fuerzas de volumen (por ejemplo, el peso) fuerzas de presión fuerzas de fricción.
v'i Velocidad de salida del fluido del volumen de control
vj Velocidad de entrada del fluido al volumen de control
Teorema de la cantidad de momento angular Sobre un fluido (incompresible) que circula a través de un volumen de control fijo se ejerce el momento rotacional M:
M = m (v2 „ f¡¡ — Vi„ fi) N • m, kgf • m
"j.u Y *i.u son, respectivamente, las componentes tangenciales de las velocidades de salida y de entrada del fluido en el volumen de control.
r2 y f! son. respectivamente, los radios correspondientes a v2 Y "1
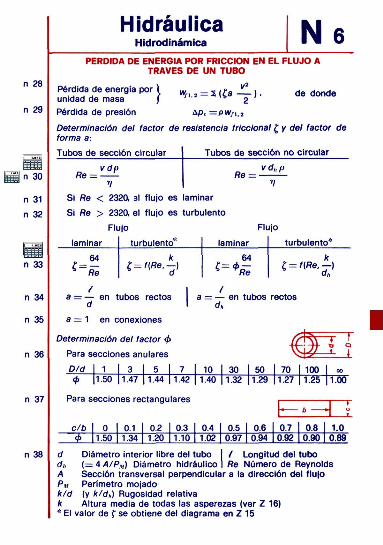
Hidráulica Hidrodinámica Ne
PERDIDA DE ENERGÍA POR FRICCIÓN EN EL FLUJO A TRAVÉS DE UN TUBO
Pérdida de energía por 1 i * , , , = j ( £ , - Ü ) . d e d o n d e unidad de masa / 2 Pérdida de presión A p „ = p w / 1 , 2
Determinación del factor de resistencia friccional ^y del factor de forma a: Tubos de sección circular
v do Re =—-
V
Tubos de sección no circular
Re-Vd"P
Si Re < 2320, al f lujo es laminar Si fie > 2320, el f lujo es turbulento
Flujo Flujo laminar
v Re
turbulento*
£ = f ( f l e , - ) o
laminar 64
^+R-e
turbulento*
d,,
a = — en tubos rectos d
a = 1 en conexiones
Determinación del tactor <f> Para secciones anulares D/d | 1 I 3 I 6 I
a = — en tubos reotos
mi 10 I 30 I 50 I 70
4> |1.50 |1.47 11.44 | 1.42 | 1.40 11.32 11.29 11.27
Para secciones rectangulares
I 100 r T 2 T Too"
c/b I 0 I 0.1 I 0.2 I 0.3 I 0.4 I 0.5 I 0.6 * M.50 | 1.34 | 1.20 11.10 | 1.02 I 0.97 I 0.94
0.7 0.92
0.8 0.90
1.0 0.89
d Diámetro interior libre del tubo / Longitud del tubo d„ ( = 4 A/PM) Diámetro hidráulico I fie Número de Reynolds A Sección transversal perpendicular a la dirección del flujo PM Perímetro mojado k/d (y k/di,) Rugosidad relativa k Altura media de todas las asperezas (ver Z 16) * El valor de f se obtiene del diagrama en Z 15
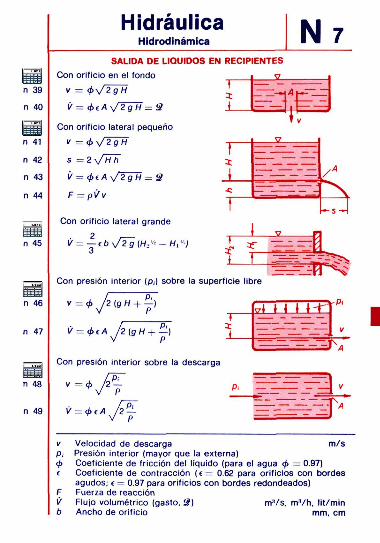
Hidráulica Hidrodinámica N7
SALIDA DE LÍQUIDOS EN RECIPIENTES Con or i f ic io en el fondo
v = 4>V2gH
V = <t>(A^JTg7i=3
Con or i f ic io lateral pequeño
s =2\/Hh V = <t>(A\/TgH = 3
F = pVv
Con or i f ic io lateral grande
V = — ( o \ / 2 9 (H-j* - H, ''■•)
T =—-1 >* I—=
r / '
B i_
á¿M Con presión interior (p,) sobre la superf ic ie libre
^ r T T ^
f) V = <t>iA ¡2(gH + - )
V P
Con presión interior sobre la descarga
v = <¿> Á —
( t
U M I i~rp
^ = - ~ ^ V
mm \/ = <1>eA / 2 — :\ A
v Velocidad de descarga m /s Pi Presión interior (mayor que la externa) <f> Coef ic iente de fr icc ión del líquido (para el agua <¿> = 0.97) e Coef ic iente de contracc ión (c = 0.62 para or i f ic ios con bordes
agudos; £ = 0.97 para or i f ic ios con bordes redondeados) F Fuerza de reacción V Flujo volumétrico (gasto, ¡3) mVs. mVh, lit/min b Ancho de orificio mm. cm
Térmica Variables termodinámicas de estado Oí
Variables de estado son la presión p, la temperatura absoluta T y la densidad f¡, o bien, el volumen especifico v. Presión p (EU: N/m2 = Pa, bar. kgf/cm2)
La presión es la relación de la fuerza F al área de la superficie, A. F P = J
La presión absoluta de un fluido puede interpretarse como la fuerza total que ejercen las moléculas al chocar contra las paredes del recipiente. La presión p' medida con un manómetro es la diferencia entre la presión absoluta y la presión exterior o atmosférica p„; cuando p' > 0 se denomina "presión efectiva", o simplemente "presión". Si p' < 0 se llama entonces "vacío" o "depresión". De ahí se obtiene que la presión absoluta p es:
p = pa + /y Temperatura T, t (Magnitud básica; ver Explicaciones generales)
La unidad de temperatura absoluta 7, el kelvin (o anteriormente, grado Kelvin) K, se define por:
1K = -273.16
donde 7„, es la temperatura (absoluta) del punto triple del agua pura. Además de la escala Kelvin se emplea también la escala Celsius; la temperatura Celsius t se define internacionalmente como:
r = 7 - 273.15 Densidad p (EU: kg/m:l)
La densidad es la relación de la masa m al volumen V:
v Volumen específico v (EU: m'/kg)
El volumen específico es la relación del volumen V a la masa m:
-1.-1-m p
Volumen molar VM (EU: m-Vmol) El volumen molar es la relación del volumen a la cantidad de sustancia (1 mol) contenida en él:
V„ = — n
Cantidad de sustancia (moles) n (Magnitud básica; ver Explicaciones generales)
Térmica Calentamiento de cuerpos sólidos y líquidos 02
CALENTAMIENTO DE SOLIDOS Y LÍQUIDOS
Calor Q (EU: J, kcal) Calor es la energía que se transmite a través de la frontera de sistemas que están a diferente temperatura, cuando se ponen en contacto por medio de paredes diatérmicas
Calor por unidad de masa q (EU: J/kg, kcal/kg) El calor g referido a la unidad de masa es la relación de la cantidad total de calor O a la masa m del cuerpo considerado.
Q <7 = —
m Calor especifico c (EU: J/(kg • K), kcal/(kg • C))
El calor específico (o capacidad térmica específica) c es el calor Q que hay que suministrar o sustraer de una masa m para cambiar su temperatura en M.
Q m Af
q_
El calor específico es función de la temperatura. (Ver valores numéricos en Z 5 a Z 9.)
Calor de transformación ¡por unidad de masa) i (EU: J/kg. Valores numéricos en Z 12.)
El calor de transformación (o "latente") es aquel que al ser suministrado o sustraído de un cuerpo cambia su fase sin que cambie la temperatura. Se distinguen los siguientes calores "latentes".
Calor de fusión
Calor de vaporización
Calor de sublimación
Es el calor necesario para transformar
un cuerpo sólido en uno líquido, a la temperatura de fusión
un líquido a la temperatura de vaporización (dependiente de la presión), en vapor saturado
un cuerpo sólido a la temperatura de sublimación (dependiente de la presión) directamente en vapor saturado. (Temperatura Inferior a la del punto triple.)
sin que cambie su temperatura
Térmica Dilatación de cuerpos sólidos y líquidos 03
Dilatación térmica de sólidos Un cuerpo sólido cambia sus dimensiones al variar su temperatura. Utilizando el coeficiente a de dilatación longitudinal (o lineal), que es dependiente de la temperatura (ver sus valores en Z 11). se tiene que:
Longitud: /2 = / , (1 +a{t2- t,)]
A / = / 2 - / , = / I a ( t 2 - f 1 )
Área:
Volumen:
A, as A, [1 + 2a(f2 - r,)]
AA = A2 — Ai s* A, 2a(r2 - t.)
V, m V, [1 + 3a(t2 - t,)]
Af = l/2 - V, 2» y, 3a(f2 - t,)
A,
Dilatación térmica de líquidos Con /9, el coeficiente de dilatación volumétrica (o cúbica) —dependiente también de la temperatura— se tiene:
l / 2 = I M 1 + / S ( t 2 - t , ) I
AV =V2-V¡ = V¡0 (t2 - t>)
Deflexión térmica A Una deflexión térmica se presenta en elementos bimetálicos, los cuales se flexionan por calentamiento hacia la cara donde está el metal con menor coeficiente de dilatación. Designando con 8 la "deflexión térmica específica" (pueden verse sus valores en la norma DIN 1715) se obtiene para la deflexión térmica total A:
/, V, V-. s
A
Longitud a ti Longitud a f2
Volumen a t, Volumen a t2
Espesor
8L* At
s
A, A,. t, t-2
At
\ \
Área a t, Área a t2
Temperatura Temperatura Incremento o
L
inicial final
le temperatura
í <3
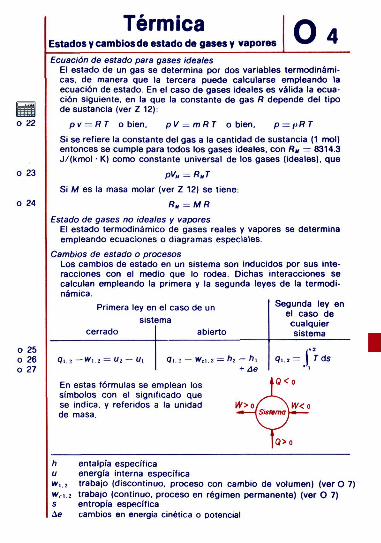
Térmica Estados y cambios de estado de gases y vapores 04 Ecuación de estado para gases ideales
El estado de un gas se determina por dos variables termodinámicas, de manera que la tercera puede calcularse empleando la ecuación de estado. En el caso de gases ideales es válida la ecuación siguiente, en la que la constante de gas R depende del tipo de sustancia (ver Z 12):
p v = /? f o bien, pV = rr>RT o bien, p = /¡RT Si se refiere la constante del gas a la cantidad de sustancia (1 mol) entonces se cumple para todos los gases ideales, con R„ = 8314.3 J/(kmol - K) como constante universal de los gases (ideales), que
pV„ = R„T Si M es la masa molar (ver 2 12) se tiene:
R„ = MR Estado de gases no ideales y vapores
El estado termodinámico de gases reales y vapores se determina empleando ecuaciones o diagramas especiales.
Cambios de estado o procesos Los cambios de estado en un sistema son inducidos por sus interacciones con el medio que lo rodea. Dichas interacciones se calculan empleando la primera y la segunda leyes de la termodinámica.
Segunda ley en Primera ley en el caso de un sistema
cerrado abierto
el caso de cualquier sistema
En estas fórmulas se emplean los símbolos con el significado que se indica, y referidos a la unidad de masa.
h entalpia específica u energía interna específica w, 2 trabajo (discontinuo, proceso con cambio de volumen) (ver O 7) wc,.2 trabajo (continuo, proceso en régimen permanente) (ver O 7) s entropía específica Ae cambios en energía cinética o potencial
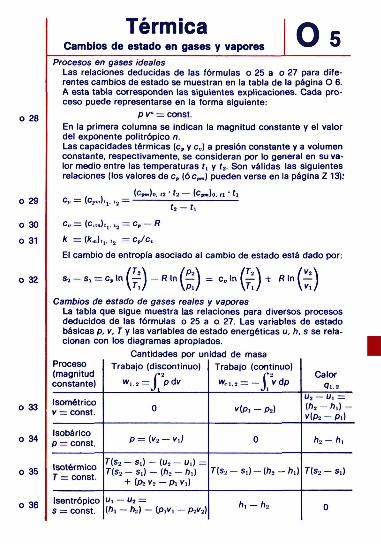
Térmica Cambios de estado en gases y vapores Os
Procesos en gases ideales Las relaciones deducidas de las fórmulas o 25 a o 27 para diferentes cambios de estado se muestran en la tabla de la pagina O 6. A esta tabla corresponden las siguientes explicaciones. Cada proceso puede representarse en la forma siguiente:
p v™ = const. En la primera columna se indican la magnitud constante y el valor del exponente politrópico n. Las capacidades térmicas (c, y c„) a presión constante y a volumen constante, respectivamente, se consideran por lo general en su valor medio entre las temperaturas (, y t2. Son válidas las siguientes relaciones (los valores de c, (óc„,„) pueden verse en la página Z 13):
Cp — (Cj,mít1P
(Cpm)o, (2 ' t-¿ — (C,m)o. ti ' t ,
u ■ t ,
C = | c j , , . , , = c, - R k = (*„).„ H = c„/c„ El cambio de entropía asociado al cambio de estado está dado por:
*-■=• ) - w <H , n (£ ) + f l i n fé ) Cambios de estado de gases reales y vapores
La tabla que sigue muestra las relaciones para diversos procesos deducidos de las fórmulas o 25 a o 27. Las variables de estado básicas p, v, T y las variables de estado energéticas u, h, s se relacionan con los diagramas apropiados.
Cantidades por unidad de masa Proceso (magnitud constante)
Isométrico v = const.
Isobárico p = const.
Isotérmico T = const.
Isentrópico s = const.
Trabajo (discontinuo) w¡ .2 = I pdv
0
p = (v2 - v,;
7(s2 — s,) — (u2 — u,) = r ( » , - s , ) - ( & , - / > , )
+ (P2 V2 — P i Vi)
u, — u2 = (Al, — A)2) — (PiVi — p2V2)
Trabajo (continuo)
WP, - PÜ)
0
T ( S 2 - s , ) - ( / 7 2 - h , )
Ai, - h2
Calor 9 , 2
Ui — U, = ( n 2 - Al,) -^(P2 - P l )
Ai2 — Al,
r(s2 — s,)
0
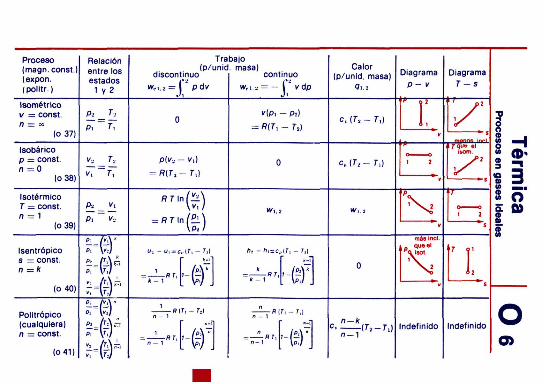
Proceso (magn.const.l (expon. (politr.)
Isométrico v = const. n = co
(0 37)
Isobárico p = const. n = 0
Isotérmico T = const. n = 1
(0 39)
Isentrópico s = const. n = *
(o 40)
Politrópico (cualquiera) n = const.
(o41)
Relación entre los estados
1 y 2
p, _ T,
P, ~ T,
v.. r,
Ai * i
P, ~~ V ;
rfc)=
■i4f'
Tra (p/unid
discontinuo * C 1 , 2 = 1 PÜV
0
p{v¡- v,)
= R(TJ~TI)
«_1_« r, k - 1
R n - 1
1 A r,
n - 1
r, - r.l
bajo . masa)
continuo * , i . = — ( váp
y(Pi - rh)
= R{Tt- T,)
0
W l . 2
ft2 - ft1=c
= «r, * - i
ir, - r2)_
= — — » 7, n - 1
T, - TJ
Calor (p/unid. masa)
Q l . 2
cJT,-T,)
c, (r2 - r,)
W l 2
0
n-k c„ - ( r ^ T - j n — 1
Diagrama p- v
' « i
i
* 1 2
'
\ . *
más incl. . que el
^9.¡sot.
NI "
Indefinido
Diagrama T-s
" ■ / •
i;1 que el l»om.
1 fc-s
T
1 2
^ S
fi; s
Indefinido
\ i» _ i
s 3 • o 9
O O)
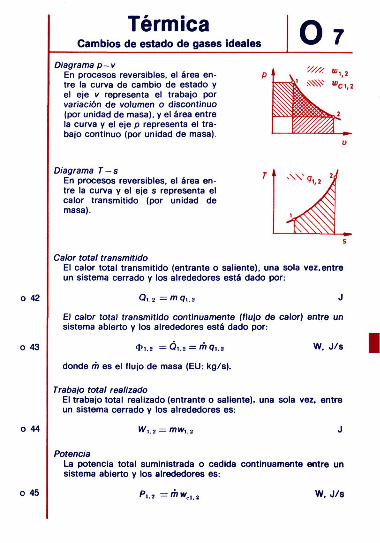
Térmica Cambios de estado de gases ideales
Diagrama p—v En procesos reversibles, el área entre la curva de cambio de estado y el e¡e v representa el trabajo por variación de volumen o discontinuo (por unidad de masa), y el área entre la curva y el eje p representa el trabajo continuo (por unidad de masa).
Diagrama T-s En procesos reversibles, el área entre la curva y el eje s representa el calor transmitido (por unidad de masa).
s
Calor total transmitido El calor total transmitido (entrante o saliente), una sola vez,entre un sistema cerrado y los alrededores está dado por:
o 42 Q.,j = m o i . 2 J
El calor total transmitido continuamente (flujo de calor) entre un sistema abierto y los alrededores está dado por:
o 43 <J>i.2 = Q,.j = rfxji.j W, J /s
donde m es el flujo de masa (EU: kg/s).
Trábalo total realizado El trabajo total realizado (entrante o saliente), una sola vez, entre un sistema cerrado y los alrededores es:
o 44 IV,.. = mwi,» J
Potencia La potencia total suministrada o cedida continuamente entre un sistema abierto y los alrededores es:
o 45 P , , =mwe , 2 W, J/s
07
i -mm. flC1,2
,2
n AV,,
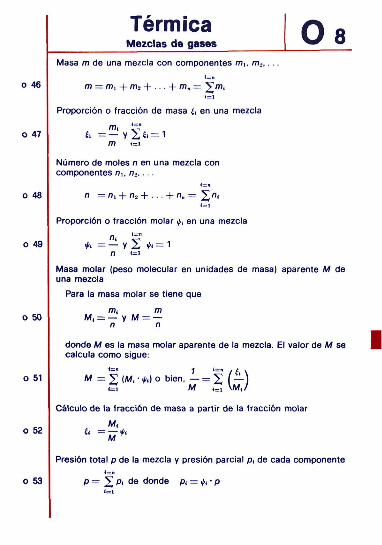
Térmica Mezclas de gases 08
Masa m de una mezcla con componentes m,, m¿....
m = mi -f m-i -f . . . + m„ = V m ,
Proporción o tracción de masa £, en una mezcla
fTli ¡S,"
m <=i
Número de moles n en una mezcla con componentes n,, n2
n = n1 + n2 + . . . + n„ = £ n , <=i
Proporción o fracción molar ¡f, en una mezcla
nt ^ *, = — y 2 , *■ = 1
n <=■
Masa molar (peso molecular en unidades de masa) aparente M de una mezcla
Para la masa molar se tiene que
rrii m M, = — y M = —
n n
donde M es la masa molar aparente de la mezcla. El valor de M se calcula como sigue:
, =" 1 l =" / (i \ M = V (M, • *,) o bien, — = V ( —)
S M ¿? \M,/ Cálculo de la fracción de masa a partir de la fracción molar
Presión total p de la mezcla y presión parcial p, de cada componente
p= £p, de donde p, = i¡it- p
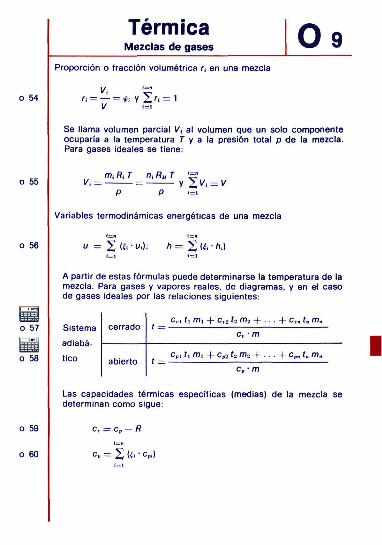
Térmica Mezclas de gases 09
Proporción o fracción volumétrica r< en una mezcla
i = — = fc v 2, n = 1 v Si
Se llama volumen parcial V, al volumen que un solo componente ocuparía a la temperatura T y a la presión total p de la mezcla. Para gases ideales se tiene:
m,R,T n¡R„T !=; V, = = y %V< = V
P P i=i
Variables termodinámicas energéticas de una mezcla
u = X <í<- u <> ; ft = 2 («■ ■ "<>
A partir de estas fórmulas puede determinarse la temperatura de la mezcla. Para gases y vapores reales, de diagramas, y en el caso de gases ideales por las relaciones siguientes:
Sistema adiabático
cerrado
abierto
c„, í, m¡ + cr2 t,m:! + . . + c,,, í, m„ c„ • m
c„i ti m, + cp2 Um2 + . c„- m
. + cp, t„ m„
Las capacidades térmicas especificas (medias) de la mezcla se determinan como sigue:
c, = c„ — R
o„ = 2 ({, • c„)
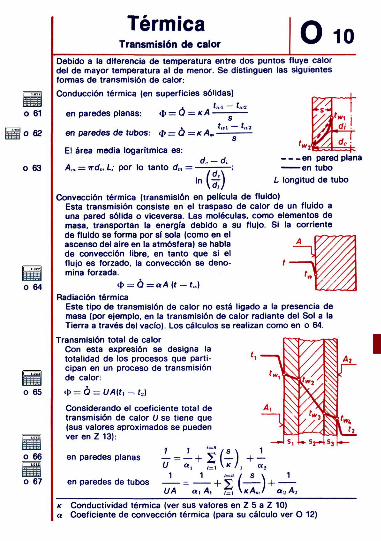
Térmica Transmisión de calor O 10
Debido a la diferencia de temperatura entre dos puntos fluye calor del de mayor temperatura al de menor. Se distinguen las siguientes formas de transmisión de calor: Conducción térmica (en superficies sólidas)
. twl - tu, en paredes planas: <t> = O = K A
en paredes de tubos: <I> = Ó = ic A
El área media logarítmica es: d,
Am = ird„L; por lo tanto d„
s tu,
In (3) - — e n pared plana
en tubo L longitud de tubo
Convección térmica (transmisión en película de fluido) Esta transmisión consiste en el traspaso de calor de un fluido a una pared sólida o viceversa. Las moléculas, como elementos de masa, transportan la energía debido a su flujo. SI la corriente de fluido se forma por sí sola (como en el ascenso del aire en la atmósfera) se habla de convección libre, en tanto que si el flujo es forzado, la convección se deno- t • mina forzada. f
(f> = Ó = a/ t (t — t„) Radiación térmica
Este tipo de transmisión de calor no está ligado a la presencia de masa (por ejemplo, en la transmisión de calor radiante del Sol a la Tierra a través del vacío). Los cálculos se realizan como en o 64.
Transmisión total de calor Con esta expresión se designa la totalidad de los procesos que participan en un proceso de transmisión de calor:
<|> = Q = UA{t, - t2)
Considerando el coeficiente total de transmisión de calor U se tiene que (sus valores aproximados se pueden ver en Z 13):
en paredes planas
en paredes de tubos
J U'
1
UA
1 (=« / S \ 1
= — + 2 (—) + — ai ^i £r, \KAm/ a._. A~ K Conductividad térmica (ver sus valores en Z 5 a Z 10)
a Coeficiente de convección térmica (para su cálculo ver O 12)
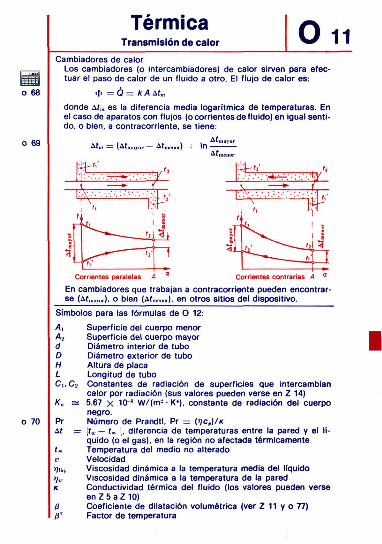
Térmica Transmisión de calor O 11
Cambiadores de calor Los cambiadores (o intercambiadores) de calor sirven para efectuar el paso de calor de un fluido a otro. El flujo de calor es:
i|> = Q = * A Ar,„ donde At,„ es la diferencia media logarítmica de temperaturas. En el caso de aparatos con flujos (o corrientes de fluido) en igual sentido, o bien, a contracorriente, se tiene:
(4tm At„, .,)
Corrientes paralelas A Corrientes contrarias A
En cambiadores que trabajan a contracorriente pueden encontrarse (At,,,;,,,,), o bien (A(,„„.„), en otros sitios del dispositivo.
Símbolos para las fórmulas de O 12: A, A. d D H L Ci, C2
K„ SE
Pr Af =
*/ii,. '/..
Superficie del cuerpo menor Superficie del cuerpo mayor Diámetro interior de tubo Diámetro exterior de tubo Altura de placa Longitud de tubo Constantes de radiación de superficies que intercambian calor por radiación (sus valores pueden verse en Z 14) 5.67 x 10~8 W/(m- • K4), constante de radiación del cuerpo negro. Número de Prandtl, Pr = (»/C,)/K \t„ — t . |, diferencia de temperaturas entre la pared y el líquido (o el gas), en la región no afectada térmicamente Temperatura del medio no alterado Velocidad Viscosidad dinámica a la temperatura media del líquido Viscosidad dinámica a la temperatura de la pared Conductividad térmica del fluido (los valores pueden verse enZ5aZ10) Coeficiente de dilatación volumétrica (ver Z 11 y o 77) Factor de temperatura
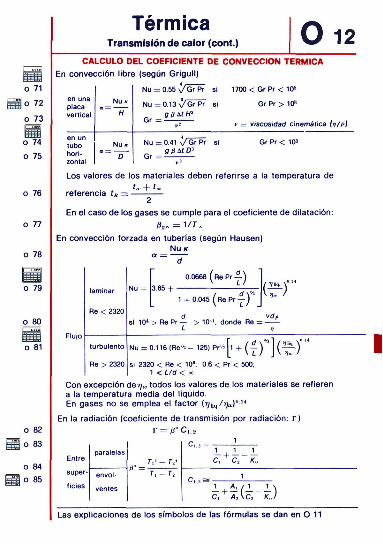
Térmica Transmisión de calor (cont.) O 12
CALCULO DEL COEFICIENTE DE CONVECCIÓN TÉRMICA En convección libre (según Grigull)
en una placa vertical
en un tubo horizontal
N u *
N u *
Nu:=0.55 V G r P r
Nu = 0 . 1 3 v / G r P r
g a At »* Gr =
,, 2
Nu = 0.41 > /Gr Pr g ¡i i í D3
Gr = V2
SÍ
Si
si
1 7 0 0 < G r P r < 10*
Gr Pr > 10*
v — viscosidad cinemática (v/p)
Gr Pr < 105
Los valores de los materiales deben referirse a la temperatura de t „ + t .
referencia tK =
En el caso de los gases se cumple para el coeficiente de dilatación: / V = 1/7".
En convección forzada en tuberías (según Hausen) Nu K
laminar
Re < 2320
turbulento
Re > 2320
0.0668 ( R e P r — )
I +0 .045 ( R e P r — )
d vdp si 10' > Re Pr — > 10-1, donde Re =
L i
•*•HíflW Nu = 0.116 ( R e * - 1
si 2320 < Re < 10e; 0.6 < Pr < 500; 1 < L/d < oo
Con excepción der/^ todos los valores de los materiales se refieren a la temperatura media del líquido. En gases no se emplea el factor {j/Hq.A/w)"-'4
En la radiación (coeficiente de transmisión por radiación: r )
1
Entre
super
ficies
paralelas
envol
ventes
JV - 7V
T, - r ,
C,.2 = : L + JL_1 C, C, K„
c ~ 1
C, X i V C i K.,,1
Las explicaciones de los símbolos de las fórmulas se dan en O 11
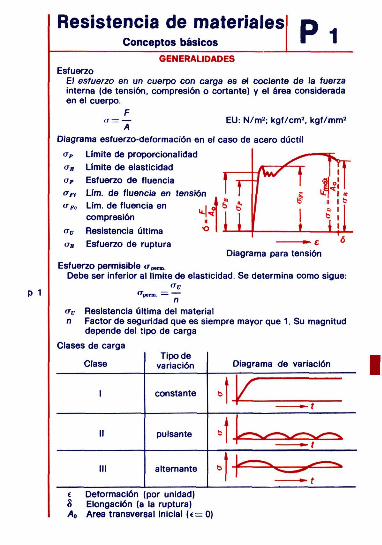
Resistencia de materiales Conceptos básicos P l
GENERALIDADES Esfuerzo
El esfuerzo en un cuerpo con carga es el cociente de la fuerza interna (de tensión, compresión o cortante) y el área considerada en el cuerpo.
F ,r = — EU: N/m2; kgf/cm2, kgf/mm2
A Diagrama esfuerzo-deformación en el caso de acero dúctil
o> Límite de proporcionalidad ' T E
a,-,
Límite de elasticidad Esfuerzo de fluencia Lfm. de fluencia en tensión Lim. de fluencia en compresión Resistencia última Esfuerzo de ruptura
Diagrama para tensión Esfuerzo permisible <r„rm
Debe ser inferior al limite de elasticidad. Se determina como sigue:
n Resistencia última del material Factor de seguridad que es siempre mayor que 1. Su magnitud depende del tipo de carga
Clases de carga
Clase
I
II
III
Tipo de variación
constante
pulsante
alternante
Diagrama de variación
b
b
'I
/
1
€ Deformación (por unidad) & Elongación (a la ruptura) ¿o Área transversal inicial ( t = 0)
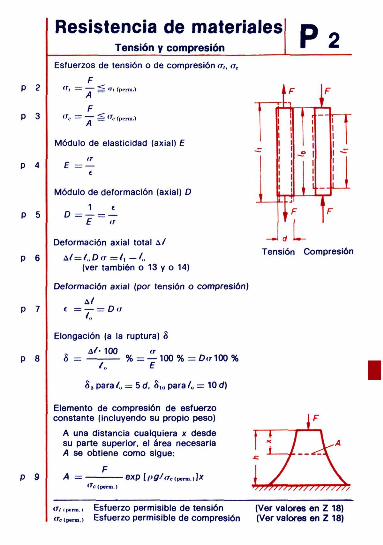
Resistencia de materiales Tensión y compresión P2
Esfuerzos de tensión o de compresión ir,. <re
F tTt = ^ Oí (permO
A F
<rc — ~ ^ tTc (perm.) A
Módulo de elasticidad (axial) E tr
E = — £
Módulo de deformación (axial) D 1 e
D = — = — E <r
Deformación axial total A / A/=/„D(r =/ , - / , .
(ver también o 13 y o 14)
Deformación axial (por tensión o compresión) A/
í = — = D ir
Elongación (a la ruptura) 8 A/- 100 <r
8 = % = — 100% = D<r100% / „ E
t>5 para l„ — 5 d, <5„, para /„ = 10 d)
nUL
R7 rf l—
Tensión Compresión
Elemento de compresión de esfuerzo constante (incluyendo su propio peso)
A una distancia cualquiera x desde su parte superior, el área necesaria A se obtiene como sigue:
A = ■ -exp li>g/<rc
o-, , ,„„ , , Esfuerzo permisible de tensión <Tc (mn>.) Esfuerzo permisible de compresión
(Ver valores en Z 18) (Ver valores en Z 18)
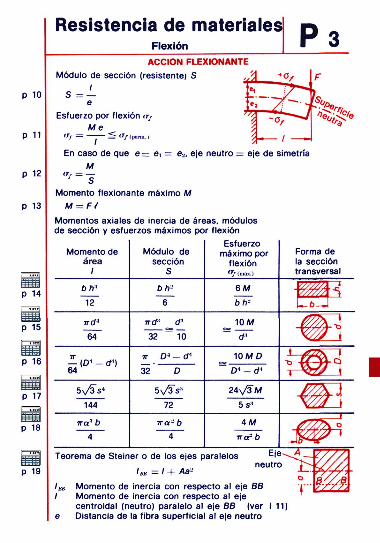
Resistencia de materiales Flexión P3
ACCIÓN FLEXIONANTE Módulo de sección (resistente) S
/ S = —
e Esfuerzo por flexión <rf
_ Me "í — ' = >'/ (I»nn. I
En caso de que e = e, M
»&e
ft¡, eje neutro = e¡e de simetría
Momento flexionante máximo M M = F/
Momentos axiales de inercia de áreas, módulos de sección y esfuerzos máximos por flexión
Esfuerzo Momento de
área /
Módulo de sección
S
máximo por flexión
Forma de la sección transversal
bh:' ~¡2~
bh-~~6~
6M
7Td4
~64~ TTd»
32 10 10M ~1F~
— (D4
64 d4}
32 10MD
5\/3s 5V3"s;1
72 24V5"M
5s:' ira:l b ira- b 4 M
TTCT b
Teorema de Steiner o de los ejes paralelos / „ „ = / + Aa-
lBB Momento de inercia con respecto al eje 88 / Momento de inercia con respecto al eje
centroidal (neutro) paralelo al eje 88 (ver 111) e Distancia de la fibra superficial al eje neutro
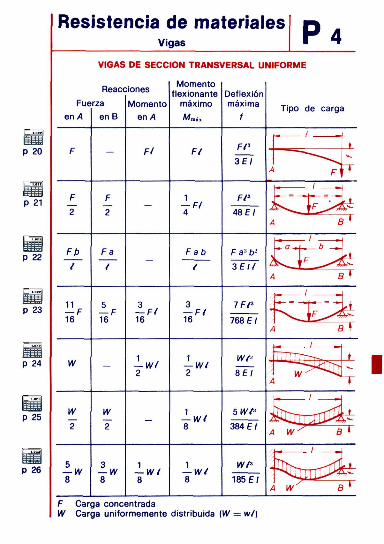
Resistencia de materiales Vigas
Fue e n ^
F
F
y
Ft>
11 — F 16
W
W
2~
5 — W 8
F Car W Car
VIGAS
Reace rza
en B
-
F
T
Fa
/
5 — F 16
-
y
3 — IV 8
ja conc ja unifo
DE SECC
iones Momento
en A
Fl
-
-
LFÍ 16
1 . — Wl 2
-
1 — Wl 8
sntrada rmemente
ION TRANS\
Momento flexionante
máximo
F{
1 — Fl 4
Fab
t
3 — Fl 16
1 — W / 2
— Wl 8
1 — Wl 8
distribuida I
fERSAL U
Deflexión máxima
f
FP
3Í7
FP
48 F /
Fa-b-
3EI/
1FP
768 E /
8?7
5 W f
384 E /
Wl*
185 E /
W = w/)
P4 NIFORME
Tipo de carga
/
i
' t
M 1 " . 1
r—ir---: 4
. . B *
> / ^ O . J , 6 - ^
4
-
^ - - ^ - ^ % X N -
a» '
^ T T = : 4
/
u flt
/
'
A t
1
T
V' B •
* <
^rnnU^ u 4 W^ B '
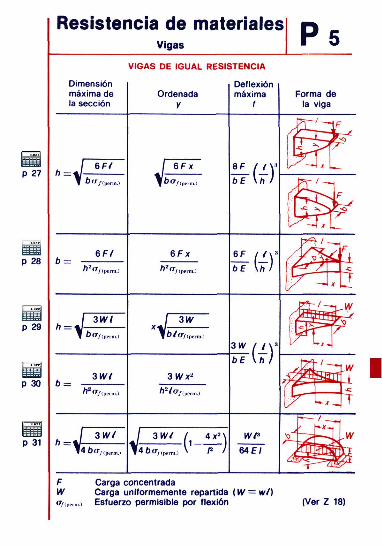
Resistencia de materiales Vigas P5
VIGAS DE IGUAL RESISTENCIA
Dimensión máxima de la sección
P 27 h = Vi 6FI
p 28
p 29
p 30
p 31
6FI
1 60-/<pem,.)
/) = 3 W
r>2«f,
■4? 14 ba
Wl
Ordenada y
if 6Fx
6Fx "2<r„
^6/í7/(p„„
3Wx* h-t "f (pertn.)
ZWI Í4ÍXJ,, :('-£)
Deflexión máxima
I
8F
bT (F)'
— (-)" o f Vh /
3 W
fcT (r)"
Wf 64£/
Forma de la viga
►* *
W
/ __ W
F Carga concentrada W Carga uniformemente repartida (W = wl) ff/(pem..) Esfuerzo permisible por flexión (Ver Z 18)
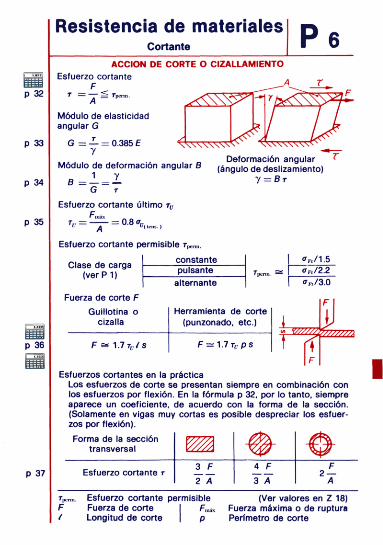
Resistencia de materiales Cortante Pe
ACCIÓN DE CORTE O CIZALLAMIENTO Esfuerzo cortante
Módulo de elasticidad angular G
G = — = 0.385 E y
Módulo de deformación angular B
B = — = -L G T
Esfuerzo cortante últ imo TV
Fmáx Tr = = 0 .8 <JT1
l £ V( tens.)
Esfuerzo cortante permisible rperm.
Deformación angular * ángulo de deslizamiento)
y — Br
Clase de carga ( ve rP1 )
Fuerza de corte F
Guillotina o cizalla
constante pulsante
1.7 rr/s
alternante
Herramienta de corte (punzonado. etc.)
I <r«/1.5
*Ft/3.Q
F SÍ 1.7 Tu ps V/////1 W//////¿
Esfuerzos cortantes en la práctica Los esfuerzos de corte se presentan siempre en combinación con los esfuerzos por f lexión. En la fórmula p 32, por lo tanto, siempre aparece un coeficiente, de acuerdo con la forma de la sección. (Solamente en vigas muy cortas es posible despreciar los esfuerzos por flexión).
Forma de la sección transversal
Esfuerzo cortante r 3 F 4 F ~3~W
Tperm. Esfuerzo cortante permisible F Fuerza de corte Fmá3
/ Longitud de corte p
(Ver valores en Z 18) Fuerza máxima o de ruptura Perímetro de corte

Resistencia de materiales Torsión P7 GENERALIDADES
Esfuerzo de torsión T,
M Tt=st
= ^ (pe rm .
Momento torsionante T
P P
~ 2 i r n ~
Módulo de sección
-Fa
en torsión S,
s,-. a
a Distancia entre la fibra extrema y el centroide C
Ángulo de torsión p — — í <t> =
TI
Características de elementos en torsión
Momento polar de inercia
I.
Módulo polar
de sección S,
Esfuerzo cortante máximo
Tf i máx)
Forma y dimensiones de
la sección
"32~
ird:¡ T ¡ 5.1 —
— (D 4
32 d') r Di~di
5.1-!>• 1
en 1 — b h-9 2
en 2 — b-h en 2
9T 2bh-
9r 2 b-h
Tabla de valores de i para secciones anulares ?fcr
d { = —
D 1
1 - i 4
0.5
1 0667
0.6
1 1489
0 7
1.3159
0.8
1.6194
0.9
2.9136
0.95
5.3908
'hperm.) Esfuerzo cortante permisible en torsión (Ver valores en Z 18) P Potencia transmitida por rotación
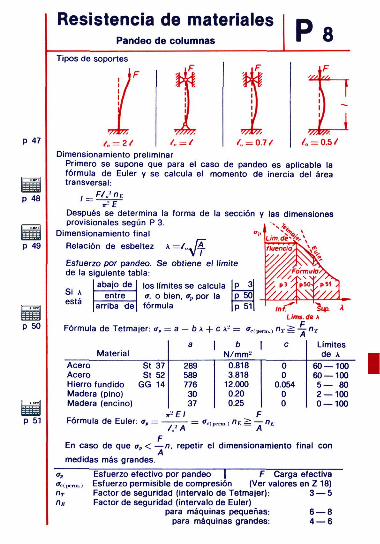
Resistencia de materiales Pandeo de co lumnas Pe
Tipos de soportes
/ „ = 2 / t., = t /.. = 0.7 / Dimensionamiento preliminar
Primero se supone que para el caso de pandeo es aplicable la fórmula de Euler y se calcula el momento de inercia del área transversal:
. F/J- nE / = : r f Después se determina la forma de la sección y las dimensiones provisionales según P 3.
Dimensionamiento final Relación de esbeltez A
Esfuerzo por pandeo. Se obtiene el límite de la siguiente tabla:
Um.de-%^.
Si k está
abajo de entre
arriba de
Fórmula de Tetmajer: a, = a
los límites se calcula a, o bien, ffp por la fórmula
p p p
3 50 51
fluencioÁ
Fórmula/
■ b A + C A" Lims. de A
rc(perm.) nT ^ ~JT ^ T
Material Acero St 37 Acero St 52 Hierro fundido GG 14 Madera (pino) Madera (encino)
a
289 589 776 30 37
b N/mm-
0.818 3.818
12.000 0.20 0.25
o
0 0
0.054 0 0
Límites de \
60—100 60—100 5 — 80 2 — 100 0 — 100
Fórmula de Euler: <r, = -/.rA ■ ffc(perm.) nE =
En caso de que a, < — n . repetir el dimensionamiento final con A
medidas más grandes.
<7, Esfuerzo efectivo por pandeo F Carga efectiva ffc(perni) Esfuerzo permisible de compresión (Ver valores en Z 18) nT Factor de seguridad (intervalo de Tetmajer): 3 — 5 n,: Factor de seguridad (intervalo de Euler)
para máquinas pequeñas: 6 — 8 para máquinas grandes: 4 — 6
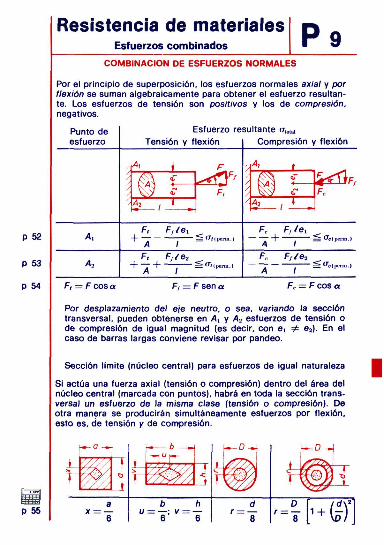
Resistencia de materiales Esfuerzos combinados P9
COMBINACIÓN DE ESFUERZOS NORMALES
Por el principio de superposición, los esfuerzos normales axial y por flexión se suman algebraicamente para obtener el esfuerzo resultante. Los esfuerzos de tensión son positivos y los de compresión. negativos.
Punto de esfuerzo
Esfuerzo resultante au^ Tensión y flexión Compresión y flexión
?^H3F/
A2
F,
A,
lfctífc <A,
A, F,íe,
= íTriperm.) Fr F//e,
'A I
F, Ff/e2 H 7 1 ; = ^((perm.)
A I
F, F,/e2
I = "c(perm.)
F, = F COS a F, = F sen a Fr = F eos a
Por desplazamiento del eje neutro, o sea, variando la sección transversal, pueden obtenerse en A, y A¡ esfuerzos de tensión o de compresión de igual magnitud (es decir, con e! =É e2). En el caso de barras largas conviene revisar por pandeo.
Sección límite (núcleo central) para esfuerzos de igual naturaleza
Si actúa una fuerza axial (tensión o compresión) dentro del área del núcleo central (marcada con puntos), habrá en toda la sección transversal un esfuerzo de la misma clase (tensión o compresión). De otra manera se producirán simultáneamente esfuerzos por flexión, esto es, de tensión y de compresión.
í
1 M/. VXy?' •' / / / /
4
0
i
- — b _ _ —i u [ —
w^¿ 1 -c
ri K H
'-7h£
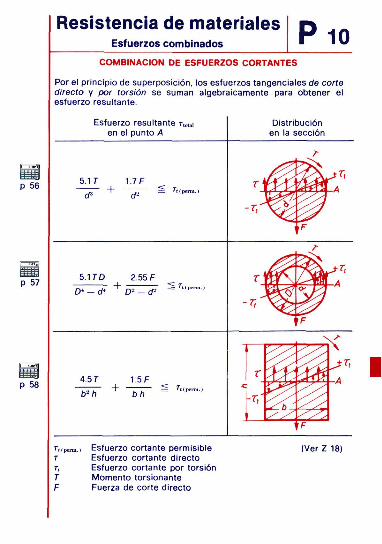
Resistencia de materiales Esfuerzos combinados P10
COMBINACIÓN DE ESFUERZOS CORTANTES
Por el principio de superposición, los esfuerzos tangenciales de corte directo y por torsión se suman algebraicamente para obtener el esfuerzo resultante.
Esfuerzo resultante Ttou en el punto A
Distribución en la sección
5.1 T 1.7 F
5.1 TD D>-d*
2.55 F D- - rf- S r„„
4.5 7 b'h
Tt(penn.i Esfuerzo cortante permisible r Esfuerzo cortante directo Ti Esfuerzo cortante por torsión T Momento torsionante F Fuerza de corte directo
(Ver Z 18)
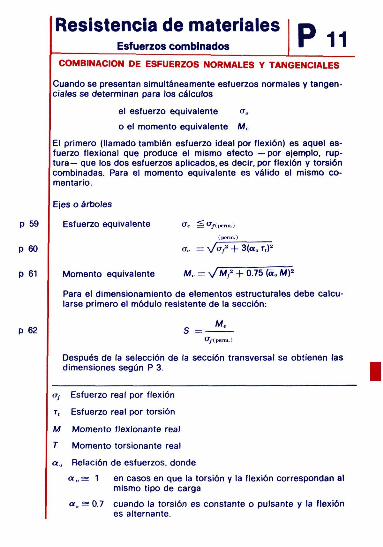
Resistencia de materiales Esfuerzos combinados P11
COMBINACIÓN DE ESFUERZOS NORMALES Y TANGENCIALES
Cuando se presentan simultáneamente esfuerzos normales y tangenciales se determinan para los cálculos
el esfuerzo equivalente o, o el momento equivalente M,
El primero (llamado también esfuerzo ideal por flexión) es aquel esfuerzo flexional que produce el mismo efecto —por ejemplo, ruptura— que los dos esfuerzos aplicados.es decir, por flexión y torsión combinadas. Para el momento equivalente es válido el mismo comentario.
Ejes o árboles
Esfuerzo equivalente cr„ Soycm) (perm.)
a, = V<7/ + 3(<*„ Tt\'
Momento equivalente M„ = V M / + 0.75 (5„ M)2
Para el dimensionamiento de elementos estructurales debe calcularse primero el módulo resistente de la sección:
S = •
Después de la selección de la sección transversal se obtienen las dimensiones según P 3.
<T¡ Esfuerzo real por flexión
T, Esfuerzo real por torsión
M Momento flexionante real
r Momento torslonante real
a„ Relación de esfuerzos, donde a„ss 1 en casos en que la torsión y la flexión correspondan al
mismo tipo de carga
<*„ a¡ 0.7 cuando la torsión es constante o pulsante y la flexión es alternante.
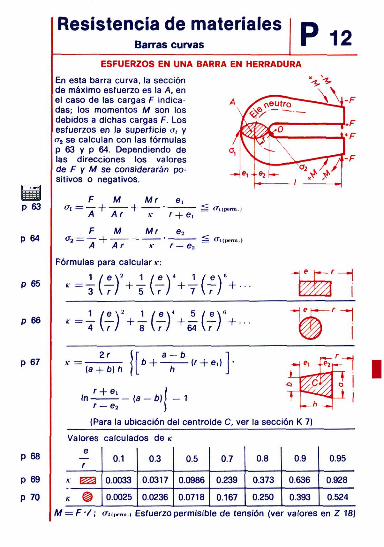
Resistencia de materiales Barras curvas 12
ESFUERZOS EN UNA BARRA EN HERRADURA
En esta barra curva, la sección de máximo esfuerzo es la A, en el caso de las cargas F indicadas; los momentos M son los debidos a dichas cargas F. Los esfuerzos en la superficie a, y a,, se calculan con las fórmulas p 63 y p 64. Dependiendo de las direcciones los valores de F y M se considerarán positivos o negativos.
<r((perm.}
F M Mr <r, = — + - — + A Ar K
F M Mr A Ar K
e, r + e,
e2
r — e-2
Fórmulas para calcular K: 1 / e \ 2 1 / e \ 4 1 / e\"
\ ^ M
1 / e \ 2 1 / e \ 4 5 / e\« T I T ) + 7 l 7 ) +64" Í7J +■
0 + b)h \[ a-b
b + — (r + e.) ]■
- - (a - f» 1 - e2 I— h —
(Para la ubicación del centroide C, ver la sección K 7)
Valores e r
«: ^ 3
r @
calculac
0.1
0.0033
0.0025
os de K
0.3
0.0317
0.0236
0.5
0.0986
0.0718
0.7
0.239
0.167
0.8
0.373
0.250
0.9
0.636
0.393
0.95
0.928
0.524
M = FV; «•„, i Esfuerzo permisible de tensión (ver valores en Z 18)
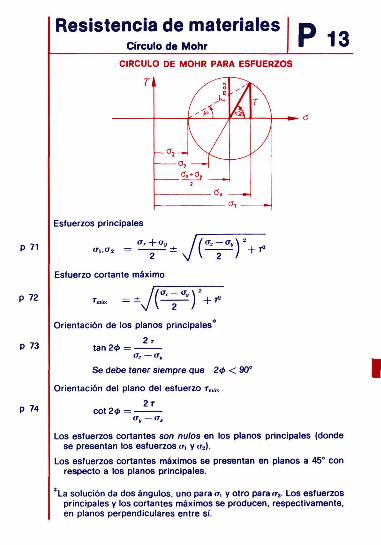
Resistencia de materiales Círculo de Mohr P13
CIRCULO DE MOHR PARA ESFUERZOS
r{
LA
_ d , ^ ay — ) 0,+ Cjy
2
0 0» _
a, _
h
Esfuerzos principales
<Ti.(T2 =
Esfuerzo cortante máximo
*±=.y(«=s)-+,
-7(W^ Orientación de los planos principales
2 T tan 24> ■
(TX (Ty
Se debe tener siempre que 2<t> < 90°
Orientación del plano del esfuerzo TmSx
2 r COt 2 * :
Los esfuerzos cortantes son nulos en los planos principales (donde se presentan los esfuerzos <T, y o-.).
Los esfuerzos cortantes máximos se presentan en planos a 45° con respecto a los planos principales.
La solución da dos ángulos, uno para >r, y otro para<r2. Los esfuerzos principales y los cortantes máximos se producen, respectivamente, en planos perpendiculares entre sí.
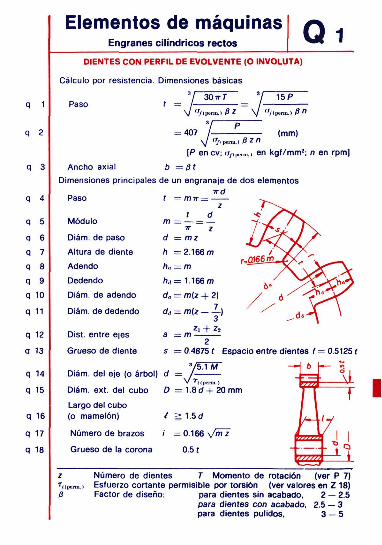
Elementos de máquinas Engranes cilindricos rectos Qi
DIENTES CON PERFIL DE EVOLVENTE (O INVOLUTA)
Cálculo por resistencia. Dimensiones básicas
Paso "I 30 irT _ V 15P
:407 (mm) W 1^f^perm.^ 0 Z n
[P en cv; «y,,*™., en kgf/mm2 ; n en rpm]
Ancho axial b = /S t Dimensiones principales de un engranaje de dos elementos
Trd Paso
Módulo
Diám. de paso
Altura de diente
Adendo Dedendo Diám. de adendo
Diám. de dedendo
Dist. entre ejes
Grueso de diente
Diám. del eje (o árbol) d
Diám. ext. del cubo
Largo del cubo (o mamelón)
Número de brazos
Grueso de la corona
s = 0.48751 Espacio entre dientes I = 0.51251
b V5.1 M
V T'tiperni.) D = 1 . 8 d + 20mm
í 1.5d
= 0.166 \/mz
0.5 t
z Número de dientes T Momento de rotación (ver P 7) T«iperm] Estuerzo cortante permisible por torsión (ver valores en 2 18) p Factor de diseño: para dientes sin acabado, 2 — 2.5
para dientes con acabado, 2.5 — 3 para dientes pulidos, 3 — 5
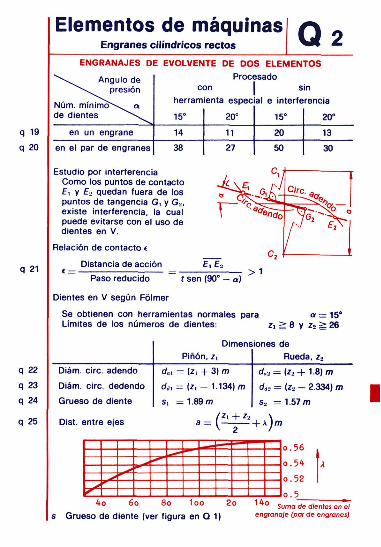
Elementos de máquinas Engranes cilindricos rectos Q2
ENGRANAJES DE EVOLVENTE DE DOS ELEMENTOS Procesado
con sin herramienta especial e Interferencia
20° Núm. mínimo de dientes 15° 15° 20°
en un engrane 14 11 20 13
en el par de engranes 38 27 50 30
Estudio por interferencia Como los puntos de contacto £, y Ej quedan fuera de los puntos de tangencia G, y G2 . existe interferencia, la cual puede evitarse con el uso de dientes en V.
Relación de contacto t
Distancia de acción € — -
fiE= > 1
Paso reducido f sen (90° — a)
Dientes en V según Fólmer
Se obtienen con herramientas normales para a = 15° Límites de los números de dientes: z , 2 8 y z2 § 26
Dimensiones de Piñón, z, Rueda, z2
Diám. circ. adendo
Diám. clrc. dedendo
Grueso de diente
Dist. entre ejes
d,u
Si
• (z, +3)m (z, - 1.134) m 1.89m
i + z2
dd2 = (z2 - 2.334) m s2 = 1.57 m
a : / z . + z2 \
+ AI/7!
.<* ** '
o 56 o.5* o.52 0 . 5
4o 6o 8o 1oo 2o
s Grueso de diente (ver figura en Q 1)
14o engranaje (par de engranes;
Suma de dientes en ef
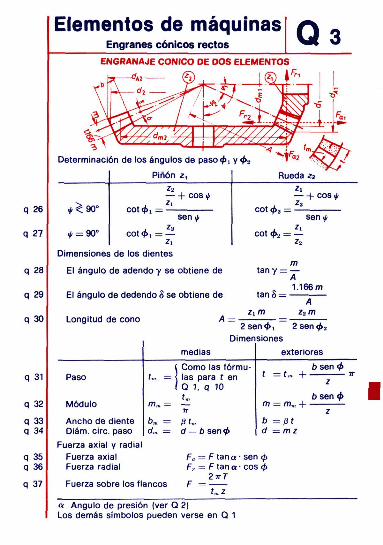
Elementos de máquinas Engranes cónicos rectos Q3
ENGRANAJE CÓNICO DE DOS ELEMENTOS
Determinación de los ángulos de pasoc¿>, y <)>.
Piñón 2,
^ 9 0 °
^ = 90°
cot<£,
COt<í>i :
Dimensiones de los dientes
El ángulo de adendoy se obtiene de
El ángulo de dedendo S se obtiene de
Longitud de cono A 2sen<f>, 2sen<^>2
Dimensiones medias exteriores
Paso
Módulo
Ancho de diente b„, Diám. circ. paso dm
Fuerza axial y radial Fuerza axial Fuerza radial
Fuerza sobre los flancos
Como las fórmulas para t en Q 1, q 10 t„
d — b sen <f>
t =t_ +•
m = m„ + ■
6 =/3 t d = mz
b sen # z
b sen <¿>
F„ = Ftana- sen <f¡ FT = F tana- eos <¡f>
2TTT
~~ f . z a Ángulo de presión (ver Q 2) Los demás símbolos pueden verse en Q 1
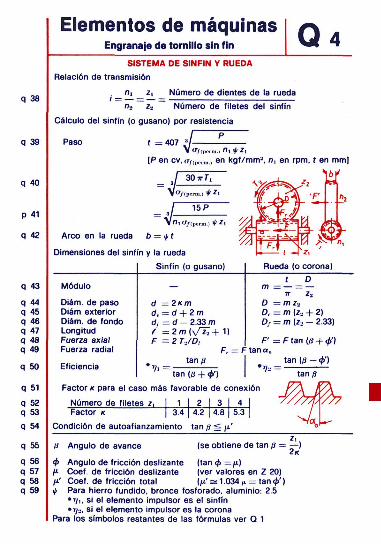
Elementos de máquinas Engranaje de tornillo sin fin Q 4
SISTEMA DE SINFÍN Y RUEDA Relación de transmisión
n, z, Número de dientes de la rueda
n¿ z2 Número de filetes del sinfín
Cálculo del sinfín (o gusano) por resistencia
Paso = 407 • / -Ve*
t í <J/(perm.) ^1 >p Z¡
\P en cv, oftpemj en kgf/mm2 , n, en rpm, t en mm)
/ 30„r, 4 , ■ 1*K = 7 *#
\oy(Perm.) ^ Zi ^ '
<£ 15P
r>l«"/(perm.) ^ Z |
Arco en la rueda b = ^t
Dimensiones del sinfín y la rueda
Módulo
Diám. de paso Diám exterior Diám. de fondo Longitud Fuerza axial Fuerza radial
Eficiencia
Sinfín (o gusano) Rueda (o corona) t D
~~ 7T ~ Z., d = 2 « m D = « I Í , d f = d + 2 m D, = m (z2 + 2) d¡ =d — 2.33 m Dr = m (z5 — 2.33) • =2m(Vi¡+1) F = 2 7V D, F = F tan (p + <£')
F, = Ftanor„ tan ^ tan (/i — <¿>')
7 ' _ tan (fi + <p) '"' tan fi
Factor K para el caso más favorable de conexión
Número de filetes z, I 1 I 2 I 3 I 4 I Factor K | 3.4 | 4.2 ¡ 4.8 | 5.3 |
Condición de autoafianzamiento tan / I Í J I '
éffi li Ángulo de avance (se obtiene de tan fi = —)
2 K <t> Ángulo de fricción deslizante (tan<¿>=(¿) /* Coef. de fricción deslizante (ver valores en Z 20) fí' Coef. de fricción total \¡t! m 1.034 p. = tan 4>') t Para hierro fundido, bronce fosforado, aluminio: 2.5
•>/ i . si el elemento impulsor es el sinfín • 7y2, sí el elemento impulsor es la corona
Para los símbolos restantes de las fórmulas ver Q 1
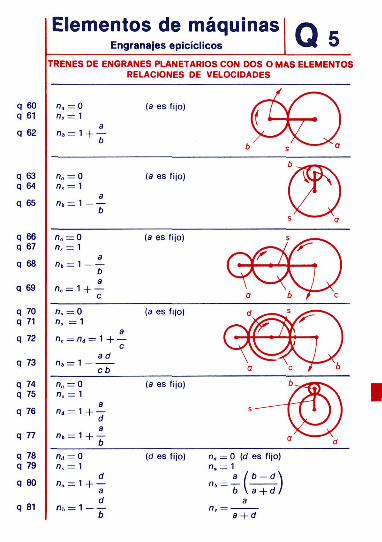
Elementos de máquinas Engranajes epicíclicos Qs
TRENES DE ENGRANES PLANETARIOS CON DOS O MAS ELEMENTOS RELACIONES DE VELOCIDADES
(a es fijo)
nb = 1 + —
1
(a es fijo)
= 1
(a es fijo)
n„ = 1 +
= 0 = 1
(a es fijo)
n»:
na -
:1 + ad
:0 : 1
= 1 + = 1 +
(a es fijo)
(d es fijo) n„ = 0 (d es fijo) n. = 1
n. = 1 + — a d
nb = 1
6 \ a + cf/
a + d
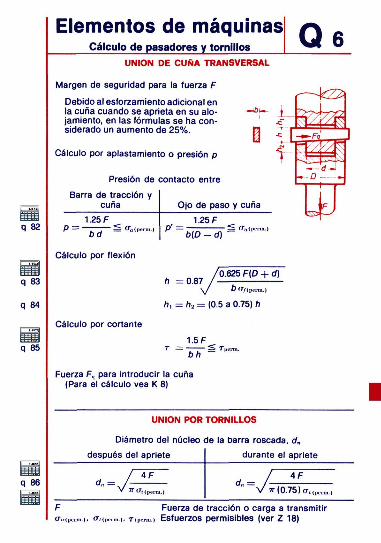
Elementos de máquinas Cálculo de pasadores y tornillos Qe
UNIÓN DE CUÑA TRANSVERSAL
Margen de seguridad para la fuerza F
Debido al esforzamiento adicional en la cuña cuando se aprieta en su alojamiento, en las fórmulas se ha considerado un aumento de 25%.
Cálculo por aplastamiento o presión p
r~^Z2\
0
Presión de contacto entre
Ojo de paso y cuña Barra de tracción y
cuña
1.25 F P = - "a (perm.)
bd
Cálculo por flexión
Cálculo por cortante
1.25 F tf = ^ <r„(perm.)
b(D - d)
h =0.87 /0.625 F[D + d)
\y b <r/(perm.l
ht = h2 = (0.5 a 0.75) h
1.5 F ~b~h
Fuerza F, para introducir la cuña (Para el cálculo vea K 8)
UNIÓN POR TORNILLOS
Diámetro del núcleo de la barra roscada, d„ después del apriete
d / AF
V7r(T, (p„m . ,
durante el apriete
/ 4F V 77(0.75)^^^
F Fuerza de tracción o carga a transmitir Esfuerzos permisibles (ver Z 18)
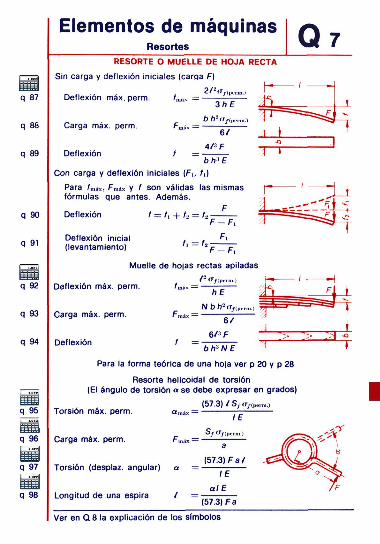
Elementos de máquinas Resortes Q7
RESORTE O MUELLE DE HOJA RECTA
Sin carga y deflexión iniciales (carga F)
2 ' 2 ' r / (perm. ) Deflexión máx. perm. ímáx =
Carga máx. perm. Fmáx=:
Deflexión t
3hE
b n2(ry(penn.)
6 / APF
bh:'E Con carga y deflexión iniciales (F,, f,)
Para fmix, Fmix y / son válidas las mismas fórmulas que antes. Además,
Deflexión
Deflexión inicial (levantamiento) t, =t,
F-F, F,
Deflexión máx. perm.
Carga máx. perm.
Deflexión
F-F,
Muelle de hojas rectas apiladas
f U/(perm.)
bh:,NE
Para la forma teórica de una hoja ver p 20 y p 28
Resorte helicoidal de torsión (El ángulo de torsión a se debe expresar en grados)
(57.3) / Sf ÍTy(perm.) Torsión máx. perm.
Carga máx. perm.
Torsión (desplaz. angular)
Longitud de una espira
&m;
Fm
a
1
IE Of íiy(perm.)
a (57.3) Fal JC
IE clE
(57.3) F a
Ver en Q 8 la explicación de los símbolos

Elementos de máquinas Resortes Qs
RESORTE ESPIRAL (ÁNGULO a EN GRADOS) 114.6/ tT; ( p e rm.)
Desplazam. ang. perm. a
Mom. de torsión perm
Desplazam. angular
Momento de torsión
Empotramiento en H
Articulación en H
Distancia entre espiras a ~
Número de espiras N
hE _ bh-
'más — ~ tTj'fperm.l 6
687.6 Ti a =
Ebh-< aE b h-<
T = 687.6/
T F, = — F, =-
2 L. (r/- rfíir
longitud media de espira
Resorte de impulso
En general, se supone conocido el diámetro interior D„ de la caia del resorte y se corrige después según los resultados de los cálculos.
D„ Diámetro del núcleo di, ss —
Grueso del resorte 100
(redondear h a valores normalizados)
Longitud del elemento /
Número de vueltas n„
D„ + d : / V , 7 T
2
Estado del resorte
Suelto
Esforzado
Número de espiras
N D,,~d
2/1
2/1
Momento de la fuerza* E b h» w
7 m l „ a 3 6 /
Ebh'ir 7máx s [N, - N, + 3)
D I
*Descontar de 10% a 30% por fricción
F Empuje de trabajo T Momento de la fuerza Sf Módulo de sección
ir/cperm i Esfuerzo permisible por flexión (ver Z 19)
£ Módulo de elasticidad (ver Z 19)
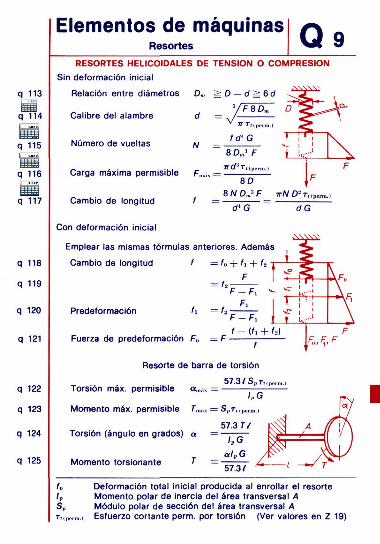
Elementos de máquinas Resortes Q9
RESORTES HELICOIDALES DE TENSIÓN O COMPRESIÓN Sin deformación inicial
Relación entre diámetros Dm £ D — d a 6 d
VF8D„, D Calibre del alambre d =
Número de vueltas /v =
Carga máxima permisible FmfcI =
7r7" t (pe
fd'G &DJ F
7rd3T, (p„,
8D
Cambio de longitud
Con deformación inicial
f = 8NDJF TTND-T,,,,,
d'G dG
Emplear las mismas fórmulas anteriores. Además
Cambio de longitud
Predeformación
Fuerza de predeformación F„
Torsión máx. permisible o„„
Resorte de barra de torsión
u / . o t dpTtfpen
IpG Momento máx. permisible rmfa = SrT,[p,Tm.i
57.3 T/ Torsión (ángulo en grados) a = -
/„G
Momento torsionante T =J±± JL, _ / F 57.3/ *" ' ^ T
fo Deformación total inicial producida al enrollar el resorte /„ Momento polar de inercia del área transversal A S„ Módulo polar de sección del área transversal A T.iperm.i Esfuerzo cortante perm. por torsión (Ver valores en Z 19)
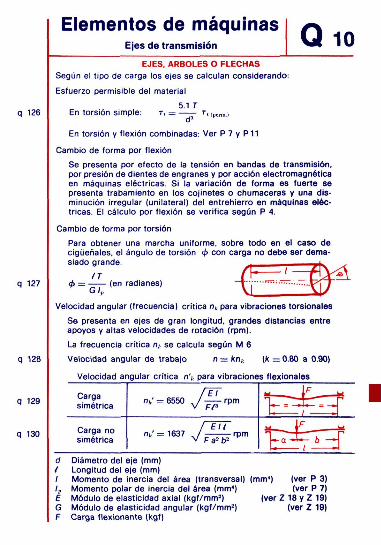
Elementos de máquinas Ejes de t ransmisión Q10
En torsión simple:
EJES. ARBOLES O FLECHAS Según el tipo de carga los ejes se calculan considerando:
Esfuerzo permisible del material
5.1 T — ~TT ' (perm.)
O''
En torsión y flexión combinadas: Ver P 7 y P11
Cambio de forma por flexión
Se presenta por efecto de la tensión en bandas de transmisión, por presión de dientes de engranes y por acción electromagnética en máquinas eléctricas. Si la variación de forma es fuerte se presenta trabamiento en los cojinetes o chumaceras y una disminución irregular (unilateral) del entrehierro en máquinas eléctricas. El cálculo por flexión se verifica según P 4.
Cambio de forma por torsión
Para obtener una marcha uniforme, sobre todo en el caso de cigüeñales, el ángulo de torsión <f> con carga no debe ser demasiado grande
IJ d> = (en radianes) G/„
Velocidad angular (frecuencia) critica n, para vibraciones torsionales
Se presenta en ejes de gran longitud, grandes distancias entre apoyos y altas velocidades de rotación (rpm).
La frecuencia crítica nk se calcula según M 6
Velocidad angular de trabajo n =■ knk {k = 0.80 a 0.90)
Velocidad angular crítica n\ para vibraciones flexionales
i=m*
Carga simétrica n¿ — 6550 , / rpm
FP
Carga no simétrica
nk' = 1637 rrrr d Diámetro del eje (mm) I Longitud del eje (mm) / Momento de inercia del área (transversal) (mm4) (ver P 3) lp Momento polar de inercia del área (mm*) (ver P 7) £ Módulo de elasticidad axial (kgf/mm2) (ver Z 18 y Z 19) G Módulo de elasticidad angular (kgf/mm2) (ver Z 19) F Carga flexionante (kgf)
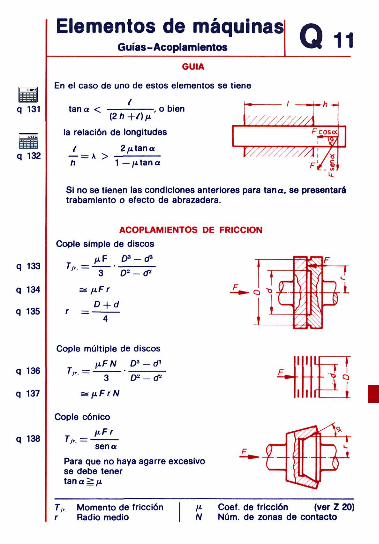
Elementos de máquinas Guías-Acoplamientos Q11
GUIA
En el caso de uno de estos elementos se tiene
tana < -, o bien (2 h+/)n
la relación de longitudes
/ 2/¿tana — = x > h 1 —/i tan a
/ —-j—f
Fcosa
V/////////Á\ F'4 %\
U.
Si no se tienen las condiciones anteriores para tana, se presentará trabamiento o efecto de abrazadera.
ACOPLAMIENTOS DE FRICCIÓN
T,r.=-
Cople simple de discos /xF 0 3 - ( p ~3~ O- - <P
¡ ¡iF r D + d M£
Copie múltiple de discos fiF N D* - <f-'
T,r. = -3 O2 - (P
¡IxFrN
Copie cónico pFr
Tf,=-sena
Para que no haya agarre excesivo se debe tener tan a a t i
Tfi. Momento de fricción r Radio medio
v- Coef. de fricción (ver Z 20) N Núm. de zonas de contacto
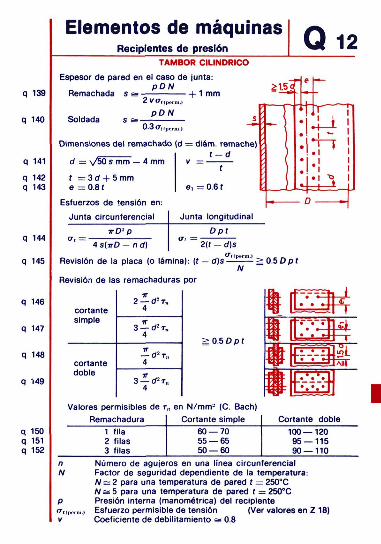
Elementos de máquinas Recipientes de presión Q 1 2
TAMBOR CILINDRICO
Espesor de pared en el caso de ¡unta: pDN
Remachada s as — h 1 mm
Soldada
2 Vocero,., pDN
O.J(7 t ( p e r m . |
Dimensiones del remachado {d = diám. remache) t-d
d = V50 s mm — 4 mm
t =3d + 5mm e = 0.8 r
Esfuerzos de tensión en:
Junta circunferencial
irD-p
t
e, = 0.61
Junta longitudinal
Dpt
2 ( t -4 s{irD — nd)
Revisión de la placa (o lámina): (í — d)s
Revisión de las remachaduras por
d)s
0.5 Dpt
cortante simple
cortante doble
2 - d ' T , . 4
3 - d ' T , . 4
- d * T „ 4
3 - < / 2 T „ 4
a 0.5 D p t
Valores permisibles de T „ en N/mm-' (C. Bach) Remachadura Cortante simple
I 1 IÉ É
• • — ■
• • • - ■
* * i
H--Í+ i — s - s -
4 t
AllJ
Cortante doble 1 fila 2 filas 3 filas
60 — 70 55 — 65 50 — 60
100-95-90-
120 ■115 ■110
Número de agujeros en una línea circunferencial Factor de seguridad dependiente de la temperatura: /Vas2 para una temperatura de pared t = 250°C N ■.— 5 para una temperatura de pared t = 250°C Presión interna (manométrica) del recipiente Esfuerzo permisible de tensión (Ver valores en Z 18) Coeficiente de debilitamiento a? 0.8
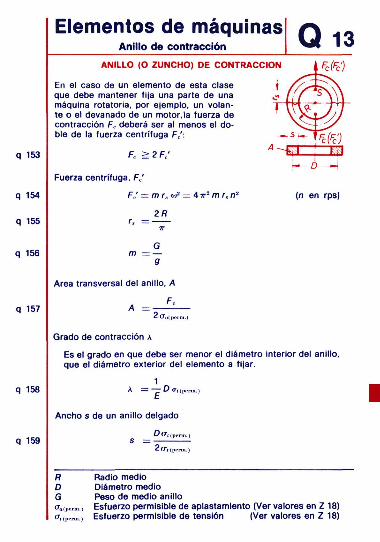
Elementos de máquinas Anillo de contracción Q 1 3
ANILLO (O ZUNCHO) DE CONTRACCIÓN
En el caso de un elemento de esta clase que debe mantener fija una parte de una máquina rotatoria, por ejemplo, un volante o el devanado de un motor.la fuerza de contracción F, deberá ser al menos el doble de la fuerza centrífuga F¿:
Fc >2F'
Fuerza centrífuga, Fc'
Fc' = m r, w2:
2 «
4 7r2 m r, rí'
4Sd j □ - D -
(n en rps)
9
Área transversal del anillo, A
Fc
t (To(j)erm.l
Grado de contracción A
Es el grado en que debe ser menor el diámetro interior del anillo. que el diámetro exterior del elemento a fijar.
A — D ff((perm.)
Ancho s de un anillo delgado
"<rt(perm.) S = —
2(7((perm.)
R Radio medio D Diámetro medio G Peso de medio anillo felpe™.) Esfuerzo permisible de aplastamiento (Ver valores en Z 18) tr>(pmn.) Esfuerzo permisible de tensión (Ver valores en Z 18)
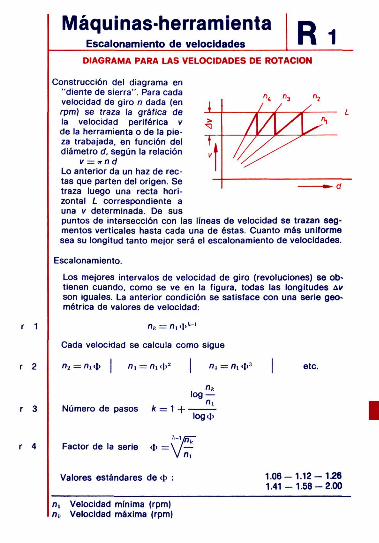
Máquinas-herramienta Escalonamiento de velocidades Ri
1 >
*t /
■e,
/ , J
'/ / L
//¿y m- d
DIAGRAMA PARA LAS VELOCIDADES DE ROTACIÓN
Construcción del diagrama en "diente de sierra". Para cada „ „ n velocidad de giro n dada (en rpm) se traza la gráfica de la velocidad periférica v de la herramienta o de la pieza trabajada, en función del diámetro d. según la relación
v = TÍ n d Lo anterior da un haz de rectas que parten del origen. Se traza luego una recta horizontal L correspondiente a una v determinada. De sus puntos de intersección con las líneas de velocidad se trazan segmentos verticales hasta cada una de éstas. Cuanto más uniforme sea su longitud tanto mejor será el escalonamiento de velocidades.
Escalonamiento.
Los mejores intervalos de velocidad de giro (revoluciones) se obtienen cuando, como se ve en la figura, todas las longitudes AV son iguales. La anterior condición se satisface con una serie geométrica de valores de velocidad:
nk = n , <|>"-'
Cada velocidad se calcula como sigue
n¿ = r>! <[> n.¡ = ni<l>2 n 4 = O! <t>3
log — Número de pasos k = 1 +
Factor de la serie <|> :
Valores estándares de <l> :
log<|>
1.06-1.12 — 1.26 1.41-1.58-2.00
n, Velocidad mínima (rpm) n, Velocidad máxima (rpm)
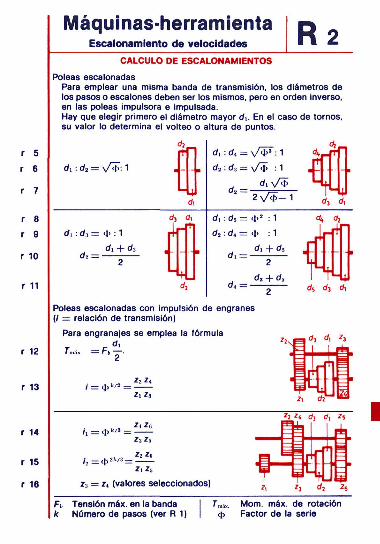
Máquinas-herramienta Escalonamiento de velocidades R2
CALCULO DE ESCALONAMIENTOS
Poleas escalonadas Para emplear una misma banda de transmisión, los diámetros de los pasos o escalones deben ser los mismos, pero en orden inverso, en las poleas impulsora e impulsada. Hay que elegir primero el diámetro mayor d,. En el caso de tornos, su valor lo determina el volteo o altura de puntos.
di: d2 = \AF: 1
d j _ d, :d4 = \AFF:1 di:d3 — \/ti> : 1
d i V *
<*«
d¿ = 2 \ / * - 1
d i : d3 = <|> : 1
d, + d3
d-, a,
d2 = -
d,:d¡= <|,2 : 1 d¿ : d, = <|) : 1
di + ds d3=-
d, = -
Poleas escalonadas con impulsión de engranes (/ = relación de transmisión)
Para engranajes se emplea la fórmula di
2 d, + ds
¡ — <t> <•/* tpi"* = -
d, tf, z 3
z, z,
ZlZ<¡
Z3Z5
Z2Zs
ZlZ¡
z3 = z4 (valores seleccionados)
;1 = q>M = -i
/,=*»"> = -
Fb Tensión máx. en la banda k Número de pasos (ver R 1)
Mom. máx. de rotación Factor de la serie

Máquinas-herramienta Fórmulas diversas Rs
Impulsión de una máquina-herramienta
Potencia del motor
Diámetro del eje o árbol
Momento de rotación en el eje de trabajo
P =-2-n-rnF
vF
5.1 T
D T = F —
2
Fuerza de corte (presión de viruta) F En tornos F =AK
btfK En fresadoras
Carga sobre el árbol de fresado P = 1.4 F
Resistencia específica del acero. K
K = 3 ajt
Resistencia a la tensión tr« en N/mm2
a
400
2.5
500
2.6
600
2.7
700
2.8
800
2.9
900
3.0
1000
3.2
Transmisión por banda
Tensión en la banda
Velocidad de la banda
Relación para el ancho S de una banda (N/mm)
2T P d vh
Vi = Trd,n
Anchura 6 en mm Esfuerzo permisible de tensión <r„ en N/mm-'
50
10
60
12
70
12
80
13
100
15
120
15
150
16
Ver en R 4 la explicación de los símbolos.
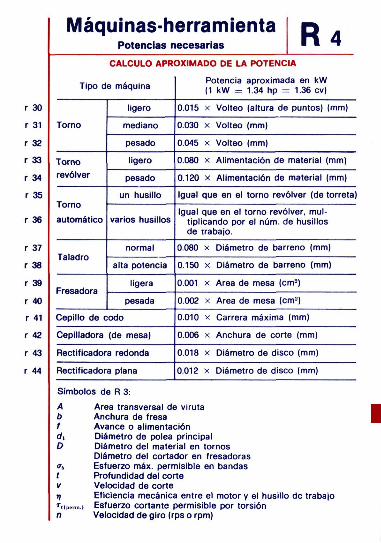
Máquinas-herramienta Potencias necesarias R4
CALCULO APROXIMADO DE LA POTENCIA
Tipo de máquina
Torno
Torno revólver
Torno automático
Taladro
ligero
mediano
pesado
ligero
pesado
un husillo
varios husillos
normal
alta potencia
ligera
pesada
Cepillo de codo
Cepilladora (de mesa)
Rectificadora redonda
Rectificadora plana
Potencia aproximada en kW (1 kW = 1.34 hp = 1.36 cv)
0.015 x Volteo (altura de puntos) (mm)
0.030 x Volteo (mm)
0.045 x Volteo (mm)
0.080 x Alimentación de material (mm)
0.120 x Alimentación de material (mm)
Igual que en el torno revólver (de torreta)
Igual que en el torno revólver, multiplicando por el núm de husillos de trabajo.
0.080 x Diámetro de barreno (mm)
0.150 x Diámetro de barreno (mm)
0.001 x Área de mesa (cm2)
0.002 x Área de mesa (cm2)
0.010 x Carrera máxima (mm)
0.006 x Anchura de corte (mm)
0.018 x Diámetro de disco (mm)
0.012 x Diámetro de disco (mm)
Símbolos de R 3: A b t d, D
Área transversal de viruta Anchura de fresa Avance o alimentación Diámetro de polea principal Diámetro del material en tornos Diámetro del cortador en fresadoras Esfuerzo máx. permisible en bandas Profundidad del corte Velocidad de corte Eficiencia mecánica entre el motor y el husillo de trabajo Esfuerzo cortante permisible por torsión Velocidad de giro (rps o rpm)

Electrotecnia Conceptos generales
MAGNITUDES PRINCIPALES Y SUS UNIDADES
s 1 Empleo de mayúsculas y minúsculas en símbolos En electrotecnia se emplean letras mayúsculas para designar cantidades constantes, y las correspondientes letras minúsculas —o las mayúsculas con el subíndice t— para designar cantidades que varían en el tiempo.
Ejemplos: Fórmulas s 8. s 9. s 13 Excepciones: I. <u, lm, Um, pTíl0. etc.
Trabajo eléctrico W El trabajo eléctrico equivale al trabajo mecánico definido en M 1. Al transformar energía, sin embargo, se presentan pérdidas.
Unidades: W • s (watt-segundo), kW • h, MW • h 1 W • s = 1 joule (J) = 1 N • m
Con las definiciones dadas en S 1 y S 2 se cumple que
U* s 2 W = I U t = — t = /'-' fí t
Potencia eléctrica P La potencia eléctrica equivale a la potencia mecánica definida en M 1. Sin embargo, al transformar potencia se presentan pérdidas. Unidades: W (watt), kW, MW
J N-m 1 W = 1 — = 1 s s
Con las definiciones dadas en S 1 y S 2 se cumple que
U* s 3 P = — = l-R
R
Frecuencia 1 Ver L 1 Período T Ver L 1 Frecuencia angular <u Ver L 1 Intensidad de corriente eléctrica /
Es una cantidad fundamental. Ver Explicaciones generales Unidades: A (ampere), mA, kA
La intensidad de corriente de 1 A se define en función de la fuerza de atracción entre dos conductores paralelos por los que circula corriente en uno y otro sentidos.
Si
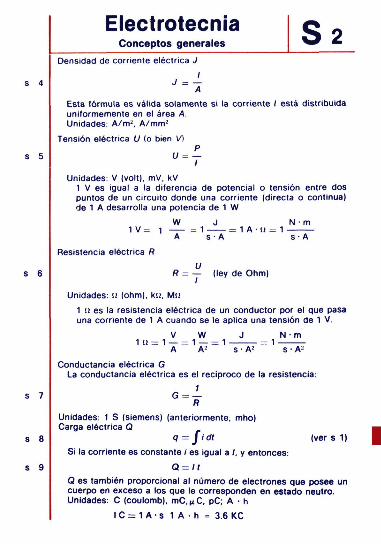
Electrotecnia Conceptos generales S2
Densidad de corriente eléctrica J
I = ~~Á
Esta fórmula es válida solamente si la corr iente I está distribuida uniformemente en el área A Unidades: A /m 2 , A / m m 2
Tensión eléctrica U (o bien V) P
U = — I
Unidades: V (volt). mV. kV 1 V es igual a la diferencia de potencial o tensión entre dos puntos de un circuito donde una corr iente (directa o continua) de 1 A desarrolla una potencia de 1 W
W J N - m 1 V = i = 1 = 1 A • 11 = 1
A s • A s • A
Resistencia eléctrica R
U R = — (ley de Ohm)
Unidades: t i (ohm). kn. Ms¡
1 i l es la resistencia eléctrica de un conductor por el que pasa una corriente de 1 A cuando se le aplica una tensión de 1 V.
V W J N m 1 i i = 1 — = 1 — = 1 = 1 -
A A2 s - A 2 s - A 2
Conductancia eléctrica G La conductancia eléctrica es el reciproco de la resistencia:
7 G = —
R
Unidades: 1 S (siemens) (anteriormente, mho) Carga eléctrica Q
q = Jidt (ver s 1)
Si la corriente es constante / es igual a /, y entonces:
Q = / f Q es también proporcional al número de electrones que posee un cuerpo en exceso a los que le corresponden en estado neutro. Unidades: C (coulomb), m C . n C , pC; A • h
I C = 1 A • s 1 A • h = 3.6 KC
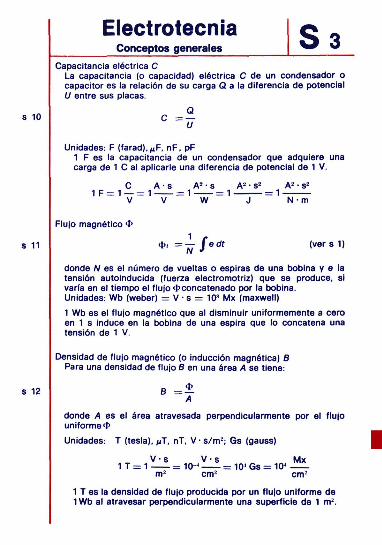
Electrotecnia Conceptos generales
Capacitancia eléctrica C La capacitancia (o capacidad) eléctrica C de un condensador o capacitor es la relación de su carga Q a la diferencia de potencial U entre sus placas.
Q c = ü
Unidades: F (farad).^F, nF, pF 1 F es la capacitancia de un condensador que adquiere una carga de 1 C al aplicarle una diferencia de potencial de 1 V.
C A s A 2 -s A 2 s 2 A2 -s2
1 F = 1 — = 1 = 1 = 1 = 1-V V W J N-m
Flujo magnético <l>
N J edt (ver s 1)
donde N es el número de vueltas o espiras de una bobina y e la tensión autoinducida (fuerza electromotriz) que se produce, si varía en el tiempo el flujo <l> concatenado por la bobina. Unidades: Wb (weber) = V • s = 108 Mx (maxwell)
1 Wb es el flujo magnético que al disminuir uniformemente a cero en 1 s induce en la bobina de una espira que lo concatena una tensión de 1 V.
Densidad de flujo magnético (o inducción magnética) B Para una densidad de flujo B en una área A se tiene:
B = *
donde A es el área atravesada perpendícularmente por el flujo uniforme* Unidades: T (tesla), i¿\, nT. V • s/m2; Gs (gauss)
V • s V ■ s Mx 1 T = 1 = 10-< = 104 Gs = 104
m2 cm2 cm2
1 T es la densidad de flujo producida por un flujo uniforme de 1 Wb al atravesar perpendícularmente una superficie de 1 m2.
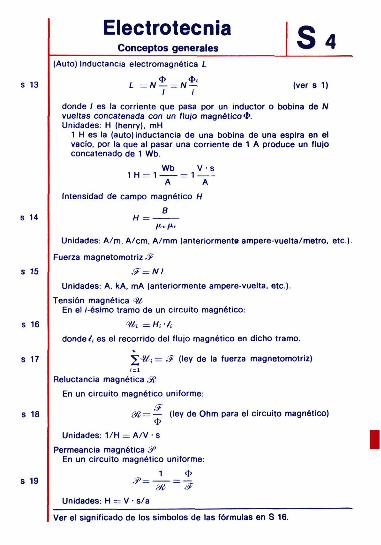
Electrotecnia Conceptos generales S4
(Auto) Inductancta electromagnética L
<l> <t>. L =N — = N— (ver s 1)
/ i donde / es la corriente que pasa por un inductor o bobina de N vueltas concatenada con un flujo magnét ico* . Unidades: H (henry), mH
1 H es la (auto) inductancia de una bobina de una espira en el vacío, por la que al pasar una corriente de 1 A produce un flujo concatenado de 1 Wb.
Wb V s 1 H = 1 = 1
A A
Intensidad de campo magnético H
B H
fJ.„fír
Unidades: A /m . A/cm. A /mm (anteriorment» ampere-vuelta/metro, etc.).
Fuerza magnetomotriz &
íf=N\ Unidades: A, kA, mA (anteriormente ampere-vuelta. etc.).
Tensión magnética ÚU En el /-ésimo tramo de un circuito magnético:
donde/, es el recorrido del flujo magnético en dicho tramo.
V ú U t = 9 (ley de la fuerza magnetomotriz) i = l
Reluctancia magnética á?
En un circuito magnético uniforme:
3 S = — (ley de Ohm para el circuito magnético) <1>
Unidades: 1/H = A/V ■ s
Permeancia magnética 3> En un circuito magnético uniforme:
1 _ <l>
Unidades: H = V • s/a
Ver el significado de los símbolos de las fórmulas en S 16.
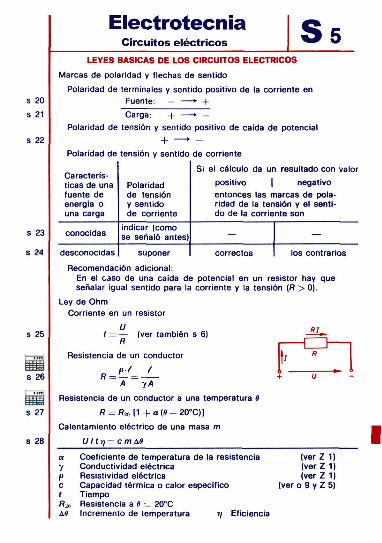
Electrotecnia Circuitos eléctricos
LEVES BÁSICAS DE LOS CIRCUITOS ELÉCTRICOS
Marcas de polaridad y flechas de sentido
Polaridad de terminales y sentido positivo de la corriente en
Fuente: — —► 4-Carga: + —► —
Polaridad de tensión y sentido positivo de caída de potencial
Polaridad de tensión y sentido de corriente
Características de una fuente de energía o una carga
conocidas
desconocidas
Polaridad de tensión y sentido de corriente
indicar (como se señaló antes)
suponer
Si el cálculo da un resultado con valor positivo negativo entonces las marcas de polaridad de la tensión y el sentido de la corriente son
-correctos
— los contrarios
Recomendación adicional: En el caso de una caída de potencial en un resistor hay que señalar igual sentido para la corriente y la tensión [R > 0).
Ley de Ohm Corriente en un resistor
/ = — (ver también s 6) R
Resistencia de un conductor
pV / R = — =
A yA
Resistencia de un conductor a una temperatura e
f? = fi2„ [1 + a (« - 20°C)]
Calentamiento eléctrico de una masa m
U ltr¡ = c m A«
a Coeficiente de temperatura de la resistencia y Conductividad eléctrica p Resistividad eléctrica c Capacidad térmica o calor específico f Tiempo fl2» Resistencia a 9 = 20°C A0 Incremento de temperatura T; Eficiencia
s
ra (ver Z 1) (verZ 1) (ver Z 1)
(ver o 9 y Z 5)
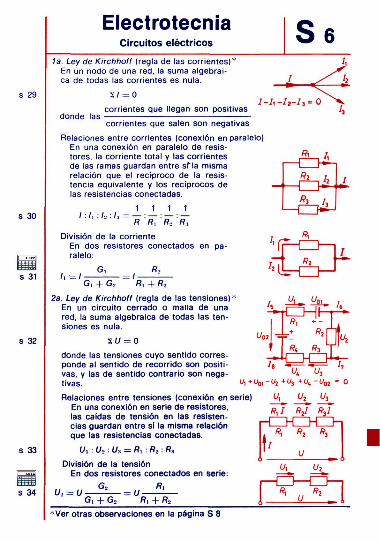
Electrotecnia Circuitos e léctr icos Se
1a. Ley de Kirchhoff (regla de las corrientes)* En un nodo de una red, la suma algebraica de todas las corrientes es nula.
donde las ■
■2.1 = 0
corrientes que llegan son positivas
corrientes que salen son negativas
Relaciones entre corrientes (conexión en paralelo) En una conexión en paralelo de resistores, la corriente total y las corrientes de las ramas guardan entre sf la misma relación que el recíproco de la resistencia equivalente y los recíprocos de las resistencias conectadas.
1 1 1 1
~R R~,'R¡'R~¡ División de la corriente
I ■'. : 1-2 ■■ l-.i -
En dos resistores conectados en paralelo:
ri = / -G,
:/-fi,
G, - f G,. R, + R.
2a. Ley de Kirchhoff (regla de las tensiones) ! !
En un circuito cerrado o malla de una red, la suma algebraica de todas las tensiones es nula.
s(V = 0
donde las tensiones cuyo sentido corresponde al sentido de recorrido son positivas, y las de sentido contrario son negativas.
Relaciones entre tensiones (conexión en serie) En una conexión en serie de resistores, las caídas de tensión en las resistencias guardan entre sí la misma relación que las resistencias conectadas.
U¡ : U, :Ut = Rt:R2: R,
División de la tensión En dos resistores conectados en serie:
G2 R, U, = U-
G, + G-. U-
R, + R2
•Ver otras observaciones en la página S 8
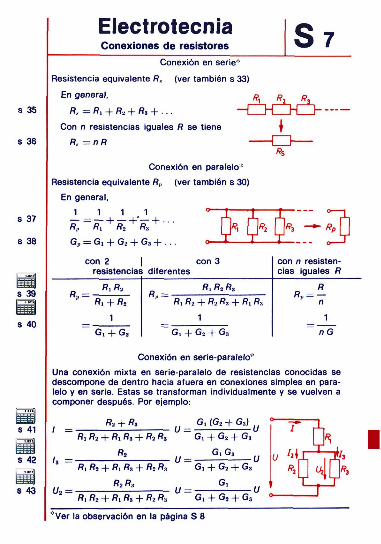
Electrotecnia Conexiones de resistores S7
Conexión en serie*
Resistencia equivalente R, (ver también s 33)
En general,
R,-R1 + R.¿ + R, + ... Con n resistencias ¡guales R se tiene
R,=nR
Conexión en paralelo"' Resistencia equivalente /?,, (ver también s 30)
En general,
1 1 1 . 1 Hp r í [ rf-2 Hg
G, = G, + G2 + Gs + . \ hff2 Mff, — /?P h
con 2 con 3 resistencias diferentes
con n resistencias iguales R
«„ = -" 1 " 2
«i + R2
1 G, + G2
« , = ■ ffl R¡ fts
R¡ ff2 + R2 R» + «i R» 1
G, + G2 + G3
1 _ ~ ñ " G ~
Conexión en serie-paralelo* Una conexión mixta en serie-paralelo de resistencias conocidas se descompone de dentro hacia afuera en conexiones simples en paralelo y en serle. Estas se transforman individualmente y se vuelven a componer después. Por ejemplo:
" 2 + "3
Í3 =
fi>
R
Ri + R\ Ra
R2
r?2 -f- r?i r?»
R 2 Ri
-f- H2 n 3
+ °2 H.1
G, (G2 + G3) ¡j
G
G
+ G2 + G» Gi G3
-f G2 + G» Gi
ffi H% -f" • * ! *"S i '■2 ■'3 u
G, + GÜ + Gs :Ver la observación en la página S 8
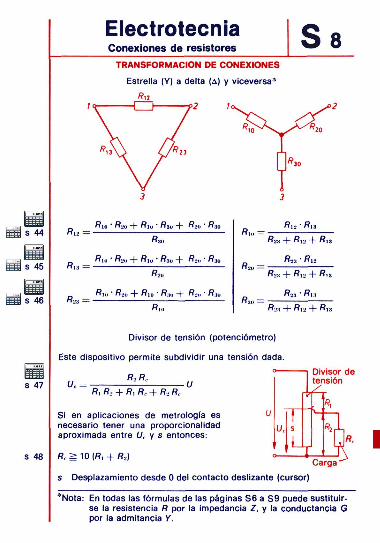
Electrotecnia Conexiones de resistores Ss
TRANSFORMACIÓN DE CONEXIONES
Estrella (Y) a delta (A) y viceversa*
«.:,
R¿J-
rf 111
filo
R,„
"20 + "10 ' ™3u + "20
rí;t(J
«a, + filo • R:m + R*. R-.«
■ R*, + fi.o ■ ff» + RJ»
' " no
' »»a<i
' *•;«» filo
fi,o:
«20 =
fi»0 —
R,-
R,
»« . + «
ff23
+ fi « 2 ,
fflJ
t + » t i
/?I2
1 + «13
fl.» flirt + fiíy + fii:i
Divisor de tensión (potenciómetro)
Este dispositivo permite subdlvidir una tensión dada
R, fl, Ur fl, R, + R, fl,. + R., Rr
-U
Si en aplicaciones de metrología es necesario tener una proporcionalidad aproximada entre Uc y s entonces:
RcaiO(R, + R2) Carga" s Desplazamiento desde 0 del contacto deslizante (cursor)
"Nota: En todas las fórmulas de las páginas S6 a S9 puede sustituirse la resistencia R por la ¡mpedancia Z, y la conductancia G por la admitancia Y.
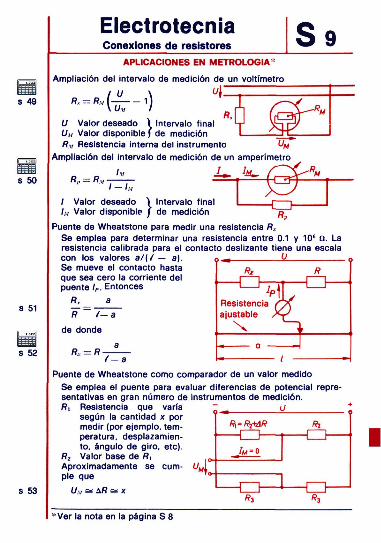
Electrotecnia Conexiones de resistores S9
APLICACIONES EN METROLOGÍA*
Ampliación del intervalo de medición de un voltímetro / u \ 4
"■=R"Ur-1) U Valor deseado ) Intervalo final U„ Valor disponible f de medición R„ Resistencia interna del instrumento
Ampliación del intervalo de medición de un amperímetro
Hp — HM I-IM
I Valor deseado lM Valor disponible
Intervalo final de medición
Puente de Wheatstone para medir una resistencia Rx Se emplea para determinar una resistencia entre 0.1 y 106 a. La resistencia calibrada para el contacto deslizante tiene una escala con los valores a/(/ — a). Se mueve el contacto hasta que sea cero la corriente del puente //>. Entonces
Rx _ a ~R~ / - a
de donde
U
RX = R-
■ O Resistencia ajustable
Puente de Wheatstone como comparador de un valor medido Se emplea el puente para evaluar diferencias de potencial representativas en gran número de instrumentos de medición. R, Resistencia que varía
según la cantidad x por medir (por ejemplo, temperatura, desplazamiento, ángulo de giro, etc).
R¿ Valor base de R, Aproximadamente se cumple que
*Ver la nota en la página S 8
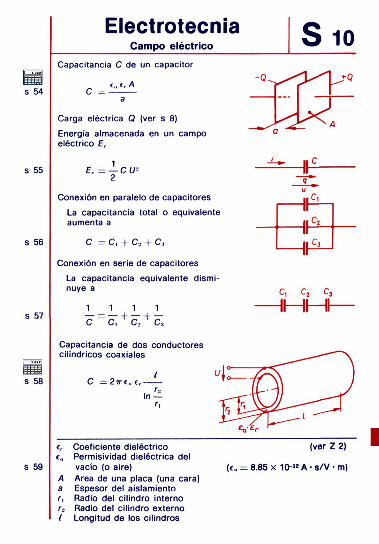
Electrotecnia Campo eléctrico S 10
Capacitancia C de un capacitor
t„i,A C =
a
Carga eléctrica Q (ver s 8) Energía almacenada en un campo eléctrico E,
¿X" -CU-
Conexión en paralelo de capacitores La capacitancia total o equivalente aumenta a
c =c, + c~ + c Conexión en serie de capacitores
La capacitancia equivalente disminuye a
1 C~
1 1 1
Capacitancia de dos conductores cilindricos coaxiales
-ZTTUÍ,
I n ri
«r Coeficiente dieléctrico e„ Permisividad dieléctrica del
vacio (o aire) A Área de una placa (una cara) a Espesor del aislamiento r, Radio del cilindro interno r¡ Radio del cilindro externo / Longitud de los cilindros
(ver Z 2)
(t„ = 8.85x 10- l 2A-s/V-m)
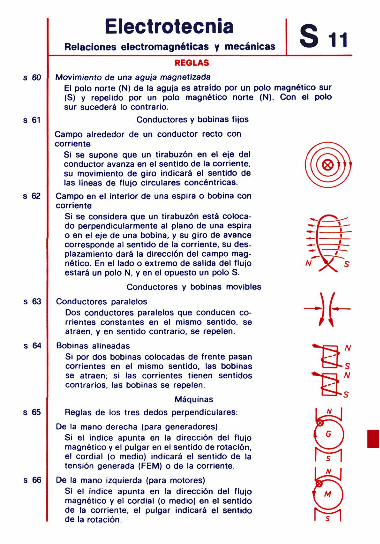
Electrotecnia Relaciones electromagnéticas y mecánicas S11
— I I -
REGLAS
Movimiento de una aguja magnetizada El polo norte (N) de la aguja es atraído por un polo magnético sur (S) y repelido por un polo magnético norte (N). Con el polo sur sucederá lo contrario.
Conductores y bobinas fijos
Campo alrededor de un conductor recto con corriente
Si se supone que un tirabuzón en el eje del conductor avanza en el sentido de la corriente, su movimiento de giro indicará el sentido de las líneas de flujo circulares concéntricas.
Campo en el interior de una espira o bobina con corriente
Si se considera que un tirabuzón está colocado perpendicularmente al plano de una espira o en el eje de una bobina, y su giro de avance corresponde al sentido de la corriente, su desplazamiento dará la dirección del campo magnético. En el lado o extremo de salida del flujo estará un polo N, y en el opuesto un polo S.
Conductores y bobinas movibles
Conductores paralelos Dos conductores paralelos que conducen corrientes constantes en el mismo sentido, se atraen, y en sentido contrario, se repelen.
Bobinas alineadas Si por dos bobinas colocadas de frente pasan corrientes en el mismo sentido, las bobinas se atraen; si las corrientes tienen sentidos contrarios, las bobinas se repelen.
Máquinas Reglas de los tres dedos perpendiculares:
De la mano derecha {para generadores} Si el índice apunta en la dirección del flujo magnético y el pulgar en el sentido de rotación, el cordial (o medio) indicará el sentido de la tensión generada {FEM) o de la corriente.
De la mano izquierda (para motores) Si el índice apunta en la dirección del flujo magnético y el cordial (o medio) en el sentido de la corriente, el pulgar indicará el sentido de la rotación.
m M
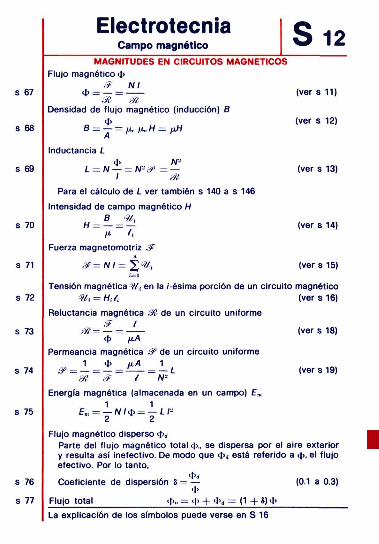
Electrotecnia Campo magnético S12
MAGNITUDES EN CIRCUITOS MAGNÉTICOS Flujo magnético <|>
á* NI <t> = — = (ver s 11)
Densidad de flujo magnético (inducción) B <J> (ver s 12)
Inductancia L <|> N-
L = N — = N-0> = — / 0t
Para el cálculo de L ver también s 140 a s 146 Intensidad de campo magnético H
B <Ui H = — = —
H h Fuerza magnetomotriz í'f
#=N/ = ¿«/i
(ver s 13)
(ver s 14)
(ver s 15)
Tensión magnética "?/j en la /-ésima porción de un circuito magnético <Ui = H¡/¡ (ver s 16)
Reluctancia magnética ?X- de un circuito uniforme 9 1
Permeancia magnética SP de un circuito uniforme 1 <l> ¡x.A 1
~m~~&~~T~N~-Energía magnética (almacenada en un campo) Em
Em = — NI<p = — LI-2 2
(ver s 18)
(ver s 19)
Flujo magnético disperso <pd Parte del flujo magnético total <|>„ se dispersa por el aire exterior y resulta así inefectivo. De modo que <l>,, está referido a <|>, el flujo efectivo. Por lo tanto,
Coeficiente de dispersión 8 = —
Flujo total <|>„ = (|> + <l>i = (1 + 8) .|>
(0.1 a 0.3)
La explicación de los símbolos puede verse en S 16
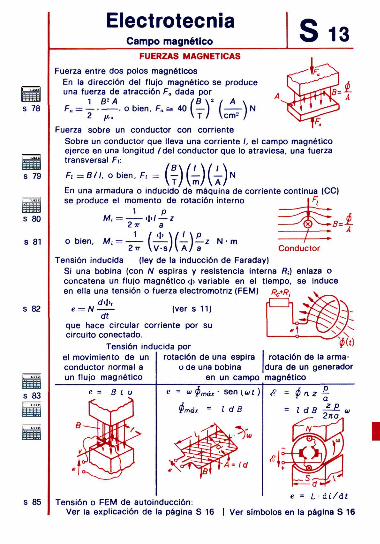
Electrotecnia Campo magnético S 13
FUERZAS MAGNÉTICAS
Fuerza entre dos polos magnéticos En la dirección del flujo magnético se produce una fuerza de atracción F„ dada por
1 B'A IB \' i A \ Fa = o bien. F „ ~ 40 ( —) I )N
2 (i, V T / \crn-' I Fuerza sobre un conductor con corriente
Sobre un conductor que lleva una corriente /, el campo magnético ejerce en una longitud /de l conductor que lo atraviesa, una fuerza transversal Fr.
..B„. oblen, * = (£)(1)(1)N En una armadura o inducido de máquina de corriente continua (CC) se produce el momento de rotación interno I F,
i n ifc—■-M¡
2 T T • < 1 > I - =3fc*4
o bien, Mt=JL[±\(L\Lt N. 2 T \ v s / \ A / a Conductor
Tensión inducida (ley de la inducción de Faraday) Si una bobina (con N espiras y resistencia interna R¡) enlaza o concatena un flujo magnético <i> variable en el tiempo, se induce en ella una tensión o fuerza electromotriz (FEM) ffc*ff-
d<l>, e = N (ver s 11)
df que hace circular corriente por su circuito conectado.
Tensión inducida por el movimiento de un conductor normal a un flujo magnético
rotación de una espira o de una bobina
0(0 rotación de la arma-
jdura de un generador en un campo magnético
e - <" $má, ■ sen^o/í)
$má* = IdB
B — L ' d Í/(Í t Tensión o FEM de autoinducción:
Ver la explicación de la página S 16 | Ver símbolos en la página S 16
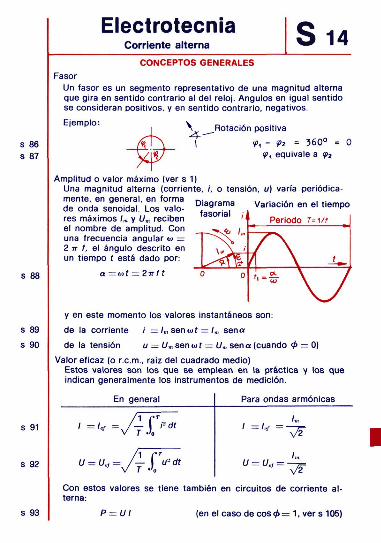
Electrotecnia Corriente alterna 14
CONCEPTOS GENERALES Fasor
Un fasor es un segmento representativo de una magnitud alterna que gira en sentido contrario al del reloj. Ángulos en igual sentido se consideran positivos, y en sentido contrario, negativos. Ejemplo:
w~ V ^Rotación positiva
9,-92 = 360° = 0 9, equivale a 9¡
Amplitud o valor máximo (ver s 1) Una magnitud alterna (corriente, i. o tensión, o) varía periódicamente, en general, en forma Diagrama Variación en el tiempo de onda senoidal. Los valores máximos / „ y U„ reciben el nombre de amplitud. Con una frecuencia angular u> = 2 ir f, el ángulo descrito en un tiempo í está dado por:
a = v>t = 2irft
y en este momento los valores instantáneos son: de la corriente / = / „ sen OJ f = / „ sena de la tensión u = Um sen tot = Um sen a (cuando <j> = 0)
Valor eficaz (o r.c.m., raíz del cuadrado medio) Estos valores son los que se emplean en la práctica y los que indican generalmente los instrumentos de medición.
fasorial ,
) o
Periodo T=\lt
f\ \ tm
En general
' ='* V r f™ u = u«=jT$!*dt
Para ondas armónicas
1» 1 ='" = vr </ = </, = £
Con estos valores se tiene también en circuitos de corriente alterna:
P = UI (en el caso de eos $ = 1, ver s 105)
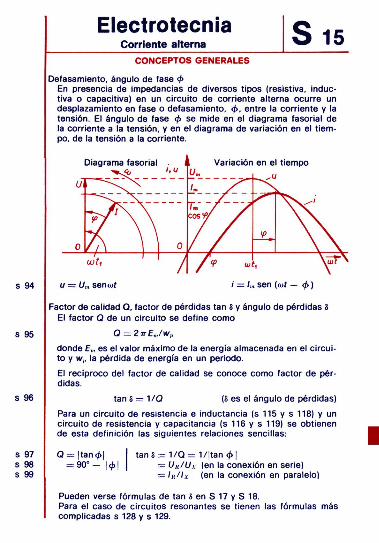
Electrotecnia Corriente alterna S 15
CONCEPTOS GENERALES
Defasamiento. ángulo de fase </> En presencia de impedancias de diversos tipos (resistiva, inductiva o capacitiva) en un circuito de corriente alterna ocurre un desplazamiento en fase o defasamiento, <p, entre la corriente y la tensión. El ángulo de fase <f> s e mide en el diagrama fasorial de la corriente a la tensión, y en el diagrama de variación en el tiempo, de la tensión a la corriente.
Diagrama fasorial Variación en el tiempo
/ = /„ sen (c«f — <f>)
Factor de calidad Q, factor de pérdidas tan 8 y ángulo de pérdidas 8 El factor Q de un circuito se define como
Q = 2TrE„/w„ donde E„ es el valor máximo de la energía almacenada en el circuito y w„ la pérdida de energía en un periodo. El recíproco del factor de calidad se conoce como factor de pérdidas.
tan s = 1/Q (8 es el ángulo de pérdidas) Para un circuito de resistencia e inductancia (s 115 y s 118) y un circuito de resistencia y capacitancia (s 116 y s 119) se obtienen de esta definición las siguientes relaciones sencillas:
Q = |tan</>| I tan 8 = 1/Q = 1/|tan <f> | = 90°— \<f>\ | =UR/Ux (en la conexión en serie)
= ' / ¡ / 'A (en la conexión en paralelo)
Pueden verse fórmulas de tan 8 en S 17 y S 18. Para el caso de circuitos resonantes se tienen las fórmulas más complicadas s 128 y s 129.
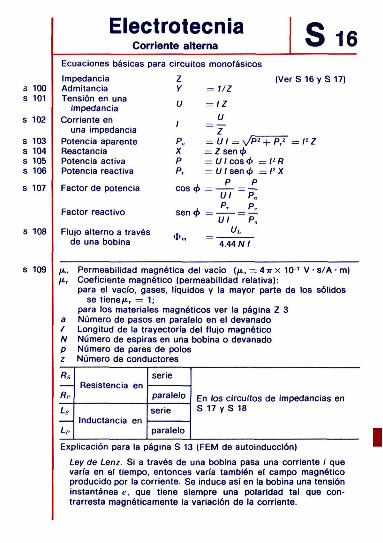
Electrotecnia Corriente alterna 16
Ecuaciones básicas para circuitos monofásicos Impedancia Admitancia Tensión en una
impedancia Corriente en
una impedancia Potencia aparente Reactancia Potencia activa Potencia reactiva
Factor de potencia
Factor reactivo
Flujo alterno a través de una bobina
Z Y
eos <p
= 1/Z = IZ _ U
~T = UI = \/P2 + P2
= Z sen <¡> = Ulcos<t> =I2R = Ulsen<f> = I2X
P _ P P„ P,
Ul ~ P„ UL
(VerS 16 y S 17)
Ul P,
sen <j> = — — =
= I 2 Z
4.44 N /
Permeabilidad magnética del vacío (/*„ = 4 ir x 10-' V • s/A • m) Coeficiente magnético (permeabilidad relativa): para el vacío, gases, líquidos y la mayor parte de los sólidos
se tiene/i r = 1; para los materiales magnéticos ver la página Z 3 Número de pasos en paralelo en el devanado Longitud de la trayectoria del flujo magnético Número de espiras en una bobina o devanado Número de pares de polos Número de conductores
R.s
Re Ls
LP
Resistencia en
Inductancia en
serie
paralelo serie
paralelo
En los circuitos de impedancias en S 17 y S 18
Explicación para la página S 13 (FEM de autoinducción) Ley de Lenz. Si a través de una bobina pasa una corriente / que varía en el tiempo, entonces varía también el campo magnético producido por la corriente. Se induce así en la bobina una tensión instantánea < , que tiene siempre una polaridad tal que contrarresta magnéticamente la variación de la corriente.
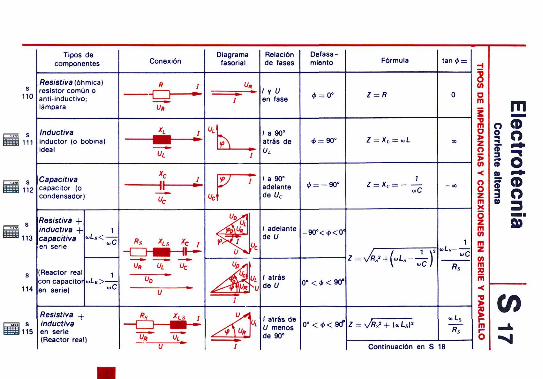
Tipos de componentes
Diagrama fasonal
Relación de fases
Def a Sarniento
5 en o
3 > z g > < o o z m x O z ni
/?es/st/Va (óhmica) resistor común o anti-inductivo; lámpara
1 I
"Q—-í y ü en fase * = 0°
Inductiva ¡nductor (o bobina) ideal
/ a 90' atrás de ¿ = 9 0 ' Z=X,, = mL
Capacitiva capacitor (o condensador)
V I I a 90° adelante de U,
Resistiva inductiva + capacitiva en serie
Reactor real con capacitor en serie)
,U<-*LS *C ]
u* 14 Uc
I adelante de U -9O'<*<0'
■U>- V Z = v42-f(«i.s--¿)'
I atrás de u 0" < * < 90*
Resistiva + inductiva en serie (Reactor real) ü» tt
/ atrás de U menos de 90°
0° <*<90° Z = \/S7TuIs)" I
Continuación en S 18
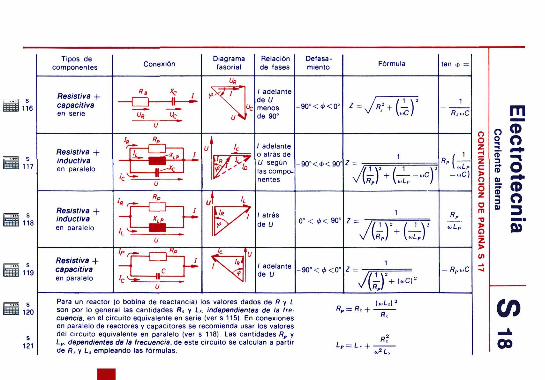
Tipos de componentes
Diagrama fasorial
Relación de fases
Defasa-miento
Resistiva + capacitiva en serie
/ adelante de U menos de 90°
-90 0 <<í><0 0 (¿r Resistiva + inductiva en paralelo V-
k
'X I adelante o atrás de
las componentes ví¿H¿--) -0 ,C)
Resistiva -f-inductiva en paralelo
/ atrás de U y(¿)2+(¿y
Resistiva -+-capacitiva en paralelo N¡ / adelante
de U V® + (.-o-Para un reactor (o bobina de reactancia) los valores dados de R y L son por lo general las cantidades R5 y L5. independientes de la frecuencia. en el circuito equivalente en sene (ver s 115) En conexiones en paralelo de reactores y capacitores se recomienda usar los valores del circuito equivalente en paralelo (ver s 118) Las cantidades Rp y Lp. dependientes de la frecuencia, de este circuito se calculan a partir de Rs y Ls empleando las fórmulas:
:ftS + -
Rf W* Ls
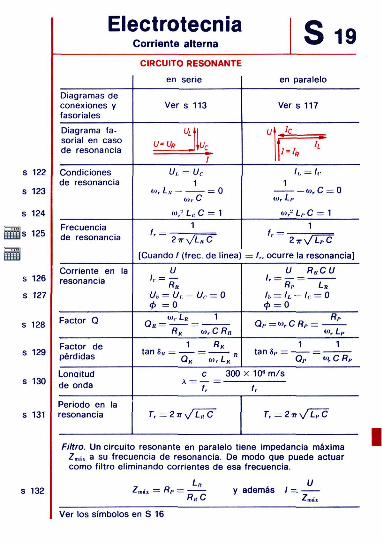
Electrotecnia Corriente alterna S 19
CIRCUITO RESONANTE
Diagramas de conexiones y fasoriales
Diagrama fa-sorial en caso de resonancia
Condiciones de resonancia
Frecuencia de resonancia
Corriente en la resonancia
Factor Q
Factor de pérdidas
Lonaitud de onda
Periodo en la resonancia
en serie
Ver s 113
UL
U'Uf, Vc
I u,. = uc
1 u>, L„ = 0
tlir C m,~ L„ C = 1
1
2 7T \JL„ C
[Cuando f (frec. de línea;
U l, = —
RR Ui = UL-Uc = 0 4> = 0
QR-~RT' 1
0), C RR
1 RR tan S„ = = , R
QR M,LR
c 300
Tr = 2Tr^/L„C
en paralelo
Ver s 117
U ,/c
h. = lo 1
o j r C = 0
i»r Lr C = 1
u
= Ir. OC
h--<#> =
Q , . =
t a ñ í ,
1
2 7 r V - / C
urre la resonancia]
U RRCU
/?,. LR
= lL - lc = 0 = 0
Rr
t»rLP
1 1
QP «V C RP
x 10" m/s
1,
Tr — 2iry/~L7C
Filtro. Un circuito resonante en paralelo tiene ¡mpedancia máxima Zm ¡ > a su frecuencia de resonancia. De modo que puede actuar como fi l tro el iminando corrientes de esa frecuencia.
:/?,. = -R,,C
y además / = -U
Ver los símbolos en S 16
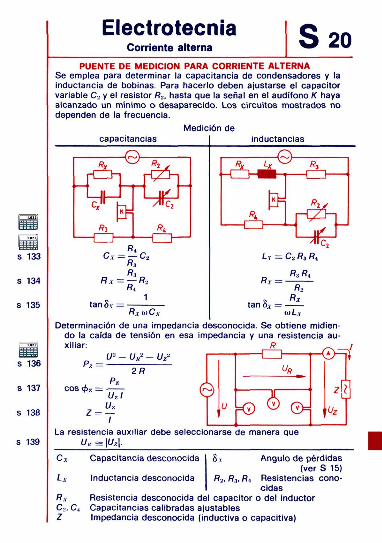
Electrotecnia Corriente alterna S 20
PUENTE DE MEDICIÓN PARA CORRIENTE ALTERNA Se emplea para determinar la capacitancia de condensadores y la inductancia de bobinas. Para hacerlo deben ajustarse el capacitor variable C¿ y el resistor Rz. hasta que la señal en el audífono K haya alcanzado un mínimo o desaparecido. Los circui tos mostrados no dependen de la frecuencia.
Medición de capacitancias inductancias
^3^
EH - * 2 _
C.v
tan hx
R, - — i
R3
/ ? 4 ' 1
R.\ O) C.v
Determinación de una impedancia desconocida. Se obtiene midien do la caída de tensión en esa impedancia y una resistencia au xiliar: R
Pz =
COS <frz
2
u> - u,? - u¿> 2R
Pz
Uz
T
0
HZZr-uB
K3 "5" QH • uz
La resistencia auxiliar debe seleccionarse de manera que U„ = \U*\.
C ,
í-,
Capacitancia desconocida
Inductancia desconocida
8., Ángulo de pérdidas (ver S 15)
R-2- R-.i- Rt Resistencias conocidas
R.v Resistencia desconocida del capacitor o del inductor C_., C, Capacitancias calibradas ajustables Z Impedancia desconocida (inductiva o capacitiva)

Electrotecnia Corriente alterna S21
INDUCTANCIA L DE BOBINAS CON NÚCLEO DE AIRE
Cálculo de L a partir de la impedancia y la resistencia.
Se hace pasar una densidad de corriente (J = l/A su 3 A/mm-) y se mide la tensión terminal U, la corriente / y la potencia activa P.
Impedancia Z = — Resistencia R -.
V^7 R-
Cálculo de L para una bobina toroidal (de anillo)
/ t„ h N- r-.
Cálculo de L para una bobina de disco con sección rectangular
D u
< 1
> 1
£ 3
Inductancia
L = I O 5 O W V 0 ' " H
L = I O 5 S ) N 2 V / ( ! ) , I H Los valores ya no son aceptables
V-s V.H = 10-»
A
a Ancho radial de la bobina A Área transversal del conductor b Grueso axial de la bobina de Diámetro exterior del conductor con aislamiento D Diámetro medio de la bobina /¡ Longitud del contorno interior del hueco /m Longitud media del enrollamiento (/„ = /¡ + ira) N Número de espiras o vueltas p Perímetro de la sección transversal de la bobina a Relación a : b
ti Grado de aflojamiento en la bobina (^¡jy
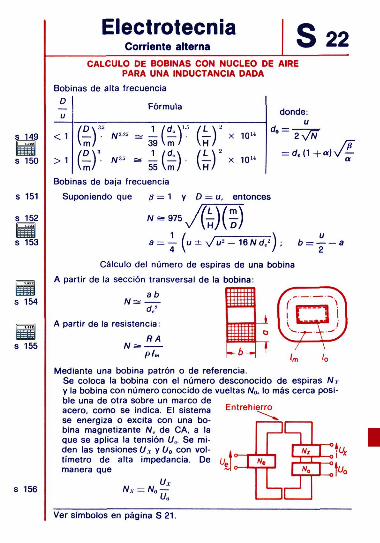
Electrotecnia Corriente alterna 22
CALCULO DE BOBINAS CON NÚCLEO DE AIRE PARA UNA INDUCTANCIA DADA
Bobinas de alta frecuencia D
< 1
> 1
Fórmula
( £ ) % « „ ±(*Y? (!)'xio« Vm/ 39 V m / \ H /
\7ñ/ * 55 \m7 \ H /
donde:
d„ = 2VÑ"
= d„(1+arj
Bobinas de baja frecuencia Suponiendo que # = 1
N a-975
y D = u, entonces
u í> = — -
2 Cálculo del número de espiras de una bobina
A partir de la sección transversal de la bobina:
N a ab
N¡
A partir de la resistencia: RA JL
Mediante una bobina patrón o de referencia. Se coloca la bobina con el número desconocido de espiras Nx y la bobina con número conocido de vueltas N0, lo más cerca posible una de otra sobre un marco de acero, como se indica. El sistema se energiza o excita con una bobina magnetizante Ne de CA, a la que se aplica la tensión Ue. Se miden las tensiones Ux y U0 con voltímetro de alta impedancia. De manera que
Entrehierro
U,
N,
a \u0
Ver símbolos en página S 21.
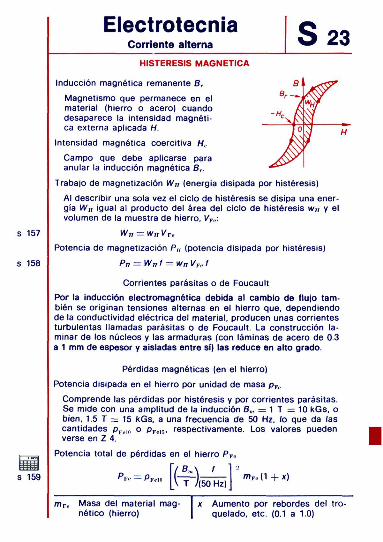
Electrotecnia Corriente alterna 23
el
10
r*^
H
HISTERESIS MAGNÉTICA
Inducción magnética remanente 6 r
Magnetismo que permanece en el material (hierro o acero) cuando desaparece la intensidad magnética externa aplicada H.
Intensidad magnética coercitiva Hc
Campo que debe aplicarse para anular la inducción magnética 6,.
Trabajo de magnetización WH (energía disipada por histéresis) Al describir una sola vez el ciclo de histéresis se disipa una energía WH igual al producto del área del ciclo de histéresis wH y el volumen de la muestra de hierro, V¥e:
WH = wH VT, Potencia de magnetización P„ (potencia disipada por histéresis)
P„ = WHI = w„Vr,t
Corrientes parásitas o de Foucault Por la inducción electromagnética debida al cambio de flujo también se originan tensiones alternas en el hierro que. dependiendo de la conductividad eléctrica del material, producen unas corrientes turbulentas llamadas parásitas o de Foucault. La construcción laminar de los núcleos y las armaduras (con láminas de acero de 0.3 a 1 mm de espesor y aisladas entre sí) las reduce en alto grado.
Pérdidas magnéticas (en el hierro) Potencia disipada en el hierro por unidad de masa pF,
Comprende las pérdidas por histéresis y por corrientes parásitas. Se mide con una amplitud de la inducción B„ = 1 T = 10 kGs, o bien. 1.5 T = 15 kGs. a una frecuencia de 50 Hz, lo que da las cantidades pFeW o pF d í , respectivamente. Los valores pueden verse en Z 4.
Potencia total de pérdidas en el hierro Pre
. Sm \ t V T /( '(50 Hz)
"Jr«(1 + x )
Masa del material magnético (hierro)
Aumento por rebordes del troquelado, etc. (0.1 a 1.0)
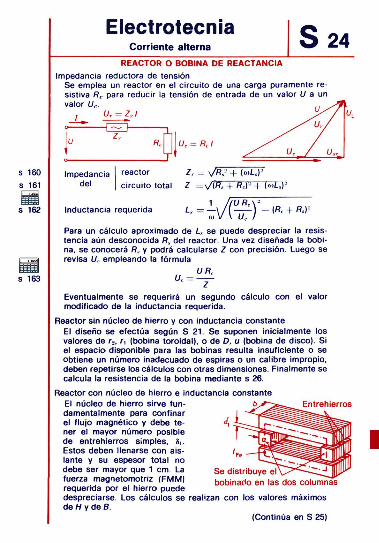
Electrotecnia Corr iente a l terna 24
REACTOR O BOBINA DE REACTANCIA Impedancia reductora de tensión
Se emplea un reactor en el circuito de una carga puramente resistiva Rv para reducir la tensión de entrada de un valor U a un valor Uc
} Ur = Zr 1
o T
mpedancia reactor del 1 circuito tota
\Ur = Rr 1 / ^
1 / uc_ Zr = x/B,= + (wí.,1-z =V (« . + Re)- + l » U !
Ur/
/ u„
"l
Inductancia requerida L, = i\A?y (R + R,)-
Para un cálculo aproximado de Ls se puede despreciar la resistencia aún desconocida Rs del reactor. Una vez diseñada la bobina, se conocerá R, y podrá calcularse Z con precisión. Luego se revisa Uc empleando la fórmula
UR, Uc =
Z Eventualmente se requerirá un segundo cálculo con el valor modificado de la inductancia requerida.
Reactor sin núcleo de hierro y con inductancia constante El diseño se efectúa según S 21. Se suponen inicialmente los valores de r¡. r, (bobina toroidal), o de D, u (bobina de disco). Si el espacio disponible para las bobinas resulta insuficiente o se obtiene un número inadecuado de espiras o un calibre impropio, deben repetirse los cálculos con otras dimensiones. Finalmente se calcula la resistencia de la bobina mediante s 26.
Reactor con núcleo de hierro e inductancia constante El núcleo de hierro sirve fundamentalmente para confinar el flujo magnético y debe tener el mayor número posible de entrehierros simples, s,. Estos deben llenarse con aislante y su espesor total no debe ser mayor que 1 cm. La fuerza magnetomotriz (FMM) requerida por el hierro puede despreciarse. Los cálculos se realizan con los valores máximos de H y de B.
(Continúa en S 25)
Entrehierros
Se distribuye e l \ bobinado en las dos columnas
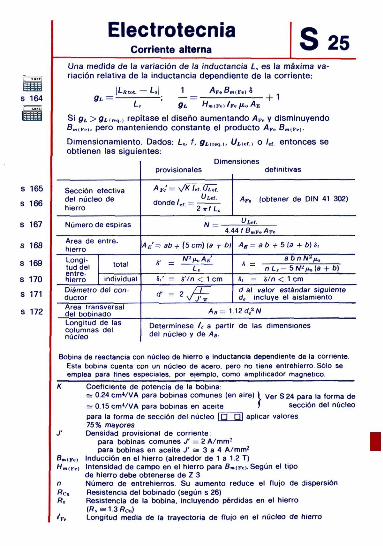
Electrotecnia Corriente alterna S 25
Una medida de la variación de la inductancia Ls es la máxima variación relativa de la inductancia dependiente de la corriente:
ffi. = -AwtBmtr*) S
+ 1 Ls gL HmtVt.)/FtfittA^
Si gL > fltími.) repítase el diseño aumentando AFf. y disminuyendo 8m(v*), pero manteniendo constante el producto AF* 6m { P í , .
Dimensionamiento. Dados: Ls, f, gLtnq.u ULt<t.} o /e(. entonces se obtienen las siguientes:
Dimensiones provisionales defini t ivas
Sección efectiva del núcleo de hierro
AF¿= y/K let. ÜLrt.
donde /e f — 2 *t Ls
A F e (obtener de DIN 41 302)
Número de espiras N 4 .44 /B, F ,A F ,
Área de entre-hierro A B ' = ab + ( 5 c m ) [a + t» AB = ab + 5 (a + b)
a bn N2^, Longitud del entre-hierro
Ls nLs- SN*i*,{a + b) h/n < 1 cm
Diámetro del conductor Área transversal del bobinaao
*& d al valor estándar siguiente d e incluye el aislamiento
AB= 1.12 de2W
Longitud de las columnas del núcleo
Determínese tc a partir de las dimensiones del núcleo y de As-
Bobina de reactancia con núcleo de hierro e inductancla dependiente de la corriente. Esta bobina cuenta con un núcleo de acero, pero no tiene entrehierro. Sólo se emplea para fines especiales, por ejemplo, como amplificador magnético.
K Coeficiente de potencia de la bobina: =« 0.24 c m V V A para bobinas comunes (en aire) t ve r S 24 para la forma de SÍ 0.15 c m V V A para bobinas en aceite f sección del núcleo para la forma de sección del núcleo ! □ Q | aplicar valores 75% mayores
J' Densidad provisional de corr iente: para bobinas comunes J' — 2 A / m m 2
para bobinas en aceite / ^ 3 a 4 A / m m 2
Inducción en el hierro (alrededor de 1 a 1.2 T) Intensidad de campo en el hierro para B B I F , - I . Según el t ipo de hierro debe obtenerse de Z 3. Número de entrehierros. Su aumento reduce el f lujo de dispersión Resistencia del bobinado (según s 26) Resistencia de la bobina, incluyendo pérdidas en el hierro ( /? s «1.3 f fo«) Longi tud media de la trayectoria de f lu jo en el núcleo de hierro
« . i i
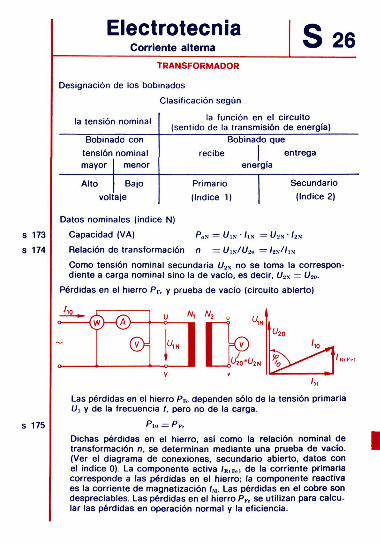
Electrotecnia Corriente alterna S 26
TRANSFORMADOR
Designación de los bobinados Clasificación según
la tensión nominal la función en el circuito (sentido de la transmisión de energía)
Bobinado con tensión nominal mayor menor
Bobinado que recibe entrega
energía
Primario (índice 1)
Secundario (índice 2)
P«N = U n • / I N = U-,* ■ / ,„
n = U1N/(J.„ = W / I N
Alto Bajo voltaje
Datos nominales (índice N) Capacidad (VA) Relación de transformación Como tensión nominal secundaria U2X no se toma la correspondiente a carga nominal sino la de vacío, es decir, U2S = U2„.
Pérdidas en el hierro PFe y prueba de vacio (circuito abierto)
Las pérdidas en el hierro PFe dependen sólo de la tensión primaria U, y de la frecuencia f, pero no de la carga.
"lo = Pre
Dichas pérdidas en el hierro, así como la relación nominal de transformación n, se determinan mediante una prueba de vacío. (Ver el diagrama de conexiones, secundario abierto, datos con el índice 0). La componente activa /RIFO de la corriente primaria corresponde a las pérdidas en el hierro; la componente reactiva es la corriente de magnetización ÍM. Las pérdidas en el cobre son despreciables. Las pérdidas en el hierro PFe se utilizan para calcular las pérdidas en operación normal y la eficiencia.
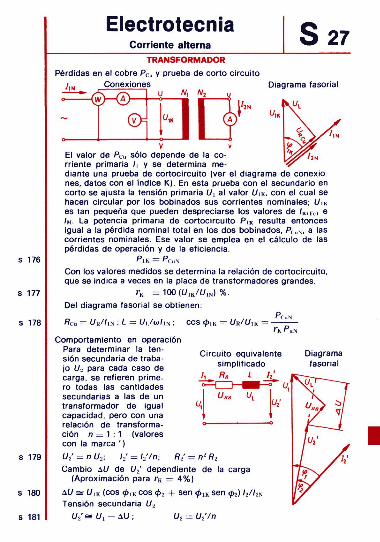
Electrotecnia Corr iente a l terna 27
TRANSFORMADOR Pérdidas en el cobre Pc„ y prueba de corto circuito
Conexiones «i N*
Diagrama fasorial
El valor de Pc<l sólo depende de la corriente primarla /, y se determina mediante una prueba de cortocircuito (ver el diagrama de conexiones, datos con el índice K). En esta prueba con el secundario en corto se ajusta la tensión primaria U. al valor UIK , con el cual se hacen circular por los bobinados sus corrientes nominales; t/n< es tan pequeña que pueden despreciarse los valores de /R(Fe> e
ÍM- La potencia primaria de cortocircuito P i K resulta entonces igual a la pérdida nominal total en los dos bobinados, PCuN, a las corrientes nominales. Ese valor se emplea en el cálculo de las pérdidas de operación y de la eficiencia.
PlK = P(\,N Con los valores medidos se determina la relación de cortocircuito, que se indica a veces en la placa de transformadores grandes.
rK = 100 (U1K/fJ1N) %. Del diagrama fasorial se obtienen:
«o, = UR/lm : L = Ui/ali» ; eos <j>,K = ÜR/WIK **K PaN
Circuito equivalente simplificado
Comportamiento en operación Para determinar la tensión secundaria de trabajo Uj para cada caso de carga, se refieren primero todas las cantidades secundarias a las de un transformador de igual capacidad, pero con una relación de transformación n = 1 : 1 (valores con la marca ' }
U{ = n U2; \{ = ; 2 ' / n ; fl2' = n2 fl2
Cambio Aü de U{ dependiente de la carga (Aproximación para rK = 4 % |
AU=~U1K(cos 01Kcos<£2 + sen (¿>1Ksen <fc>) i2//;
Tensión secundaria U2
U¿ a (/, - MJ : U2 — U2'/n
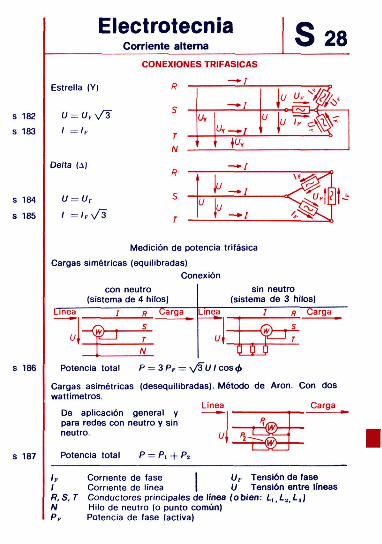
Electrotecnia Corriente alterna S 28
Estrella (Y|
I =1,
Delta (A¡
U = Ur
I =lr\/3
CONEXIONES TRIFÁSICAS
Medición de potencia trifásica Cargas simétricas (equilibradas)
Conexión
Linea
U
con neutro (sistema de 4 hilos)
; /) Carga f \ t\ , s
£_l T N
sin neutro (sistema de 3 hilos)
Línej ; R Carga
U I
(w\ i s
, I L j r
i b o Potencia total P = 3 P, = V ^ U / eos <
Cargas asimétricas (desequilibradas). Método de Aron. Con dos wattímetros.
Línea Carga De aplicación general y — ~ para redes con neutro y sin
U neutro.
Potencia total P = P. + P-2
lr Corriente de fase U, Tensión de fase / Corriente de línea U Tensión entre líneas R, S, T Conductores principales de línea (o bien: L,,L2-L,) N Hilo de neutro (o punto común) P, Potencia de fase (activa)
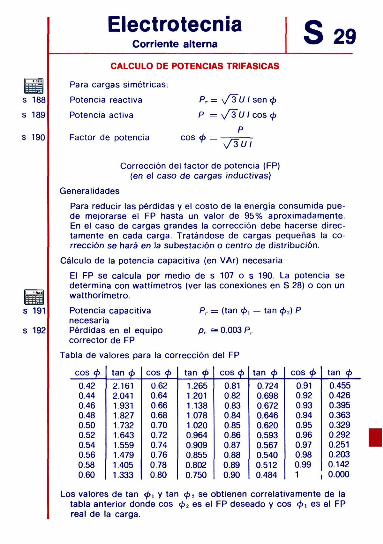
Electrotecnia Corriente alterna
CALCULO DE POTENCIAS TRIFÁSICAS
Para cargas simétricas Potencia reactiva Potencia activa
Factor de potencia
Corrección del factor de potencia (FP) (en el caso de cargas inductivas)
Generalidades Para reducir las pérdidas y el costo de la energía consumida puede mejorarse el FP hasta un valor de 95% aproximadamente. En el caso de cargas grandes la corrección debe hacerse directamente en cada carga. Tratándose de cargas pequeñas la corrección se hará en la subestación o centro de distribución.
Cálculo de la potencia capacitiva (en VAr) necesaria El FP se calcula por medio de s 107 o s 190. La potencia se determina con wattimetros (ver las conexiones en S 28) o con un watthorímetro. Potencia capacitiva P, = (tan <pt — tan (f>~) P necesaria Pérdidas en el equipo pc s» 0.003 P, corrector de FP
Tabla de valores para la corrección del FP
eos 9
0.42 0.44 0.46 0.48 0.50 0.52 0.54 0.56 0.58 0.60
tan 9 2.161 2.041 1.931 1.827 1 732 1.643 1.559 1.479 1.405 1 333
eos 9
0.62 0.64 0.66 0.68 0.70 0.72 0.74 0.76 0.78 0 8 0
tan 9
1.265 1.201 1.138 1.078 1.020 0.964 0.909 0.855 0.802 0 750
eos 9
0.81 082 0.83 084 085 086 0.87 0.88 0.89 0.90
tan 9
0.724 0.698 0.672 0.646 0.620 0593 0.567 0.540 0.512 0.484
eos 9
0.91 0.92 0.93 0.94 0.95 0.96 0.97 0.98 0.99 1
tan 9
0.455 0.426 0.395 0.363 0.329 0.292 0.251 0.203 0.142 0.000
Los valores de tan <p, y tan <f>2 se obtienen correlativamente de la tabla anterior donde eos <p2 es el FP deseado y eos 91 es el FP real de la carga.
S 29
P, = yfJu I sen 9 P = \fzu I eos 9
P eos 9 = — =
\Í3UI
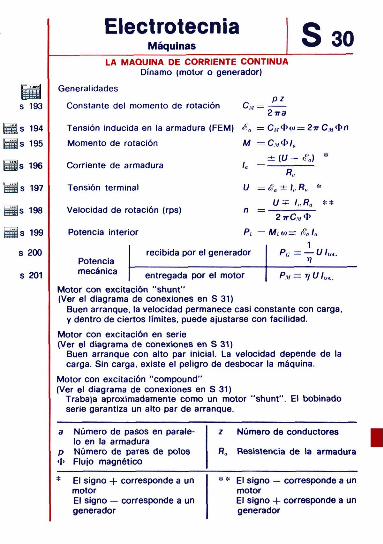
Electrotecnia Máquinas S 30
LA MAQUINA DE CORRIENTE CONTINUA Dinamo (motor o generador)
Generalidades
Constante del momento de rotación
Tensión inducida en la armadura (FEM) Momento de rotación
Corriente de armadura
Tensión terminal
Velocidad de rotación (rps)
Potencia interior
C\¡ -
<?. ■-
M :
2 ira
-. CM'1>O>= 2 i rC ; ,* f i
CM<I»/„
=fc (U - <?„) *
--<ga±l„Ra *
U =P I a fía * *
P¡
Potencia mecánica
recibida por el generador
2 7rCM't>
MiO>= <?„/„
1 Pe : -Ulí0
VU'u, entregada por el motor Motor con excitación "shunt" (Ver el diagrama de conexiones en S 31)
Buen arranque, la velocidad permanece casi constante con carga, y dentro de ciertos límites, puede ajustarse con facilidad.
Motor con excitación en serie (Ver el diagrama de conexiones en S 31)
Buen arranque con alto par inicial. La velocidad depende de la carga. Sin carga, existe el peligro de desbocar la máquina.
Motor con excitación "compound" (Ver el diagrama de conexiones en S 31)
Trabaja aproximadamente como un motor "shunt". El bobinado serie garantiza un alto par de arranque.
a Número de pasos en paralelo en la armadura
p Número de pares de polos <l> Flujo magnético
z Número de conductores
fl„ Resistencia de la armadura
El signo + corresponde a un motor El signo — corresponde a un generador
* * El signo — corresponde a un motor El signo 4- corresponde a un generador
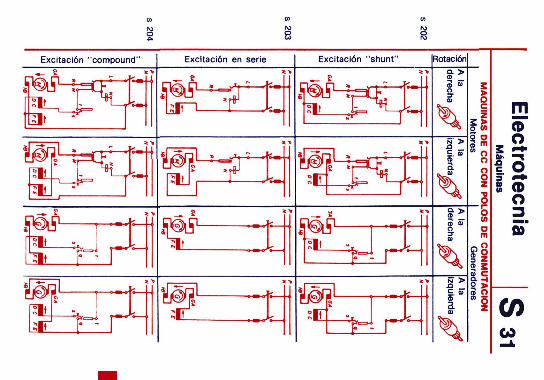
Excitación "compound"
; | t H r*
Excitación en serie
^ü piJ
«SaL X
Excitación "shunt" Rotación
sr
M - í -
j _ t -
fcLr*1
Q. >
I "
s- > 5 u
5'
a
2 > O c z s > O 0) g o 3 m " o o
o o z
o (A O
m
fi s >
m (D
o s - * € O
0)
CAÍ
Electrotecnia Máquinas S 32
MOTORES DE CA TRIFÁSICOS
Velocidad de sincronismo Según el número p de pares de polos y la frecuencia r (en Hz), se tiene
f 60/ Velocidad de sincronismo n, = — = (en rpm)
P P Conexión
Si todas las terminales del devanado del estator se llevan al tablero de conexiones, entonces el motor puede conectarse en delta o en estrella.
Tensión por fase en estrella en delta
U
Un motor con la designación 660/380 V opera con sus valores nominales de corriente, par y potencia conectado a una tensión
U = 380 V en A; entonces UF = 380 V U 660
U = 660 V en Y; entonces Ur = —,= = — = = 380 V
Conexión delta-estrella Los motores de altas potencias operan generalmente en delta. Para evitar corrientes excesivas de arranque, en redes de baja potencia se les arranca conectados en estrella, y posteriormente se operan en delta. Si, por ejemplo, un motor con tensión nominal de 660/380 V se arranca en estrella conectado a una red de 380/ 220 V, entonces se le aplica por fase 1/\/3~de su tensión nominal.
Motor asincrono (o de inducción) En el devanado del rotor se inducen tensiones y corrientes por el campo magnético giratorio producido por la corriente en el estator, por lo cual se le denomina también motor de inducción. La velocidad de operación es aproximadamente de 3% a 5% (deslizamiento) menor que la del campo giratorio (velocidad de sincronismo). Con carga su velocidad permanece constante.
Motor síncrono Requiere corriente continua para su excitación. Se arranca con ayuda de su devanado amortiguador (de ¡aula) hasta alcanzar la velocidad de sincronismo. Puede funcionar también reversiblemente como generador síncrono o alternador.
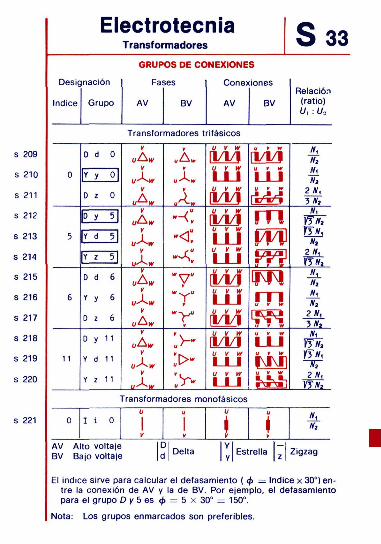
Electrotecnia Transformadores S 33
GRUPOS DE CONEXIONES
Designación
índice Grupo
Fases
AV BV
Conexiones
BV Relación
(ratio) U, : Ua
Transformadores trifásicos
0
5
6
11
D d 0
|Y y 0 |
D z 0
|D y 51
|Y d 5 |
| Y z 5 |
D d 6
Y y 6
D z 6
D y 11
Y d 11
Y z 11
V
V
* V
V
¥
V
y
y
y
y
V
V
i r*"»!» V
*< "<3°
Y Y
ty v w
[1/1/1 L U [1/1/1
v r if
LU 1/ K W
L U [1/1/1 L U ü P W
H/l/l [1/1/1 1 1 1
1 1 1
li/i/i U 1 W
L U Ü V W
II!
w 1 1 1
u ir w
1 1 1 u v w
A 2/V, 3 # j 2¡
FT¡v7 rT<r, 2 * 1
¡¡i * J
2/Y, 3 * i
rf/¡¡ ir*, 2/V,
0 I i
Transformadores monofásicos u
0
V
y
l ir
u
i V
ü
i AV Alto voltaje BV Bajo voltaje Delta Estrella Zigzag
El Índice sirve para calcular el defasamiento ( di = índice x 30°) entre la conexión de AV y la de BV. Por ejemplo, el defasamiento para el grupo D y 5 es <j> = 5 x 30° = 150°.
Nota: Los grupos enmarcados son preferibles.
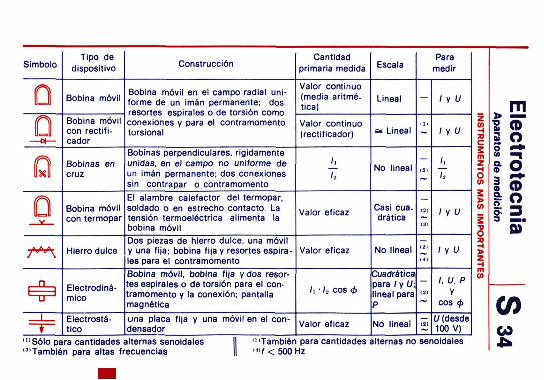
Símbolo
0 0. 0 0. * A A
n
U
1 t
Tipo de dispositivo
Bobina móvil
Bobina móvil con rectificador
Bobinas en cruz
Bobina móvil con termopar
Hierro dulce
Electrodinámico
Electrostático
Construcción
Bobina móvil en el campo radial uniforme de un imán permanente; dos resortes espirales o de torsión como conexiones y para el contramomento torsional
Bobinas perpendiculares, rígidamente unidas, en el campo no uniforme de un imán permanente; dos conexiones sin contrapar o contramomento El alambre calefactor del termopar, soldado o en estrecho contacto. La tensión termoeléctrica alimenta la bobina móvil Dos piezas de hierro dulce, una móvil y una fija; bobina fija y resortes espirales para el contramomento Bobina móvil, bobina fija y dos resortes espirales o de torsión para el contramomento y la conexión; pantalla magnética una placa fija y una móvil en el condensador
Cantidad primaria medida
Valor continuo (media aritmética)
Valor continuo (rectificador)
Valor eficaz
Valor eficaz
/, • 1-2 eos <£
Valor eficaz
Escala
Lineal
SÍ Lineal
No lineal
Casi cuadrática
No lineal
Cuadrática para 1 y U; lineal para P
No lineal
-
'11
IS)
(2)
(SI
<2>
141
12)
[21
Para medir
/ y U
1 y U
1, T,
1 y U
1 y U
/, U. P y
eos tf> U (desde 100 V)
'"Sólo para cantidades alternas senoidales -También para cantidades alternas no senoidales '"'También para altas frecuencias || , 47<500Hz
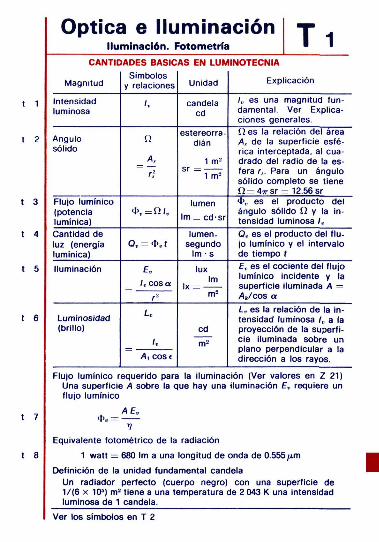
Óptica e Iluminación Iluminación. Fotometría Ti
CANTIDADES BÁSICAS EN LUMINOTECNIA
Magnitud
Intensidad luminosa
Ángulo sólido
Flujo lumínico (potencia lumínica) Cantidad de luz (energía lumínica)
I luminación
Luminosidad (brillo)
Símbolos y relaciones
',
íl
A,
<I>„ = S2/„
O , = <l>„t
/„ eos a
r2
A, eos e
Unidad
candela cd
estereorra-dián
1 m-sr =
1 m2
lumen
Im = cd'Sr
lumen-segundo
Im • s
lux Im
lx = m2
cd
" m 2 "
Explicación
/„ es una magnitud fundamental. Ver Explicaciones generales. U e s la relación del área A, de la superficie esférica interceptada, al cuadrado del radio de la esfera r„. Para un ángulo sólido completo se tiene S2=47rsr = 12.56 Sr <l\, es el producto del ángulo sólido U y la intensidad luminosa /„ O,, es el producto del f lujo lumínico y el intervalo de t iempo t E„ es el cociente del f lujo lumínico incidente y la superficie iluminada A = Ak/cos a
L, es la relación de la intensidad luminosa f„ a la proyección de la superf icie iluminada sobre un plano perpendicular a la dirección a los rayos.
Flujo lumínico requerido para la iluminación (Ver valores en 2 21) Una superficie A sobre la que hay una iluminación £„ requiere un flujo lumínico
<l>„ = -AE„
Equivalente fotométrico de la radiación
1 watt = 680 Im a una longitud de onda de 0.555 ¿im
Definición de la unidad fundamental candela Un radiador perfecto (cuerpo negro) con una superficie de 1/(6 x 10") m2 tiene a una temperatura de 2 043 K una intensidad luminosa de 1 candela.
Ver los símbolos en T 2
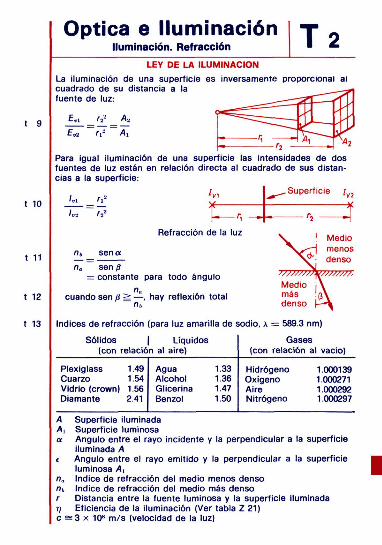
Óptica e Iluminación I T ~ Iluminación. Refracción »
LEY DE LA ILUMINACIÓN La iluminación de una superficie es inversamente proporcional ai cuadrado de su distancia a la fuente de luz:
ti "A,
Para igual iluminación de una superficie las intensidades de dos fuentes de luz están en relación directa al cuadrado de sus distancias a la superficie:
I.: r-S
Ivi
Lr,_ ^ ^ Superficie ¡n
Refracción de la luz
sen/3 : constante para todo ángulo
cuando sen /3 g —, hay reflexión total denso
índices de refracción (para luz amarilla de sodio, x — 589.3 nm)
Sólidos | Líquidos (con relación al aire)
Gases (con relación al vacio)
Plexiglass 1.49 Cuarzo 1.54 Vidrio (crown) 1.56 Diamante 2.41
Agua Alcohol Glicerina Benzol
1.33 1.36 1.47 1.50
Hidrógeno Oxígeno Aire Nitrógeno
1.000139 1.000271 1.000292 1.000297
A Superficie iluminada A, Superficie luminosa a Ángulo entre el rayo incidente y la perpendicular a la superficie
iluminada A t Ángulo entre el rayo emitido y la perpendicular a la superficie
luminosa A, n„ índice de refracción del medio menos denso n,, índice de refracción del medio más denso r Distancia entre la fuente luminosa y la superficie iluminada JJ Eficiencia de la iluminación (Ver tabla Z 21) c s ; 3 x 10" m/s (velocidad de la luz)
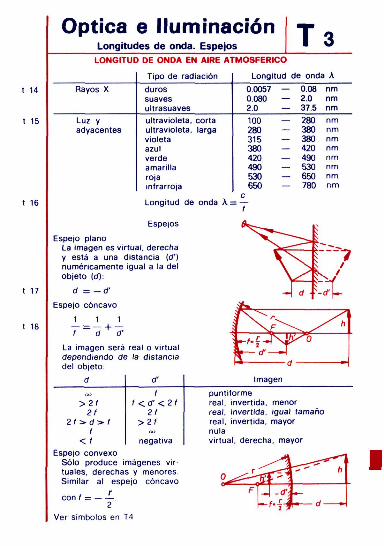
Óptica e Iluminación Longitudes de onda. Espejos T3
LONGITUD DE ONDA EN AIRE ATMOSFÉRICO
Rayos X
Luz y adyacentes
Tipo de radiación duros suaves ultrasuaves ultravioleta, corta ultravioleta, larga violeta azul verde amarilla roja infrarroia
Longitud
0.0057 0.080 2.0 100 280 315 380 420 490 530 650
— — — — — — — — — — —
Je onda A
0.08 nm 2.0 nm 37.5 nm 280 nm 380 nm 380 nm 420 nm 490 nm 530 nm 650 nm 780 nm
Longitud de onda k = -
Espejos
Espejo plano La imagen es virtual, derecha y está a una distancia id') numéricamente igual a la del objeto id):
d = - d '
Espejo cóncavo
1 1 1
T~~d <f La imagen será real o virtual dependiendo de la distancia del objeto:
d
>2I 2t
2f>d>t 1
< r
d'
1 t < d' < 2 1
21 >2I
negativa
Imagen
puntiforme real, invertida, menor real, invertida, igual tamaño real, invertida, mayor nula virtual, derecha, mayor
Espeio convexo Sólo produce imágenes virtuales. derechas y menores. Similar al espejo cóncavo
con / = . 2
Ver símbolos en T4
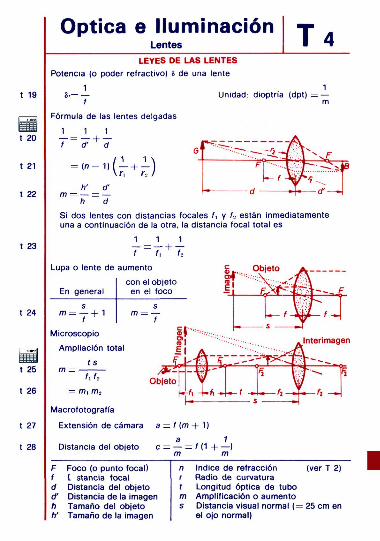
Óptica e Iluminación Lentes T4
LEYES DE LAS LENTES Potencia (o poder refractivo) 6 de una lente
1 1
I
Fórmula de las lentes delgadas
1 _ 1 1
T~d7 + 7'
Unidad: dioptría (dpt) = —
(¿♦¿) = ( n - 1 )
h' o" m = — = —
h d
Si dos lentes con distancias focales f, y l2 están inmediatamente una a continuación de la otra, la distancia focal total es
1 T
Lupa o lente de aumento
En general
1 1
m = — 1 - 1 I
Microscopio
Ampliación total
í s
Macrofotografía
Extensión de cámara a = f (m + 1)
Distancia del objeto : — = MI + —) F 1 d tf h h'
Foco (o punto focal) [ stancia focal Distancia del objeto Distancia de la imagen Tamaño del objeto Tamaño de la imagen
n índice de refracción r Radio de curvatura t Longitud óptica de tubo m Amplificación o aumento s Distancia visual normal (=
el ojo normal)
(ver T 2)
25 cm en
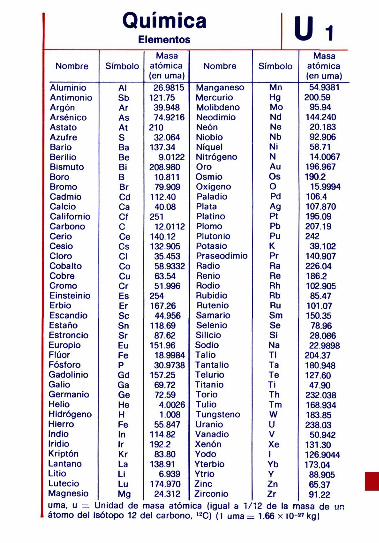
Nombre
Aluminio Ant imonio Argón Arsénico Astato Azufre Bario Berilio Bismuto Boro Bromo Cadmio Calcio Californio Carbono Cerio Cesio Cloro Cobalto Cobre Cromo Einsteinio Erbio Escandio Estaño Estroncio Europio Flúor Fósforo Gadolinio Galio Germanlo Helio Hidrógeno Hierro Indio Iridio Kriptón Lantano Lit io Lutecio Magnesio
Química Elementos
Símbolo
Al Sb Ar As At S Ba Be Bi B Br Cd Ca Cf C Ce Cs Cl Co Cu Cr Es Er Se Sn Sr Eu Fe P Gd Ga Ge He H Fe In Ir Kr La Li Lu Mg
Masa atómica (en urna)
26.9815 121.75 39.948 74.9216
210 32.064
137.34 9.0122
208.980 10.811 79.909
112.40 40.08
251 12.0112
140.12 132.905 35.453 58.9332 63.54 51.996
254 167.26 44.956
118.69 87.62
151.96 18.9984 30.9738
157.25 69.72 72.59
4.0026 1.008
55.847 114.82 192.2 83.80
138.91 6.939
174.970 24.312
Nombre
Manganeso Mercur io Molibdeno Neodimio Neón Niobio Níquel Nitrógeno Oro Osmio Oxígeno Paladio Plata Platino Plomo Plutonio Potasio Praseodimio Radio Renio Rodio Rubidio Ruten io Samario Selenio Sil icio Sodio Talio Tantalio Telurio Titanio Torio Tulio Tungsteno Uranio Vanadio Xenón Yodo Yterbio Ytrio Zinc Zirconio
I 1 H. \ S 1
Símbolo
Mn Hg Mo Nd Ne Nb Ni N Au Os O Pd Ag Pt Pb Pu K Pr Ra Re Rh Rb Ru Sm Se Si Na TI Ta Te TI Th Tm W U V Xe I Yb Y Zn Zr
Masa atómica (en urna) 54.9381
200.59 95.94
144.240 20.183 92.906 58.71 14.0067
196.967 190.2
15.9994 106.4 107.870 195.09 207.19 242
39.102 140.907 226.04 186.2 102.905 85.47
101.07 150.35
78.96 28.086 22.9898
204.37 180.948 127.60 47.90
232.038 168.934 183.85 238.03
50.942 131.30 126.9044 173.04
88.905 65.37 91.22
urna, u = Unidad de masa atómica (igual a 1/12 de la masa de un átomo del isótopo 12 del carbono. 12C) (1 uma= 1.66 x i0-2 'kg)
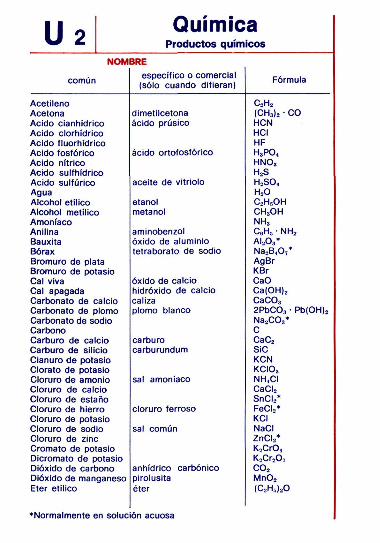
Ü2 Química Productos químicos
NOMBRE
común
Acetileno Acetona Acido cianhídrico Acido clorhídrico Acido fluorhídrico Acido fosfórico Acido nítrico Acido sulfhídrico Acido sulfúrico Agua Alcohol etílico Alcohol metílico Amoníaco Anilina Bauxlta Bórax Bromuro de plata Bromuro de potasio Cal viva Cal apagada Carbonato de calcio Carbonato de plomo Carbonato de sodio Carbono Carburo de calcio Carburo de silicio Cianuro de potasio Clorato de potasio Cloruro de amonio Cloruro de calcio Cloruro de estaño Cloruro de hierro Cloruro de potasio Cloruro de sodio Cloruro de zinc Cromato de potasio Dicromato de potasio Dióxido de carbono Dióxido de manganeso Éter etílico
♦Normalmente en soluc
específico o comercial (sólo cuando difieran)
dimetilcetona ácido prúsico
ácido ortofosfórico
aceite de vitriolo
etanol metanol
aminobenzol óxido de aluminio tetraborato de sodio
óxido de calcio hidróxldo de calcio caliza plomo blanco
carburo carburundum
sal amoníaco
cloruro ferroso
sal común
anhídríco carbónico pirolusita éter
ón acuosa
Fórmula
C2H2 (CH3)2 • CO HCN HCI HF H3PO, HN03 H2S H2SO, H20 C2H5OH CH3OH NH3 C„H5 ■ NH2 AI2Oa* Na2B40?* AgBr KBr CaO Ca(OH)2 CaCOj 2PbC03 • Pb(OH)2 Na2C03* C CaC2 SIC KCN KCI03 NH4CI CaCI2 SnCI.* FeCI,* KCI NaCI ZnCI2* K2CrO, K.Cr.O, co2 Mn02 (C2H.,)20
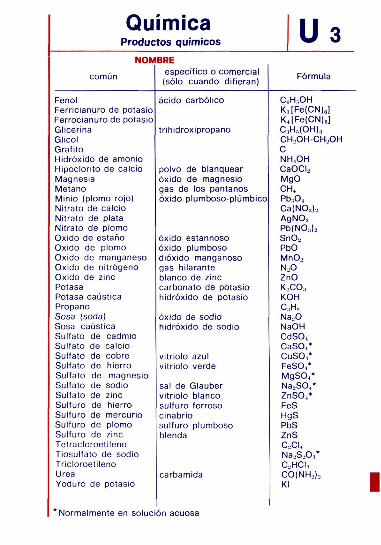
Química Productos químicos
NOMBRE
común
Fenol Ferricianuro de potasio Ferrocianuro de potasio Glicerina Glicol Grafito Hidróxido de amonio Hipoclorito de calcio Magnesia Metano Minio (plomo rojo) Nitrato de calcio Nitrato de plata Nitrato de plomo Oxido de estaño Oxido de plomo Oxido de manganeso Oxido de nitrógeno Oxido de zinc Potasa Potasa caustica Propano Sosa (soda) Sosa caustica Sulfato de cadmio Sulfato de calcio Sulfato de cobre Sulfato de hierro Sulfato de magnesio Sulfato de sodio Sulfato de zinc Sulfuro de hierro Sulfuro de mercurio Sulfuro de plomo Sulfuro de zinc Tetracloroeti leno Tiosulfato de sodio Tricloroeti leno Urea Yoduro de potasio
específico o comercial (sólo cuando difieran)
ácido carbólico
tr ihidroxipropano
polvo de blanquear óxido de magnesio gas de los pantanos óxido plumboso-plumbico
óxido estannoso óxido plumboso dióxido manganoso gas hilarante blanco de zinc carbonato de potasio hidróxido de potasio
óxido de sodio hidróxido de sodio
vitr iolo azul vitr iolo verde
sal de Glauber vitr iolo blanco sulfuro ferroso cinabrio sulfuro plumboso blenda
carbamida
Fórmula
C,;H,OH K:,[Fe(CN)„l K4 [Fe(CN)„] C:,H,(OH), CH.,OH-CH,,OH C NH.OH CaOCI2
MgO CH4
Pb,0 4
Ca(NO:1)2
A g N 0 3
Pb(N03)¡. S n 0 2
PbO MnOL. N20 ZnO K..CO., KOH C3H» Na.O NaOH CdSO, CaSO,* CuSO,* FeSO,* MgSO,* Na2SO,* ZnSO,* FeS HgS PbS ZnS C C I , Na.S.O;,* C.HCI:, CO(NH2), Kl
* Normalmente en solución acuosa
U3

U4 Química Valores pH. Indicadores
VALOR pH
El logaritmo decimal con signo negativo de la concentración de iones hidrógeno ca* es el valor pH de una sustancia:
c„+
PH
1
0
pH = -
10-1
1
10"2
2
logio CH*
10-'
7
neutra
10-12
12
• alcal
101S
13
10-"
14
Indicadores ácido-base
Indicador
Azul de timol 4-dimetilaminoazobenzol Azul de bromofenol Rojo congo Anaranjado de metilo Verde de bromocreosol Rojo de metilo Tornasol Púrpura de bromocreosol Rojo de bromofenol
Azul de bromotimol Rojo de fenol Rojo neutro Rojo de creosol m-creosolpúrpura
Azul de timol Fenolftaleína Amarillo de alizarina GG
Intervalo delpH
1.2-2.8 2.9 - 4.0 3.0 - 4.6 3.0 - 5.2 3.1 - 4.4 3.8 - 5.4 4.4 - 6.2 5.0 - 8.0 5.2 - 6.8 5.2 - 6.8
6.0 - 7.6 6.4 - 8.2 6.4 - 8.0 7.0 - 8.8 7.4 - 9.0
8.0 - 9.6 8.2 - 9.8
10.0-12.1
Cambio de color
rojo - amarillo rojo - amarillo naranja amarillo - rojo violeta azul violeta - rojo naranja rojo - amarillo naranja amarillo - azul rojo - amarillo anaranjado rojo - azul amarillo - púrpura anaranjado amarillo - púrpura
amarillo - azul amarillo - rojo azul rojizo - anaranjado amarillo amarillo - púrpura amarillo - púrpura
amarillo - azul sin color - rojo violeta amarillo claro - castaño amarillento
u 1
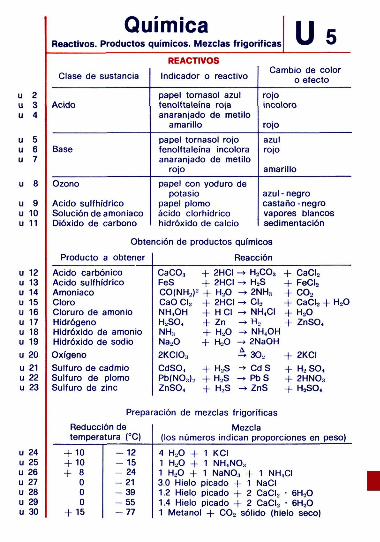
Química Reactivos. Productos químicos. Mezclas frigoríficas Us
Clase de sustancia
Acido
Base
Ozono
Acido sulfhídrico Solución de amoniaco Dióxido de carbono
REACTIVOS Indicador o reactivo
papel tornasol azul fenolftaleína roja anaranjado de metilo
amarillo papel tornasol rojo fenolftaleína incolora anaranjado de metilo
rojo papel con yoduro de
potasio papel plomo ácido clorhídrico hidróxido de calcio
Cambio de color o efecto
rojo incoloro
rojo azul rojo
amarillo
azul - negro castaño-negro vapores blancos sedimentación
Obtención de productos químicos
Producto a obtener Acido carbónico Acido sulfhídrico Amoniaco Cloro Cloruro de amonio Hidrógeno Hidróxido de amonio Hidróxido de sodio Oxígeno Sulfuro de cadmio Sulfuro de plomo Sulfuro de zinc
CaCO-, FeS CO(NH,,) CaO Cl2 NH,OH H2SO, NH, Na,0 2KCI0., 0dSO4 Pb(N03).. ZnSO<
Reacción + 2HCI -» H2C03 + 2HCI -> H2S
' + H20 -> 2NH:1 + 2HCI -» Cl3 + H Cl -> NH,CI + Zn -> H.. + H,0 -» NH,OH + K.O -» 2NaOH
4 30= + H2S -» Cd S + H-S -^ Pb S + H2S -» ZnS
+ CaCI2 + FeCI2 + CO, + CaCI2 + H20 + H20 + ZnSO,
+ 2KCI + H2SO, + 2HNO., + H2SO,
Preparación de mezclas frigoríficas Reducción de temperatura (°C)
Mezcla (los números indican proporciones en peso)
+ 10 + 10 + 8
0 0 0
+ 15
-12 - 15
24 21 39
-55 77
4 H20 + 1 KCI 1 H20 + 1 NH.NO., 1 H,,0 + 1 NaNO,, + 1 NH^CI 3.0 Hielo picado + 1 NaCI 1.2 Hielo picado + 2 CaCI., • 6H20 1.4 Hielo picado + 2 CaCI2 • 6H20 1 Metanol + C02 sólido (hielo seco)
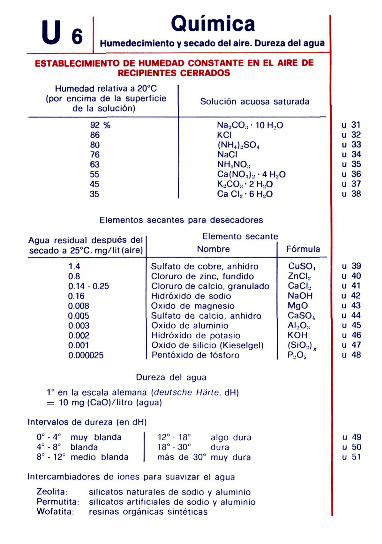
Ue Química Humedeclmiento y secado del aire. Dureza del agua
ESTABLECIMIENTO DE HUMEDAD CONSTANTE EN EL AIRE DE RECIPIENTES CERRADOS
Humedad relativa a 20°C (por encima de la superficie
de la solución)
92 % 86 80 76 63 55 45 35
Solución acuosa saturada
Na.CO;,- 10H.O KCI (NH.I-.SO* NaCI NH4NO :, Ca(NO:,).. • 4 H.O I C . C C V 2 H O Ca Cl¡¡ ■ 6 H.O
Elementos secantes para desecadores
Agua residual después del secado a 25°C
1.4 0.8 0.14-0.16 0.008 0.005 0.003 0.002 0.001
mg/ l i t (a i re)
0.25
0.000025
Elemento secante Nombre
Sulfato de cobre, anhidro Cloruro de zinc, fundido Cloruro de calcio, granulado Hidróxido de sodio Oxido de magnesio Sulfato de calcio, anhidro Oxido de aluminio Hidróxido de potasio Oxido de silicio (Kieselgel) Pentóxido de fósforo
Fórmula
CuSO, ZnCI.. CaCI. NaOH MgO CaS0 4 AI..O, KOH (SiO,) , P,.O,
Dureza del agua
1 o en la escala alemana (deutsche Harte. dH) = 10 mg (CaO|/ l i t ro (agua)
Intervalos de dureza (en dH)
0° - 4° muy blanda 4° - 8° blanda 8° -12° medio blanda
12° - 18° algo dura 18°-30° dura más de 30° muy dura
Intercambiadores de iones para suavizar el agua
Zeolita: sil icatos naturales de sodio y aluminio Permutita: sil icatos artif iciales de sodio y aluminio Wofatita: resinas orgánicas sintéticas
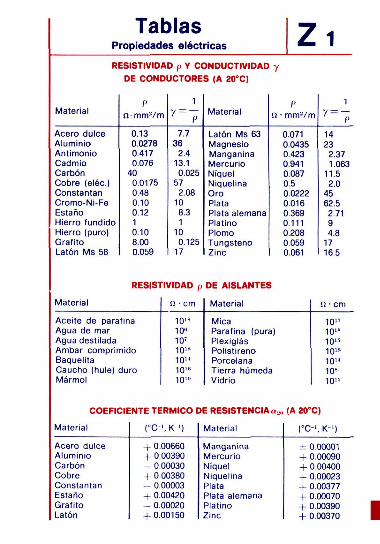
Tablas Propiedades eléctricas
RESISTIVIDAD p Y CONDUCTIVIDAD y DE CONDUCTORES (A 20°C)
Material
Acero dulce Aluminio Antimonio Cadmio Carbón Cobre (eléc.) Constantan Cromo-Ni-Fe Estaño Hierro fundido Hierro (puro) Grafito Latón Ms 58
P fi-mmVm
0.13 0.0278 0.417 0.076
40 0.0175 0.48 0.10 0.12 1 0.10 8.00 0.059
1 7 = 7
7.7 36
2.4 13.1 0.025
57 2.08
10 8.3 1
10 0.125
17
Material
Latón Ms 63 Magnesio Manganlna Mercurio Níquel Niquelina Oro Plata Plata alemana Platino Plomo Tungsteno Zinc
P n ■ m m V m
0.071 0.0435 0.423 0.941 0.087 0.5 0.0222 0.016 0.369 0.111 0.208 0.059 0.061
1
14 23
2.37 1.063
11.5 2.0
45 62.5 2.71 9 4.8
17 16.5
RESISTIVIDAD p DE AISLANTES
Material
Aceite de parafina Agua de mar Agua destilada Ámbar comprimido Baquelita Caucho (hule) duro Mármol
ü ■ cm
1 0 " 10" 107
1 0 " 1 0 " 1 0 " 10'"
Material
Mica Parafina (pura) Plexiglás Polistireno Porcelana Tierra húmeda Vidrio
n ■ cm
1 0 " 1 0 " 10 1 5
1 0 " 1 0 " 10" 10 1 S
COEFICIENTE TÉRMICO DE RESISTENCIA o,,. (A 20°C)
Material
Acero dulce Aluminio Carbón Cobre Constantan Estaño Grafito Latón
C C ' . K ')
+ 0.00660 + 0.00390 - 0.00030 + 0.00380 - 0.00003 + 0.00420 - 0.00020
+ 0.00150
Material
Manganina Mercurio Níquel Niquelina Plata Plata alemana Platino Zinc
rc->.K>)
± 0.00001 + 0.00090 + 0.00400 + 0.00023 + 0.00377 + 0.00070 + 0.00390 + 0.00370
Zi
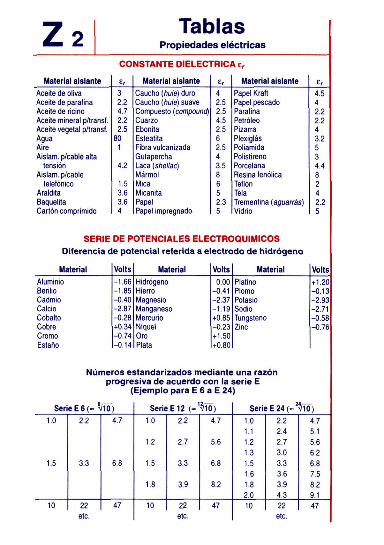
7 ¿_ ¿
Tablas Propiedades eléctr icas
CONSTANTE DIELÉCTRICA t,
Material aislante
Aceite de oliva Aceite de paraíina Aceite de ricino Aceite minera! p/transf. Aceite vegetal p/transt. Agua Aire Aislam. p/cable alta
tensión Aisiam. p/cable
telefónico Araldita Baquelita
e, 3 2.2 4.7 2.2 2.5
80 1
4.2
1.5 3.6 3.6
Material aislante
Caucho (hule) duro Caucho (hule) suave Compuesto (compound} Cuarzo Ebonita Esteatita Fibra vulcanizada Gutapercha Laca {shellac) Mármol Mica Micanita Papel
E' 4 2.5 2.5 4.5 2.5 6 2.5 4 3.5 8 6 5 2.3
Material aislante
Papel Kraft Papel pescado Paraíina Petróleo Pizarra Plexiglás Poliamida Polistireno Porcelana Resina lenólica Teflón Tela Trementina (aguarrás)
£,
4.5 4 2.2 2.2 4 3.2 5 3 4.4 8 2 4 2.2
Cartón comprimido 4 Papel impregnado. 5 Vidrio 5
SERIE DE POTENCIALES ELECTROQUÍMICOS
Diferencia de potencial referida a electrodo de hidrógeno
Material
Aluminio Berilio Cadmio Calcio Cobalto Cobre Cromo Estaño
Volts
-1.66 -1.85 -0.40 -2.87 -0.28 +0.34 -0.74 -0.14
Material
Hidrógeno Hierro Magnesio Manganeso Mercurio Níquel Oro Plata
Volts
0.00 -0.41 -2.37 -1.19 +0.85 -0.23 +1.50 +0.80
Material
Platino Plomo Potasio Sodio Tungsteno Zinc
Volts
+1.20 -0.13 -2.93 -2.71 -0.58 -0.76
Números estandarizados mediante una razón progresiva de acuerdo con la serie E
(Ejemplo para E 6 a E 24)
Serle E 6 (- 6VÍ0)
1.0
1.5
10
2.2
3.3
22 etc.
4.7
6.8
47
Serie E 12 (= ' \ ÍT0)
1.0
1.2
1.5
1.8
10
2.2
2.7
3.3
3.9
22 etc.
4.7
5.6
6.8
8.2
47
Serie E 24 (= 2\Í10)
1.0 1.1 1.2 1.3 1.5 1.6 1.8 2.0 10
2.2 2.4 2.7 3.0 3.3 3.6 3.9 4.3 22 etc.
4.7 5.1 5.6 6.2 6.8 7.5 8.2 9.1 47
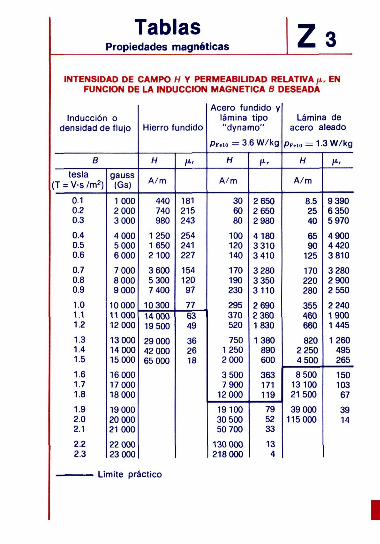
Tablas Propiedades magnéticas
INTENSIDAD DE CAMPO H Y PERMEABILIDAD RELATIVA ¡i, EN FUNCIÓN DE LA INDUCCIÓN MAGNÉTICA B DESEADA
Inducción o densidad de flujo
B
tesla T = Vs /m2)
0.1 0.2 0.3
0.4 0.5 0.6
0.7 0.8 0.9
1.0 1.1 1.2
1.3 1.4 1.5
1.6 1.7 1.8
1.9 2.0 2.1
2.2 2.3
gauss (Gs)
1000 2 000 3 000
4 000 5 000 6 000
7 000 8 000 9 000
10 000 11 000 12 000
13 000 14000 15 000
16 000 17 000 18 000
19 000 20 000 21000
22 000 23 000
Hierro fundido
H
A / m
440 740 980
1 250 1 650 2 100
3 600 5 300 7 400
10300 14000 19 500
29 000 42 000 65 000
/ ¿ ,
181 215 243
254 241 227
154 120 97
77 63 49
36 26 18
Acero fundido y lámina t ipo "dynamo"
pF«u, = 3.6 W / k g
H
A / m
30 60 80
100 120 140
170 190 230
295 370 520
750 1250 2000
3 500 7 900
12 000
19 100 30 500 50 700
130 000 218000
f r
2 650 2 650 2 980
4180 3310 3 410
3 280 3 350 3110
2 690 2 360 1830
1 380 890 600
363 171 119
79 52 33
13 4
Lámina de acero aleado
pP.,„ = 1.3 W / k g
H
A / m
8.5 25 40
65 90
125
170 220 280
355 460 660
820 2 250 4 500
8 500 13 100 21 500
39 000 115000
H-r
9 390 6350 5 970
4 900 4 420 3 810
3 280 2 900 2 550
2 240 1900 1 445
1260 495 265
150 103 67
39 14
Límite práctico
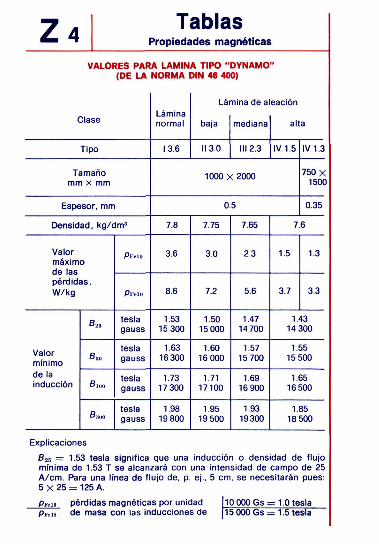
Z4 Tablas Propiedades magnéticas
VALORES PARA LAMINA TIPO "DYNAMO" (DE LA NORMA DIN 46 400)
Clase
Tipo
Tamaño mm x mm
Espesor, mm
Densidad, kg /dm 3
Valor máximo
pérdidas, W / k g
Valor mínimo de la inducción
B25
Bno
Sioo
O300
Pp.10
Pr,u
tesla gauss
tesla gauss
tesla gauss
tesla gauss
Lámina normal
13.6
Lá
baja
II 3.0
nina de aleación
mediana alta
III 2.3 IV 1.5
1000 X 2000
0.5
7.8
3.6
8.6
1.53 15 300
1.63 16 300
1.73 17 300
1.98 19 800
7.75
3.0
7.2
1.50 15 000
1.60 16 000
1.71 17100
1.95 19 500
7.65
2.3
5.6
1.47 14 700
1.57 15 700
1.69 16 900
1.93 19300
IV 1.3
750 X 1500
0.35
7.6
1.5
3.7
1.3
3.3
1.43 14 300
1.55 15 500
1.65 16 500
1.85 18 500
Explicaciones B25 = 1.53 tesla significa que una inducción o densidad de flujo mínima de 1.53 T se alcanzará con una intensidad de campo de 25 A/cm. Para una línea de flujo de. p. ej.. 5 cm, se necesitarán pues: 5 X 2 5 = 125 A.
PFclH PFel i
pérdidas magnéticas por unidad de masa con las inducciones de
IIO 000 Gs = 1.0 tesla |15 000Gs = 1.5 tesla
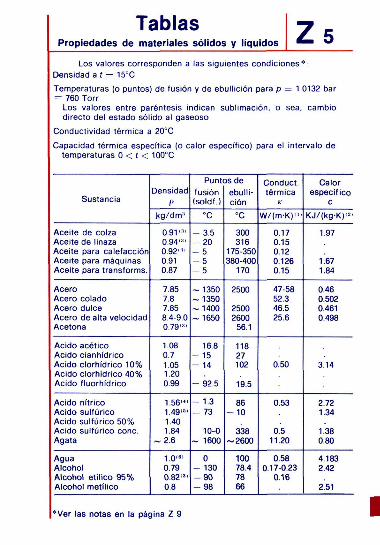
Tablas Propiedades de materiales sólidos y líquidos á ís
Los valores corresponden a las siguientes condiciones*: Densidad a t = 15°C
Temperaturas (o puntos) de fusión y de ebullición para p = 1.0132 bar = 760 Torr
Los valores entre paréntesis indican sublimación, o sea, directo del estado sólido al gaseoso
Conductividad térmica a 20°C
Capacidad térmica específica (o calor específico) temperaturas 0 < í < 100°C
Sustancia
Aceite de colza Aceite de linaza Aceite para calefacción Aceite para máquinas Aceite para transforms.
Acero Acero colado Acero dulce Acero de alta velocidad Acetona
Acido acético Acido cianhídrico Acido clorhídrico 10% Acido clorhídrico 40% Acido fluorhídrico
Acido nítrico Acido sulfúrico Acido sulfúrico 50% Acido sulfúrico conc. Ágata
Agua Alcohol Alcohol etílico 95% Alcohol metílico
Densidad P
k g / d m '
0.91<" 0.94':<> 0.92'" 0.91 0.87
7.85 7.8 7.85 8.4-9.0 0.79'»'
1.08 0.7 1.05 1.20 0.99
1.5614' 1.49'5' 1.40 1.84
- 2 . 6
1.0"" 079 0.82'3' 0.8
Puntos de fusión (soldf.)
°C
- 3 . 5 - 20 - 5 - 5 - 5
- 1 3 5 0 - 1 3 5 0 - 1 4 0 0 - 1 6 5 0
16.8 - 1 5 - 14
- 92.5
- 1.3 - 73
10-0 - 1600
0 - 130 - 9 0 - 98
ebullición
°C
300 316
175-350 380-400
170
2500
2500 2600
56.1
118 27 102
19.5
86 - 1 0
338 ~2600
100 78.4 78 66
cambio
)ara el intervalo de
Conduct. térmica
K
W/(m-K) ' "
0.17 0.15 0.12 0.126 0.15
47-58 52.3 46.5 25.6
0.50
0.53
0.5 11.20
0.58 0.17-0.23
0.16
Calor específico
c
KjV(kg-K)'-''
1.97
1.67 1.84
0.46 0.502 0.461 0.498
3.14
2.72 1.34
1.38 0.80
4.183 2.42
2.51
"Ver las notas en la página Z 9
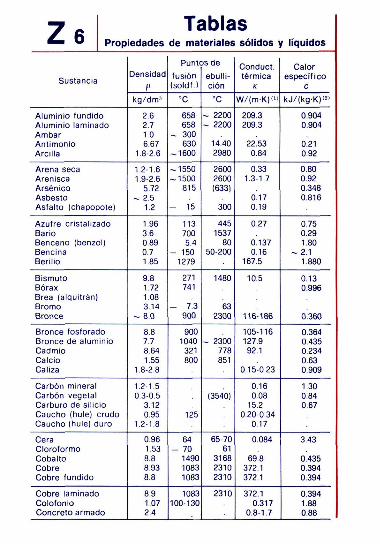
Ze Tablas Propiedades de materiales sólidos y líquidos
Sustancia
Aluminio fundido Aluminio laminado Ámbar Antimonio Arcilla
Arena seca Arenisca Arsénico Asbesto Asfalto (chapopote)
Azufre cristalizado Bario Benceno (benzol) Bencina Berilio
Bismuto Bórax Brea (alquitrán) Bromo Bronce
Bronce fosforado Bronce de aluminio Cadmio Calcio Caliza
Carbón mineral Carbón vegetal Carburo de silicio Caucho (hule) crudo Caucho (hule) duro
Cera Cloroformo Cobalto Cobre Cobre fundido
Cobre laminado Colofonio Concreto armado
Densidad
P kg/dm :1
2.6 2.7 1.0 6.67
1.8-2.6
1.2-1.6 1.9-2.6
5.72 - 2.5
1.2
1.96 3.6 0.89 0.7 1.85
9.8 1.72 1.08 3.14
- 8 . 0
8.8 7.7 8.64 1.55
1.8-2.8
1.2-1.5 0.3-0.5
3.12 0.95
1.2-1.8
0.96 1.53 8.8 8.93 8 8
8.9 1.07 2.4
Puntos de fusión Isoldf.)
°C
658 658
- 300 630
-1600
-1550 -1500
815
- 15
113 700 5.4
- 150 1279
271 741
- 7.3 900
900 1040
321 800
125
64 - 70
1490 1083 1083
1083 100-130
ebullición
°C
- 2200 - 2200
14.40 2980
2600 2600 (633)
300
445 1537
80 50-200
1480
63 2300
- 2300 778 851
(3540)
65-70 61
3168 2310 2310
2310
Conduct. térmica
K
W/(m-K)<'>
209.3 209.3
22.53 0.84
0.33 1.3-1.7
0.17 0.19
0.27
0.137 0.16
167.5
10.5
116-186
105-116 127.9 921
0.15-0.23
0.16 0.08
15.2 0.20-0.34
0.17
0.084
69.8 372.1 372.1
372.1 0.317
0.8-1.7
Calor específico
c
kJ/(kg-K)<»
0.904 0.904
0.21 0.92
0.80 0.92 0.348 0.816
0.75 0.29 1.80
- 2.1 1.880
0.13 0.996
0.360
0.364 0.435 0.234 0.63 0.909
1.30 0.84 0.67
3.43
0.435 0.394 0.394
0.394 1.88 0.88
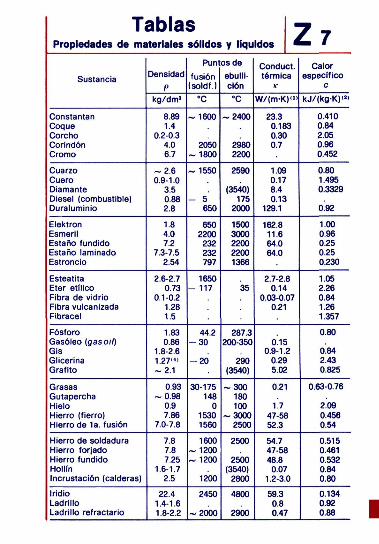
Tablas Propiedades de materiales sóildos y líquidos
Sustancia
Constantan Coque Corcho Corindón Cromo
Cuarzo Cuero Diamante Diesel (combustible) Duraluminio
Elektron Esmeril Estaño fundido Estaño laminado Estroncio
Esteatita Éter etílico Fibra de vidrio Fibra vulcanizada Fibracel
Fósforo Gasóleo (gaso//) Gis Glicerina Grafito
Grasas Gutapercha Hielo Hierro (fierro) Hierro de 1a. fusión
Hierro de soldadura Hierro forjado Hierro fundido Hollín Incrustación (calderas)
Iridio Ladrillo Ladrillo refractario
Densidad P
kg/dma
8.89 1.4
0.2-0.3 4.0 6.7
- 2 . 6 0.9-1.0
3.5 0.88 2.8
1.8 4.0 7.2
7.3-7.5 2.54
2.6-2.7 0.73
0.1-0.2 1.28 1.5
1.83 0.86
1.8-2.6 1.27«> - 2 . 1
0.93 - 0 . 9 8
0.9 7.86
7.0-7.8
7.8 7.8 7.25
1.6-1.7 2.5
22.4 1.4-1.6 1.8-2.2
Pun! fusión
(soldf ) °C
- 1 6 0 0
2050 - 1 8 0 0
- 1 5 5 0
- 5 650
650 2200
232 232 797
1650 - 117
44.2 - 3 0
- 2 0
30-175 148
0 1530 1560
1600 - 1 2 0 0 - 1200
1200
2450
- 2 0 0 0
os de ebullición
•c - 2 4 0 0
2980 2200
2590
(3540) 175
2000
1500 3000 2200 2200 1366
35
287.3 200-350
290 (3540)
- 3 0 0 180 100
- 3 0 0 0 2500
2500
2500 (3540)
2800
4800
2900
Conduct. térmica
K
W/(m-K)i'>
23.3 0.183 0.30 0.7
1.09 0.17 8.4 0.13
129.1
162.8 11.6 64.0 64.0
2.7-2.8 0.14
0.03-0.07 0.21
0.15 0.9-1.2
0.29 5.02
0.21
1 7 47-58 52.3
54.7 47-58 48.8
0.07 1.2-3.0
59.3 0.8 0.47
Calor específico
c kJ/(kg-K)<*>
0.410 0.84 2.05 0.96 0.452
0.80 1.495 0.3329
0.92
1.00 0.96 0.25 0.25 0.230
1.05 2.26 0.84 1.26 1.357
0.80
0.84 2.43 0.825
0.63-0.76
2.09 0.456 0.54
0.515 0.461 0.532 0.84 0.80
0.134 0.92 0.88
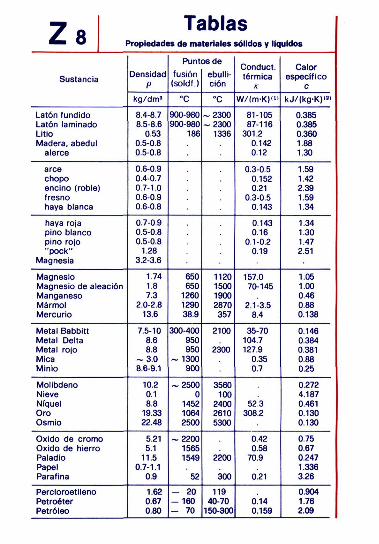
Zs Tablas Propiedades de materiales sólidos y líquidos
Sustancia
Latón fundido Latón laminado Litio Madera, abedul
alerce
arce chopo encino (roble) fresno haya blanca
haya roja pino blanco pino rojo "pock"
Magnesia
Magnesio Magnesio de aleación Manganeso Mármol Mercurio
Metal Babbitt Metal Delta Metal rojo Mica Minio
Molibdeno Nieve Níquel Oro Osmio
Oxido de cromo Oxido de hierro Paladio Papel Parafina
Percloroetileno Petroéter Petróleo
Densidad P
kg/dma
8.4-8.7 8.5-8.6
0.53 0.5-0.8 0.5-0.8
0.6-0.9 0.4-0.7 0.7-1.0 0.6-0.9 0.6-0.8
0.7-0.9 0.5-0.8 0.5-0.8
1.28 3.2-3.6
1.74 1.8 7.3
2.0-2.8 13.6
7.5-10 8.6 8.8
- 3 . 0 8.6-9.1
10.2 0.1 8.8
19.33 22.48
5.21 5.1
11.5 0.7-1.1
0.9
1.62 0.67 0.80
Punt fusión (soldf.)
°C 900-900-
380 980 186
650 650
1260 1290 38.9
300-400 950 950
- 1 3 0 0 900
- 2 5 0 0 0
1452 1064 2500
- 2 2 0 0 1565 1549
52
- 20 - 1 6 0 - 70
as de
ebullición
°C - 2 C - 2 C
i :
00 00 36
1120 1500 1900 2870 357
2100
2300
3560 100
2400 2610 5300
2200
300
119 40-70
150-300
Conduct. térmica
K
W/ím-K)<»
81-105 87-116
301.2 0.142 0.12
0.3-0.5 0.152 0.21
0.3-0.5 0.143
0.143 0.16
0.1-0.2 0.19
157.0 70-145
2.1-3.5 8.4
35-70 104.7 127.9
0.35 0.7
52.3 308.2
0.42 0.58
70.9
0.21
0.14 0.159
Calor específico
c kJ/(kg-K)<»>
0.385 0.385 0.360 1.88 1.30
1.59 1.42 2.39 1.59 1.34
1.34 1.30 1.47 2.51
1.05 1.00 0.46 0.88 0.138
0.146 0.384 0.381 0.88 0.25
0.272 4.187 0.461 0.130 0.130
0.75 0.67 0.247 1.336 3.26
0.904 1.76 2.09
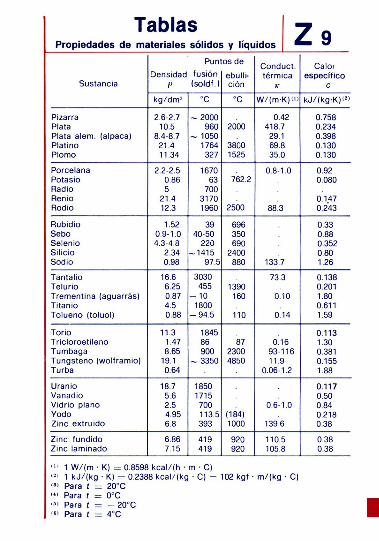
Tablas Propiedades de materiales sólidos y líquidos
Sustancia
Pizarra Plata Plata alem. (alpaca) Platino Plomo
Porcelana Potasio Radio Renio Rodio
Rubldio Sebo Selenio Silicio Sodio
Tantalio Telurio Trementina (aguarrás) Titanio Tolueno (toluol)
Torio Tricloroetileno Tumbaga Tungsteno (wolframio) Turba
Uranio Vanadio Vidrio plano Yodo Zinc extruido
Zinc fundido Zinc laminado
Densidad l>
kg/dm : t
2.6-2.7 10.5
8.4-8.7 21.4 11.34
2.2-2.5 0.86 5
21.4 12.3
1.52 0.9-1.0 4.3-4.8
2.34 0.98
16.6 6.25 0.87 4.5 0.88
11.3 1.47 8.65
19.1 0.64
18.7 5.6 2.5 4.95 6.8
6.86 7.15
Puntos de
fusión (soldf.)
c - 2 0 0 0
960 ~ 1050
1764 327
1670 63
700 3170 1960
39 40-50
220 -1415
97.5
3030 455
- 1 0 1800
- 9 4 5
1845 - 8 6
900 - 3350
1850 1715 700 113.5 393
419 419
ebullición
°C
2000
3800 1525
762.2
2500
696 350 690
2400 880
1390 160
110
87 2300 4850
(184) 1000
920 920
"< 1 W/(m • K) = 0.8598 kcal/(h ■ m ■ C) <-' 1 kJ/ (kg ■ K) = 0.2388 kcal/(kg ■ C) = 102 kgf ■ 131 Para t = 20°C 1,1 Para í = 0°C 151 Para í = — 20°C 161 Para í = 4°C
■
á Conduct. térmica
K
W/(m-K)«>
0.42 418.7
29.1 69.8 35.0
0.8-1.0
88.3
133.7
73.3
0.10
0.14
0.16 93-116 11.9
0.06 1.2
0.6-1.0
139.6
110.5 105.8
m/(kg • C)
Z9 Calor
específico c
kJ/(kg-K)<2>
0.758 0.234 0.398 0.130 0.130
0.92 0.080
0.147 0.243
0.33 0.88 0.352 0.80 1.26
0.138 0.201 1.80 0.611 1.59
0.113 1.30 0.381 0.155 1.88
0.117 0.50 0.84 0.218 0.38
0.38 0.38
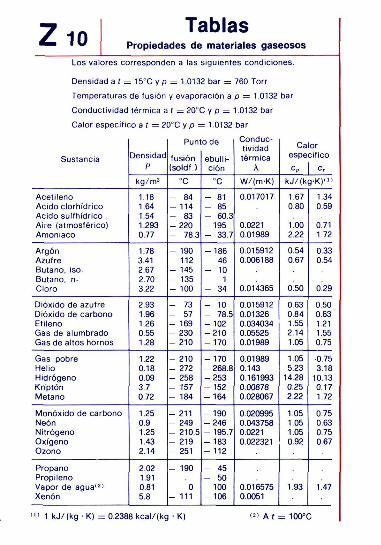
Zio Tablas Propiedades de materiales gaseosos
Los valores ce
Densidad a f =
rrespond
: 15°Cyp
Temperaturas de fusión
3n a las siguientes condiciones.
= 1.0132 bar = 760 Torr
y evaporación a p = 1.0132 bar
Conductividad térmica a t = 20°C y p = 1.0132 bar
Calor específico a í = 20°C y p = 1.0132 bar
Sustancia
Acetileno Acido clorhídrico Acido sulfhídrico Aire (atmosférico) Amoniaco
Argón Azufre Butano, iso-Butano, n-Cloro
Dióxido de azufre Dióxido de carbono Etíleno Gas de alumbrado Gas de altos hornos
Gas pobre Helio Hidrógeno Kriptón Metano
Monóxido de carbono Neón Nitrógeno Oxígeno Ozono
Propano Propileno Vapor de agua (2 )
Xenón
» 1 k jV (kg-K) = = 0.238
Densidad 1'
kg/m 3
1.18 1.64 1.54 1 293 0.77
1.78 3.41 2.67 2.70 3.22
2.93 1.96 1.26 0.55 1.28
1.22 0.18 0.09 3.7 0.72
1.25 0.9 1.25 1.43 2.14
2.02 1.91 0.81 5.8
Bkcal/(ks
Punto de
fusión Iso ld f ]
°C
- 84 - 114 - 83 - 220 - 78.3
- 190 112
- 145 - 135 - 100
- 73 - 57 - 169 - 230 - 210
- 210 - 272 - 258 - 157 - 184
- 211 - 249 - 210.5 - 219 - 251
- 190
0 - 111
K)
ebullición
°C
- 81 - 85 - 60.3 - 1 9 5 - 337
- 1 8 6 46
- 10 1
- 34
- 10 - 78.5 - 1 0 2 - 2 1 0 - 1 7 0
- 1 7 0 - 268.8 - 2 5 3 - 1 5 2 - 1 6 4
- 1 9 0 - 2 4 6 - 195.7 - 1 8 3 - 112
- 45 - 50
100 - 106
Conductividad térmica
A
W/(m-K)
0.017017
0.0221 0.01989
0.015912 0.006188
0.014365
0.015912 0.01326 0.034034 0.05525 0.01989
0.01989 0.143 0.161993 0.00878 0.028067
0.020995 0.043758 0.0221 0.022321
0.016575 0.0051
<2> A t
Calor específico
c„ Cr
kJ/(kg-K|">
1.67 0.80
1.00 2.22
0.54 0.67
0.50
0.63 0.84 1.55 2.14 1.05
1.05 5.23
14.28 0.25 2.22
1.05 1.05 1.05 0.92
1.93
= 100°(
1.34 0.59
0.71 1.72
0.33 0.54
0.29
0.50 0.63 1.21 1.55 0.75
0.75 3.18
10.13 0.17 1.72
0.75 0.63 0.75 0.67
1.47
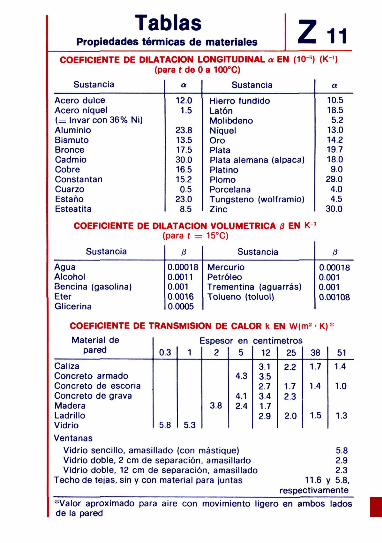
Tablas Propiedades térmicas de materiales Z11
COEFICIENTE DE DILATACIÓN LONGITUDINAL a EN (10"' (para t de 0 a 100°C)
(K-i)
Sustancia
Acero dulce Acero níquel ( = l n v a r c o n 3 6 % Ni) Aluminio Bismuto Bronce Cadmio Cobre Constantan Cuarzo Estaño Esteatita
a
12.0 1.5
23.8 13.5 17.5 30.0 16.5 15.2 0.5
23.0 8.5
Sustancia
Hierro fundido Latón Molibdeno Níquel Oro Plata Plata alemana (alpaca) Platino Plomo Porcelana Tungsteno (wolframio) Zinc
a
10.5 18.5 5.2
13.0 14.2 19.7 18.0 9.0
29.0 4.0 4.5
3 0 0
COEFICIENTE DE DILATACIÓN VOLUMÉTRICA fi EN K (para t = 15°C)
Sustancia
Agua Alcohol Bencina (gasolina) Éter Glicerina
13
0.00018 0.0011 0.001 0.0016 0.0005
Sustancia
Mercurio Petróleo Trementina (aguarrás) Tolueno (toluol)
|8
0.00018 0.001 0.001 0.00108
Material de pared
Caliza Concreto armado Concreto de escoria Concreto de grava Madera Ladrillo Vidrio
0.3
5.8
Espesor en 1
5.3
2
3.8
5
4.3
4.1 2.4
centímetros 12
3.1 3.5 2.7 3.4 1.7 2.9
25
?.?
1.7 2.3
2.0
38
1.7
1.4
1.5
51
1.4
1.0
1.3
Ventanas Vidrio sencillo, amasillado (con mástique) Vidrio doble, 2 cm de separación, amasillado Vidrio doble, 12 cm de separación, amasillado
Techo de tejas, sin y con material para ¡untas
5.8 2.9 2.3
11.6 y 5.8, respectivamente
"Valor aproximado para aire con movimiento ligero en ambos lados de la pared
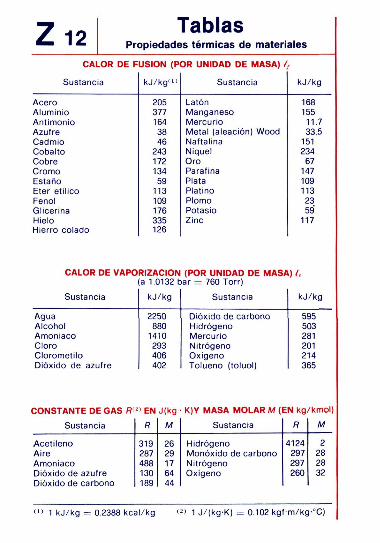
Z12 Tablas Propiedades térmicas de materiales
CALOR DE FUSIÓN (POR UNIDAD DE MASA) /
Sustancia
Acero Aluminio Antimonio Azufre Cadmio Cobalto Cobre Cromo Estaño Éter etílico Fenol Glicerina Hielo Hierro colado
kJ/kg<>>
205 377 164 38 46
243 172 134 59
113 109 176 335 126
Sustancia
Latón Manganeso Mercurio Metal (aleación) Wood Naftalina Níquel Oro Paraflna Plata Platino Plomo Potasio Zinc
k j / k g
168 155
11.7 33.5
151 234
67 147 109 113 23 59
117
CALOR DE VAPORIZACIÓN (POR UNIDAD DE MASA) /,. (a 1.0132 bar = 760 Torr)
Sustancia
Agua Alcohol Amoniaco Cloro Clorometi lo Dióxido de azufre
k j / k g
2250 880
1410 293 406 402
Sustancia
Dióxido de carbono Hidrógeno Mercurio Nitrógeno Oxígeno Tolueno (toluol)
k j / k g
595 503 281 201 214 365
CONSTANTE DE GAS R<2> EN J(kg ■ K)Y MASA MOLAR M (EN kg/kmol)
Sustancia
Aceti leno Aire Amoniaco Dióxido de azufre Dióxido de carbono
R
319 287 488 130 189
M
26 29 17 64 44
Sustancia
Hidrógeno Monóxido de carbono Nitrógeno Oxígeno
R
4124 297 297 260
M
2 28 28 32
<»> 1 kJ /kg = 0.2388 kca l /kg 1 J/(kg-K) = 0.102 kg fm/kg-°C)
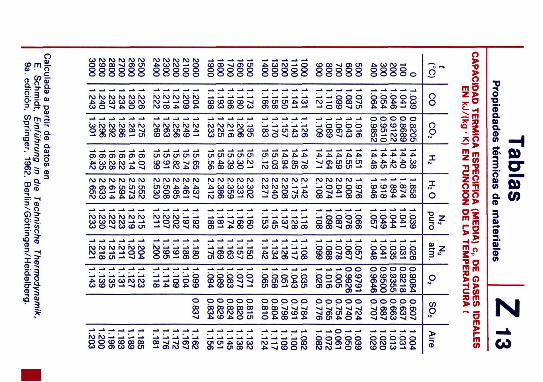
01 ct> Q. O o 13
U)
3 (Q CD
O
3 Q.
rn
C: 3-C
» o
1 0)
CU 3
í &
II
d CD
ÍD
(3
3 o
f S i
w r o M r o
8
M fe
o o
O J O - l
ro ro o o o o o o
•-I
-* «ÍV>
ro fO x .
Ni co
o o
M ro
O OÍ - i
O (O CO 00
S S S á á S « t ú ro
rvj <* ro
N>
ti
18
CJl
rvj
a co
ro Í*I o
ro
00
-»
03
ro
ro
ro
x*
. i *
ro
X*
ro ro ro l\)
co
ro
^ J
ro
ro
ro
■s] WCD Ul
ro
CJl
-*
ro
-* -4
ro ro - j
- i
¿5o1S
|s
-» ro
ScSSS
ro ro ro o o 8 8 8
M
° ro ro ro ro ro ro ro
-» ro
ro
-«. r\i
en en
CJl
CD
ro CJl
CJl
ro
o
ro _ i
ro
8 -* zi
ro
-'
00
ro o
X» - i
CJl
CJl
ro
ro
CD
-. M X*
(Ji
X»
ro x»
X» _ i
X>
CJi
CJl
ro
<JI
ro o
- j ro
-* 7*
CD -J
co o ro
-» l í
™ *
-» s
-. O
» j
r1
ro
i _* o
o
s N l s l O O )
-J ro
o o o o
r 1 -*
_! ^ r*
CD CD ro oo co en
-» u
CJl
- i
ro ro
en
->
CJl
o o o o
r»
s - i
K
CJl
o> ro CD o
ro ro ro ro
r*
- j
-» CD
CJl ro -* ro
X» CO CO C0 CO
ro
-O)
co
-vj en CJl
_» o
-» g
co
r* - j
X*
2 - i
o
r1
g CJl
Kí
r-
o
en
- k - i
o o
o o o o o
s co ro co co ro ro ro - *
en F;
CJl co ro
_ » — i
8 8 8 8 r*
en
-» ¡8
en
ro
ro ro -»j —' r*
B
J>
r * r *
en en ro o
_ » -* - j en
en -d o CD eo x»
ro ro ro ro o ro
r - r -
-
-» x>
_ J
o
-
-1 ■J
ro
X»
en
ro _ i
en
-x» co ro en -*J
co ro
_ i _ » _ 4
o o o en
x» - j
ro _ i
ro
^ co co
7*
--J CO
_* o
_» s
o o o o o 00 00 -*J ^J -J - * O CD CO 00 O - b O D _ t X»
i t o o S 6 \ i ( O O N
o o o o
r*
ro -1 - i
o
X» ^J —* ro _ i
ro
-
-s i o co
_ l
X»
2 ro
_ i
8 o o
■*J
_* en - i
X»
x» en
ro
2 CJl
s en
_» o o o co X. _ i 00 en
CO CO - J
i cu _ l
b b 00
_» o o
ro _ i
en en
^ - J
b - J
o o S5R
M en
co co ^
o o o o o -si - j - J
o> en
b b ro ro
X»
O
s
- j o
b o
- J
X.
I co
o o o o o
2 2 x» x . co en -» co
o o o o o
ro en ro o
X» X» X. X.
- i _ »
- * en ro ro co o ro co en
X» Xk Xk X* x» eo
_ i - * _ »
CD CD 00 00 00 CD ro
en x» 2 2 S
b b p i p b
55 -* Ü l - » 0 ) o o o o o CO CO CO CO CD en CJI co ro o en o
o o o o o *J O) ^J -*J sss W ^1 ^J
io'o b b b co o
o
o o
o o
I
I
o
£ y o
hz
o
en O
> CD
O > ■o > o
m o z > ^ o ^ Ü ir » u ? * o — > S K I z co ■n ■o r m
o í Í 2 tn * _ i " W2 H £
S ' ^ f ! n m > fi) H J»
3) m > V)
a m i » r m 0)
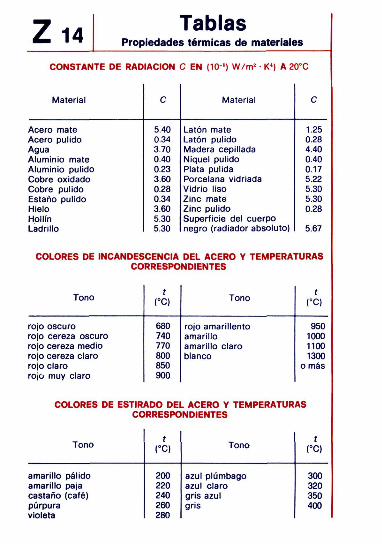
Tablas Propiedades térmicas de materiales
CONSTANTE DE RADIACIÓN C EN (10") W/m2 • K4) A 20°C
Material
Acero mate Acero pulido Agua Aluminio mate Aluminio pulido Cobre oxidado Cobre pulido Estaño pulido Hielo Hollín Ladril lo
C
5.40 0.34 3.70 0.40 0.23 3.60 0.28 0.34 3.60 5.30 5.30
Material
Latón mate Latón pulido Madera cepillada Níquel pulido Plata pulida Porcelana vidriada Vidrio liso Zinc mate Zinc pulido Superficie del cuerpo negro (radiador absoluto)
C
1.25 0.28 4.40 0.40 0.17 5.22 5.30 5.30 0.28
5.67
COLORES DE INCANDESCENCIA DEL ACERO Y TEMPERATURAS CORRESPONDIENTES
Tono
rojo oscuro ro¡o cereza oscuro rojo cereza medio ro¡o cereza claro rojo claro rojo muy claro
t <°C)
680 740 770 800 850 900
Tono
rojo amaril lento amaril lo amaril lo claro blanco
t (°C)
950 1000 1100 1300
o más
COLORES DE ESTIRADO DEL ACERO Y TEMPERATURAS CORRESPONDIENTES
Tono
amaril lo pálido amaril lo paja castaño (café) púrpura violeta
t (°C)
200 220 240 260 280
Tono
azul plumbago azul claro gris azul gris
í
reí
300 320 350 400
z
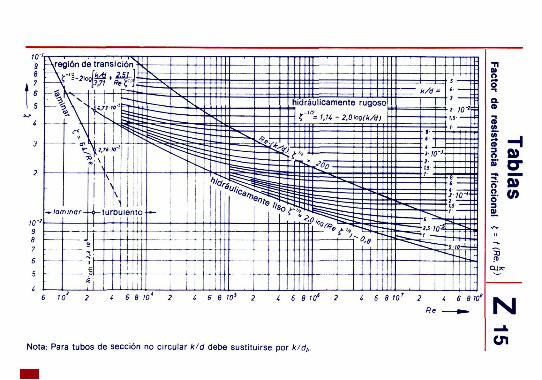
___, 8
s
4
2
W' 9 8
6 5
í
Nota
z%
—
•» lar
1
: Pa
f»-Wí**áíiJ V*
». \ d - * \
*£-
i 1 \¿,rs w""'
^'\
mnar-
-P
t* i
I L _
\ — 1 \ i
urbuien J I M
d
i
a tubc s d
í
I ¡
I i [ 1 . i ! 111
s
ecció
.1
ÍS í^ N
l ^ ^ Ü S
[■ 1 — .
0 —
,
¡ _L _^
S V
'
T -1
h,
i ) W' 2
n no circular
t
k
6
Id de
- ■ > -
^ r
*s¡¡
8 Ws 2
be sustituirs
__.
hidráulicamente
: '<'«'■
'ti
rugoso -í/2
' »/»M - 2,0\oQ(k/H)
í:=^ Effi1
o ^
T - ^ 7 I
=:: g «- 1 -—
"^?^55 . . . hg^
i 6 8 10' 2
i por k/d,,.
» >
— X
^4-~4* f
< 6 í
Ü S
?^S
k/d =
| ■'■¥ - < ■ - ! —
i- 10-'-f.S
-1 "1 — t - —
-J. H H ; ' J r ^ -
**. ffi
í
w ' ¿ Re
í
■4 — — -M í 4 ,
-? • u —■
4^-- I ! ! U
: i ■ 5
• i : H S m ; S- H" 3 ST IS
ccional
■r*
a i *
6 8 /O" ^ . ■
—. N Oí
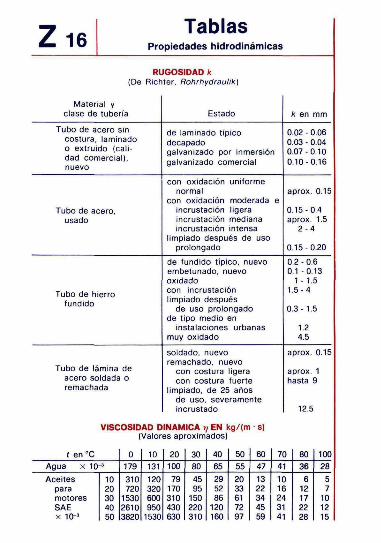
Z16 (De
Material y clase de tubería
Tubo de acero sin costura, laminado o extruldo (calidad comercial). nuevo
Tubo de acero. usado
Tubo de hierro fundido
Tubo de lámina de acero soldada o remachada
Tablas Propiedades hidrodinámicas
RUGOSIDAD * Richter, Rohrhydraulik)
Estado
de I; deca
mina pado
do típico
galvanizado por inmersión galvanizado comercial
con oxidación uniforme normal
con oxidación moderada incrustación ligera incrustación mediana incrustación intensa
limpiado después de uso prolongado
de fundido típico, nuevo embetunado, nuevo oxidado con incrustación limpiado después
de uso prolongado de tipo medio en
instalaciones urbanas muy oxidado
soldado, nuevo remachado, nuevo
con costura ligera con costura fuerte
limpiado, de 25 años de uso, severamente incrustado
VISCOSIDAD DINÁMICA >/ EN kg/(m - s) (Valores aproximados)
t en°C Agua x K>s
Aceites para motores SAE x 10-1
10 20 30 40 50
0 179
310 720
1530 2610 3820
10 131 120 320 600 950
1530
20 100 79
170 310 430 630
30 80 45 95
150 220 310
40 65 29 52 86
120 160
50 55 20 33 61 72 97
60 47 13 22 34 45 59
e
k en mm
0.02 - 0.06 0.03 - 0.04 0.07-0 10 0.10-0.16
aprox. 0.15
0.15-0.4 aprox. 1.5
2 - 4
0.15-0.20
0.2 - 0.6 0.1 -0.13
1-1.5 1.5-4
0.3- 1.5
1.2 4.5
aprox. 0.15
aprox. 1 hasta 9
12.5
70 41
10 16 24 31 4
80 36
6 12 17 22 28
100 28
5 7
10 12 15
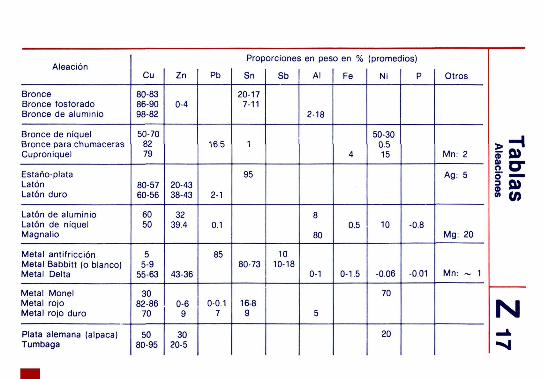
Aleación
Bronce Bronce fosforado Bronce de aluminio
Bronce de níquel Bronce para chumaceras Cuproníquel
Estaño-plata Latón Latón duro
Latón de aluminio Latón de níquel Magnalio
Metal antifricción Metal Babbitt (o blanco) Metal Delta
Metal Monel Metal rojo Metal rojo duro
Plata alemana (alpaca) Tumbaga
Cu
80-83 86-90 98-82
50-70 82 79
80-57 60-56
60 50
5 5-9
55-63
30 82-86
70
50 80-95
Zn
0-4
20-43 38-43
32 39.4
43-36
0-6 9
30 20-5
Pb
16.5
2-1
0.1
85
0-0.1 7
Prop
Sn
20-17 7-11
1
95
80-73
16-8 9
orcioneí
Sb
10 10-18
> en pes
Ai
2-18
8
80
0-1
5
o en %
Fe
4
0.5
0-1.5
(promedios)
Ni P
50-30 0.5 15
10
-0.06
70
20
-0.8
-0.01
Otros
Mn: 2
Ag: 5
Mg: 20
Mn: ~ 1
Tablas A
leaciones
N *«J
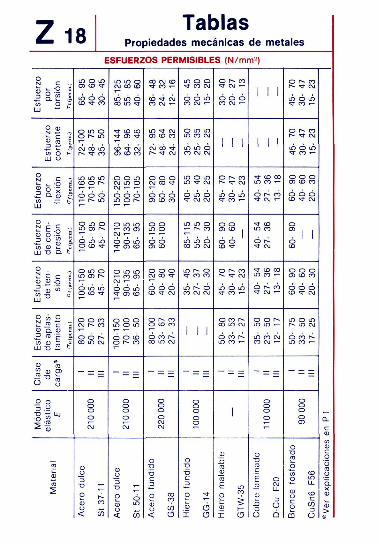
z 1 8 Tablas Propiedades mecánicas de metales
ESFUERZOS PERMISIBLES (N/mm-)
fuer
zo
por
rsió
n
« o L U * "
O (D
b- c V CD 3 - ^
"Si o L U O
8 = S 8 x 3 Q- tu CO ~ U J
o , N C C
S § : 2 W 0 ) ^
U J T 3 a
o í l c c tD 0 . O
3 0) ' » "> -o
L U
O l Í ° ~ JS c D a a> w <U m
L U " O 2
a> %
2%? O S
o o
fiuj I -- = CU
CD
2 ro 5
£
= s-
3
¿T
i i b
s
b"
= a
b
m o LO CD co *r i f i Ó Ó CD - 3 " CO
O LO O O M O
CM co LO i ^ T co
LO LO L O co o r~
ó ó ó T - i * - L O
*"" o i n o LO CD r -r ¡ " ó iñ LÓ o CD ^r "" o r n o L O <j> r ^
^ Ó LÓ LÓ 0 < £ ) ^ I
O O CO CM r» co » ■ ■
ó ó r- C O L f l ( M
O O o o C\J
CU O
" O * -
2 í CD CO
< CO
LO LO o CM CO CD
uó ió ó c o m ■q-
T CD CO T O ) 1
CD - í f CVJ O ) CD CO
o o LO C M L O O ( M T - T —
Ó Ó Ó m o r» *~ t—
o L O L O T - CO CD CM i -
o ó in T CD CO
*"" o LO LO <— CO CD C\J t -
O O LO •3" CD CO r~ O O O LO o un t— T~
Ó Ó CO o r^ co *""
o o o o CM
CD
" O ^Z
2 ó < C/D
CO C\J C D
CO * á - CM CO CM t -
m ^ OJ CD CD CO
CM có «r ( ^ " 3 " CNJ
o o o CM CO ^
Ó Ó Ó CD CD CO
O O L O O *— r~
Ó Ó CD CO
O O O CM CO ^ T ,— O O O CO ^ T CM
O r- co O CD CO
*7 CD co r -0 0 L O CM
o o o o CM CM
o
" O c D
8 8 8 có < o
l O O O " T CO CM
Ó Ó LO CO <M T -
O L O LO L O CO CM
l Ó L O Ó CO CM CM
L O O L O LO <r CM
Ó LO Ó ■3" O J CM
L O LO O t - r ^ c o
*~ l Ó L O Ó CO LO ( M
LO r- o ^ í - CO CO
LO r- o CO CM CM
1 1 1
o o o o o
o T 3
c: D
o 2
X O
o r- co <3" CM <—
ó ó ó CO CM i -
1 I I
o r^ co N ^ r c v j
L O CD t Ó ^r co i -
o o CD CD |
, . 1 O O CD T
o r- co r*- <r csj LO O L O ■ST CO r -
o co r-CO L O CM
Ó có r -l O CO i -
|
cu . a cu CD
CD
E LO o <?
1 S X O
1 1 1
1 1 1
* T CD CO L O f O r -
CD r^ có ■3" CM r -
* t CD L O CO
ó r¿. < í CM
<3" CD CO L O CO i —
CD r^ có « T CM t—
O O r -L O l f i r -
LO CO CM CO CM t ~
O O O
O
T -
o " O CD C
E o
CD
1 9 Ü O
o r ~ c o r - . * d - C M
l Ó CD L Ó T CO t -
o r^ co r- ^r CM
LO CD L O T C O ' -
O O O CD CD CO
C D CD Ó CO " T CM
O O ) . .
. 1 1 o co
o o o C D CD CO
CD CD Ó CD ^ r CM
LO O L O r - L O C M
CD có r -LO CO 1-
o o o o CD
o -o
o
O \? — U -
i 1 CO Ü
r -Q_
CD
LO !D C O
03 CJ
Q . X QJ
CD >
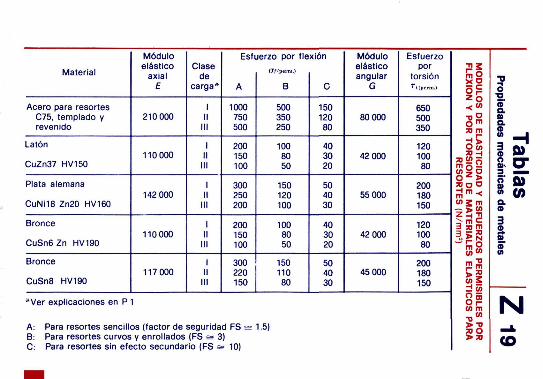
Material
Acero para resortes C75, templado y revenido
Latón
CuZn37 HV150
Plata alemana
CuNi18 Zn20 HV160
Bronce
CuSn6Zn HV190
Bronce
CuSn8 HV190
*Ver explicaciones en P
A: Para resortes sencill B: Para resortes curvos C: Para resortes sin efí
Módulo elástico
axial E
210 000
110 000
142 000
110 000
117 000
l
DS (factor de y enrollados
¡cto secunda
Clase de
carga*
III
III
III
III
III
segurida (FS = 3 io (FS a
Esfuerzo por flexión ÍT/íperm.)
A B C
1000 750 500
200 150 100
300 250 200
200 150 100
300 220 150
d F S a I t 10)
500 350 250
100 80 50
150 120 100
100 80 50
150 110 80
1.5)
150 120 80
40 30 20
50 40 30
40 30 20
50 40 30
Módulo elástico angular
G
80 000
42 000
55 000
42 000
45 000
Esfuerzo por
torsión Tí( p e l -m.)
650 500 350
120 100 80
200 180 150
120 100 80
200 180 150
"S í ? 9^ z o o m
70 m O o) 70 H
"525 m ñ -O z > </> 2 m z H ? 3 TB m
i
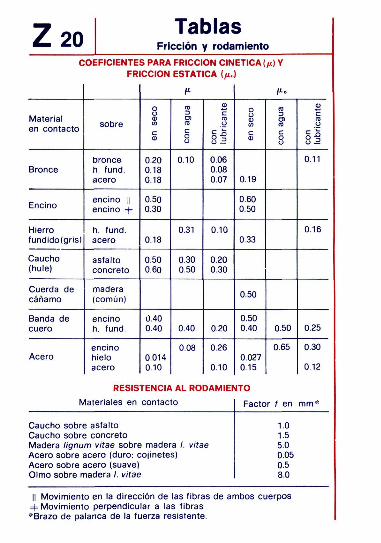
Z 20 Tablas Fricción y rodamiento
COEFICIENTES PARA FRICCIÓN CINÉTICA (/x) Y FRICCIÓN ESTÁTICA (/*„)
Material en contacto
Bronce
Encino
Hierro fundido(gris)
Caucho (hule)
Cuerda de cáñamo
Banda de cuero
Acero
sobre
bronce h. fund. acero
encino | encino 4=
h. fund. acero
asfalto concreto
madera (común)
encino h. fund.
encino hielo acero
0 0 Q (O c 0)
0.20 0.18 0.18
0.50 0.30
0.18
0.50 0.60
0.40 0.40
0.014 0.10
í 1
01
c 0 0
0.10
0.31
0.30 0.50
0.40
0.08
0
ce 0
§ 1 0 —
0.06 0.08 0.07
0.10
0.20 0.30
0.20
0.26
0.10
0 0 a> ti) c 0>
0.19
0.60 0.50
0.33
0.50
0.50 0.40
0.027 0.15
(*-(0 O) a c O 0
0.50
0.65
£ c co 0
§ 1 ü —
0.11
0.16
0.25
0.30
0.12
RESISTENCIA AL RODAMIENTO Materiales en contacto
Caucho sobre asfalto Caucho sobre concreto Madera lignum vitae sobre madera /. vitae Acero sobre acero (duro: cojinetes) Acero sobre acero (suave) Olmo sobre madera /. vitae
Factor t en m m *
1.0 1.5 5.0 0.05 0.5 8.0
|| Movimiento en la dirección de las fibras de ambos cuerpos =|= Movimiento perpendicular a las fibras *Brazo de palanca de la fuerza resistente.
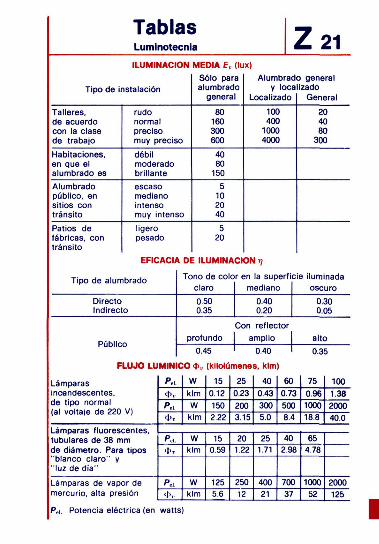
Tablas Luminotecnia Z21 ILUMINACIÓN MEDIA E. (lux)
Tipo de Instalación Sólo para alumbrado
general
Alumbrado general y localizado
Localizado General
Talleres, de acuerdo con la clase de trabajo
rudo normal preciso muy preciso
80 160 300 600
100 400
1000 4000
20 40 80
300
Habitaciones, en que el alumbrado es
débil moderado brillante
40 80
150
Alumbrado público, en sitios con tránsito
escaso mediano Intenso muy Intenso
5 10 20 40
Patios de fábricas, con tránsito
ligero pesado
5 20
EFICACIA DE ILUMINACIÓN r¡
Tipo de alumbrado Tono de color en la superficie iluminada claro mediano oscuro
Directo Indirecto
0.50 0.35
0.40 0.20
0.30 0.05
Público profundo
Con reflector amplio alto
0.45 ' 0.40
FLUJO LUMÍNICO ♦ „ (kllolúmenes, klm)
0.35
Lámparas incandescentes, de tipo normal (al voltaje de 220 Vj
klm
15 0.12 150 222
25 0.23 200 3.15
40 0.43 300
60 0.73 500 8.4
75 0.96 1000
100 138 2000 40.0
Lámparas fluorescentes, tubulares de 38 mm de diámetro. Para tipos "blanco claro" y "luz de día"
P,i.
,|,(. 15
059 20 25
2.98 65
Lámparas de vapor de mercurio, alta presión
Pei. Potencia eléctrica (en watts)
125 400 700 1000 2000
' ! > , 12 21 37
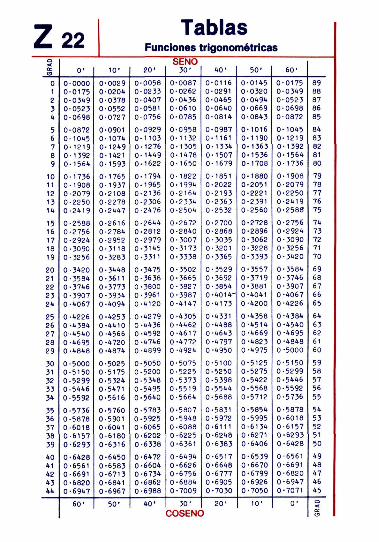
7 ¿ . ¿ ¿
o
0 1 2 3 4
5 6 7 e 9
10 11 12 13 14
15 16 17 18 19
20 21 22 2 3 24
25 26 2 7 2 8 29
30 31 32 33 34
35 36 37 3 8 39
40 41 42 4 3 44
0 '
0-0000 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0175 0349 0523 0698 0872 1045 1219 1392 1564 1736 1908 2079 2250 2419 2588 2756 2924 3090 3256 3420 3584 3746 3907 4067 4226 4384 4540 4695 4848 5000 5150 5299 5446 5592 5736 5878 6018 6157 6293 6428 6561 6691 6820 6947 6 0 '
1 0 '
0-0029 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0
0204 0378 0552 0727 0901 1074 1249 1421 1593 1765 1937 2108 2278 2447 2616 2784 2952 31 18 3283 3448 3611 3773 3934 4094
4253 4410 4566 4720 4874
5025 5175 5324 5471 5616 5760 5901 6041 6180 6316 6450 6583 6713 6841
0-6967 5 0 '
Tablas Funciones trigonométricas
2 0 '
0-0058 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0
0233 0407 0581 0756 0929 1103 1276 1449 1622 1794 1965 2136 2 306 2476 2644 2812 2979 3145 3311 3475 3638 3800 3961 4120 4279 4436 4592 4746 4899 5050 5200 5348 5495 5640 5783 5925 6065 6202 6338 6472 6604 6734 6862
0-6988 4 0 '
SENO 3 0 '
0-0087 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0
0262 0436 0610 0785 0958 1132 1305 1478 1650 1822 1994 2164 2334 2504 2672 2840 3007 3173 3338 3502 3665 3827 3987 4147 4305 4462 4617 4772 4924 5075 5225 5373 5519 5664 5807 5948 6088 6225 6361 6494 6626 6756 6884
0-7009 3 0 '
ce )SENC
4 0 '
0-0116 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0
0291 0465 0640 0814 0987 1161 1334 1507 1679 1851 2022 2193 2 363 2532 2700 2868 3035 3201 3365 3529 3692 3854 4014" 4173 4331 4488 4643 4797 4950 5100 5250 5398 5544 5688 5831 5972 6111 6248 6383 6517 6648 6777 6905
0-7030 2 0 -
)
5 0 '
0-0145 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0
0320 0494 0669 0843 1016 1190 1363 1536 1708 1880 2051 2221 2391 2560 2728 2896 3062 3228 3393 3557 3719 3881 4041 4200 4358 4514 4669 4823 4975 5125 5275 5422 5568 5712 5854 5995 6134 6271 6406 6539 6670 6799 6926
0-7050 1 0 '
6 0 '
0-0175 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0
0349 0523 0698 0872 1045 1219 1392 1564 1736 1908 2079 2250 2419 2588 2756 2924 3090 3256 3420 3584 3746 3907 4067 4226 4384 4540 4695 4848 5000 5150 5299 5446 5592 5736 5878 6018 6157 6293 6428 6561 6691 6820 6947
0-7071 0 '
8 9 88 87 86 8 5
84 8 3 82 81 80
79 78 77 76 75
74 7 3 72 71 70
69 68 67 66 6 5
64 6 3 62 61 60
59 5 8 57 56 5 5
54 5 3 52 51 50
49 4 8 47 46 4 5
o ■a C3
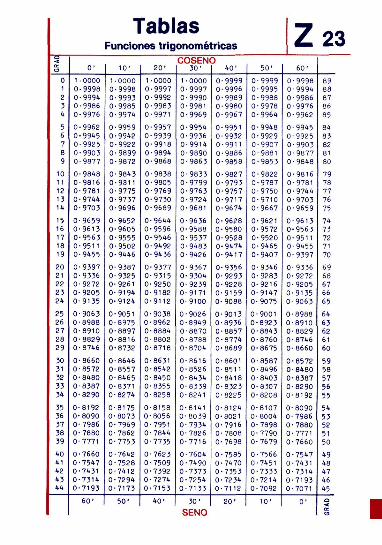
a CE
0 1 2 3 4
5 6 7 8 9
10 11 12 13 14
15 16 17 18 19
20 21 22 2 3 2 4
2 5 26 27 2 8 29
30 31 32 33 34
35 36 37 38 39
40 41 42 4 3 44
0 '
1-0000 0-9998 0-9994 0-9986 0-9976 0-9962 0-9945 0-9925 0-9903 0-9877 0-9848 0-9816 0-9781 0-9744 0-9703 0-9659 0-9613 0-9563 0-9511 0-9455 0-9397 0-9336 0-9272 0-9205 0-9135 0-9063 0-8988 0-8910 0-8829 0-8746 0-8660 0-8572 0-8480 0-8387 0-8290 0-8192 0-8090 0-7986 0-7880 0-7771 0-7660 0-7547 0-7431 0-7314 0-7193
6 0 '
Tablas Funciones trigonométricas
1 0 '
1-0000 0-9998 0-9993 0-9985 0-9974 0-9959 0-9942 0-9922 0-9899 0-9872 0-9843 0-9311 0-9775 0-9737 0-9696 0-9652 0-9605 0-9555 0-9502 0-9446 0-9387 0-9325 0-9261 0-9194 0-9124 0-9051 0-8975 0-8897 0•8816 0-8732 0-8646 0-8557 0-8465 0-8371 0-8274
0-8175 0-8073 0-7969 0-7862 0-7753 0-7642 0-7528 0•7412 0-7294 0-7173
5 0 '
2 0 '
1-0000 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0
c 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0
9997 9992 9983 9971 9957 9939 9918 9894 9868 9838 9805 9769 9730 9689 9644 9596 9546 9492 9436 9377 9315 9250 9182 9112 9038 8962 8884 8802 8718 8631 8542 8450 8355 8258 8158 8056 7951 7844 7735 7623 7509 7392 7274
0-7153 4 0 '
7 ¿m
COSENO 3 0 '
1•0000 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0
9997 9990 9981 9969 9954
4 0 '
0-9999 0 0 0 0
0 9936 0 9914 9890 9863 9833 9799 9763 9724 9681 9636 9588 9537 9483 9426 9367 9304 9239 9171 9100 9026 8949 8870 8788 8704 8616 8526 8434 8339 8241 8141 8039 7934 7826 7716 7604 7490 7373 7254
0-7133 3 0 '
5 ENO
0 0 0
0
c 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0
9996 9989 9980 9967
9951 9932 9911 9886 9858 9827 9793 9757 9717 9674 9628 9580 9528 9474 9417 9356 9293 9228 9159 9088 9013 8936 8857 8774 8689 8601 8511 8418 8323 8225 8124 8021 7916 7808 7698 7585 7470 7353 72 34
0-7112 2 0 '
5 0 '
0-9999 0-9995 0-9988 0-9978 0-9964 0-9948 0-9929 0-9907 0-9881 0-9853 0-9822 0-9787 0-9750 0-9710 0-9667 0-9621 0-9572 0-9520 0-9465 0-9407 0-9346 0-9283 0-9216 0-9147 0-9075 0-9001 0-8923 0-8843 0-8760 0-8675 0-8587 0-8496 0-8403 0-8307 0-8208 0-8107 0-8004 0-7898 0-7790 0-7679 0-7566 0•7451 0-7333 0 • 7214 0-7092
1 0 '
6 0 '
0-9998 0-9994 0-9986 0-9976 0-9962 0-9945 0-9925 0-9903 0-9877 0-9848 0-9816 0-9781 0-9744 0-9703 0-9659 0-9613 0-9563 0-9511 0-9455 0-9397 0-9336 0-9272 0-9205 0-9135 0-9063 0-8988 0-8910 0-8829 0-8746 0-8660 0-8572 0-8480 0-8387 0-8290 0-8192 0-8090 0-7986 0-7880 0-7771 0-7660 0-7547 0-7431 0-7314 0-7193 0-7071
0 '
23 89 B8 a? 66 85
84 8 3 8? 81 30
79 78 77 76 75
74 73 72 71 70
69 68 67 66 65
64 63 62 61 60
59 58 57 56 55
54 53 52 51 50
49 48 47 46 45
-t a: C3
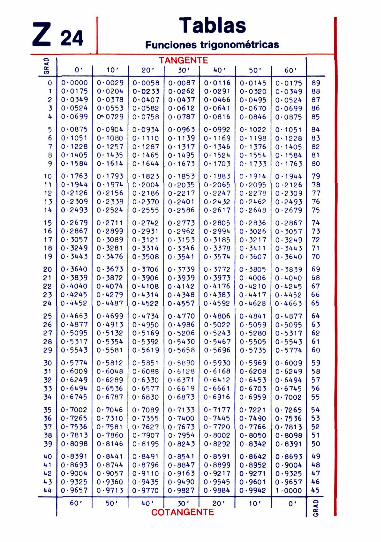
7 Cm ¿H O:
0 1 2 3 4
5 6 7 8 9
10 11 12 13 14
15 16 17 18 19
20 21 22 23 24
25 26 27 28 29
30 31 32 33 34
35 36 37 38 39
40 41 42 43 44
0 '
0 -0000 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0
0175 0349 0524 0699
0875 1051 1228 1405 1584
1763 1944 2126 2309 2493
2679 2867 3057 3249 3443
3640 3839 4040 4245 4452
4663 4877 5095 5317 5543
5774 6009 6249 6494 6745
7002 7265 7536 7813 8098
8391 8693 9004 9325
0 -9657
6 0 '
10 '
0 -0029 0 -0204 0 -0378 0 -0553 0*0729
0 -0904 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0
1080 1257 1435 1614
1793 1974 2156 2339 2524
2711 2899 3089 3281 3476
3673 3872 4074 4279 4487
4699 4913 5132 5354 5581
5812 6048 6289 6536 6787
7046 7310 7581 7860 8146
8441 8744 9057 9360
0 -9713
5 0 '
Tablas Funciones trigonométricas
TANGENTE 2 0 '
0 -0058 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0
02 33 0407 0582 0758
0934 1110 1287 1465 1644
1823 2004 2186 2370 2555
2742 2931 3121 3314 3508
3706 3906 4108 4314 4522
4734 4950 5169 5392 5619
5851 6083 6330 6577 6830
7089 7355 7627 7907 8195
8491 8796 91 10 9435
0 -9770
4 0 '
co
3 0 '
0 - 0 0 8 7 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0
0262 0437 0612 0787
0963 1139 1317 1495 1673
1853 2035 2217 2401 2586
2773 2962 3153 3346 3541
3739 3939 4142 4348 4557
4770 4986 5206 5430 5658
5890 6128 6371 6619 6873
7133 7400 7673 7954 8243
8541 8847 9163 9490
0 -9827
3 0 ' TA NGEr
4 0 '
0 -0116 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0
0291 0466 0641 0816
0992 1169 1346 1524 1703
1883 2065 2247 2432 2617
2805 2994 3185 3378 3574
3772 3973 4176 4383 4592
4806 5022 5243 5467 5696
5930 6168 6412 6661 6916
7177 7445 7720 8002 8292
8591 8899 9217 9545
0 -9884
2 0 '
n
5 0 '
0 -0145 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0
0320 0495 0670 0846
1022 1198 1376 1554 1733
1914 2095 2278 2462 2648
2836 3026 3217 341 1 3607
3805 4006 4210 4417 4628
4841 5059 5280 5505 5735
5969 6208 6453 6703 6959
7221 7490 7766 8050 8342
8642 8952 9271 9601
0 -9942
1 0 '
6 0 '
0 -0175 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 1
0349 0524 0699 0875
1051 1228 1405 1584 1763
1944 2126 2309 2493 2679
2867 3057 3249 344 3 3640
3839 4040 4245 4452 4663
4877 5095 5317 5543 5774
6009 6249 6494 6745 7002
7265 7536 7813 8098 8391
8693 9004 9325 9657 0000
0 '
89 88 87 86 85
84 83 82 81 80
79 78 77 76 75
74 73 72 71 70
69 68 67 66 65
64 63 62 61 60
59 58 57 56 55
54 53 52 51 50
49 48 47 46 45
<
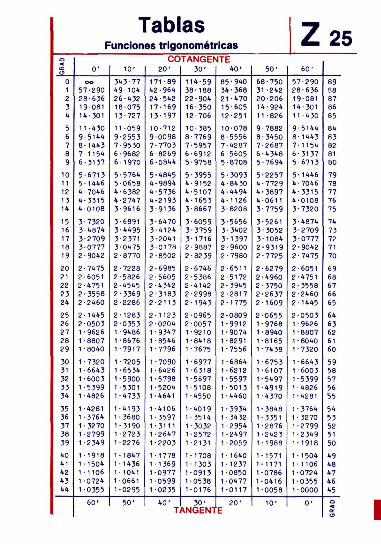
o ir
0 1 2 3 4
5 6 7 8 9
10 11 12 13 n 15 16 17 18 19
20 21 22 23 24
25 26 27 28 29
30 31 32 33 34
35 36 37 38 39 40 41 42 43 44
Tablas Funciones trigonométricas
0 '
oo 57 -290 28 -636 19-081 14-301
11-430 9 8 7 6
5 5 4 4 4
3 3 3 3 2
2 2 2 2 2
2 2 1 1 1
1 1 1 1 1
1 1 1 1 1
1 1 1 1
5144 1443 1154 3137
6713 1446 7046 3315 0108
7320 4874 2709 0777 9042
7475 6051 4751 3558 2460
1445 0503 9626 8807 8040
7320 6643 6003 5399 4826
4281 3764 3270 2799 2349
1918 1504 1106 0724
1-0355
6 0 '
10 '
343 -77 49 104 26 -432 1 8 0 7 5 13-727
11-059 9-2553 7 -9530 6-9682 6 -1970
5-5764 5-0658 4 -6382 4 -2747 3-9616
3-6891 3-4495 3-2371 3-0475 2 -8770
2 -7228 2-5826 2 -4545 2 -3369 2 -2286
2 -1283 2 -0353 1 9486 1-8676 1-7917
1•7205 1-6534 1■5900 1-5301 1-4733
1-4193 1■3680 1-3190 1-2723 1-2276
1-1847 1-1436 1-1041 1-0661 1-0295
5 0 '
COTANGENTE 2 0 '
171-89 42 -964 24 -542 17-169 13-197
10-712 9 -0098 7 -7703 6 -8269 6 -0844
5-4845 4 - 9 8 9 4 4 -5736 4 -2193 3-9136
3-6470 3-4124 3-2041 3-0178 2 -8502
2 -6985 2 -5605 2 -4342 2 - 3 1 8 3 2 -2113
2 -1123 2 -0204 1-9347 1-8546 1■7796
1•7090 1-6426 1-5798 1-5204 1-4641
1-4106 1-3597 1-3111 1-2647 1-2203
1-1778 1-1369 1-0977 1 0 5 9 9 1-02 35
4 0 ' T
3 0 '
114-59 38 -188 22 -904 16-350 12 706
10-385 8 7 6 5
5 4 4 4 3
3 3 3 2 2
2 2 2 2 2
2 2 1 1 1
1 1 1 1 1
1 1 1 1 1
1 1 1 1
7769 5957 6912 9758
3955 9152 5107 1653 8667
6059 3759 1716 9887 8239
6746 5386 4142 2998 1943
0965 0057 9210 8418 7675
6977 6318 5697 5108 4550
4019 3514 3032 2572 2131
1708 1303 0913 0538
1-0176
3 0 ' *N GEN7
4 0 '
85 ■ 940 34 -368 2 1 - 4 7 0 15-605 12-251
10-078 8 7 6 5
5 4 4 4 3
3 3 3 2 2
2 2 2 2 2
2 1 1 1 1
1 1 1 1 1
1 1 1 1 1
1 1 1 1
5556 4287 5605 8708
3093 8430 4494 1126 8208
5656 3402 1397 9600 7980
6511 5172 3945 2817 1775
0809 9912 9074 8291 7556
6864 6212 5597 5013 4460
3934 3432 2954 2497 2059
1640 1237 0850 0477
1-0117
2 0 ' E
5 0 '
68 -750 31 -242 20 -206 14-924 11-826
9 ■ 7882 8 -3450 7 -2687 6 -4348 5 -7694
5 -2257 4 - 7 7 2 9 4 -3897 4 -0611 3-7759
3-5261 3-3052 3-1084 2 -9319 2 -7725
2 - 6 2 7 9 2 -4960 2 3750 2 -2637 2 - 1 6 0 9
2 -0655 1-9768 1•8940 1-8165 1-7438
1-6753 1-6107 1-5497 1-4919 1-4370
1-3848 1-3351 1-2876 1-2423 1-1988
1-1571 1-1171 1-0786 1-0416 1-0058
10 '
7 ¿_ 6 0 '
57 -290 28 -636 19-081 14 ■ 301 11-430
9-5144 8 -1443 7-1154 6 -3137 5 -6713
5-1446 4 -7046 4 -3315 4 -0108 3-7320
3-4874 3-2709 3-0777 2 -9042 2 -7475
2 -6051 2 -4751 2 -3558 2 -2460 2-1445
2 -0503 1-9626 1-8807 1 •8040 1-7320
1-6643 1-6003 1-5399 1-4826 1-4281
1 - 3764 1 • 32 70 1 -2799 1-2349 1-1918
1•1504 1-1106 1 0 7 2 4 1-0355 1■0000
0 '
25 89 " 8 87 86 85
84 83 82 81 80
79 78 77 76 75
74 73 72 71 70
69 68 67 66 65
64 63 62 61 60
59 58 57 56 55
54 53 52 51 50
49 48 47 46 45 o
(3
PARTE II APLICACIONES AVANZADAS
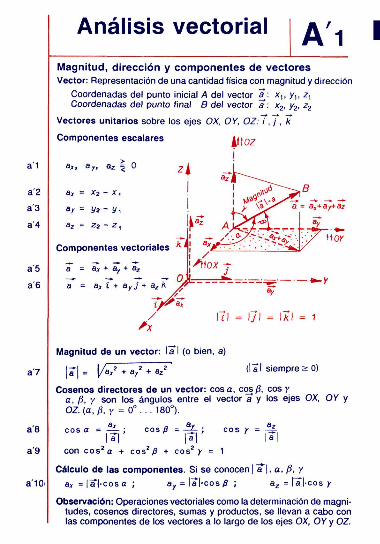
Análisis vectorial A'i Magnitud, dirección y componentes de vectores Vector: Representación de una cantidad física con magnitud y dirección
Coordenadas del punto inicial A del vector ? : x¡, y,, z, Coordenadas del punto final B del vector ~a: x2, y2. z2
Vectores unitarios sobre los ejes OX. OY, OZ: i , / , k
Componentes escalares Al I OZ
ax, a y, az 5 0
ax = x2 - x,
«y = !/2 - y,
az = z2- z,
Componentes vectoriales
a" = a, + ar + ar
- r t r ° a = ax i + ay j + a2 K
Magnitud de un vector: I? I (o bien, a)
|si- V* ax + ay + &z (15" I siempre £ 0)
Cosenos directores de un vector: eos a, eos /3, eos y a, j8, y son los ángulos entre el vector ~a y los ejes OX, OY y OZ.(a,p,y = 0° ... 180°).
a* „ 3/ cosa = ~ ; cos£ = ~=¡-
| a | | a] | o | con cos 2a + eos2¿8 + eos2 y = 1
Cálculo de las componentes. Si se conocen | a* |, a. />', y ax = laTI-cos a ; a„ = IcTt'COSj9 ; az = Pal-eos y
Observación: Operaciones vectoriales como la determinación de magnitudes, cosenos directores, sumas y productos, se llevan a cabo con las componentes de los vectores a lo largo de los ejes OX, OY y OZ.
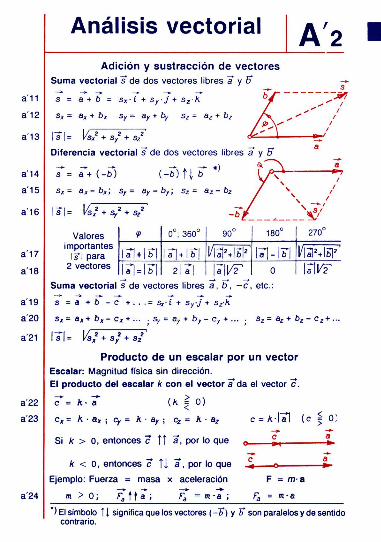
Análisis vectorial A'2 Adición y sustracción de vectores
Suma vectorial ? de dos vectores libres ? y £T
s = a + b = s*-1 + syj + s z A °A
sx = ax + bx Sy — ay + by Sj = a¿ + b¿
IT| = 14/+ s /+ s / Diferencia vectorial ;? de dos vectores libres a y ?
-► — -» - » - » « ) Sk' \ s = a + ( - b ) ( - b ) t | 6 s * = a * - £>*; Sy = o.y - by; Sz - Q
i s i - 14; + s/ + s?
9»
i¡n*is"i I-I-ISI
0°; 360°
\7\*\b\ 2\a\
90°
l/|¿W lílkT
180°
ITI-IFI 0
270°
IfiaMsi'" líllT
Valores importantes
I?I para 2 vectores
Suma vectorial s de vectores libres a, b, —c, etc.:
s = a + b - c + . . .= s,-¡ + Sy-j + s¿-A
s* = ax + bx~ cx + ... . sy = ay + by-cy + ... . s2 = az + bz~ cz + ...
I T I - l/s/ + s ; + s / ' Producto de un escalar por un vector
Escalar: Magnitud física sin dirección. El producto del escalar k con el vector i* da el vector c*.
U I o) c = A- a
Cjt« /t • a» ¡ Cf = Jt • ay ¡ C2 = k - az c = A• I al (c = 0)
Si k > 0, entonces c t í ?, por lo que
fc < 0, entonces ? TI ? , por lo que Ejemplo: Fuerza = masa x aceleración
m > 0 ; F 3 t f a ; í^ = m-a ;
") El símbolo Ti significa que los vectores (-V) y 5" son paralelos y de sentido contrario.
■
c
r*
c
F = ma
a nt-a
l %
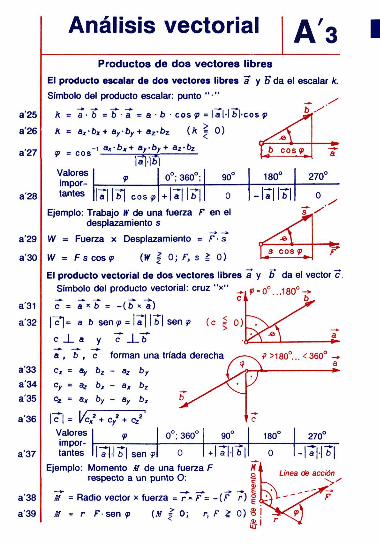
Análisis vectorial A'3 Productos de dos vectores libres
El producto escalar de dos vectores libres a* y b' da el escalar k. Símbolo del producto escalar: punto " • "
k = a • 6 » 6 • a « a • b ■ eos <r ■ lal- l bj-cos tp &
k m ax-bx+ ayby+ a¿-bz (k = 0)
f _ c o . - i a*-b,+ arby+ azbz
Valores importantes |a 11 b] eos j>
0o; 360°;
A7\\A 90°
0
^—-é\ •Jj eos?»
180°
-ITIITI
<s'
~ T
270°
0
Ejemplo: Trabajo if de una fuerza F en el ^ desplazamiento s s ^
W = Fuerza x Desplazamiento = F-s
W - F s c o s p (ir | 0 ; f", s í 0)
^ ^ e \ _s eos j>^
/
"~F El producto vectorial de dos vectores libres a y b da el vector c*
Símbolo del producto vectorial: cruz " x " _ , p = 0° i g o ° - * — — -~ — -►> c c = a * b = - ( b * a)
|~c*| = a b sen? = lá*| | b | sen g> (c | 0)
c _L a y c _ L b
a , b , c forman una triada derecha ^~
c» = ay bz - a¿ by [ * , cy = % £>* - a* i>z ^ ^ V <* = a»
ITI. i£ Valores importantes
by - a^ bjr
2 2 2 + c / + a f
?>
1 a l-l b | sen 9
b s '
0°; 360°
0
90°
♦I7HT|
> ^XT ->r^\ ? - v í>>180°... í360° _»
^
7 180°
0 Ejemplo: Momento M de una fuerza F It
respecto a un punto 0 : f
¿f = Radio vector x fuerza =~r*F=-(F r ) g
# = r F- sen 9 (J V | 0; r, f i 0) «
270°
-|t|-|7| ' Lí'nea ote acc/rfn
r t^~ pj

Funciones racionales Función de fracciones racionales. Descomposición Bi
n>m
Función de fracciones racionales ( i - p[xl = a<¡+ a, x + a¡x! + ... + a„x"
y ' Q(* ) b0 + 61 x + b2 x1 + . . . + b„ x" n y m enteros Los coeficientes av, ¿V pueden ser reales o complejos. Si n¡ son las raíces de O(x), se obtiene la forma factorizada:
y l x ; " QT7T a ( x - n , ) k ' - ( x - n , ) k 2 . . . (x - n,)1" En esta expresión pueden presentarse raices de multiplicidad Ar-i, /c2,... *q de Q(x), las que pueden ser reales o complejas; a es un factor constante.
Descomposición en fracciones parciales Para lograr un manejo más sencillo de y(x) -por ejemplo, para su integración-es conveniente descomponer y{x) en fracciones parciales: y ( x ) ^ p ( * ) - A" ■ A n ■ - A < " - ■
Q(x) x-n, (x -n , ) ' 1 *H , -^2? _
x-n¡ (x-n2)2
1 * ' , *«' x-n, ' (x-n, ) !
+ .
+ . . +
(x-n,)"' ^ 2 k !
(x-n2)« / q k q
(x-n,)"< Si los coeficientes de O(x) son reales, aparecen raíces complejas por parejas (raíces complejas conjugadas). Para efectuar la descomposición se agrupan estas parejas en fracciones parciales reales. Si en b'1, n2 = n, (compleja conjugada de n,,) y debido a su aparición por parejas k, = k2 = k, entonces las fracciones parciales de b'2 con las constantes A„... A^n pueden agruparse en las siguientes fracciones parciales:
flux + Cu Bu x + Cu BikX-t Clk
x1 + ax + b (x2+ax + b)2 ' " ( x ! + ax + b)k
Las constantes Au ... /*qkq, Bu... B,k y C , , . . . C,k se determinan igualando los coeficientes de igual potencia en x en ambos miembros de la ecuación, después de que en la parte derecha, descompuesta ésta en fracciones parciales, se toma el común denominador O(x). Ejemplo:
„ , , » . , 2 x - 1 _ 2 x - 1 _ flnX+Ci, , A,, A„ yK ;~(x+1-2 i ) (x+1+2i ) (x- f1) 2 "Q l7 )~x 2 +2x+5 x + 1 + ( 7 Í l F 2x-1 fl|,x(x+l)'+Cii(x+1)?+4l(x+1)(r'+2x+5)+42(x'+2x+5) QTxT QlTl 2x-1 = ( 4 , + B,,)x3 + ( 3 4 i + A„ + 2BU + C,,)x2 +
+ ( 7 4 . + 2^«+ fi„ + 2C,,)x + 5 4 , + 54,2 + C,i Al igualar los coeficientes de las partes izquierda y derecha se obtiene:
Bu = - 1 / 2 ; Cu = 1 A ; 4,i = 1/2; 4 ¡ = - 3 / 4 . Cuando se tienen raíces sencillas n,, las constantes An, A21, . . . , Aa, de la ecuación b'2 pueden calcularse como sigue:
4i = P(n,)/Q'(n,); -<„= P ( n , ) / Q ' ( a z ) ; . . . 4 = P(n,)/Q'(n,)
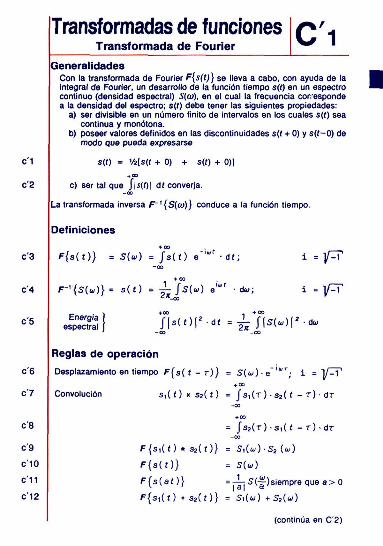
Transformadas de funciones Transformada de Fourier C'i
Generalidades Con la transformada de Fourler F{s(t)} se lleva a cabo, con ayuda de la Integral de Fourier, un desarrollo de la función tiempo s(í) en un espectro continuo (densidad espectral) S(io), en el cual la frecuencia corresponde a la densidad del espectro; s{t) debe tener las siguientes propiedades:
a) ser divisible en un número finito de intervalos en los cuales s(() sea continua y monótona.
b) poseer valores definidos en las discontinuidades s(í + 0) y s(í-0) de modo que pueda expresarse
s(t) - Vi[s(f + 0) + s(f) + 0)] -.00
c) ser tal que J[i(')l df converja.
La transformada inversa F~^{S(a))} conduce a la función tiempo.
Definiciones
F{s(t)} « S(«) - / " ( i ) e*" '" r-dí; i = l/^T - 0 0
F-1{S(«)} = »(t) = -¿zíSM »'" • <to; i = T/ T ¿*_oo
j +00 , + 0 0
•SSS) J l - í f í l ' - f -^J I í í - ) ! * - * Reglas de operación Desplazamiento en tiempo f { s ( f - r ) } = S(w) • e~'"T; i = V ^ T
+ 00
Convolución S i ( í ) * s 2 ( í ) ■ J s i ( r ) ■ s2( í - r ) • dr -00
+ 00
« / s 2 ( r ) - s i ( í -T)-ÓT - 00
F { s i ( í ) * s 2 ( t ) } = S,{u)-S2 M
F{s{t)} = S(u)
F(s(at)} = - ^5 ( ^s iempre que a> O | a | a
F { s , ( í ) + s 2 ( t ) } = Si(o-) +S 2 («) (continúa en C'2)
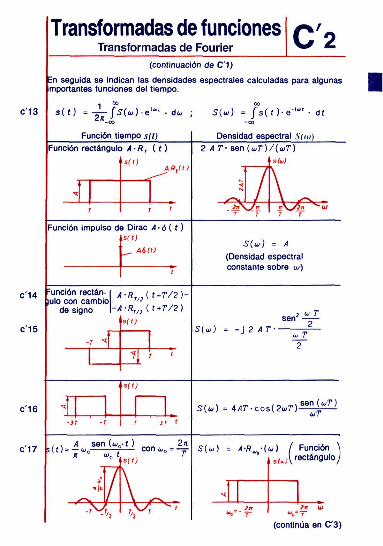
Transformadas de funciones Transformadas de Fourier C'2
c'13
(continuación de C'1)
En seguida se indican las densidades espectrales calculadas para algunas mportantes funciones del tiempo.
s ( í ) =-J-/S(<u)•e i"' , ■ iu ; S(u) * / s ( t )■ e""" • d( 2 * __
Función tiempo s(t) Densidad espectral Sim) Función rectángulo A ■ Rr ( t )
<
s(t)
1
ARj
t
2 AT- san(,u,T)/(uT) s M
Función impulso de Dirac A ■ ó ( í )
S(u) = A (Densidad espectral constante sobre w)
c'14
c'15
unción rectán-1 A.R ( t _ T / 2 ) . lulo con cambio T"
designo \-A-RT/1(t*T/2) 2 (U T
S(u) = - j 2 AT-- u, T 2
C'16 S(L>) = 4>ir-cos(2^r) sen (u,T)
, , A sen((D0- í) 2 * C 17 s ( í ) = — ix 0 7 — con Ü/„ = - = - S(u) = ¿ - R ^ - M / Función \
i s ( a J \ rectángulo)
-_ ¿n ?JT ti)
(continúa en C'3)
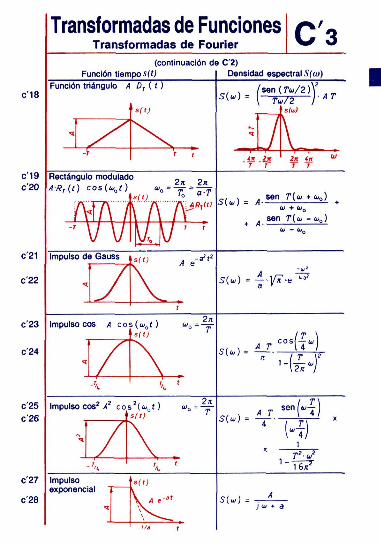
Transformadas de Funciones Transformadas de Fourier C'3
(continuación de C'2) Función tiempo s(t) Densidad^espectral S(w)
c'18
c'19 c'20
c'21
c'22
c'23
C'24
C'25 C'26
C'27
C'28
Impulso de Gauss » s , , , -3¡t'-A e
SM * --yit-e ta '
Impulso eos A cos (a / 0 t ) ÍK 2*
. - eos—w\ s^.LL [*-L T V
■(¿-) '/ '
Impulso eos2 A2 c o s ! ( u 0 í ) <K0 2JI
sftj SM' -r »K) 4 W) 16)T
Impulso exponencial s(t)
SM
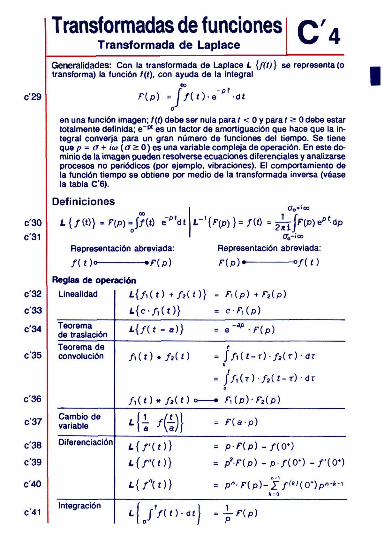
Transformadas de funciones Transformada de Laplace C'4
Generalidades: Con la transformada de Laplace L (f(t)} se representa (o transforma) la función f(t), con ayuda de la integral
F{p) = íf{t)-e''',-<¡t
en una función imagen; /(() debe ser nula para t < 0 y para u O debe estar totalmente definida; e'<* es un factor de amortiguación que hace que la integral converja para un gran número de funciones del tiempo. Se tiene que p = cr + / íu(a>0)es una variable compleja de operación. En este dominio de la imagen pueden resolverse ecuaciones diferenciales y analizarse procesos no periódicos (por ejemplo, vibraciones). El comportamiento de la función tiempo se obtiene por medio de la transformada inversa (véase la tabla C'6).
Definiciones
¿ {/(«)} »r(p)=J/(t) e-flfdí
Representación abreviada: / ( < ) ' »F(p)
Representación abreviada: F(p)* » / («)
Reglas de operación Linealidad L{Mt) *Mt)) = M P ) *FAP)
L{c ■/,(«)} = c - f , ( p ) Teorema de traslación ! { / (« -«)} = e-'pF(p) Teorema de convolución Mt)»Mt) « J/ i( í-T)-/ ,(r)-dT
= / / t ( T ) / , ( í - r ) - d T
Mt)*Mt) o—. F,(P)-FAP) Cambio de variable
Diferenciación 'ti f®} L{f{t)} ¿ { / " ( í ) }
L{At))
= F(ap)
= pF(p)-f(0-)
= p!-F(p) -pf(O') - / ' ( O * )
= p " - f ( p ) - I " ' / r t ' ( 0 * ) p " - ' ' - 1
Integración t { e / / ( t ) . d t j 'jF(p)
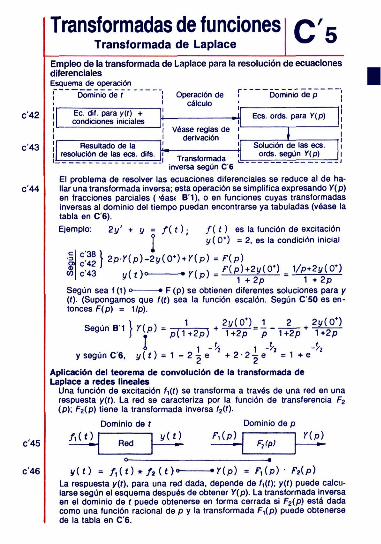
Transformadas de funciones Transformada de Laplace C'5
Empleo de la transformada de Laplace para la resolución de ecuaciones diferenciales Esquema de operación
Dominio de í
Ec. dtf. para y(í) + condiciones iniciales
Resultado de la resolución de las ees. difs.
¡ Operación de • 1 cálculo ¡
i véase reglas de ■ < derivación i
Transformada !
Dominio de p
Ees. ords. para V(p)
l Solución de las ees.
ords. según Y(p)
•
inversa según C'6 El problema de resolver las ecuaciones diferenciales se reduce al de hallar una transformada inversa; esta operación se simplifica expresando Y{ p) en fracciones parciales (>éas< B'1), o en funciones cuyas transformadas inversas al dominio del tiempo puedan encontrarse ya tabuladas (véase la tabla en C'6). Ejemplo: 2y'
c'38 c'42 c'43
i / ( * ) ; / ( t ) es la función de excitación V(0*) = 2, es la condición inicial
}2p-r(p)-2y(0*) + l'(p) = F(p) y ( í ) ° - r ( p ) = f(p)+2y(0*) _1/p+2y(0*)
Según sea f (t) o-1 +2p 1 +2p
> F (p) se obtienen diferentes soluciones para y ((). (Supongamos que f(t) sea la función escalón. Según C'50 es entonces F(p) = 1/p).
y según C'6, 1 - 2 ^ e " / 2 + 2 -2 - 1 +(
Aplicación del teorema de convolución de la transformada de Laplace a redes lineales
Una función de excitación f,(t) se transforma a través de una red en una respuesta /((). La red se caracteriza por la función de transferencia F¿ (P); F2(p) tiene la transformada inversa f2C).
Dominio de í Dominio de p MO Red
y ( í ) MP) F,(P)
Hp)
-»r(P) = f¡(p) ■ /-2(p) y ( t ) = / , ( « ) * / , ( t ) — La respuesta y(f), para una red dada, depende de f,(f); y(f) puede calcularse según el esquema después de obtener Y(p). La transformada inversa en el dominio de f puede obtenerse en forma cerrada si F2(p) está dada como una función racional de p y la transformada F,(p) puede obtenerse de la tabla en C'6.
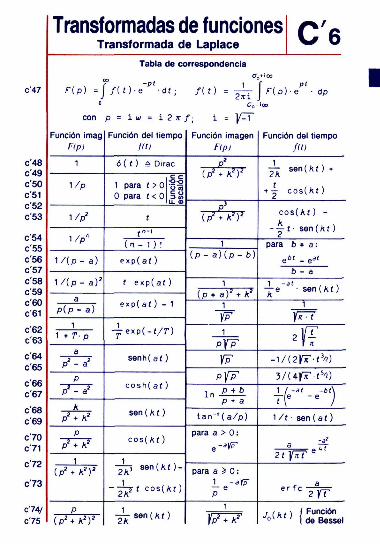
Transformadas de funciones Transformada de Laplace
F(p) = 0
con
Función imag F(p)
1
^/p
1/P2
i / p "
1 / ( p - a )
1 / ( p - a ) 2
P<,P - a)
1 1 +7 - -P
a p!-a>
P P*-a>
k P + rt
P p 2 * * 2
1 (p'+k2)*
P ( p 2 - * 2 ) 2
Tabla de ce
f -pt / ( O - e - d i ;
p = i a = i 2 ir
Función del tiempo flt)
ó ( í ) s, Dirac
1 para í > 0 0 para í < 0 1
t
¡o-,
( i - D !
e x p ( a í )
f e x p ( a í )
e x p ( a t ) - 1
-jexp(-t/T)
s e n h ( a ( )
c o s h ( a í )
sen (kt)
cos(kt)
—J sen(kt)-
■j^ s e n ( A t )
rrespondencia c
r¡ i = yrr Función imagen
Flp)
P'
( p J + X 2 ) 2
P3
<p ! + A 2 ) 2
1 ( p - a ) ( p - b )
1 ( p + a ) 2 + A2
1
1 PV7 VP
p f p 1
l n " + i )
p + a
t a n " ' (a/p)
para a > 0 :
para a í 0 : 1 - ¿ Í P " — e P
1
^ ♦ A2'
Ce + ÍOO
I F ( p ) e • dp
Función del tiempo flt)
— s e n ( k t ) +
+ j c o s U í )
c o s ( A í ) -
- y í sen (kt)
para 6 * a :
e " -eél
b - a
—e ■ sen ( A ( )
1
'}T , - 1 / ( 2 V F - t ^ )
3 / U y F t5 ' ,)
1 / -a i -bt\ T ( e - e j
1 / í • sen ( a i )
- %—i e 1 7
2 í ^ í
e r f e ^
i í ir»1 / Función J » " " (deBesse l
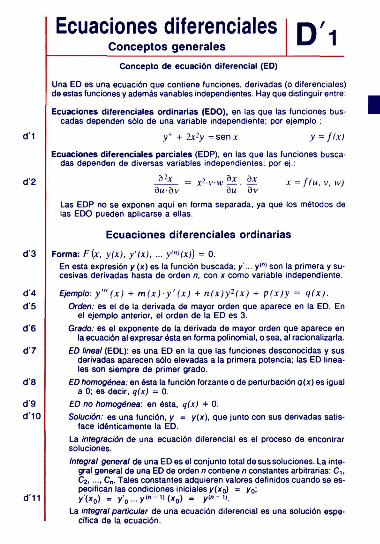
Ecuaciones diferenciales Conceptos generales Di
Concepto de ecuación diferencial (ED)
Una ED es una ecuación que contiene funciones, derivadas (o diferenciales) de estas funciones y además variables independientes. Hay que distinguir entre:
Ecuaciones diferenciales ordinarias (EDO), en las que las funciones buscadas dependen sólo de una variable independiente; por ejemplo :
y" + 2x2y = sen .v y = f(x) Ecuaciones diferenciales parciales (EDP). en las que las funciones busca
das dependen de diversas variables independientes; por ej.: a 2* = xl-vw 5 i . ¿2 x =f(u, v, w)
du-dv ou 8v Las EDP no se exponen aquí en forma separada, ya que los métodos de las EDO pueden aplicarse a ellas.
Ecuaciones diferenciales ordinarias
Forma: F(x, y(x), y'(x), ... y<">(X)) = 0. En esta expresión y (x) es la función buscada; y... y<") son la primera y sucesivas derivadas hasta de orden n, con x como variable independiente.
Ejemplo: y'"(x) + mfx)-y'(x) + n(x)y2(x) + p(x)y = q(x). Orden: es el de la derivada de mayor orden que aparece en la ED. En
el ejemplo anterior, el orden de la ED es 3. Grado: es el exponente de la derivada de mayor orden que aparece en
la ecuación al expresar ésta en forma polinomial, o sea, al racionalizarla. ED lineal (EDL): es una ED en la que las funciones desconocidas y sus
derivadas aparecen sólo elevadas a la primera potencia; las ED lineales son siempre de primer grado.
EDhomogénea: en ésta la función forzante o de perturbación q(x) es igual a 0; es decir, q(x) = 0.
ED no homogénea: en ésta, q(x) * 0. Solución: es una función, y = y(x), que junto con sus derivadas satis
face idénticamente la ED. La integración de una ecuación diferencial es el proceso de encontrar soluciones. Integral general de una ED es el conjunto total de sus soluciones. La inte
gral general de una ED de orden n contiene n constantes arbitrarias: C,, C2,..., C„. Tales constantes adquieren valores definidos cuando se especifican las condiciones iniciales y(x0) m y0; y'(*o> = / o - v ( " " " ( x o ) - y'"""-
La integral particular de una ecuación diferencial es una solución específica de la ecuación.
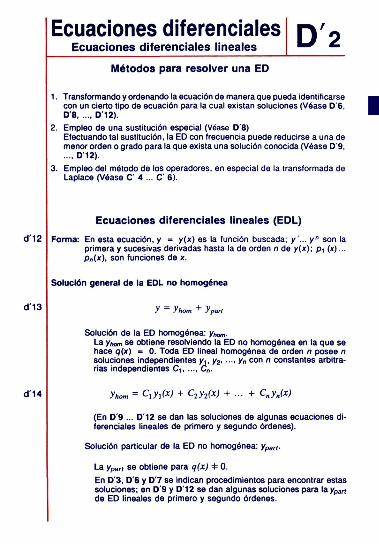
Ecuaciones diferenciales Ecuaciones diferenciales lineales D'2
Métodos para resolver una ED
1. Transformando y ordenando la ecuación de manera que pueda identificarse con un cierto tipo de ecuación para la cual existan soluciones (Véase D 6, D'8 D'12).
2. Empleo de una sustitución especial (Véase D'8) Efectuando tal sustitución, la ED con frecuencia puede reducirse a una de menor orden o grado para la que exista una solución conocida (Véase D'9, ..., D'12).
3. Empleo del método de los operadores, en especial de la transformada de Laplace (Véase C 4 ... C 6).
Ecuaciones diferenciales lineales (EDL) Forma: En esta ecuación, y = y(x) es la función buscada; y'... y" son la
primera y sucesivas derivadas hasta la de orden n de y(x); p, (x)... p„(x), son funciones de x.
Solución general de la EDL no homogénea
/ Jhom ' Jpan
Solución de la ED homogénea: yhom. La yhom se obtiene resolviendo la ED no homogénea en la que se hace Q(X) ■= 0. Toda ED lineal homogénea de orden n posee n soluciones independientes y,, y? y„ con n constantes arbitrarias independientes C, C„.
yhom = C,y,W + C2y2(x) + ... + Cny„(x)
(En D'9 ... D'12 se dan las soluciones de algunas ecuaciones diferenciales lineales de primero y segundo órdenes).
Solución particular de la ED no homogénea: yaart.
La yp¡,rt se obtiene para q(x) * 0. En D'3, D'6 y D'7 se indican procedimientos para encontrar estas soluciones: en D'9 y D 12 se dan algunas soluciones para laypart de ED lineales de primero y segundo órdenes.
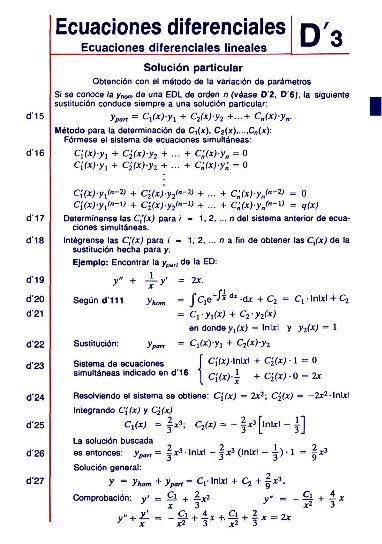
Ecuaciones diferenciales Ecuaciones diferenciales lineales D'3
Solución particular Obtención con el método de la variación de parámetros
Si se conoce la yhom de una EOL de orden n (véase D'2, D'6). la siguiente sustitución conduce siempre a una solución particular:
yPart = CiMyi + C2(x)-y2 +...+ C„(x)-y„. Método para la determinación de C,(x), C?(x) C„(x):
Fórmese el sistema de ecuaciones simultáneas: C{(x)yt + Ci(x)y2 + ... + C'(x)-y„ = 0 C{(x)-yx + Ci(x)-y2 + ... + C'(x)-y' = 0
Ci(x)-yi<»-V + Cí(x)y2<"-V + ... + C¿(X)yn(-V = 0 C ¡ W 7 t ' " ' u + Ci(x)-y20-V + ... + C¿(x)y„("-Ü = ? W
Determínense las C¡'W para / - 1, 2,... n del sistema anterior de ecuaciones simultáneas.
Intégrense las C¡(x) para ;' = 1,2, . . .na fin de obtener las Q(x) de la sustitución hecha para y. Ejemplo: Encontrar la ypsrt de la ED:
y" + T ' 1 * 2 x -Según d'111 > w , = fCfi'ft "' dx + C2 - C, • Inlxl + C2
- C,-jr,W + C2 -y2W en donde >>](» = InLvl y y2(>J = 1
Sustitución: yran = C1(x)yi + C¡(i)-y2
Sistema de ecuaciones J C[(x)\x\\x\ + C2(x) 1 = 0 simultáneas indicado en d'16 j Q>M.I. + C'(*)•() = 2x
Resolviendo el sistema se obtiene: C{(x) = 2x2; C2(x) = —2x2• Inlrl Integrando C{(x) y C2(x)
Ct(x) = | x » ; C,W = - | * 3 [inW - I ]
La solución buscada es entonces: >>,„„ = ^A:3 • Inurl - j jc3 (Inltl - ^ ) • 1 = ¡ j * 3
Solución general: y = yhom + y,»* = <V inw + c 2 + | * 3 .
Comprobación: y' = í i + . i . * 2 y" = - Q. + — x x 3 JC2 3
' x Jt2 3 *2 3
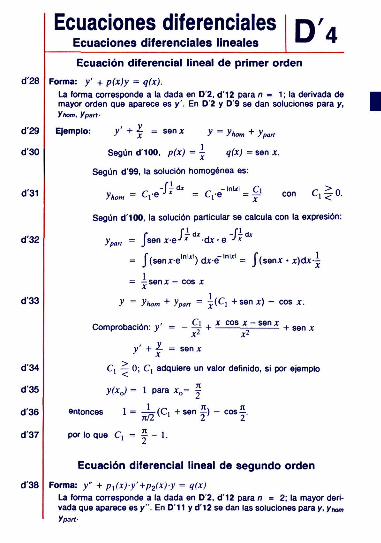
Ecuaciones diferenciales Ecuaciones diferenciales lineales D'4 Ecuación diferencial lineal de primer orden
Forma: y' + p(x)y = g(x). La forma corresponde a la dada en D'2, d'12 para n « 1; la derivada de mayor orden que aparece es y'. En D'2 y D'9 se dan soluciones para y, Yhom, Ypart-
Ejemplo: y' + \ = señar y = yhom + ypm
Según d'100, p(x) = - q(x) = sen x.
Según d'99, la solución homogénea es:
ykom = C^}" = C,-e - £ ! con C , < 0 .
Según d'100, la solución particular se calcula con la expresión:
í1"*, -P-J x .fir • p ■* *
dx y^on = J s e n x e J * d x e -1*
= J"(senxelnlj:l) d ; ^ " " " = J(senx . x)dx- I
= x !
y = ^om + y pan = ¿(Ci +sen x) - eos x.
Comprobación: y' = - £ + * « » « - « " * + s e n * X 2 X2
y' + J- = sen x ' x
Q — 0; C, adquiere un valor definido, si por ejemplo
y(xj = 1 para x0= |
entonces 1 = -W(C¡ +sen y) - cos^.
por lo que C, = 5 - 1.
Ecuación diferencial lineal de segundo orden Forma: y" + p,(x)-y'+p2(x)-y = q(x)
La forma corresponde a la dada en D'2, d 12 para n = 2; la mayor derivada que aparece es y ". En D 11 y d 12 se dan las soluciones para y, y wn Ypart-
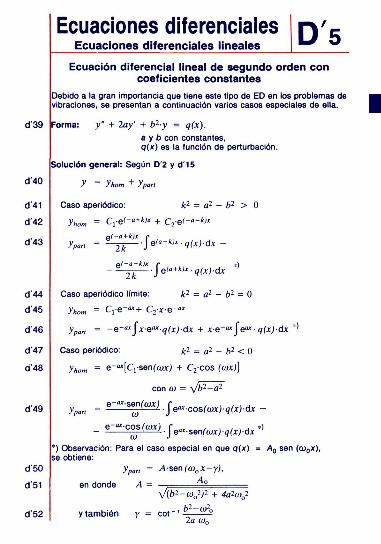
Ecuaciones diferenciales Ecuaciones diferenciales lineales D'5
d'39
d'40
d'41
d'42
d'43
d'44 d'45
d'46
d'47
d'48
d'49
d'50
d'51
d'52
Ecuación diferencial lineal de segundo orden con coeficientes constantes
Debido a la gran importancia que tiene este tipo de ED en los problemas de vibraciones, se presentan a continuación varios casos especiales de ella.
Forma: y" + lay' + b2-y = q(x). a y b con constantes, q(x) es la función de perturbación.
Solución general: Según D 2 y d'15
y = yhom + y par,
Caso aperiódico: k2 = a2 - b2 > 0
af-a+k)x f-ypart = —Jk )^a-k>x-q(x)-ÓX ~
c.(-a-k)x c *\ ~^~2j }e"*i"'-q(x)-dx
Caso aperiódico límite: k2 = a2 - b2 = 0 yhom = Cye-<*+ C2x-e-"
y pan = -e~w,§xea*q(x)óx + xea*jeaxq(x)<3x *'
Caso periódico: k2 = a2 - b2 < 0
y>¡om = ^"[Ci-senfcox) + C2cos (ojx)]
con co = \fb2-a2
yPar, = e""s^(<0X> $&*cos(wx)q(x)áx -
- g ^ g g ^ . J V - s e n f a a H W - c U * '
*) Observación: Para el caso especial en que q(x) = ¿0 sen (a)0x), se obtiene:
y pan = Aset\(co0x-y), en donde -1 - — ^ —
V C 2 - » , , ^ + 4a2ft,o2
y también y = c o r ' 4 — — 2a w0
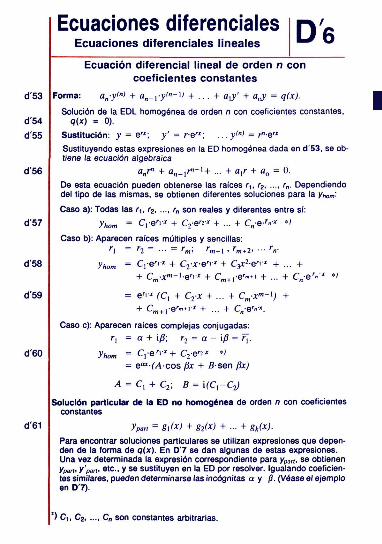
Ecuaciones diferenciales Ecuaciones diferenciales lineales D'6
Ecuación diferencial lineal de orden n con coeficientes constantes
Forma: a„-y<"> + a„_t-y<"-,> + . . . + a¡y' + ají = q(x).
Solución de la EDL homogénea de orden n con coeficientes constantes, q(x) = 0).
Sustitución: y = e" ; y' = r e " ; ... y<"> = r " e " Sustituyendo estas expresiones en la ED homogénea dada en d'53, se obtiene la ecuación algebraica
a„r" + a„_1r"-i+ ... + axr + aa = 0. De esta ecuación pueden obtenerse las raíces r,, r2 r„. Dependiendo del tipo de las mismas, se obtienen diferentes soluciones para la yhom. Caso a): Todas las r,, r2 r„ son reales y diferentes entre si:
yhom = C,-eT» + C2<¡r¡" + ... + C„-e-v* *J Caso b): Aparecen raices múltiples y sencillas:
r¡ = r2 = ... = rm; rm+i, rmt2, ■■■ rn-
yhom = C¡-e'y' + C2-x-e"-' + C]X2e'<x + ... + + Cm-A:"-i-en- + Cm+1-er~i + ... + C „ e ' » ' *J
= e'i* fC, + Cy* + ... + Cm-xm~l) + + Cm+1-e/»*"* + ... + C„-e'««.
Caso c): Aparecen raíces complejas conjugadas: r, = a + i/3; r2 = a - i/3 = T¡.
yhom = C , - e i * + C2-e^ ' *> = e<" -(VI- eos /3A: + Asen (8^
A = c, + c2; B = ¡(r,-cy Solución particular de la ED no homogénea de orden n con coeficientes
constantes
y pan = g¡(x) + g2(x) + ... + gk(x). Para encontrar soluciones particulares se utilizan expresiones que dependen de la forma de q(x). En D 7 se dan algunas de estas expresiones. Una vez determinada la expresión correspondiente para ypaf(, se obtienen yPart. Y'pan. etc., y se sustituyen en la ED por resolver. Igualando coeficientes similares, pueden determinarse las incógnitas a y (3. (Véase el ejemplo en D'7).
) C,, Cz C„ son constantes arbitrarias.
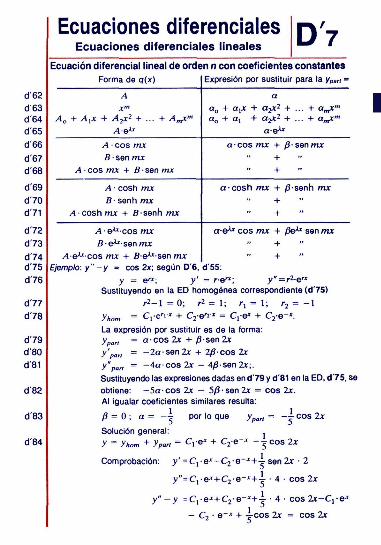
Ecuaciones diferenciales Ecuaciones diferenciales lineales D'7
Ecuación diferencial lineal de orden n con coeficientes constantes Forma de q(x)
A xm
A0 + A¡x + A2X2 + •■■ + A„xm
Ae** A • eos mx B ■ sen mx
A • eos mx + B ■ sen mx
A • cosh mx B- senh mx
Acoshmx + B senil mx
/ l e n c o s mx Be**senmx
/ l e n c o s mx + fle^sen mx
Expresión por sustituir para la ypan =
a a0 + a¡x + a-^c2 + ... + a„xm
a„ + a, + a^x2 + ... + a„xm
a-cos mx + B-senmx + +
a cosh mx + ¿i-sentí mx + +
ae** eos mx + Be** sen mx + +
Ejemplo, y" - y = eos 2x; según D'6, d'55: y = e " ; y' = r e " ; y"=r2-e"
Sustituyendo en la ED homogénea correspondiente (d'75) r2-\ = 0; r2 = 1; r, = 1; r2 = - 1
yh„m = C.e'r* + Cj-e-í» = C,-e* + C2e-*. La expresión por sustituir es de la forma: ypa„ = a-cos 2x + /3-senZx /pon = -2a-sen2x + 2flcos 2x y" pan = - 4 a c o s 2x - 4fisen 2x;. Sustituyendo las expresiones dadas en d'79 y d'81 en la ED, d'75,5 obtiene: - 5 a c o s Ix — 5/3- sen 2x = eos 2x. Al igualar coeficientes similares resulta:
1 0 ; a = - por lo que - eos 2x
eos 2x Solución general: y - ynom + yPan = <Ve* + C2-e-*
Comprobación: y' = C¡ex-C2-e~x+-^sen2x ■ 2
y"=C¡e'+C2e-"+^ ■ 4 • eos 2x
y"-y =C,e*+C2-e- 4 ■ cosl r -CVe* C2 • e~x + -,-cos 2x = eos 2x
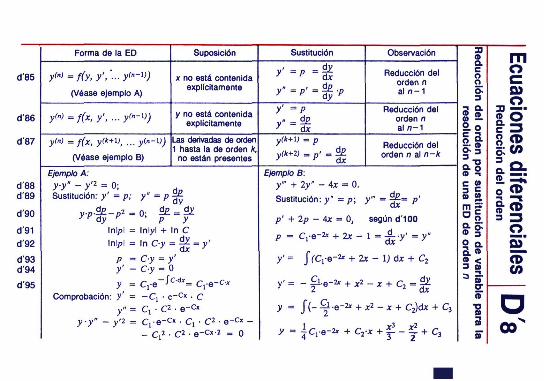
J'85
1'86
J'87
i'88 i'89
i'90
i'91 i'92
i'93 i'94
J'95
Forma de la ED
yM = f(y, y', ... yt"-V)
(Véase ejemplo A)
yCO-Hx, y', ...yC-»)
yM = f(x, y(*+U, ... y(n-V)
(Véase ejemplo B)
Suposición
x no está contenida explícitamente
y no está contenida explícitamente
Las derivadas de orden 1 hasta la de orden k,
no están presentes Ejemplo A: y . y » - y ' 2 = 0; Sustitución: >' = p; >> = p -F-
y.p.%L-p2 = 0; & = & ' y dy y P y Inlpl = Inlyl + In C Inlpl = In Cy = & = y'
p = cy = y' y1 - Cy - 0 y = C V a " ' 0 ' * - q - e - C '
Comprobación: y' = - C j ■ e- c* • C y» = Ci ■ C2 • e-Cx
yy" - y'2 = C-e-Cx . C j . C 2 . e -Cx -
- C;2 ■ C 2 • e - c * 2 = 0
Sustitución
dp y -P - $ - P
y' =p y dx y(k+l) = p
y(k+2, - p' - ¡ j |
Observación
Reducción del orden n a l n - 1
Reducción del orden n a ln -1
Reducción del orden n al n-k
Ejemplo B: y'" + 2y" - 4x = 0. Sustitución: y" = p; y'" = -j2= p'
p' + 2p - 4A; = 0, según d'100
P = c-o-^ + to-i-^y-y"
y' = JcQ-e-2» + 2x - i ; dJt + C2
y - - fi-e-2* + *2 - x + c2 = ^
y = J(- ^-e-2 1 + A:2 - x + Cjdx + C}
y - jq-e-2* + C2-A: + | i - ¿ + c3
3J a o. c 0 0
a 3
8 2. « o
I! *í %l § c 5 % m 3 • 3 2 o. 3.» 2 < 3 a => 5-m
o -
a "S 3 a
m .cuacion Redu es diferenciales
cción del orden
09"
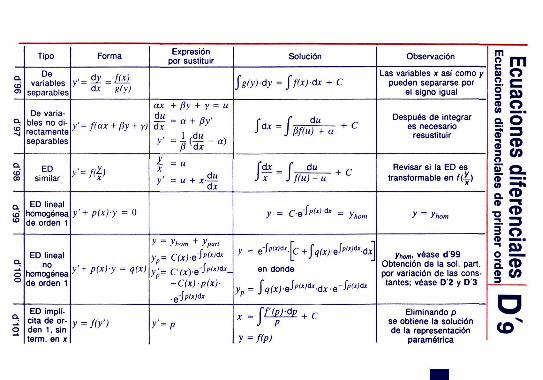
Q . CD O)
Q . CD v i
Q. CO 00
O. ID CD
Q .
O O
O
Tipo
De variables
separables
De variables no directamente separables
ED similar
ED lineal homogénea de orden 1
ED lineal no
homogénea de orden 1
ED implícita de orden 1, sin term. en x
Forma
y ¿x g(y)
y'=f(ax + Py + Y)
y 4)
y'+ pfxjy = 0
y'+ p(x)y = q(x)
y = f(y')
Expresión por sustituir
ax + fly + y = u
y-u + xfx
7 ~ shom Jpan
yp= C W ' e ' í " * yp= C(x)eS >»»**-
-C(x)p(x)-
y'-p
Solución
jg<y)-dy = ff(x)dx + C
Sdx=¡i3f(u) + a +C
\úx ~ L ?" + c J x J f(u) - u
y = c-ei'"*-*' = yhom
y = e-/pwdxjc +J9W .e /pW*'.<uJ
en donde
xm¡£MÉE+c
y = fíp)
Observación
Las variables x así como y pueden separarse por
el signo igual
Después de integrar es necesario
resustituir
Revisar si la ED es transformable en f(Y)
y yhom
yftom, véase d'99 Obtención de la sol. pan. por variación de las constantes; véase D'2 y D'3
Eliminando p se obtiene la solución de la representación
paramétrica
Ecua Ecuación ciones diferenciales
es diferenciales de primer orden
«o*
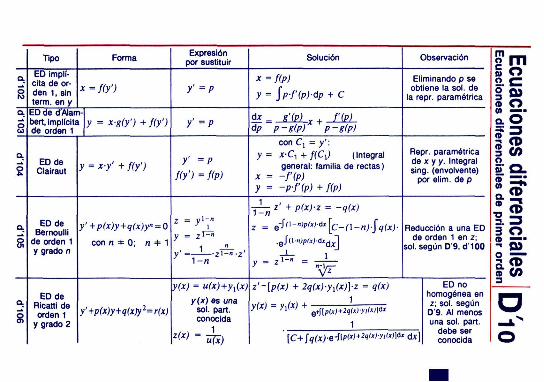
Q.
O
Q.
O U
O.
2
O.
1
O.
O 0>
Tipo
ED implícita de orden 1, sin term. en y
ED de d'Alan bert, Implícita de orden 1
EDde Clairaut
EDde Bernoulli
de orden 1 y grado n
EDde Ricatti de orden 1
y grado 2
Forma
x = f(y')
i-y = x-g(y') + f(y')
y = x-y' + f(y')
y'+p(x)y+q(x)y» = 0
con n =t= 0; n * 1
y'+p(x)y+q(x)y2=r(x)
Expresión por sustituir
y' =p
y' =p
y' =p
f(y') = m
z = y1-"
y = zT^" 1 — ,
y(x) = « W + í i W y(x) es una
sol. part. conocida z(x> = i)
Solución
* = f(p)
y = jp-r(p)-np + c
d* Í ' W , , f iw dp p-g(p) p-g(p)
con C¡ = y': y = x-Ci + f(Cx) (Integral
general: familia de rectas) x = -Í(P) y = -p-f(p) + /IPJ
j ^ z ' +p(x)-z = -q(x)
2 = e-S<i-»>PMO*[c-(l-n)$q(x)-
1 ,
Observación
Eliminando p se obtiene la sol. de
la repr. paramétrica
Repr. paramétrica de x y y. Integral sing. (envolvente)
por elim. de p
Reducción a una ED de orden 1 en z;
sol. según D 9, d 100
>W >\W e»|[pW+2,W7l(x)l« 1
[C+/9W-e-í l / 'W+ 2 ' 'w^' ' " l0* dx]
ED no homogénea en z; sol. según D'9. Al menos una sol. pan.
debe ser conocida
?$}
18 iones diferenciales s diferenciales de prim
er orde
3
o
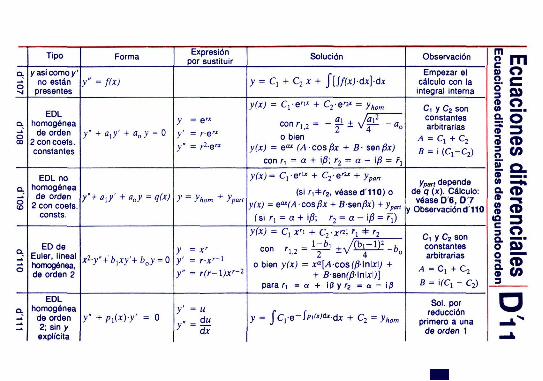
Q.
O
Q.
O 00
O
Q.
O
O.
Tipo
y asi como y' no están presentes
EDL homogénea de orden
2 con coefs. constantes
EDL no homogénea de orden
2 con coefs. consts.
EDde Euler, lineal homogénea, de orden 2
EDL homogénea de orden 2; sin y explícita
Forma
y" = ÍM
y- + aty' + aoy = 0
y"+ « i / + «ay = iM
xi-y-+b1xy'+boy = 0
y" + p¡(x)-y' = o
Expresión por sustituir
y = e'* y' = re" y" = r2-e"
y ~ yhom y pan
y =x' y' = r-x'-x
y" = r(r-\)x'~2
y1 = u
y áx
Solución
y = C, + C2 x + j[Sf(x)áx]-dx
y(x) = C1-W+ C2-en* = yhom
c o n r y - - f l ± V ^ -«o o bien
y(x) = e"" (A-cosBx + B- sen/jUr) con r, = a + \B; r2 = a - iB = fí
y(x)= C,-e"»+ C j - e * + >-,,,„
(si f t+r j , véase d'110) o yW = e"(A-COSPx + B-senBx) + yp0„
(si r, = a + i/?; r2 = a - i/8 = r¡¡) J-W = C ,^ i + Cyxn> 'i * r2
con r u = l - * < ± v / í ! ^ - 6 o
o bien >W = xa[>4-cos(S-lnlílJ + + B-senC/S-Inlxl,)]
para r, = a + i (i y r2 = a - ¡3
y = J*C,e-J>iWd«-cU + C2 = yhom
Observación Empezar el
cálculo con la integral interna
Ct y C2 son constantes arbitrarias
A = C¡ + Cj B = i {C¡-C2)
yPwt depende de q (x). Cálculo: véase D'6, D'7
y Observación d'110
C, y C2 son constantes arbitrarias
A = Cj + C2
B = ¡(Ti - C2)
Sol. por reducción
primero a una de orden 1
¡? m § Q> ciones diferenciales
es diferenciales de segundo orden
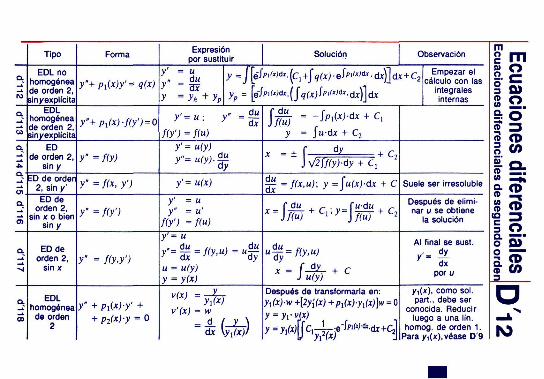
o.
ío
o.
o.
Q.
O)
Q .
Q.
00
Tipo
EDLno homogénea de orden 2, sin/explícita
EDL homogénea de orden 2, sin/explícita
ED de orden 2,
sin y ED de orden
2, sin y' EDde
orden 2, sin x o bien
sin y
EDde orden 2,
sin x
EDL homogénea de orden
2
Forma
y"+ Pi(*)y' = i(x)
y"+pl(x)-fíy')=0
y" = f(y)
y" = fíx, y')
y" = f(y')
y" = /¡fy.y.)
y" + PiW-y' +
Expresión por sustituir
y' = u
Solución Observación
y=j [e/piw^.(c, +JV*; • e^'W* ■ cu)] dx+C2
yp = [éfww».(/íw/'"wdr-djc)](to
d* f(y') = /W
y' = «W
y'= «W
y' = u y" = u'
f(y') =f(u) / - U
. du -, , du
u = u(>; y = y(x)
vM=yfa v'(x) = w
d * \y^x)l
y = JVdx + C2
x - + I — J & + C2
J y/2¡fíy)-óy + C,
^ = /¡ftu); y = JuW-dx + C
' -Jj&^'-íaS^
Después de transformarla en: y-, (x)-w +[2y{(x) +p1(x)y¡(x)]w = 0 y = yyvM
Empezar el cálculo con las
integrales internas
Suele ser irresoluble
Después de eliminar u se obtiene
la solución
Al final se sust.
dx por u
y,(x), como sol. part., debe ser
conocida. Reducir luego a una lin.
homog. de orden 1. Para yi(x), véase D'9
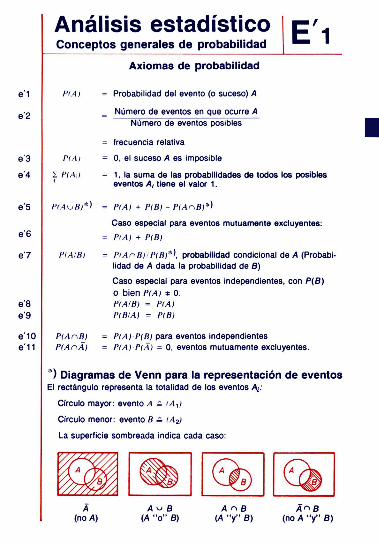
Análisis estadístico Conceptos generales de probabilidad E'i
Axiomas de probabilidad
l'IAl
I') AI
2 I'IAJ
P(AKJB)*)
l'(Alfí)
PtAnBJ P(AnA)
= Probabilidad del evento (o suceso) A
Número de eventos en que ocurre A Número de eventos posibles
= frecuencia relativa
= 0, el suceso A es imposible
= 1, la suma de las probabilidades de todos los posibles eventos A¡ tiene el valor 1.
= P(A) + P(B) - PIAnBI*)
Caso especial para eventos mutuamente excluyentes: = P(A) + P(B)
= PtAnB) P(B)*\ probabilidad condicional de A (Probabilidad de A dada la probabilidad de S) Caso especial para eventos independientes, con P(ü) o bien PfA) * 0: PiAIB) = P(A) P(BIA) = P(B)
= PIA) P(fí) para eventos independientes = P(A) P(Á) = 0. eventos mutuamente excluyentes.
*) Diagramas de Venn para la representación de eventos El rectángulo representa la totalidad de los eventos A¡:
Círculo mayor: evento A & (A,)
Circulo menor: evento 8 £, <A¡)
La superficie sombreada indica cada caso:
I. WA ü> Q$ Gfr A u B
(A "o" B) A^B
(A "y" B) A"B
(no A "y" B)
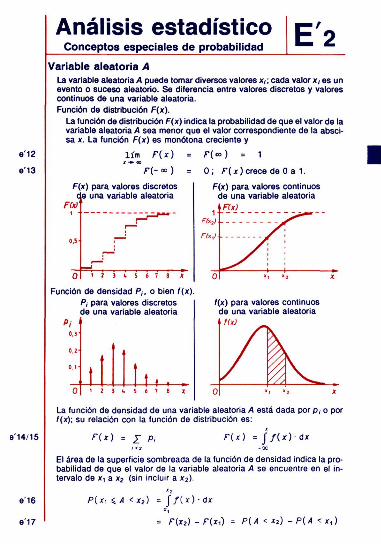
Análisis estadístico Conceptos especiales de probabilidad E'2
Variable aleatoria A La variable aleatoria A puede tomar diversos valores x,; cada valor x, es un evento o suceso aleatorio. Se diferencia entre valores discretos y valores continuos de una variable aleatoria. Función de distribución F(x).
La función de distribución F(x) indica la probabilidad de que el valor de la variable aleatoria A sea menor que el valor correspondiente de la abscisa x. La función F(x) es monótona creciente y
lím F(x) = F(oo) «= 1 f ( - ° ° )
F(x) para valores discretos de una variable aleatoria
Ftx)
~~¡ i t 5 í~~7 8 X
Función de densidad P¡, o bien f(x) P¡ para valores discretos de una variable aleatoria
0 ; /"(x)crece de 0 a 1.
F(x) para valores continuos de una variable aleatoria
i 0,3
0.2-
0,1-
0 X
.
i it,. S 6 7 8 X
f(x) para valores continuos de una variable aleatoria
flx!
La función de densidad de una variable aleatoria A está dada por p, o por f(x); su relación con la función de distribución es:
r(x) = x p, /"(*) = J / ( x ) dx
El área de la superficie sombreada de la función de densidad indica la probabilidad de que el valor de la variable aleatoria A se encuentre en el intervalo de xt a x2 (sin incluir a x2)
P(x, $A <x¡) = J / ( x ) - d x «i
= í"(x2) - r(x,) = P{ A < x2) - P( A < x,)
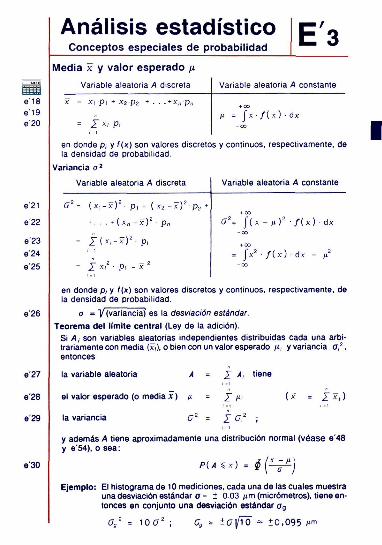
Análisis estadístico Conceptos especiales de probabilidad E'3
Media x y valor esperado ¡i Variable aleatoria A discreta Variable aleatoria A constante
x - xi-pi + x 2 p 2
= I x¡ p,
*x„p„ ix = f x / ( x ) ■ dx
00
en donde p, y f(x) son valores discretos y continuos, respectivamente, de la densidad de probabilidad.
Variancia a2
Variable aleatoria A discreta
ff2= ( x , - x ) 2 . p 1 + ( x 2 - x ) 2
♦ . . , + ( x „ - x - ) 2 p „
= X ( x , - x ) 2 . p,
= I x f2 ■ p, - x 2
p2 +
Variable aleatoria A constante
+ CO
a2= J ( x - ^ ) 2 / ( x ) d x
+00 = Jx 2 • f(x) ■ dx - Í<2
-a>
en donde p, y f (x) son valores discretos y continuos, respectivamente, de la densidad de probabilidad.
a m V (variancia) es la desviación estándar. Teorema del límite central (Ley de la adición).
Si A, son variables aleatorias independientes distribuidas cada una arbitrariamente con media (x¡), o bien con un valor esperado /¿¡ y variancia a,2. entonces
la variable aleatoria A
el valor esperado (o media x ) p
la variancia c 2
¿" A¡ tiene
Í" 11, (x = f x¡,)
í^2 ; y además A tiene aproximadamente una distribución normal (véase e'48 y e'54), o sea:
PlAíx) = § fe*) ina de las cu: n (micrómetri tándar o¡,
0 / = 1 0 a 2 ; Cg = ±0]¡To " Í0.095 fm
Ejemplo: El histograma de 10 mediciones, cada una de las cuales muestra una desviación estándar a = ± 0.03 /im (micrómetros), tiene entonces en conjunto una desviación estándar og
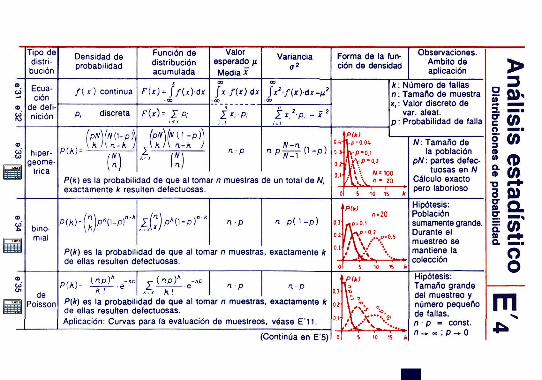
Tipo de distribución
Densidad de probabilidad
Función de distribución acumulada
Valor esperado ¡Í Media x
Variancia Forma de la función de densidad
Observaciones. Ámbito de aplicación
Ecuación
de defi nición
/ ( x ) continua fO)*J7(x)-dx
p, discreta r(x)= ZP:
Jx / (x )d r
¿x,.p,
jV-/(x)-dx-,/
I ' ; - P , - x
hiper-geomé-
trica
PM--pN)llW-p) A An-A
/pffWyv(i-pA - U / \ n-A y
* : Número de fallas n: Tamaño de muestra x¡: Valor discreto de
var. aleat. p : Probabilidad de falla
(') PO) es la probabilidad de que al tomar n muestras de un total de N, exactamente * resulten defectuosas.
N: Tamaño de la población
pN: partes defectuosas en N
Cálculo exacto pero laborioso
bino-mial
P(A) = np*0-P) Ir(?)p*0-P)" i p ( l - p )
P(k) es la probabilidad de que al tomar n muestras, exactamente k de ellas resulten defectuosas.
Hipótesis: Población sumamente grande. Durante el muestreo se mantiene la colección
P(A) = (np)* de
Poisson
■ (np)K
n p np P(k) es la probabilidad de que al tomar n muestras, exactamente k de ellas resulten defectuosas. Aplicación: Curvas para la evaluación de muéstreos, véase E'11.
(Continúa en E'5)
Hipótesis: Tamaño grande del muestreo y número pequeño de fallas, n ■ p = const. n -. ,*> ; p — O
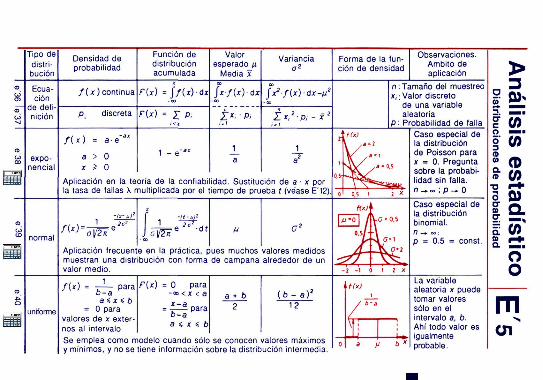
Tipo de distribución
Densidad de probabilidad
Función de distribución acumulada
Valor esperado tí
Media x
Forma de la función de densidad
Observaciones. Ámbito de aplicación
Ecuación
■ de defi nición
/ ( x ) continua fU) ' ¡f(x)úx Jx/(x)dx JV-/(x)-d*V
f(x) = Z P: £*; ■ P, Zxi'-p;-g
n: Tamaño del muestreo x,;Valor discreto
de una variable aleatoria
P: Probabilidad de falla
exponencial
f(x) = ae'
a > 0 x i 0
Aplicación en la teoría de ia confiabilidad. Sustitución de a ■ x por la tasa de fallas X multiplicada por el tiempo de prueba í (véase E'12).
Caso especial de la distribución de Poisson para x = 0. Pregunta sobre la probabilidad sin falla. n —oo; p _* o
f^-w^ ofSJ Aplicación frecuente en la práctica, pues muchos valores medidos muestran una distribución con forma de campana alrededor de un valor medio.
Caso especial de la distribución binomial. n -» oo; p = 0.5 = const.
1 o 1 i x
/ ( x ) = 1 b-a
para aix ( b
= 0 para valores de x externos al intervalo
P{x) = 0 para - » <x < a x -
a t x ( b ■ para
a + b {b-a)1
12
Se emplea como modelo cuando sólo se conocen valores máximos y mínimos, y no se tiene información sobre la distribución intermedia.
La variable aleatoria x puede tomar valores sólo en el intervalo a, b. Ahí todo valor es igualmente probable.
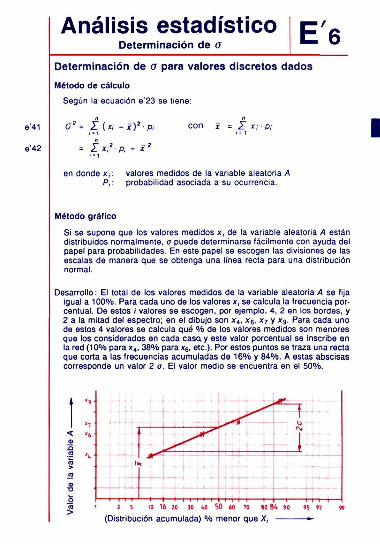
Análisis estadístico Determinación de a E'6
Determinación de a para valores discretos dados
Método de cálculo Según la ecuación e'23 se tiene:
O* = ¿ (x, -Z)*p; con í « ¿ *;p;
= Íx;'.P;- i2
en donde x,: valores medidos de la variable aleatoria A P¡: probabilidad asociada a su ocurrencia.
Método gráfico
Si se supone que los valores medidos x¡ de la variable aleatoria A están distribuidos normalmente, a puede determinarse fácilmente con ayuda del papel para probabilidades. En este papel se escogen las divisiones de las escalas de manera que se obtenga una línea recta para una distribución normal.
Desarrollo: El total de los valores medidos de la variable aleatoria A se fija igual a 100%. Para cada uno de los valores X; se calcula la frecuencia porcentual. De estos i valores se escogen, por ejemplo, 4, 2 en los bordes, y 2 a la mitad del espectro; en el dibujo son x4, x6, x7 y x9. Para cada uno de estos 4 valores se calcula qué % de los valores medidos son menores que los considerados en cada cases y este valor porcentual se inscribe en la red (10% para x4, 38% para x6, etc.). Por estos puntos se traza una recta que corta a las frecuencias acumuladas de 16% y 84%. A estas abscisas corresponde un valor 2 a. El valor medio se encuentra en el 50%.
1 5 10 16 JO 30 1.0 50 60 10 00 8*. 90
(Distribución acumulada) % menor que X¡
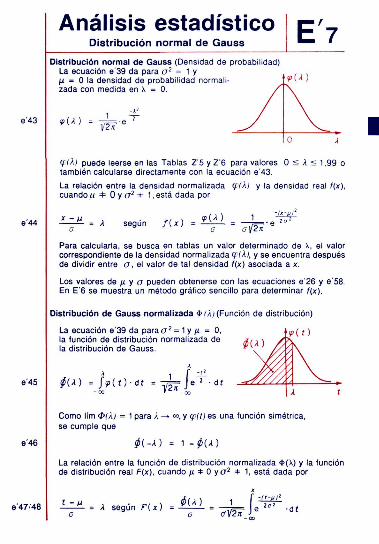
Análisis estadístico Distribución normal de Gauss E'7
Distribución normal de Gauss (Densidad de probabilidad) La ecuación e'39 da para o2 1 y u. = 0 la densidad de probabilidad normal zada con medida en X = 0.
<p(A) * V57
<p{Á) puede leerse en las Tablas Z'5 y Z'6 para valores 0 S A £ 1,99 o también calcularse directamente con la ecuación e'43.
La relación entre la densidad normalizada </tÁ) y la densidad real l(x), cuando a =t= 0 y o2 * 1, está dada por
según / ( * ) = >U) :f¿¿
Para calcularla, se busca en tablas un valor determinado de X, el valor correspondiente de la densidad normalizada y<A), y se encuentra después de dividir entre o, el valor de tal densidad f(x) asociada a x.
Los valores de ¡i y a pueden obtenerse con las ecuaciones e'26 y e'58. En E'6 se muestra un método gráfico sencillo para determinar f(x).
Distribución de Gauss normalizada $ fÁ) (Función de distribución)
La ecuación e'39 da para o2 = 1 y ¡i = 0, \<p( t) la función de distribución normalizada de la distribución de Gauss.
A
0(A) = J V ( O d í = -rj= Je > -út
Como lim <WA) = 1 para A —» «>, y gjfy es una función simétrica, se cumple que
í S ( - A ) = 1 -$(A)
La relación entre la función de distribución normalizada <í>(\) y la función de distribución real F(x), cuando n * 0 y<72 * 1, está dada por
í -ti X según / " (x ) 5(A) 0-V5F
* -.[.^•d.
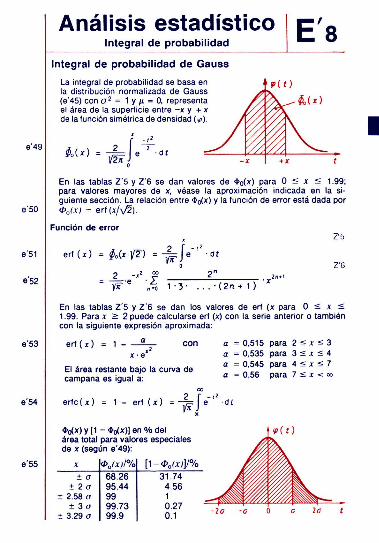
Análisis estadístico Integral de probabilidad E'8
Integral de probabilidad de Gauss
La integral de probabilidad se basa en la distribución normalizada de Gauss (e'45) con o2 = 1 y ¡i = 0, representa el área de la superficie entre -x y + x de la función simétrica de densidad (»>).
•9it)
Mx) V5S-J
En las tablas Z'5 y Z'6 se dan valores de * o M pafa 0 — x - 1 -99; para valores mayores de x, véase la aproximación indicada en la siguiente sección. La relación entre *o(x) y la función de error está dada por 0o(x) = erf(.v/\^).
Función de error * Z'5
erf(x) = fob-fT) ' -hj*'' > d í
* n "7'C
y * ' 6 V?ü 1-3- (2rt+ 1)
En las tablas Z'5 y Z'6 se dan los valores de erf (x para 0 s x £ 1.99. Para x a 2 puede calcularse erf (x) con la serie anterior o también con la siguiente expresión aproximada:
er f (x) = 1 con
El área restante bajo la curva de campana es igual a:
0,515 para 2 S i < 3 0.535 para 3 S x s 4 0.545 para 4 == x < 7
■ 0,56 para 7 £ x < oo
erfc ( x) = 1 - erf ( x) = Iff.
*o(x) y [1 - *oí")] en % del área total para valores especiales de x (según e'49):
x ± o
±2a ± 2.58 a
±3a ± 3.29 a
*„W/% 68.26 95.44 99 99.73 99.9
[1 -<¡>„<x)]/% 31.74
4.56 1 0.27 0.1
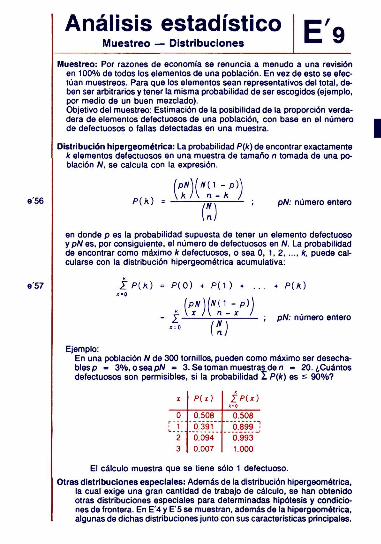
Análisis estadístico Muestreo — Distribuciones E'9
Muestreo: Por razones de economía se renuncia a menudo a una revisión en 100% de todos los elementos de una población. En vez de esto se efectúan muéstreos. Para que los elementos sean representativos del total, deben ser arbitrarios y tener la misma probabilidad de ser escogidos (ejemplo, por medio de un buen mezclado). Objetivo del muestreo: Estimación de la posibilidad de la proporción verdadera de elementos defectuosos de una población, con base en el número de defectuosos o fallas detectadas en una muestra.
Distribución hipergeométrica: La probabilidad P(k) de encontrar exactamente k elementos defectuosos en una muestra de tamaflo n tomada de una población W, se calcula con la expresión.
P(K) = M(T - p )
a pN: número entero
en donde p es la probabilidad supuesta de tener un elemento defectuoso y pN es, por consiguiente, el número de defectuosos en W. La probabilidad de encontrar como máximo k defectuosos, o sea 0, 1, 2 k, puede calcularse con la distribución hipergeométrica acumulativa:
I P(h) = P (0 ) + P ( l ) *
, fc'Jft'-V0) ÍSJ
P(k)
pN: número entero
Ejemplo: En una población N de 300 tornillos, pueden como máximo ser desecha-blesp - 3%,oseapN = 3. Se toman muestras de n = 20. ¿Cuántos defectuosos son permisibles, si la probabilidad I P(k) es £ 90%?
X
0
i ' 2 3
P ( r )
0.508 0.391 0.094 0.007
¿P(x) 1*0
0.508 Ó.8_99 ] 0.993 1.000
El cálculo muestra que se tiene sólo 1 defectuoso. Otras distribuciones especiales: Además de la distribución hipergeométrica,
la cual exige una gran cantidad de trabajo de cálculo, se han obtenido otras distribuciones especiales para determinadas hipótesis y condiciones de frontera. En E'4 y E'5 se muestran, además de la hipergeométrica, algunas de dichas distribuciones junto con sus características principales.
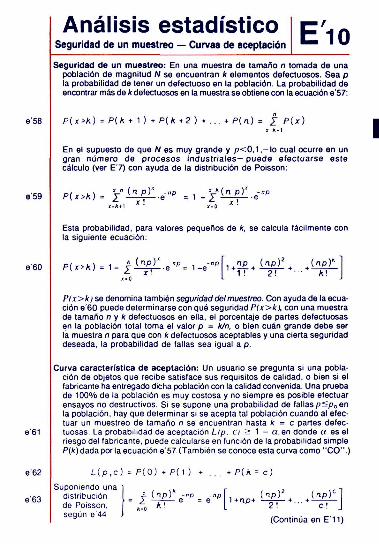
Análisis estadístico Seguridad de un muestreo — Curvas de aceptación
Seguridad de un muestreo: En una muestra de tamaño n tomada de una población de magnitud N se encuentran k elementos defectuosos. Sea p la probabilidad de tener un defectuoso en la población. La probabilidad de encontrar más de k defectuosos en la muestra se obtiene con la ecuación e'57:
e'58 P{x>K) = P(A + 1) + P(A +2 ) + . . . * P(n) = ¿ P(x)
En el supuesto de que N es muy grande y /><0,1, - lo cual ocurre en un gran número de procesos indus t r ia les - puede efectuarse este cálculo (ver E'7) con ayuda de la distribución de Poisson:
e59 P(x>A) * 'flnpV.e-P . , .fíüjáf..-""
Esta probabilidad, para valores pequeños de k, se calcula fácilmente con ia siguiente ecuación:
e'60 P(x>A) = ,- f 1^ . . -» . l-e-pf1+^+ Í2jí! ♦ ... + Üg>lj
P(x>k) se denomina también seguridad del muestreo. Con ayuda de la ecuación e'60 puede determinarse con qué seguridad P(x>k), con una muestra de tamaño n y k defectuosos en ella, el porcentaje de partes defectuosas en la población total toma el valor p ■ k/n, o bien cuan grande debe ser la muestra n para que con k defectuosos aceptables y una cierta seguridad deseada, la probabilidad de fallas sea igual a p.
Curva característica de aceptación: Un usuario se pregunta si una población de objetos que recibe satisface sus requisitos de calidad, o bien si el fabricante ha entregado dicha población con la calidad convenida. Una prueba de 100% de la población es muy costosa y no siempre es posible efectuar ensayos no destructivos. Si se supone una probabilidad de fa l lasp^p 0 en la población, hay que determinar si se acepta tal población cuando al efectuar un muestreo de tamaño n se encuentran hasta k = c partes defec-
e'61 tuosas. La probabilidad de aceptación Llp. o > 1 - a,en donde a es el riesgo del fabricante, puede calcularse en función de la probabilidad simple P(k) dada por la ecuación e'57. (También se conoce esta curva como "CO".)
e'62 | L ( p , c ) - P ( 0 ) + P ( l ) + . , . + P ( A s c )
(Continúa en E'11)
E'i
üuponienao una distribución de Poisson, seaún e'44
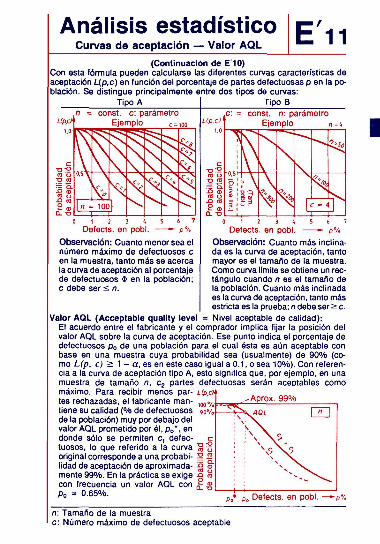
Análisis estadístico Curvas de aceptación — Valor AQL E'11
(Continuación de E'10) Con esta fórmula pueden calcularse las diferentes curvas características de aceptación L(p,c) en función del porcentaje de partes defectuosas p en la población. Se distingue principalmente entre dos tipos de curvas:
Tipo A Tipo B n = const. c: parámetro
"fedt Ejemplo f l « Upx)' const. n: parámetro
Ejemplo
Defects. en pobl. — " - p% Observación: Cuanto menor sea el número máximo de defectuosos c en la muestra, tanto más se acerca la curva de aceptación al porcentaje de defectuosos * en la población; c debe ser < n.
Defects. en pobl. — P% Observación: Cuanto más inclinada es la curva de aceptación, tanto mayor es el tamaño de la muestra. Como curva límite se obtiene un rectángulo cuando n es el tamaño de la población. Cuanto más inclinada es la curva de aceptación, tanto más estricta es la prueba: n debe ser > c.
i Nivel aceptable de calidad): El acuerdo entre el fabricante y el comprador implica fijar la posición del valor AQL sobre la curva de aceptación. Ese punto indica el porcentaje de defectuosos p0 de una población para el cual ésta es aún aceptable con base en una muestra cuya probabilidad sea (usualmente) de 90% (como L(p, c) a 1 - a, es en este caso igual a 0.1, o sea 10%). Con referencia a la curva de aceptación tipo A, esto significa que, por ejemplo, en una muestra de tamaño n, c2 partes defectuosas serán aceptables como máximo. Para recibir menos par- Upe)
Valor AQL (Acceptable quality level
100% 90%
tes rechazadas, el fabricante mantiene su calidad (% de defectuosos de la población) muy por debajo del valor AQL prometido por él, p0", en donde sólo se permiten c, defec- c tuosos, lo que referido a la curva ^ % original corresponde a una probabi- ^ 2 lidad de aceptación de aproximada- s S mente 99%. En la práctica se exige -o a con frecuencia un valor AQL con ¿ °> p0 - 0.65%.
-Aprox. 99%
n: Tamaño de la muestra c: Número máximo de defectuosos aceptable
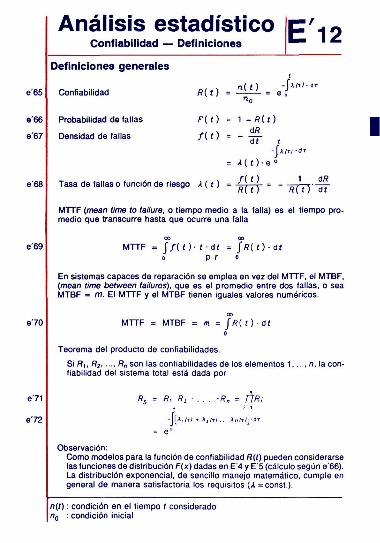
Análisis estadístico Confiabilidad — Definiciones E'12
Definiciones generales
Confiabilidad /?(r) = -¡ im
probabilidad de fallas r(t) = l - f l ( í ) dR
Densidad de fallas / ( ( )
Tasa de fallas o función de riesgo A ( í )
d< i
= Á(t)-e°
_ / ( < ) 1 iR_ R(t) ' ~RTH di
MTTF (mean time to failure, o tiempo medio a la falla) es el tiempo promedio que transcurre hasta que ocurre una falla
MTTF - J / ( t) ■ t ■ d i = / « ( r ) • d t o p r o
En sistemas capaces de reparación se emplea en vez del MTTF, el MTBF, (mean time between failures), que es el promedio entre dos fallas, o sea MTBF = m. El MTTF y el MTBF tienen ¡guales valores numéricos.
MTTF = MTBF = m = / « ( í ) • d t
Teorema del producto de confiabilidades.
Si R,, R2 R/i son las confiabilidades de los elementos 1, fiabilidad del sistema total está dada por
R, R¡ ■ .. . .•«„ = fJR¡ t - ' ■ <
-J[A,/TJ * *IÍT) ... An/rjJ-dr
Observación: Como modelos para la función de confiabilidad R(t) pueden considerarse las funciones de distribución F(x) dadas en E'4 y E'5 (cálculo según e'66). La distribución exponencial, de sencillo manejo matemático, cumple en general de manera satisfactoria los requisitos (X = const.).
n(t): condición en el tiempo ( considerado n0 : condición inicial
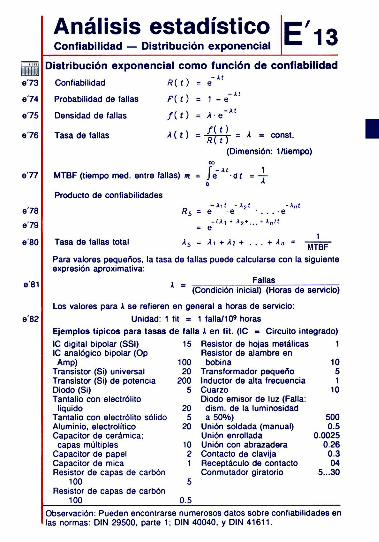
Análisis estadístico Confiabilidad — Distribución exponencial E'13
Distribución exponencial como función de confiabilidad Confiabilidad
Probabilidad de fallas
Densidad de fallas
Tasa de fallas
R(t) = e
r(t) = 1 - e " A '
fit) = Ae'1'
A ( t) = - ¿ j j j - = A - const.
(Dimensión: 1/tiempo)
MTBF (tiempo med. entre fallas) m - Je d( = - j -
Producto de confiabilidades
fls = e
Tasa de fallas total = e = Al + ¿2
ÍA-j + A2+ . . . + A„)t
. + A„ 1 MTBF
Para valores pequeños, la tasa de fallas puede calcularse con la siguiente expresión aproximativa:
, _ Fallas (Condición inicial) (Horas de servicio)
Los valores para l se refieren en general a horas de servicio: Unidad: 1 fit = 1 falla/109 horas
Ejemplos típicos para tasas de falla A en fit. (IC = Circuito integrado) IC digital bipolar (SSI) IC analógico bipolar (Op Amp)
Transistor (Si) universal Transistor (Si) de potencia Diodo (Si) Tantalio con electrólito
liquido Tantalio con electrólito sólido Aluminio, electrolítico Capacitor de cerámica:
capas múltiples Capacitor de papel Capacitor de mica Resistor de capas de carbón
100 Resistor de capas de carbón
100
15
100 20
200 5
20 5
20
10 2 1
5
0.5
Resistor de hojas metálicas Resistor de alambre en
bobina Transformador pequeño Inductor de alta frecuencia Cuarzo Diodo emisor de luz (Falla:
dism. de la luminosidad a 50%)
Unión soldada (manual) Unión enrollada Unión con abrazadera Contacto de clavija Receptáculo de contacto Conmutador giratorio
1
10 5 1
10
500 0.5
0.0025 0.26
0.3 04
5...30
Observación: Pueden encontrarse numerosos datos sobre confiabilidades en las normas: DIN 29500, parte 1; DIN 40040, y DIN 41611.
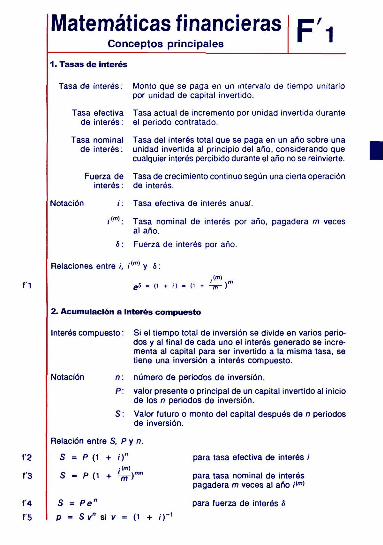
Matemáticas financieras Conceptos principales
1. Tasas de interés
Tasa de interés:
Tasa efectiva de interés:
Tasa nominal de interés:
Fuerza de interés:
Notación / :
, ( m ) .
6:
Relaciones entre i,
F'i Monto que se paga en un intervalo de tiempo unitario por unidad de capital invertido.
Tasa actual de incremento por unidad invertida durante el periodo contratado.
Tasa del interés total que se paga en un año sobre una unidad invertida al principio del año, considerando que cualquier interés percibido durante el año no se reinvierte.
Tasa de crecimiento continuo según una cierta operación de interés.
Tasa efectiva de interés anual.
Tasa nominal de interés por año, pagadera m veces al año.
Fuerza de interés por año.
« y 6 .
(m) eS . (i ♦ I) = (1 ♦ -m-)r"
2. Acumulación a interés compuesto
Interés compuesto:
Notación n:
P:
S:
Relación entre S, P
S m P (1 + i ) "
Si el tiempo total de inversión se divide en varios periodos y al final de cada uno el interés generado se incrementa al capital para ser invertido a la misma tasa, se tiene una inversión a interés compuesto.
número de periodos de inversión.
valor presente o principal de un capital invertido al inicio de los n periodos de inversión.
Valor futuro o monto del capital después de n periodos de inversión.
y .
para tasa efectiva de interés / ;vnj
S - P (1 + -7H")™ P a r a t a s a n ° m i n a l de interés pagadera m veces al año i'<m>
S = Pe"
p = S v" si v =
para fuerza de interés 6
(1 + O"1
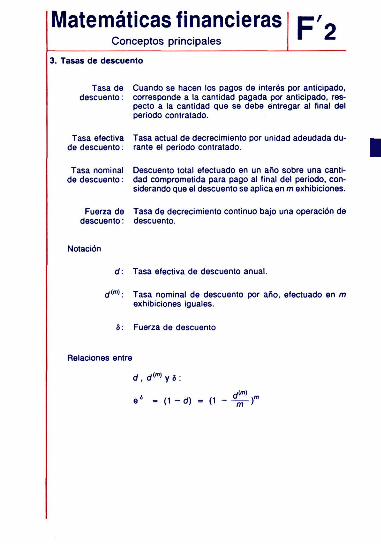
Matemáticas financieras Conceptos principales F'2
3. Tasas de descuento
Tasa de Cuando se hacen los pagos de interés por anticipado, descuento: corresponde a la cantidad pagada por anticipado, res
pecto a la cantidad que se debe entregar al final del periodo contratado.
Tasa efectiva Tasa actual de decrecimiento por unidad adeudada dude descuento: rante el periodo contratado.
Tasa nominal Descuento total efectuado en un año sobre una canti-de descuento: dad comprometida para pago al final del periodo, con
siderando que el descuento se aplica en m exhibiciones.
Fuerza de Tasa de decrecimiento continuo bajo una operación de descuento: descuento.
Notación
ti: Tasa efectiva de descuento anual.
d'"" : Tasa nominal de descuento por año, efectuado en m exhibiciones iguales.
5: Fuerza de descuento
Relaciones entre
d , d(m) y 6 :
e5 = (1 - d) dm
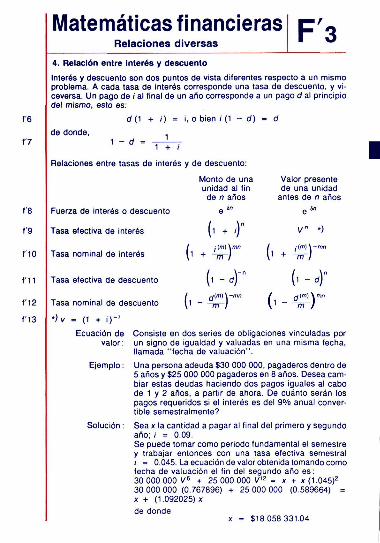
Matemáticas financieras Relaciones diversas F'3
4. Relación entre interés y descuento
Interés y descuento son dos puntos de vista diferentes respecto a un mismo problema. A cada tasa de interés corresponde una tasa de descuento, y viceversa. Un pago de i al final de un año corresponde a un pago d al principio del mismo, esto es:
de donde,
d ( 1 + i) = i, o bien i (1 - d) = d
Relaciones entre tasas de interés y de descuento:
Monto de una unidad al fin
de n años
Fuerza de interés o descuento
Tasa efectiva de interés
Tasa nominal de interés
Tasa efectiva de descuento
Tasa nominal de descuento
*) v = (1 + i ) " 1
Valor presente de una unidad
antes de n años - ir,
(t ♦ ,)■
(i ♦ S T (i - r
o * cr (1 - O"
Ecuación de valor:
Ejemplo:
Solución:
Consiste en dos series de obligaciones vinculadas por un signo de igualdad y valuadas en una misma fecha, llamada "fecha de valuación".
Una persona adeuda $30 000 000, pagaderos dentro de 5 años y $25 000 000 pagaderos en 8 años. Desea cambiar estas deudas haciendo dos pagos iguales al cabo de 1 y 2 años, a partir de ahora. De cuánto serán los pagos requeridos si el interés es del 9% anual convertible semestralmente?
Sea x la cantidad a pagar al final del primero y segundo año; i = 0.09. Se puede tomar como periodo fundamental el semestre y trabajar entonces con una tasa efectiva semestral / = 0.045. La ecuación de valor obtenida tomando como fecha de valuación el fin del segundo año es: 30 000 000 V6 + 25 000 000 V'2 = x + x (1.045)2
30 000 000 (0.767896) + 25 000 000 (0.589664) = x + (1.092025) x de donde
x = $18 058 331.04
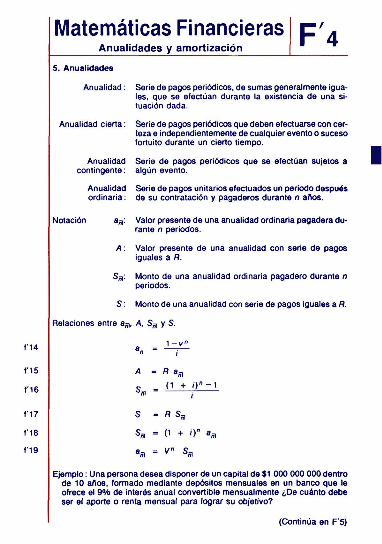
Matemáticas Financieras Anualidades y amortización F'4
5. Anualidades
Anualidad: Serie de pagos periódicos, de sumas generalmente iguales, que se efectúan durante la existencia de una situación dada.
Anualidad cierta: Serie de pagos periódicos que deben efectuarse con certeza e independientemente de cualquier evento o suceso fortuito durante un cierto tiempo.
Anualidad Serie de pagos periódicos que se efectúan sujetos a contingente: algún evento.
Anualidad Serie de pagos unitarios efectuados un periodo después ordinaria: de su contratación y pagaderos durante n afios.
Notación a-„-¡: Valor presente de una anualidad ordinaria pagadera durante n periodos.
A: Valor presente de una anualidad con serie de pagos iguales a R.
Sff. Monto de una anualidad ordinaria pagadero durante n periodos.
S: Monto de una anualidad con serie de pagos iguales a R.
Relaciones entre am, A, S^ y S.
1 - v "
A = R <m _ _ (1 + i ) " - i s<" ; — S = R S „
S» = d + 0 " a s
Ejemplo: Una persona desea disponer de un capital de $1 000 000 000 dentro de 10 arlos, formado mediante depósitos mensuales en un banco que le ofrece el 9% de interés anual convertible mensualmente ¿De cuánto debe ser el aporte o renta mensual para lograr su objetivo?
(Continúa en F'5)
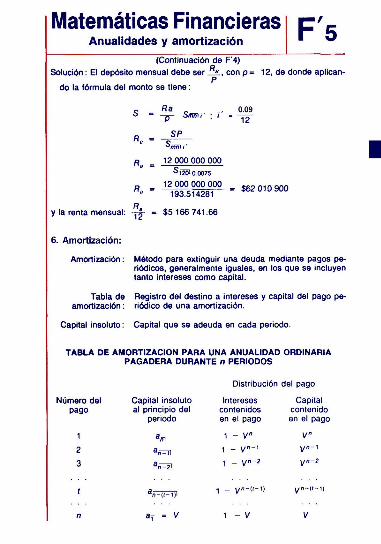
Matemáticas Financieras Anualidades y amortización F'5
(Continuación de F'4) D
Solución: El depósito mensual debe ser Os., con p = 12, de donde aplican-P
do la fórmula del monto se tiene:
Ha Srñmi'
SP
12 000 000 000 Si2fjl 0.0075
12 000 000 000 193.514281
0.09 12
$62 010 900
y la renta mensual: -rí- - $5 166 741 66
6. Amort izac ión:
Amortización: Método para extinguir una deuda mediante pagos periódicos, generalmente iguales, en los que se incluyen tanto intereses como capital.
Tabla de Registro del destino a intereses y capital del pago pe-amortización : riódico de una amortización.
Capital insoluto: Capital que se adeuda en cada periodo.
TABLA DE AMORTIZACIÓN PARA UNA ANUALIDAD ORDINARIA PAGADERA DURANTE n PERIODOS
Distribución del pago
Número del pago
1
2
3
t
n
Capital insoluto al principio del
periodo
*m
«Í=TI "^
an-(l-1)l
aT = V
Intereses contenidos en el pago
1 - V
1 - V"-'
1 - V " - 2
, - yo- í i - l )
1 - V
Capital contenido en el pago
V" y » - i
V»-2
yn-<<-iJ
V

Matemáticas Financieras Casos especiales F'6
7. Casos especiales de anualidades
Anualidad Anualidad en la cual el primer pago se efectúa al prin-anticipada: cipio del periodo.
Anualidad Anualidad ordinaria en la que se establece que el pri-diferida: mer pago se efectuará después de un cierto número de
periodos. Perpetuidad: Anualidad en la que se estipula efectuar pagos en forma
indefinida. Anualidad Anualidad en la que el monto de los pagos crece pe-creciente : riodo a periodo. Anualidad Anualidad en la que el monto de los pagos decrece pe
riodo a periodo. decreciente Notación am
a „
(D»)„-,
••a
Valor presente de una anualidad unitaria anticipada. Monto de una anualidad unitaria anticipada pagadera durante n periodos. Valor presente de una anualidad unitaria diferida m periodos. Valor presente de una perpetuidad unitaria. Valor presente de una anualidad unitaria con primer pago unitario y que crece aritméticamente 1 unidad por periodo. Valor presente de una anualidad unitaria con primer pago n y que decrece aritméticamente 1 unidad por periodo. Valor presente de una anualidad unitaria con p pagos iguales por periodo. Monto de una anualidad unitaria con p pagos iguales por periodo.
Relaciones entre diferentes tipos de anualidades.
á'si - 0 + '') «m
S„n - S„-m " 1
m/am = V » * ,
(Continúa en F'7)
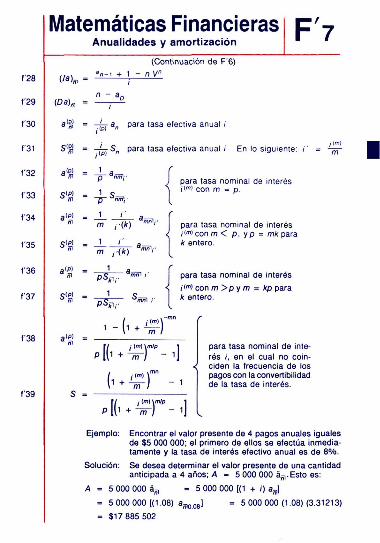
Matemáticas Financieras Anualidades y amortización F'7
(Continuación de F'6)
n - an
<£>*>*, = — r 2 -
a'sj = -j— a„ para tasa efectiva anual i
s'Si
•fl
. (p)
i ¡ S „ para tasa efectiva anual i En lo siguiente: ;" =
„ 1 P 1
para tasa nominal de interés /("») con m = p.
S'S» =
s'S
p " 1 m
1
1
1
/"
i "
•<*) mn
para tasa nominal de interés í<">) con m < p, y p = mít para k entero.
para tasa nominal de interés i(<>») con m > p y m = kp para
^ Í V
(1 +V) para tasa nominal de interés ;', en el cual no coinciden la frecuencia de los pagos con la convertibilidad de la tasa de interés. (I + £ ) " - i
Ejemplo: Encontrar el valor presente de 4 pagos anuales iguales de $5 000 000: el primero de ellos se efectúa inmediatamente y la tasa de interés efectivo anual es de 8%.
Solución: Se desea determinar el valor presente de una cantidad anticipada a 4 años: A = 5 000 000 ás .Esto es:
A = 5 000 000 Sj, = 5 000 000 [(1 + i) as]
= 5 000 000 [(1.08) a ^ o j ] = 5 000 000 (1.08) (3.31213)
= $17 885 502
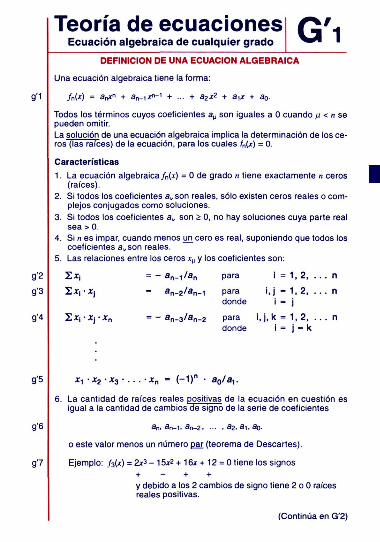
Teoría de ecuaciones Ecuación algebraica de cualquier grado G'i
DEFINICIÓN DE UNA ECUACIÓN ALGEBRAICA
Una ecuación algebraica tiene la forma:
/nW = an¡" + an_,jrn-' + ... + a2x2 + a,x + a0.
Todos los términos cuyos coeficientes av son iguales a 0 cuando n < n se pueden omitir. La solución de una ecuación algebraica implica la determinación de los ceros (las rafees) de la ecuación, para los cuales f„{x) = 0.
Características 1. La ecuación algebraica/nW = 0 de grado n tiene exactamente n ceros
(raíces). 2. Si todos los coeficientes a„ son reales, sólo existen ceros reales o com
plejos conjugados como soluciones. 3. Si todos los coeficientes a„ son > 0, no hay soluciones cuya parte real
sea > 0. 4. Si n es impar, cuando menos un_ cero es real, suponiendo que todos los
coeficientes a„son reales. 5. Las relaciones entre los ceros x„ y los coeficientes son:
2 * i = - an.:/an para 1 = 1 , 2 , . . . n 2 JT| - Jtj = an.j /a,,. , para i,j = 1 , 2 , . . . n
donde i = j
2 * i -x¡-x„ = - an_3/an_2 para I, j , k = 1, 2, . . . n donde i = ] = k
x, x2x3- .. . -x„ - (-1)" • a0lay
6. La cantidad de raíces reales positivas de la ecuación en cuestión es igual a la cantidad de cambios de signo de la serie de coeficientes
a„, a„-i, a„-2 a2, ai.ao.
o este valor menos un número par (teorema de Descartes).
Ejemplo: /3(x) = 2*3 - 15*2 + 16x + 12 = 0 tiene los signos + - + + y debido a los 2 cambios de signo tiene 2 o 0 raíces reales positivas.
(Continúa en G'2)
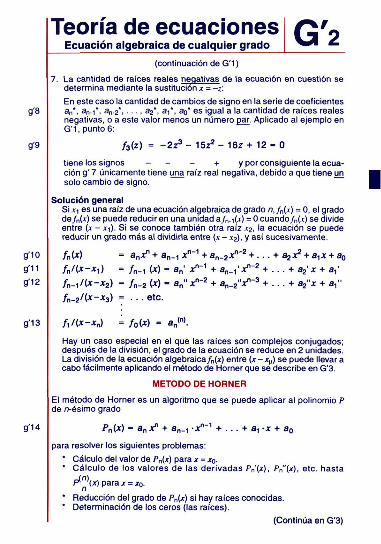
Teoría de ecuaciones I Q.'9 Ecuación algebraica de cualquier grado j ^"* ~
(continuación de G'1) 7. La cantidad de raíces reales negativas de la ecuación en cuestión se
determina mediante la sustitución x - -z: En este caso la cantidad de cambios de signo en la serie de coeficientes an*, an-i*, an.2* a2*, a-¡', ao* es igual a la cantidad de raíces reales negativas, o a este valor menos un número par. Aplicado al ejemplo en G"l, punto 6:
f3(z) = -2Z3 - 15Z2 - 16z + 12 = 0 tiene los signos - - - + y por consiguiente la ecuación g' 7 únicamente tiene una raíz real negativa, debido a que tiene un solo cambio de signo.
Solución general Si J:I es una raíz de una ecuación algebraica de grado n,f„(x) = 0, el grado de/„M se puede reducir en una unidad a/n-i(jr) = 0 cuando/n(j:) se divide entre (* - x-¡). Si se conoce también otra raíz X2, la ecuación se puede reducir un grado más al dividirla entre (x -x2).y así sucesivamente.
/nW / n / ( * - * l ) / n - i / ( í - J T 2 ) f„-2/(x-X3)
= a„x" + an_i x" 1 + an.2jrn"2 + . . . + a 2* 2 + a,;t + a0
= /n-1 W " < x"-'1 + an.y'x"-2 + . . . + a¿x + a,' = /n-2 ix) - an" x"-* + an.2"xn-3 + . . . + a2"x + a," = . . . etc.
hHx-xn) = f0(x) - an<n>.
Hay un caso especial en el que las raíces son complejos conjugados; después de la división, el grado de la ecuación se reduce en 2 unidades. La división de la ecuación algebraica f„(x) entre (x - xv) se puede llevar a cabo fácilmente aplicando el método de Horner que se describe en G'3.
MÉTODO DE HORNER El método de Horner es un algoritmo que se puede aplicar al polinomio P de n-ésimo grado
Pn(x) - anx" + a „ . , -x" - 1 + . . . + a, x + a0
para resolver los siguientes problemas: * Cálculo del valor de P„(x) para x = jr0. * Cálculo de los valores de las derivadas P¿(x), P„"(x), etc. hasta
para x = XQ. * Reducción del grado de P„(x) si hay raíces conocidas. * Determinación de los ceros (las raíces).
(Continúa en G'3)
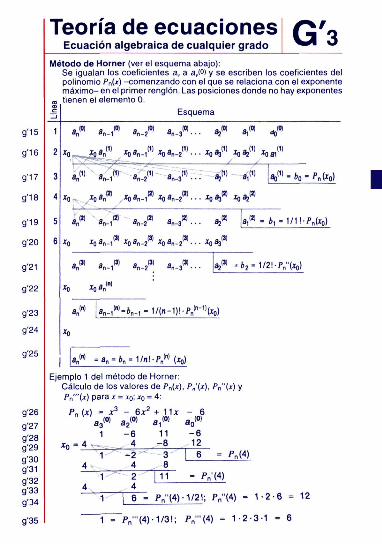
Teoría de ecuaciones Ecuación algebraica de cualquier grado G'3
Método de Horner (ver el esquema abajo): Se igualan los coeficientes av a av(°) y se escriben los coeficientes del polinomio P„(x) -comenzando con el que se relaciona con el exponente máximo- en el primer renglón. Las posiciones donde no hay exponentes
„ tienen el elemento 0.
i 1
Esquema
f ^ « n H x0an . , l2 ' í o a n .2 l ! ' . . . í oa3( 2 )
a » - a „ > a,,.,® a ^ « . . . *»■
^a„-,3 ) í0an .2 '3) I oan .2 f " . . . í oa3™
*® *„.,» 8„.2« a„.,«...
^ n 1 " 1
a„w í „ - , w = V i = 1/(«-1)!-Pn|n-1|t<
an(0) = an = ¡,n-1/n!•/■„<"> Uo>
^
o)
a , " «,w
^ * « . "
a 0| , | - t o - í , n W
« , « - * , - 1 / 1 !-J>„(«b)
-& 2 -1 / ¡ i 'VW
Ejemplo 1 del método de Horner: Cálculo de los valores de P„{x), P„"(x), Pn"(x) y P„'"(x) para x = x0; x0 = 4:
f , M 6 ^ + 1 1 *
' o - 4 ~ - .
a3«» a2<°l « , » " ao"»6
- 6 12
11 -8
6 PnW
11 fVH)
T~6~^ P„"(4)-1/2!; P„"(4) - 1-2-6 = 12
~>n'"(4)-1/3!; P„'"(4) - 1-2-3-1 = 6
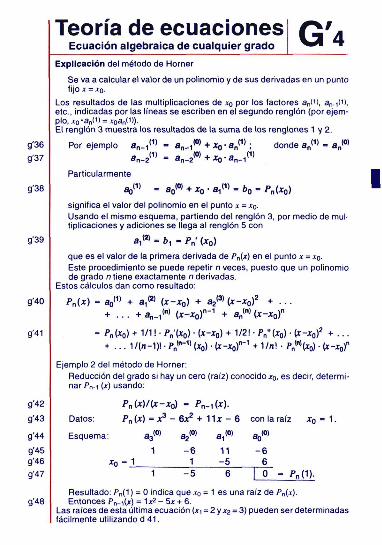
Teoría de ecuaciones Ecuación algebraica de cualquier grado G'4
Explicación del método de Horner
Se va a calcular el valor de un polinomio y de sus derivadas en un punto fijo x = XQ.
Los resultados de las multiplicaciones de x0 por los factores an0), a,,.,!'), etc., indicadas por las líneas se escriben en el segundo renglón (por ejemplo, A0-anO) = j:oan<1))-El renglón 3 muestra los resultados de la suma de los renglones 1 y 2.
Por ejemplo an_i<1) - a,,.!10' + x0 • an(1>; donde a„(1) - an
(01
«n-2 «n-2 + x0 an-1
Particularmente
ao'1> = a0W+x0-a,W-b0-P„{x0)
significa el valor del polinomio en el punto x = jt0. Usando el mismo esquema, partiendo del renglón 3, por medio de multiplicaciones y adiciones se llega al renglón 5 con
a,<2> - 6 , - />„' (x0) que es el valor de la primera derivada de Pn(x) en el punto x = x0. Este procedimiento se puede repetir n veces, puesto que un polinomio de grado n tiene exactamente n derivadas.
Estos cálculos dan como resultado:
Pn(x) ■= a0<1> + a,<2» (*-*„) + a2<3' íx-xa? * . . . + . . . + a,,.,'"' (x-xor1 + an
(n| ix-x0)°
= P„(x0) + 1/1! • P„'(x0) ■ (x-x0) + 1/2! • P , "W • lx~x0)2 + . . . + . . . 1/(n-1)l • Pn
("-11 (*0) • tc-xo)""1 + 1/nl ■ P^(xo) ■ lx-x¿f
Ejemplo 2 del método de Horner: Reducción del grado si hay un cero (raíz) conocido jt0. es decir, determinar /V i W usando:
Datos:
Esquema:
*0
P„(x)/(¿-x0) = Pn
Pn (x) - JC3
a / ' 1
= 1 1
- 6 * * +
a2«» - 6
1 - 5
_,(*). 1 1 í - 6
a,™ 11 -5
6
con la raíz x0 -
ao(0)
- 6 6
I 0 = />„(1).
1
Resultado: />„(1) = 0 Indica que v0 = 1 es una raíz de P„(x). Entonces />n-iW = 1JT2 - 5or + 6.
Las raíces de esta última ecuación (*i = 2 y jr2 = 3) pueden ser determinadas fácilmente utilizando d 41.
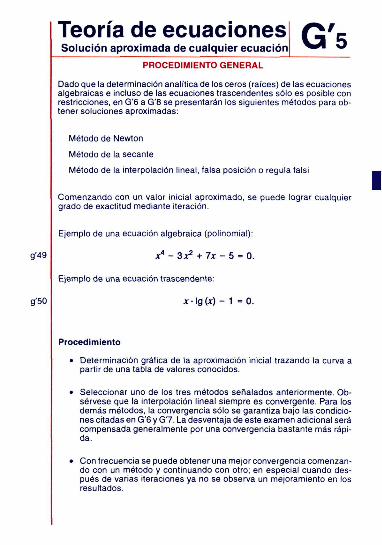
Teoría de ecuaciones Solución aproximada de cualquier ecuación G'i
PROCEDIMIENTO GENERAL
Dado que la determinación analítica de los ceros (raíces) de las ecuaciones algebraicas e incluso de las ecuaciones trascendentes sólo es posible con restricciones, en G'6 a G'8 se presentarán los siguientes métodos para obtener soluciones aproximadas:
Método de Newton
Método de la secante
Método de la interpolación lineal, falsa posición o regula falsi
Comenzando con un valor inicial aproximado, se puede lograr cualquier grado de exactitud mediante iteración.
Ejemplo de una ecuación algebraica (polinomial):
x" - 3x? + 7x - 5 = 0.
Ejemplo de una ecuación trascendente:
x - l g M - 1 =0.
Procedimiento
• Determinación gráfica de la aproximación inicial trazando la curva a partir de una tabla de valores conocidos.
• Seleccionar uno de los tres métodos señalados anteriormente. Obsérvese que la interpolación lineal siempre es convergente. Para los demás métodos, la convergencia sólo se garantiza bajo las condiciones citadas en G'6 y G'7. La desventaja de este examen adicional será compensada generalmente por una convergencia bastante más rápida.
• Con frecuencia se puede obtener una mejor convergencia comenzando con un método y continuando con otro; en especial cuando después de varias iteraciones ya no se observa un mejoramiento en los resultados.
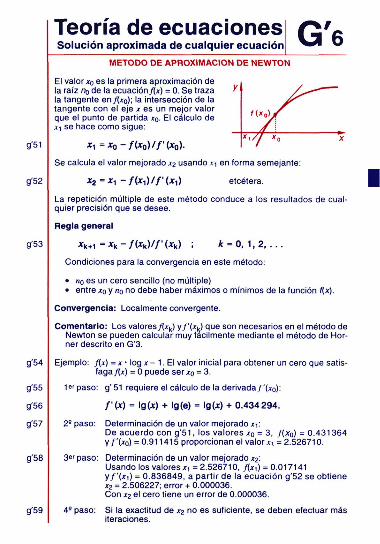
Teoría de ecuaciones Solución aproximada de cualquier ecuación G'6
MÉTODO DE APROXIMACIÓN DE NEWTON
El valoreo es la primera aproximación de la raíz no de la ecuación^*) = 0. Se traza la tangente enfl,x0); la intersección de la tangente con el eje x es un mejor valor que el punto de partida x0. El cálculo de xi se hace como sigue:
*1 = x0-f{x0)/f{x0). Se calcula el valor mejorado X2 usando xi en forma semejante:
x2 = x-, - / ( * , ) / / ' (je,) etcétera.
La repetición múltiple de este método conduce a los resultados de cualquier precisión que se desee.
Regla general
*k+1 = *k " f W f (*k) ! * - 0, 1 , 2, . . .
Condiciones para la convergencia en este método:
• no es un cero sencillo (no múltiple) • entre x¡¡ y n0 no debe haber máximos o mínimos de la función f{x).
Convergencia: Localmente convergente.
Comentario: Los valores/(xk) y / ' ( * k ) que son necesarios en el método de Newton se pueden calcular muy fácilmente mediante el método de Hor-ner descrito en G'3.
Ejemplo: f[x) = x • log x - 1. El valor inicial para obtener un cero que satisfaga J[x) = 0 puede ser *o = 3.
le 'paso: g'51 requiere el cálculo de la derivada/'{xo):
/ ' ( * ) = Igt t ) + lg(e) = IgU) + 0.434 294.
2S paso: Determinación de un valor mejorado xf. De acuerdo con g '51 , los valores x0 = 3, / (x 0 ) = 0.431364 y/ ' ( *o) = 0.911415 proporcionan el valor x, = 2.526710.
3<" paso: Determinación de un valor mejorado x¿. Usando los valores x, =2.526710, f(x\) = 0.017141 y / ' ( * i ) = 0.836849, a partir de la ecuación g'52 se obtiene x2 = 2.506227; error + 0.000036. Con X2 el cero tiene un error de 0.000036.
4 f i paso: Si la exactitud de x2 no es suficiente, se deben efectuar más iteraciones.
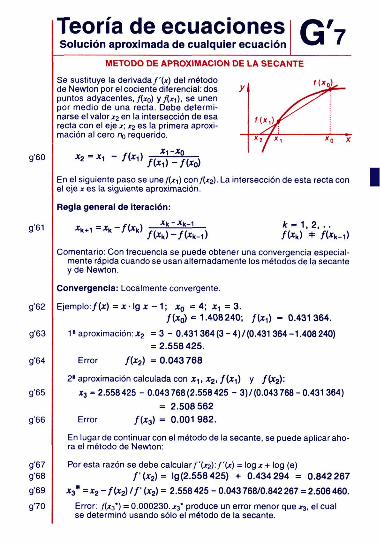
Teoría de ecuaciones Solución aproximada de cualquier ecuación G'7
MÉTODO DE APROXIMACIÓN DE LA SECANTE
Se sustituye la derivada/'(jr) del método de Newton por el cociente diferencial: dos puntos adyacentes, f(xa) y f(x\), se unen por medio de una recta. Debe determinarse el valor x2 en la intersección de esa recta con el eje x; x2 es la primera aproximación al cero n0 requerido.
M*oL
* 2 = * 1 " / (*1> ■*1-*0
/<*i)-/C*o) En el siguiente paso se unef{x}) conf[x2). La intersección de esta recta con el eje x es la siguiente aproximación.
Regla general de iteración: ■*k-*k-1 *k+1 -•*k~/(*k) / ( * „ ) - / (x k - i )
* = 1,2, . . fW * /(*k-i)
Comentario: Con frecuencia se puede obtener una convergencia especialmente rápida cuando se usan alternadamente los métodos de la secante y de Newton.
Convergencia: Localmente convergente.
Ejemplo:/!» = j t - lg x - 1 ; jr0 = 4; *-, = 3. /U0) = 1.408240; /(*,) = 0.431 364.
1« aproximación:x2 = 3 - 0.431 364(3-4)/(0.431 364-1.408240) = 2.558425.
Error f(x2) = 0.043 768
2S aproximación calculada con je,, x2, f{x,) y ffo): x3 - 2.558 425 - 0.043 768 (2.558 425 - 3) / (0.043 768 - 0.431 364)
= 2.508 562 Error f(x3) = 0.001 982.
En lugar de continuar con el método de la secante, se puede aplicar ahora el método de Newton:
Por esta razón sedebecalcular/'te):/'W = log* + log (e) f(x2)= lg(2.558425) + 0.434294 = 0.842267
' 3 * = *2 ~ / t e ) / / ' (*2> = 2.558425 - 0.043 768/0.842 267 = 2.506460. Error: fixz') = 0.000230. JT3" produce un error menor que x3, el cual se determinó usando sólo el método de la secante.
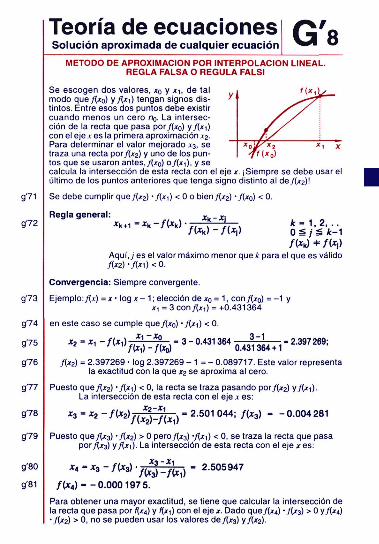
Teoría de ecuaciones Solución aproximada de cualquier ecuación G'8
MÉTODO DE APROXIMACIÓN POR INTERPOLACIÓN LINEAL. REGLA FALSA O REGULA FALSI
Se escogen dos valores, x0 y ¡ci, de tal u M* i ]¿ modo que J\x0) y / ( * i ) tengan signos distintos. Entre esos dos puntos debe existir cuando menos un cero n0. La intersección de la recta que pasa por/(jr0) y / ( * i ) con el eje v es la primera aproximación x2-Para determinar el valor mejorado x¡, se traza una recta po r / fo ) y uno de los puntos que se usaron antes, J\x0) oflx-\), y se calcula la intersección de esta recta con el eje x. ¡Siempre se debe usar el último de los puntos anteriores que tenga signo distinto al d e / ^ ) !
Se debe cumplir que/(*2) • jU\) < 0 o b ien / fo ) ■ f(xo) < 0.
Regla general: *k+ t - * * - / ( * * ) • *k~*i / C * k ) - / ( * j )
fc-1,2,.. 0 S / S k-1
Aquí,) es el valor máximo menor que * para el que es válido
Convergencia: Siempre convergente.
Ejemplo:/!*) -x- l o g x - 1;elección de j r 0 = 1. con/Jxo) = - 1 y jt, = 3 conftx,) = +0.431364
en este caso se cumple quef[x0) • l{'\) < 0.
*2 = *t - / ( * i ) *1 ~ * o
/W-/W - 3 - 0.431 364 3-1 0.431364 + 1
■2.397269;
f[x2) = 2.397269 • log 2.397269 - 1 = - 0.089717. Este valor representa la exactitud con la que jr2 se aproxima al cero.
Puesto quej\x2) -A"-!) < ° . la recta se traza pasando por/(.t2) y / ( * i ) . La intersección de esta recta con el eje x es:
*3 " *2 " f^f(xl{-f\x,) - 2 5 0 1 0 4 4 ; /<x3> " " 0 0 0 4 281
Puesto que flx3) -Ax2) > 0 pe ro / I ^ ) ~ñ"i) < ° . s e traza la recta que pasa porfixz) y}(jri). La intersección de esta recta con el eje x es:
*4 " *3 - / ( * 3 ) ' * 3 - * 1 - 2 .505947
/ ( * 3 ) - / ( * l ) f{x4)- -0.000197 5.
Para obtener una mayor exactitud, se tiene que calcular la intersección de la recta que pasa por fpr4) y f^x-,) con el eje x. Dado quejlxt) • A'i) > 0 yA'i) • ñ*2> > 0. n 0 s e pueden usar los valores d e / f o j yf{x2).
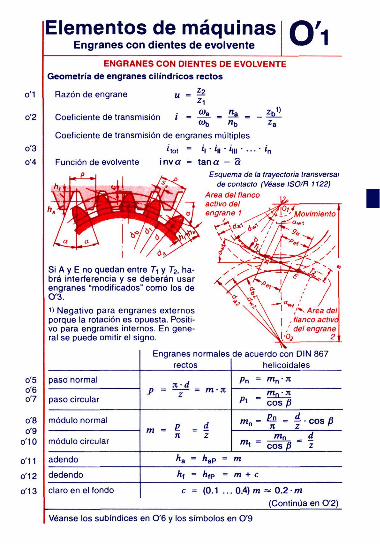
Elementos de máquinas Q ^ F n n r f l n p s r:nn riipntPQ rio p u n l u p n t p ^ ^ Engranes con dientes de evolvente
Razón de engrane
Coeficiente de transmisión
u =
i =
ENGRANES CON DIENTES DE EVOLVENTE Geometría de engranes cilindricos rectos
<«b " b za Coeficiente de transmisión de engranes múltiples
'tot = ' i ' 'ii ' 'ni ' ■ -■ ' 'n Función de evolvente i n v a - t a n a — 3
S Esquema de la trayectoria transversal de contacto (Véase ISO/R 1122)
Área del flanco
Si A y E no quedan entre T\ y T2, habrá Interferencia y se deberán usar engranes "modificados" como los de 0 '3.
') Negativo para engranes externos porque la rotación es opuesta. Positivo para engranes internos. En general se puede omitir el signo.
paso normal
paso circular
módulo normal
módulo circular
adendo
dedendo
claro en el fondo
Engranes normales rectos
P -
m =
Kd — mn
e. d Jt Z
ht¡ m haP "
h, = hIP =
c = (0.1 ..
de acuerdo con DIN 867 helicoidales
Pn "
Pt -
m n =
m, =
m
m + c
0.4) m
mn-3t
m n - j i eos /?
%-i-cose >"„ m d
eos p z
= 0.2 m (Continúa en Q'2)
Véanse los subíndices en 0 '6 y los símbolos en 0 '9
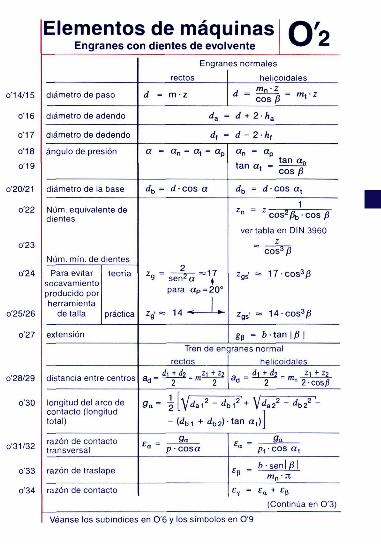
Elementos de máquinas Q'p Engranes con dientes de evolvente ^ ^ ™
Engranes normales
rectos helicoidales
diámetro de paso eos /3
diámetro de adendo d + 2-h,
diámetro de dedendo d-2h,
ángulo de presión a n = tan a, tan g n
eos /?
diámetro de la base d■eos a d■ eos a,
Núm. equivalente de dientes
Núm. mín. de dientes
1 n cos^ f t , ■ eos /3
ver tabla en DIN 3960
Para evitar socavamiento producido por herramienta
detal la
■ — V - = 1 7 sen-^ a ^ para a P = 20°
practica 2„ '= 14
c o s 3 ^
1 4 - e o s 3 fi
extensión g B = 6 - tan | /S |
Tren de engranes normal rectos helicoidales
distancia entre centros 3d ■4* Z1 + Z; " 2
¿1 + 4? ¿1+Z2 2 n2-cos/3
longitud del arco de contacto (longitud total)
9a'
- ( d b 1 + d b 2 ) - t a n a, )
razón de contacto transversal
9a p c o s a Pe eos a ,
razón de traslape b • senl fl |
razón de contacto
(Continúa en 0'3)
Véanse los subíndices en 0'6 y los símbolos en 0'9
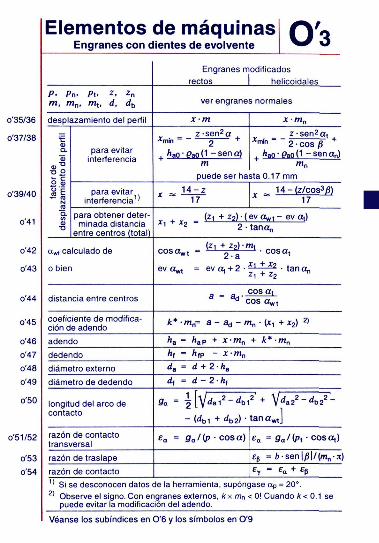
Elementos de máquinas f V q Enaranes con dientes de evolvente ^ ^ O Engranes con dientes de evolvente
Engranes modificados rectos I helicoidales
P. Pn. Pt. 2 . ¿n m, mn, m,, d, d^ ver engranes normales
desplazamiento del perfil
-5°
para evitar interferencia ftao • Pao (1 ~ sen g)
m puede ser hasta 0.17 mm
_ z-sen2a, mín " 2 ■ eos p +
haoPaoO -sengn)
para evitar interferencia 1)
1 4 - z 17
_ 14-(z/cos3ff) 17
para obtener determinada distancia
entre centros (total) *1 + * 2
(z, + z2)-(evavt- evo,) 2 • tanOp
(z, + z2)-m, cosa*, = ' ' • cosa,
= eva t + 2 - f 1 ^ 2 t a n a n z, + z2
aM calculado de
o bien » " w t
distancia entre centros
coeficiente de modificación de adendo
adendo
dedendo
diámetro externo
diámetro de dedendo
longitud del arco de contacto
razón de contacto transversal
razón de traslape
razón de contacto 1} Si se desconocen datos 2* Observe el signo. Con er
puede evitar la modificar
a 3 c o s a< " cos a * ,
k* ■ mn= a - ad - m„ ■ <x, + x2) 2>
K - *«p + x-m„ + k*-mn
h, = / i ( P - xm„
dñ- d + 2 - f t ,
d, - d - 2 • h,
9a = -¿[V<ia12-<<b,2 + Vda22 -db 22 -
£a = 9a'iP ■ cosa) «o - aa'ipfcosa,)
£P = f>-sen|/S|/(mn-n) Ey = £a + £p
je la herramienta, supóngase ap = 20°. granes externos, fexmn<0! Cuando k< 0.1 se ion del adendo.
Véanse los subíndices en 0'6 y los símbolos en 0'9
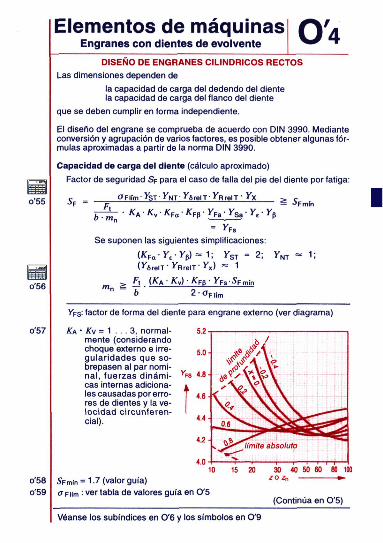
Elementos de máquinas Engranes con dientes de evolvente 0'4
DISEÑO DE ENGRANES CILINDRICOS RECTOS Las dimensiones dependen de
la capacidad de carga del dedendo del diente la capacidad de carga del flanco del diente
que se deben cumplir en forma independiente.
El diseño del engrane se comprueba de acuerdo con DIN 3990. Mediante conversión y agrupación de varios factores, es posible obtener algunas fórmulas aproximadas a partir de la norma DIN 3990.
Capacidad de carga del diente (cálculo aproximado) Factor de seguridad SF para el caso de falla del pie del diente por fatiga:
OFIlm' ^ST YNj y6relT- ^RrelT ' ^X SP -
6 m „ ^A ' Ku ' KF. KÍ YSAY.Y,, = ^Fmfn
VFB' ' F a ' ' S a ' - yFs
Se suponen las siguientes simplificaciones: (K^YtYtf^l; yST = 2; yNT - 1; iYi,en ■ Yfíwn ■ Yx) ~ 1
a f j (KA ' Kv) ' KfB ■ Yf, Sf m ¡ n n = b' 2-of,m
VFS: factor de forma del diente para engrane externo (ver diagrama)
KA • ICv " 1 . . . 3, normalmente (considerando choque externo e irregularidades que sobrepasen al par nominal, fuerzas dinámicas internas adicionales causadas por errores de dientes y la velocidad circunferencial).
5Fmm = 1.7 (valor guía) <r Fiim : ver tabla de valores guia en 0'5
15 20 30 40 50 60 80 100 ZOZn
(Continúa en 0'5)
Véanse los subíndices en Q'6 y los símbolos en 0'9
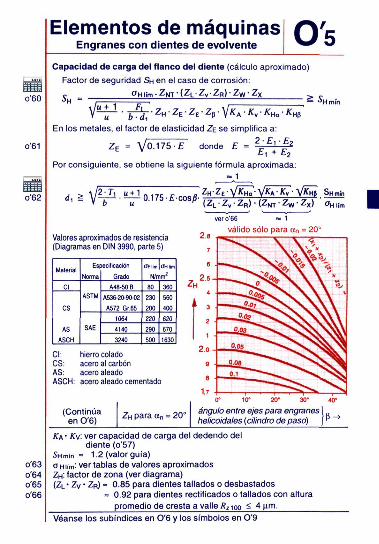
Elementos de máquinas Engranes con dientes de evolvente O's
Capacidad de carga del flanco del diente (cálculo aproximado)
Factor de seguridad SH en el caso de corrosión:
Q"H lím ■ ZNT ' ( Z L - Z v ■ Z R ) ■ Z w Zx
•V«A ^ w ' ^ H n ' ^M
* H = - 7 = i
\~¡¡~ ' ftT¿7 ' Z H • Z E • Z E ' Z 8 ' V * A ' * » ' *Ha
En los metales, el factor de elasticidad ZE se simplifica a:
2 ■ Ei ■ E2
— ^Hmín
H(J
Z E = y o . 1 7 5 £ donde E E l
Por consiguiente, se obtiene la siguiente fórmula aproximada: - 1
<,*V 2-r, B+1 O.175-£-cos0- ZH-Ze-V^iü'-V^A-K.'-VgHr? Sm,
Valores aproximados de resistencia (Diagramas en DIN 3990, parte 5)
(Z L • Z v ■ Z R ) • (Z^T • Z w • Z x ) OH|Im
vero'66 ~ 1 válido sólo para an = 20°
Material
Cl
CS
AS
ASCH
Es
Norma
ASTM
SAE
educación
Grado
A48-50 B
A536-20-9CW2
A572 Gr.65
1064
4140
3240
OTlim|oHllm
N/mm !
80 230
200
220 290 500
360 560
400
620 670 1630
Cl: hierro colado CS: acero al carbón AS: acero aleado ASCH: acero aleado cementado
(Continúa en Q'6)
Z H para a„ = 20° ángulo entre ejes para engranes 1 helicoidales (cilindro de paso) J ^ "
Kn- Kv: ver capacidad de carga del dedendo del diente (o'57)
SHmín - 1.2 (valor guía) o HhW ver tablas de valores aproximados ZH: factor de zona (ver diagrama) (ZL • Z V • ZR) ■= 0.85 para dientes tallados o desbastados
■ 0.92 para dientes rectificados o tallados con altura promedio de cresta a valle R2 IQQ < 4 pm.
Véanse los subíndices en 0'6 y los símbolos en 0 '9
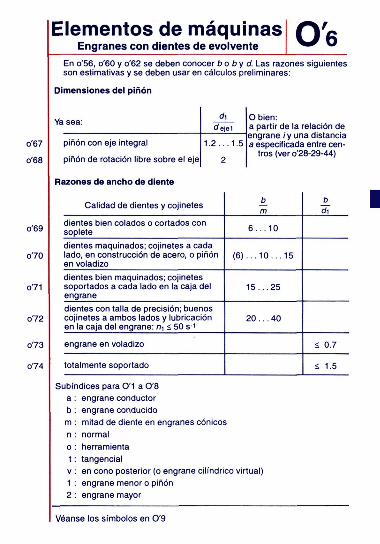
Elementos de máquinas Q ' f i Fnnranac r o n HipntPQ rio punfupnto ^ ^ " Engranes con dientes de evolvente
En o'56, o'60 y o'62 se deben conocer b o b y d. Las razones siguientes son estimativas y se deben usar en cálculos preliminares:
Dimensiones del p iñón
Ya sea:
piñón con eje integral
piñón de rotación libre sobre el eje
Razones de ancho de diente
di deje!
1 .2 . . . 1.5
2
O bien: a partir de la relación de engrane /'y una distancia a especificada entre cen
tros (ver o'28-29-44)
Calidad de dientes y cojinetes
dientes bien colados o cortados con soplete
dientes maquinados; cojinetes a cada lado, en construcción de acero, o piñón en voladizo
dientes bien maquinados; cojinetes soportados a cada lado en la caja del engrane
dientes con talla de precisión; buenos cojinetes a ambos lados y lubricación en la caja del engrane: ni < 50 s-1
engrane en voladizo
totalmente soportado
b_ m
6 . . . 1 0
( 6 ) . . . 1 0 . . . 15
1 5 . . . 25
20 . . . 40
b di
< 0.7
< 1.5
Subíndices para 0'1 a 0 '8 a : engrane conductor b : engrane conducido
m : mitad de diente en engranes cónicos n : normal
0 : herramienta t : tangencial v : en cono posterior (o engrane cilindrico virtual) 1 : engrane menor o piñón 2 : engrane mayor
Véanse los símbolos en 0'9
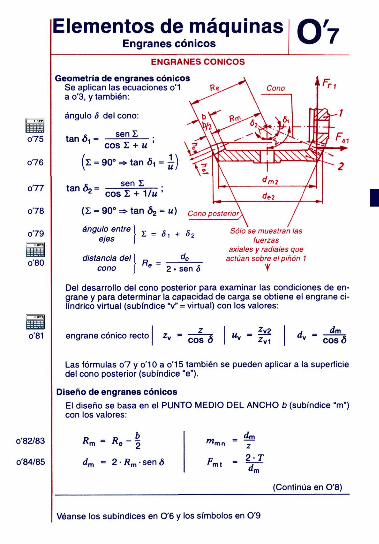
Elementos de máquinas I Q ' 7 E n n r a n e s c ó n i c o s ^ ^ ' Engranes cónicos
ENGRANES CÓNICOS
Geometría de engranes cónicos Se aplican las ecuaciones o'1 a o'3, y también:
ángulo 5 del cono:
sen I tan <5, = eos L + u
( z = 90° => tan ó , - j¡
tan ó. sen X 2 eos I + 1/u '
( I - 90° ==• tan ó 2 = u)
ángulo entre ejes
distancia del cono
I = <5, + S2
R. = 2 • sen ¿>
Sólo se muestran las fuerzas
axiales y radíales que actúan sobre el piñón 7
Y
Del desarrollo del cono posterior para examinar las condiciones de engrane y para determinar la capacidad de carga se obtiene el engrane cilindrico virtual (subíndice V = virtual) con los valores:
engrane cónico recto z v S "• 2v2 2.1 <¿v = COSO
Las fórmulas o'7 y o'10 a o'15 también se pueden aplicar a la superficie del cono posterior (subíndice "e").
Diseño de engranes cónicos El diseño se basa en el PUNTO MEDIO DEL ANCHO b (subíndice "m") con los valores:
dm = 2 K m s e n < 5 v - 2 - T f m l - -j—
(Continúa en 0'8)
Véanse los subíndices en 0'6 y los símbolos en 0 '9
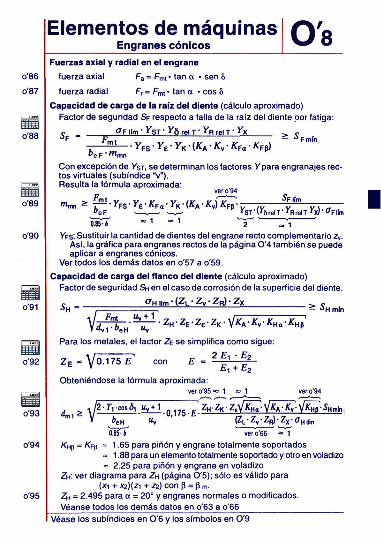
Elementos de máquinas Q' f i Engranes cónicos ^ ^ * *
Fuerzas axial y radial en el engrane
fuerza axial Fa = Fmt • tan a • sen 8
fuerza radial F, = Fml • tan a • eos 8
Capacidad de carga de la raíz del diente (cálculo aproximado) Factor de seguridad SF respecto a falla de la raíz del diente por fatiga:
S » Q"Fllm" ^ST' y6re!T" ^RrelT' ^X > £
T — ® - — I ' F S • y E • YK ■ ( * * ■ * v • Kfa ■ Kf() " ! F , m m n
Con excepción de VST, se determinan los factores Vpara engranajes rectos virtuales (subíndice V ) . Resulta la fórmula aproximada:
ver o 94 mmn - 7 YFS' YE' K F „ • YK ■ {KA ■ Kw) KF« ■ - — - —
° e F ' . ■ ^ - v r S T ' l ' 6 r e l T ' r R r e l T ' W ' t ' F I « lím ■ 1 - 1 0.85-6 « i = « i 2 _ 1
VFS: Sustituir la cantidad de dientes del engrane recto complementario zv. Asi, la gráfica para engranes rectos de la página 0 '4 también se puede aplicar a engranes cónicos.
Ver todos los demás datos en o'57 a o'59.
Capacidad de carga del flanco del diente (cálculo aproximado) Factor de seguridad S» en el caso de corrosión de la superficie del diente.
c OH llm • ( Z L ' Zy • Z R ) ' Z X ssi Vj .£ ¡ T - ' Z H ' Z E " Z C ' Z K - V ^ A ^ V ' ^ H O ^ H P
Para los metales, el factor ZE se simplifica como sigue:
Z E - V o . 1 7 5 E ' con E - 2 £ l ' f2
Obteniéndose la fórmula aproximada: ver 0'95 = 1 =* 1 ver 0'94
Hmfn
*eH «v
r Z H Z K , Z t V * W V * A , * W * H f r S H m l n i
U>''*'fc S T -7 \ V ~
0.85 - 6 vero'66 « t
KHP = KFP « 1.65 para piñón y engrane totalmente soportados = 1.88 para un elemento totalmente soportado y otro en voladizo = 2.25 para piñón y engrane en voladizo
Z H : ver diagrama para Z H (página 0'5); sólo es válido para (X1 + X2>(Zl + Z2> COn P = P m.
ZH = 2.495 para a = 20° y engranes normales o modificados. Véanse todos los demás datos en o'63 a o'66
Véase los subíndices en 0 '6 y los símbolos en 0'9
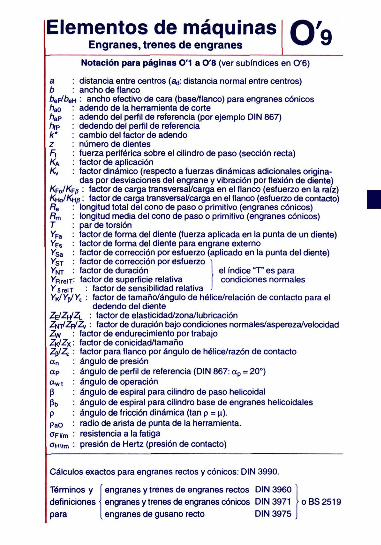
Elementos de máquinas Q ' Q Engranes, trenes de engranes ^ ^ **
Notación para páginas O'l a 0'8 (ver subíndices en 0'6)
a : distancia entre centros (a<j: distancia normal entre centros) b : ancho de flanco befJben : ancho efectivo de cara (base/flanco) para engranes cónicos bao : adendo de la herramienta de corte bap : adendo del perfil de referencia (por ejemplo DIN 867) bfp : dedendo del perfil de referencia k' : cambio del factor de adendo z : número de dientes F¡ : fuerza periférica sobre el cilindro de paso (sección recta) KA : factor de aplicación /Cv : factor dinámico (respecto a fuerzas dinámicas adicionales origina
das por desviaciones del engrane y vibración por flexión de diente) KfJKfp '■ factor de carga transversal/carga en el flanco (esfuerzo en la raíz) KHJKHP '■ factor de carga transversal/carga en el flanco (esfuerzo de contacto) Re : longitud total del cono de paso o primitivo (engranes cónicos) f?m : longitud media del cono de paso o primitivo (engranes cónicos) T : par de torsión Vi a : factor de forma del diente (fuerza aplicada en la punta de un diente) yFs : factor de forma del diente para engrane externo Vsa : factor de corrección por esfuerzo (aplicado en la punta del diente) VST : factor de corrección por esfuerzo VNT : factor de duración VRreiT: factor de superficie relativa Ys,en : factor de sensibilidad relativa YO/Yf/Y, : factor de tamaño/ángulo de hélice/relación de contacto para el
dedendo del diente Zt/Z^Z\_ : factor de elasticidad/zona/lubricación ZmtZf/Z,: factor de duración bajo condiciones normales/aspereza/velocidad
el índice "T" es para condiciones normales
Z\N ZK/ZX
«n Ctp «wt P Pb P PaO OFIÍm OHHm
factor de endurecimiento por trabajo factor de conicidad/tamaño factor para flanco por ángulo de hélice/razón de contacto ángulo de presión ángulo de perfil de referencia (DIN 867: ap = 20°) ángulo de operación ángulo de espiral para cilindro de paso helicoidal ángulo de espiral para cilindro base de engranes helicoidales ángulo de fricción dinámica (tan p = u). radio de arista de punta de la herramienta. resistencia a la fatiga presión de Hertz (presión de contacto)
Cálculos exactos para engranes rectos y cónicos: DIN 3990.
Términos y definiciones para
engranes y trenes de engranes rectos DIN 3960 l engranes y trenes de engranes cónicos DIN 3971 > o BS 2519 engranes de gusano recto DIN 3975 J

Análisis de esfuerzos p(* Acciones combinadas
Estado de esfuerzo en tres dimensiones
La configuración general de los esfuerzos puede sustituirse por los:
P'1
P'2
P'3
p'4
p'5
p'6
Esfuerzos principales au a2. 03 que son las soluciones de la ecuación
6 - S C ' t S-6-T ' 0
donde R = 6, + 6y * 62
S = 6, ó, + úr 62 * 6z ó, - T,2-Tr/-Tj T = 6,b16!*2T,fTy!T!r6,Tyz'-6yTz,1-6¡r,}
La ecuación cúbica se resuelve como sigue:
La fórmula p'1 se iguala a y (en vez de a 0), y así y - fía) se gráfica. Los puntos de intersección con el eje o linea cero dan la solución.Tales valores se sustituyen en p'1 y se obtienen valores más exactos por ensayo e interpolación.
El caso en que a, > o2 > a3 da el esfuerzo cortante máximo Tmax = 0.5 «7, - <73)
Flexión y torsión en ejes o árboles de sección circular
Según la teoría de la energía máxima de deformación:
P'7
Esfuerzo equivalente: 6 , . » y0¡2+ 3 ( a 0 - X,)2 ■$ cV(pe,m.)
Momento equivalente: ñe » 1 / K2+ 0.75(<>o- T)
Para determinar el diámetro del eje se calcula el módulo de sección s necesario a partir de
esfuerzo flexional de tensión esfuerzo cortante torsionat momento flexionante (o flector) momento torsionante (o torsor) se calcula según P'2
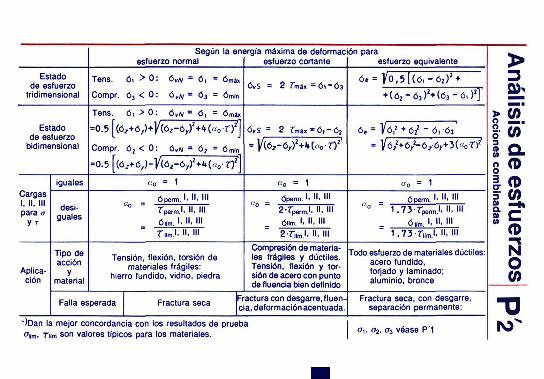
Según la energía máxima de deformación para esfuerzo normal esfuerzo cortante esfuerzo equivalente
Estado de esfuerzo
tridimensional
Tens. ó. > 0
Compr. 63 < 0 6vN " Ó, - Orna»
6\iN ~ 63 = Ómln 6»S = 2 Tmáx = 6 l - Ó 3
6.= Vo,5[(6, -62)2 + + (6 2 -ó 3 ) 2 + (c53-6, ) 2 ] '
Tens. ó 1 > 0 Estado
de esfuerzo bidimensional
6VN = 6, = Ómax
=0.5 [(ó?+ó,)+V(óz-ó),)2+'t(«or)2']
Compr. ó2 < 0: 6 „N = ó2 = ómm
=0.5 [(ó^ó^-Vtó^-ó^+^íao- D2'
ÓvS - 2 Tmíx • 61 - Ó2
= V(6^-ó/)2+*(«cr)2'
6e= VcV + 6¡! " Ó, 62
Vó/+ó/2-6y6r+3(«or)í
Cargas I, II. III para a
y r
iguales
desiguales
Ó perm. Óperm. I, II, III Tperm.l. ». I" ónm. '■ "■ III r«m.'. 11. i»
2 ' W I , II. "I &lm. I. I'. I" 2 Tumi, II, III
6 perm. *■ *'»
1 . 7 3 r p e r m . l . II.
i .73-r„m . i . ii. i
Aplicación
Tipo de acción
y material
Tensión, flexión, torsión de materiales frágiles:
hierro fundido, vidrio, piedra
Compresión de materiales frágiles y dúctiles. Tensión, flexión y torsión de acero con punto de fluencia bien definido
Todo esfuerzo de materiales dúctiles: acero fundido, forjado y laminado; aluminio, bronce
Falla esperada Fractura seca Fractura con desgarre.fluen-cia, deformación acentuada.
Fractura seca, con desgarre, separación permanente:
*)Oan la mejor concordancia con los resultados de prueba °iim. ruin son valores típicos para los materiales. o,, a2, a3 véase P'l
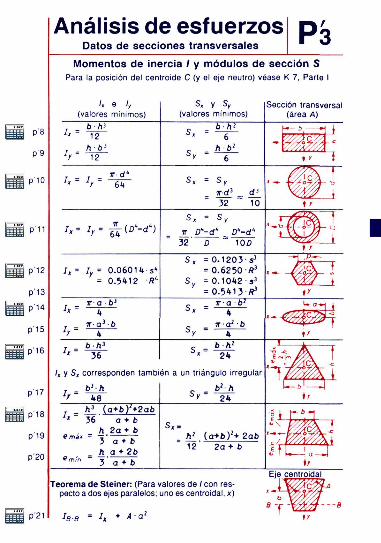
Análisis de esfuerzos Datos de secciones transversales P3
Momentos de inercia / y módulos de sección S Para ia posición del centroide C (y el eje neutro) véase K 7, Parte I
/, e 1, (valores mínimos)
bh3
h - 12 h b3
lY 12
* / 64
'*" h - Jt{DU-á")
lx= Iy= 0 . 06014 -s 4
» 0.5412 fi'
ir a ■ b1
h ;, > r - g 3 b
'y k
. bh3
h~ 36 / , y S, corresponden tamb
, b 3 ^ . 'y 48
A3 (a+b)'+2ab * 36 o + b
/i 2a + b 3 a + b /i g + 2b
"""" 3 g + b
Teorema de Steiner: (Para \
S, y Sy
(valores mínimos)
i « " 6 mh-b>
*y 6
Sx = Sy ird3 _ d3
32 10
TT 0 * - d * D ' - d 4
32 0 100
S x = 0 . 1 2 0 3 - ^ = 0 .6250 ft3
S y = 0 .1042 s3
^ 0 . 5 4 1 3 - t f 3
7T-g b2
4 " 4 „ ira'b ay 4
<; b h' = > x " 2 i (
én a un triángulo irregular
V 24
_ A2 ( g + b ) 2 + 2 a b 12 2g + b
alores de / con res-
Sección transversal (área A)
-I T " * J — 1 * * & -
t » i
ir
í - f r l - o -M— Q
♦ 1-
»'
»'
ir
^ b ♦/ ""
Eje centroidal 4
pecto a dos ejes paralelos; uno es centroidal, x)
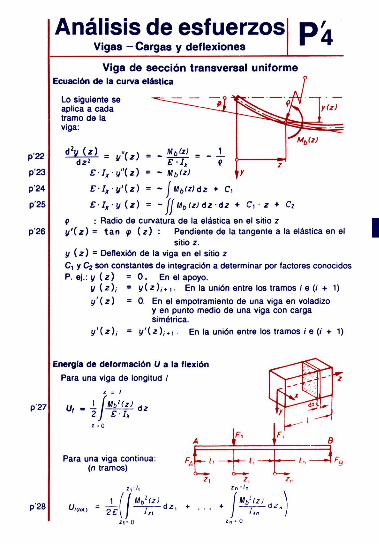
Análisis de esfuerzos Vigas - Cargas y deflexiones P4
Viga de sección transversal uniforme Ecuación de la curva elástica
Lo siguiente se aplica a cada tramo de la viga:
d2y ( z ) dz*
EJ„y"{z)
!/"(*)
EIxy(z)
Mb(z) _ _1_ "TTj, ~ v - Mb'z)
~ ¡Mb(z)iz + Ci - IÍMb(z)Az-Az * C,- z * C2
f : Radio de curvatura de la elástica en el sitio 2 \/'{z)- t a n <f ( z ) : Pendiente de la tangente a la elástica en el
sitio z. y ( z ) - Deflexión de la viga en el sitio z C, y C2 son constantes de integración a determinar por factores conocidos P. e j . : y ( z ) = 0 . En el apoyo.
y ( z ) , = í í ( z ) , + , . En la unión entre los tramos i e (i + 1) y'(z) = 0 . En el empotramiento de una viga en voladizo
y en punto medio de una viga con carga simétrica.
y ' ( z ) , " Sí ' (z) , + i . En la unión entre los tramos i e (i + 1)
Energía de deformación U a la flexión
Para una viga de longitud / z ■ /
., 1 íu¿(z) u' - 2j-£-7T
dz
Para una viga continua: (n tramos)
.. 1 ( ( Mb'<Z) u'"°" ' 2E\) A, '
i r - 'i —|— • /„—-íf8
Z n - ' n
üí!í£¿
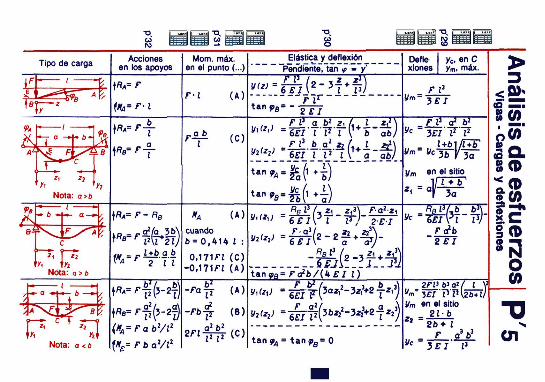
■ o
Tipo de carga Acciones en los apoyos
Mom. máx. en el punto (...)
Elástica y deflexión Pendiente, tan » - y'
6 £ / r 5 i i"J
Defle- yc, en C xlones ym. máx.
%— r-i ( A )
y(z>
t a n p B Fj1
2EI
y m = 3 C J
Fl3 a V ZiL.l *?\ ' 6EI l ~P l V & a o /
:£JÍ.±.<ií.fi(1+i_i¿\ 6/7 ! I 2 ¡ V a a o /
¥ff - r o - M - 4 - % r*± (O tf,te,J
y 2 r z , j
Ve
_ i + 6 ! / m - y c 3 ¿ -
Nota: a>¡>
tan ^
tan 9g,
■feK) ■ffcK)
y m en el sitio I l + b' ' 3a
»>« kF^A?
■■F-RB
Nota: a>b
\*A'
*«<>=/• 75(7+57)
«."'" ¥f!
*4 ( A )
cuando 6 = 0 , 4 1 4 l :
0 ,171 / " ! (C ) - 0 , 1 7 1 / - ! ( A )
yi(zt>
F-a*-¡ 2E-I
tan yg
e/r /Vi F /
F & i ! . r i _ . j Ü ; / ' a 2 b / ( 4 g / t )
Ve S í / / ■ ¿ o
" 2 £ í
6 b3\
t>3g'/ t V V'VKJbTl)
1 7 " «U Nota: o < 6
(*„=/• a 6 2 / I 2
f>£= /• 6 a2 /!2
-/•afj (A)
2/"!
!' a2 o I2 I
( B )
vitei;
V2fi2J
F& 6EJ
P-(3a^-3^8|í,3)
6£J
2fP Vm 3 £ / Vm en el sitio
2 1 - 6
t a n <pA - t a n j > s = 0
22
Ve ■
26+ i F a3b3
-¡El l3
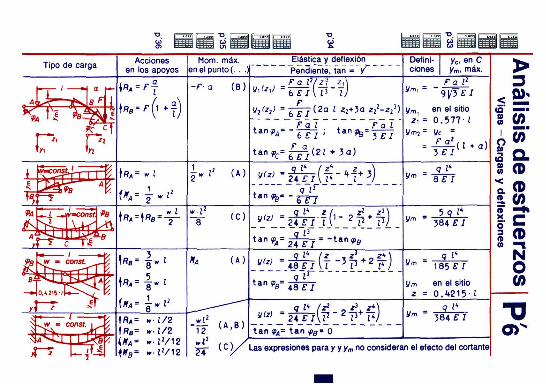
Tipo de carga Acciones en los apoyos
Mom. máx. _ Elástica y deflexión en el punto (. . .i'~ Pendiente, tan = y~
Definiciones
Ve. «n C ym, máx.
""7 (B) , , Fa p?£j z,\
f V,(z2> = ^ J 7 < 2 a ¡ *2+3° *22-¿23) . _~ £ÓJ ~ ~ ~F~a 1 ' tan^-"6T7 ; t a n%=T77 tan j t=£¿(2¡ + 3a)
Vm'= ~tfTFi ym en el sitio
í i = 0.577-1 Vm2= Ve -
. -ÍL2Í(l + a) 3 C /
"HT?
fflx=»t (A) yízJ Vm - 8£T7
t a n % = - f£ ♦a.-tflB-V- =£ fO vw =
- <?'4
24 f/ I ( 1 - 275 + 7*j ¿31 i3
- s q ' 4
384 El t a n ^ = 2 4 £ r 7 " t a n i g f l
fffa- 8 (A) ""-tóíf->£♦'£) t a n a <7¡J
8 48 f j
_ q i* V m 185 E I
ym en el sitio z = 0 .4215- i
♦ AA= » ! / 2 TflB= »"¡ /2 <#,,= w■l'/^2 (ffs= w l V 1 2
yo; = q I* /¿ .
2 4 r / V ¡ í frf) q ¡" 384 £ f
tan tpA= tan ?ff« o Las expresiones para y y ym no consideran el efecto del cortante
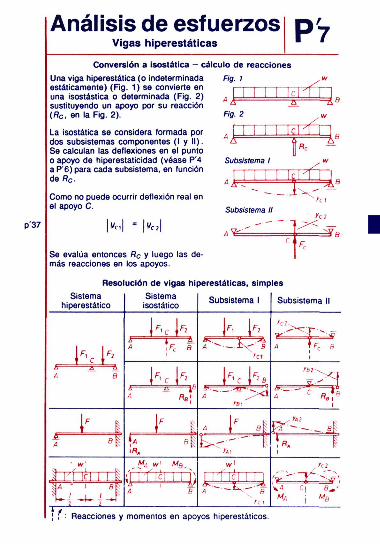
Análisis de esfuerzos Vigas hiperestáticas P7
I I I I I d -
Conversión a isostática - cálculo de reacciones Una viga hiperestática (o indeterminada Fig. 1 estáticamente) (Fig. 1) se convierte en |—r-una isostástica o determinada (Fig. 2) A L-L sustituyendo un apoyo por su reacción " (Re. en la Fig. 2). Fig. 2
La isostática se considera formada por dos subsistemas componentes (I y II). Se calculan las deflexiones en el punto o apoyo de hiperestaticidad (véase P'4 a P'6) para cada subsistema, en función de Hc-
Como no puede ocurrir deflexión real en el apoyo C.
*¿r ,-, ,
II.
Subsistema II
ia
3h
Se evalúa entonces Rc y luego las demás reacciones en los apoyos.
Resolución de vigas hiperestáticas, simples
K..2ÜIEÍL iSSSüü, Subsistema I Subsis hiperestático isostático
Jvl: < "/> e
F.
¡rrc £ F'c
» - ^ . _ . - p ^ l *
>a
4 L_l ' :: §1
■3~H ici i i I
C C%3 *"/ ¡ i : Reacciones y
momentos en apoyos hiperestáticos.
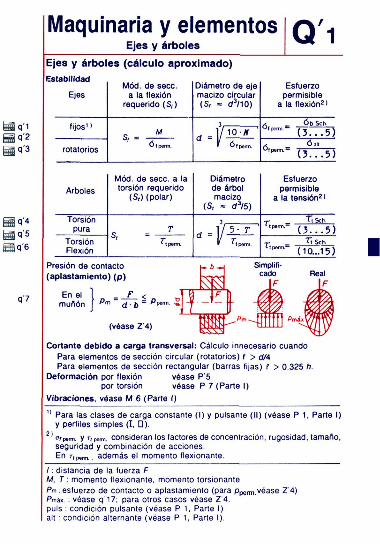
Maquinaria y elementos Ejes y árboles Qi
Ejes y árboles (cálculo aproximado) Estabilidad
Ejes Mód. de secc.
a la flexión requerido (S f)
Diámetro de eje macizo circular (S, * d3/10)
Esfuerzo permisible
a la flexión2 '
fijos1
S, = rotatorios ' O f berra
ÓbSch
(37TD ( 3 . . . 5 )
Arboles
Torsión pura
Torsión Flexión
Mód. de secc. a la torsión requerido
(S,) (polar)
T r,
Diámetro de árbol macizo
(S, - d3/5)
' l t penn .
Esfuerzo permisible
a la tensión2 >
T Tisch '-""- ( 3 . . . 5 )
r Tt Sch , p e m (10. . .15)
Presión de contacto (aplastamiento) (p)
n el 1 _ _F_ < jñón j Pm d ■ b =
Ei muñón
(véase Z'4)
Cortante debido a carga transversal: Cálculo innecesario cuando Para elementos de sección circular (rotatorios) f > d/4 Para elementos de sección rectangular (barras fijas) f > 0.325 h.
Deformación por flexión véase P 5 por torsión véase P 7 (Parte I)
Vibraciones, véase M 6 (Parte I)
" Para las clases de carga constante (I) y pulsante (II) (véase P 1, Parte I) y perfiles simples (I , D).
2 t orpemi. y Típerm, consideran los factores de concentración, rugosidad, tamaño. seguridad y combinación de acciones. En Típem,., además el momento flexionante.
/ : distancia de la fuerza F M, T : momento flexionante, momento torsionante Pm : esfuerzo de contacto o aplastamiento (para pperm.véase Z'4) Pmáx. : véase q'17; para otros casos véase Z'4. puls : condición pulsante (véase P 1, Parte I) alt : condición alternante (véase P 1, Parte I).
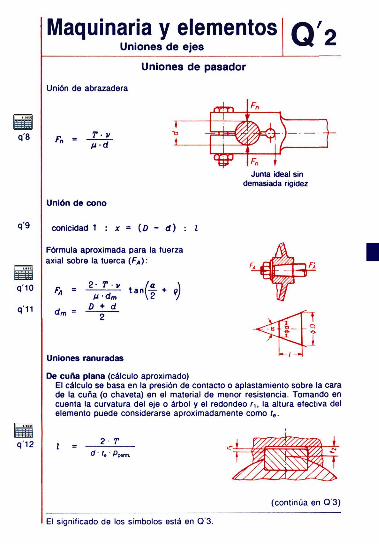
Maquinaria y elementos Uniones de ejes Q2
Uniones de pasador
Unión de abrazadera
F„ - T • v lid
Junta ideal sin demasiada rigidez
Unión de cono
conicidad 1 (O - d) : l
Fórmula aproximada para la fuerza axial sobre la tuerca (FA):
dm -
2- T y t¿-dm
D + d t . -(f * 9)
Uniones ranuradas
De cuña plana (cálculo aproximado) El cálculo se basa en la presión de contacto o aplastamiento sobre la cara de la cuña (o chaveta) en el material de menor resistencia. Tomando en cuenta la curvatura del eje o árbol y el redondeo r,, la altura efectiva del elemento puede considerarse aproximadamente como („.
2 T di,P„
(continúa en Q'3)
El significado de los símbolos está en Q'3.
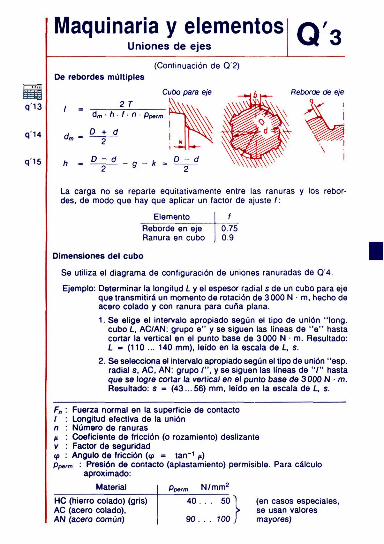
Maquinaria y elementos Uniones de ejes Q'3
De rebordes múltiples
2T I
<¡m =
Reborde de eje 9 .
<¡m ■ h ■ f ■ n ■ Ppgrm
D 2
D - d g - K
La carga no se reparte equitativamente entre las ranuras y los rebordes, de modo que hay que aplicar un factor de ajuste f:
Elemento Reborde en eje Ranura en cubo
0.75 0.9
Dimensiones del cubo
Se utiliza el diagrama de configuración de uniones ranuradas de 0 4 .
Ejemplo: Determinar la longitud L y el espesor radial s de un cubo para eje que transmitirá un momento de rotación de 3 000 N - m, hecho de acero colado y con ranura para cuña plana.
1. Se elige el intervalo apropiado según el tipo de unión "long. cubo L, AC/AN: grupo e" y se siguen las lineas de " e " hasta cortar la vertical en el punto base de 3 000 N - m. Resultado: L ■ (110 ... 140 mm), leído en la escala de L, s.
2. Se selecciona el intervalo apropiado según el tipo de unión "esp. radial s, AC, AN: grupo / " , y se siguen las líneas de " / " hasta que se logre cortar la vertical en el punto base de 3000 N - m. Resultado: s - (43...56) mm, leído en la escala de L, s.
F„: Fuerza normal en la superficie de contacto / : Longitud efectiva de la unión n : Número de ranuras ¡L : Coeficiente de fricción (o rozamiento) deslizante v : Factor de seguridad <p : Ángulo de fricción (<p = tan - 1 p) Pperm. Presión de contacto (aplastamiento) permisible. Para cálculo
aproximado:
Material
HC (hierro colado) (gris) AC (acero colado), AN (acero común)
Pee,,, N/mmz
40 . . . 50
9 0 . . . 100
(en casos especiales, se usan valores mayores)
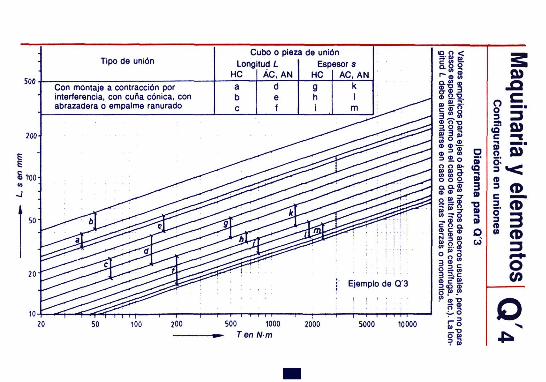
' 0
200-
i §100-w J
i 50-
20-
2
Tipo de unión
Con montaje a contracción por interferencia, con cuña cónica, con abrazadera o empalme ranurado
-^^S^í^^^ ^—"^^""^Sr—"^Z-^^Z^í
1 *T 'T V i i i i 1 1 i — 0 50 100 200
Cubo o pieza de unión Longitud L
HC a b c
AC, AN d e f
^^!ÍC¡TZZ^Z-'
' . ' ' . :
500 1000 T e>n Nm
Espesor s HC
g h i
AC, AN k I
m
—X*^fj£<^^^^^ I <^^^^^
; ^ ^
i ■ ¡ :
■ i i ■ ■
i Ejemplo de Q'3 t '
I I . : ; . ; ;
"9. S <
SI m 0 ! lif
ü! sss i i °"S l i s I I I | «8 psi ^ O ! ! | I I f I 1 1 .
2000 5000 10000 [ J o _ T 3 o w ? 5
I i ! 8
■*■
ES Q)
X» « c p —■ § 3 £ 0> c - * iay
ración e elem
n unione
3 •-»■ O (0
o w .# >
4*
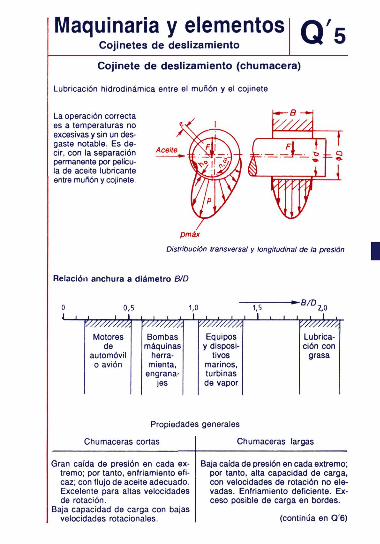
Maquinaria y elementos Cojinetes de deslizamiento Q.5 Cojinete de deslizamiento (chumacera)
Lubricación hidrodinámica entre el muñón y el cojinete
La operación correcta es a temperaturas no excesivas y sin un desgaste notable. Es decir, con la separación permanente por película de aceite lubricante entre muñón y cojinete.
pmáx
Distribución transversal y longitudinal de la presión
Relación anchura a diámetro B/D
0,5 1,0
y/////////, Motores
de automóvil
o avión
////////A Bombas
máquinas herra
mienta, engrana
jes
y/////////, Equipos
y dispositivos
marinos, turbinas de vapor
1,5 I
-B/D 2,0
Lubricación con
grasa
Propiedades generales
Chumaceras cortas Chumaceras largas
Gran caída de presión en cada extremo; por tanto, enfriamiento eficaz; con flujo de aceite adecuado. Excelente para altas velocidades de rotación.
Baja capacidad de carga con bajas velocidades rotacionales.
Baja caída de presión en cada extremo; por tanto, alta capacidad de carga, con velocidades de rotación no elevadas. Enfriamiento deficiente. Exceso posible de carga en bordes.
(continúa en Q'6)
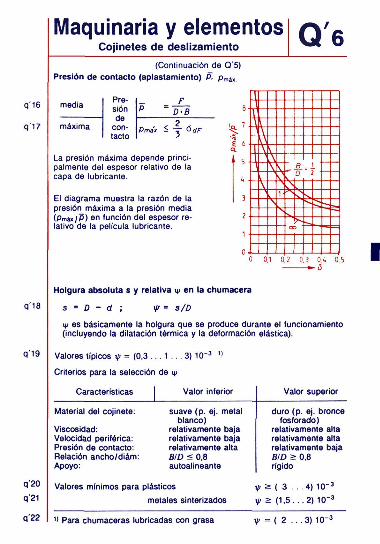
Maquinaria y elementos Cojinetes de deslizamiento Q'6
(Continuación de Q'5) Presión de contacto (aplastamiento) P, pmáx
media
máxima
Presión de
contacto
p
Pmáx
= <
F D-B 2 .
La presión máxima depende principalmente del espesor relativo de la capa de lubricante.
El diagrama muestra la razón de la presión máxima a la presión media (Pmáx/P) en función del espesor relativo de la película lubricante.
Holgura absoluta s y relativa v en la chumacera
s - D - d ; y - s/D
y es básicamente la holgura que se produce durante el funcionamiento (incluyendo la dilatación térmica y la deformación elástica).
Valores típicos v = (0.3 . . . 1 . . . 3) 10"3 "
Criterios para la selección de y
I 8-J
f . ^ J C > \ 1 6.^Ú . -* I k . ■ s - \ \ . {
<•■ t- w \ £>
3 - S-1 5
o a
0 0,1 0,2
í . 1
0,3 0.4 0.5
Características
Material del cojinete:
Viscosidad: Velocidad periférica: Presión de contacto: Relación ancho/diám: Apoyo:
Valor inferior
suave (p. ej. metal blanco)
relativamente baja relativamente baja relativamente alta BID £ 0,8 autoalineante
Valor superior
duro (p. ej. bronce fosforado)
relativamente alta relativamente alta relativamente baja BID => 0.8 rígido
Valores mínimos para plásticos
metales sinterizados
( 3 . 4 ) 1(T3
: ( 1 , 5 . . . 2) 10"3
" Para chumaceras lubricadas con grasa V = ( 2 . . . 3 ) 1 0 " 3
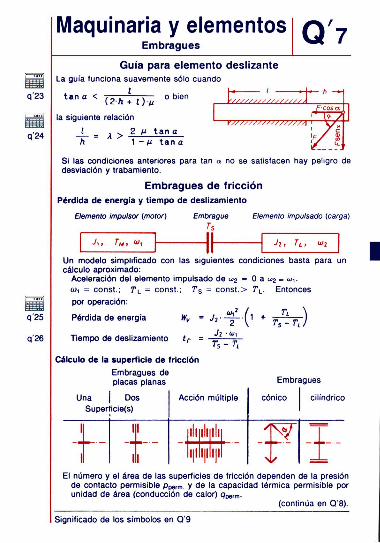
Maquinaria y elementos Embragues Q'7
Guía para elemento deslizante La guia funciona suavemente sólo cuando
t an o < / - . — T Í — o bien
la siguiente relación
J- - i > 2 - t a n -h 1 - M tan a
* / ^ F-cos a
1 [9- /
Si las condiciones anteriores para tan a no se satisfacen hay peligro de desviación y trabamiento.
Embragues de fricción Pérdida de energía y tiempo de deslizamiento
Elemento impulsor (motor) Embrague Elemento Impulsado (carga)
A, J-l, TL, w2
Un modelo simplificado con las siguientes condiciones basta para un cálculo aproximado:
Aceleración del elemento impulsado de o>2 « 0 a (ü, = const.; TL = const.; Ts = const.> TL. Entonces por operación:
Pérdida de energía W„ = Jr^-h + T i T )
Tiempo de deslizamiento tr '
Cálculo de la superficie de fricción Embragues de
Ji -u,
placas planas
Una | Dos Superficie(s)
1
1
1
1
1
1
Acción múltiple
-lll
'1' lll
'1' lll
'1' —-
Embrague:
cónico 1 cilindrico
\ —
El número y el área de las superficies de fricción dependen de la presión de contacto permisible Ppo,m y de la capacidad térmica permisible por unidad de área (conducción de calor) qx,„.
(continúa en Q'8).
Significado de los símbolos en Q'9
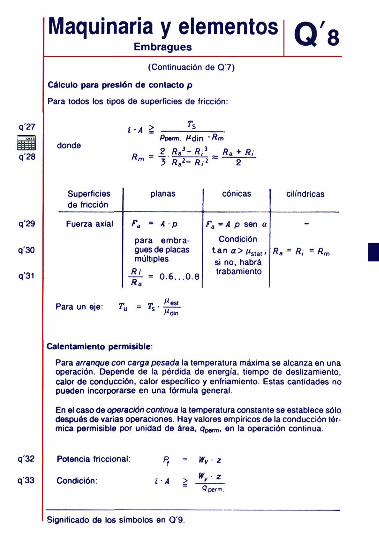
Maquinaria y elementos Embragues Q'8
(Continuación de Q7)
Cálculo para presión de contacto p
Para todos los tipos de superficies de fricción:
i-A
Rm ~
Pperm. /¿din ' Rm
1 Ka3- «,3 «a «,-3 «a 2 - S ; !
Superficies de fricción
planas cónicas cilindricas
Fuerza axial fa = A p para embragues de placas múltiples
« a = 0 .6 . . .0 .8
Fa=Ap sen c
Condición t a n a > / i s t a t l
si no, habrá trabamiento
«a = R, ■ fl„
Para un eje: n, = rs
Calentamiento permisible:
Para arranque con carga pesada la temperatura máxima se alcanza en una operación. Depende de la pérdida de energía, tiempo de deslizamiento, calor de conducción, calor específico y enfriamiento. Estas cantidades no pueden incorporarse en una fórmula general.
En el caso de operación continua la temperatura constante se establece sólo después de varias operaciones. Hay valores empíricos de la conducción térmica permisible por unidad de área, qp,¡,m, en la operación continua.
Potencia friccional:
Condición:
p, i-A
= >
W,
wv <7p
z
z 3rm
Significado de los símbolos en Q 9.
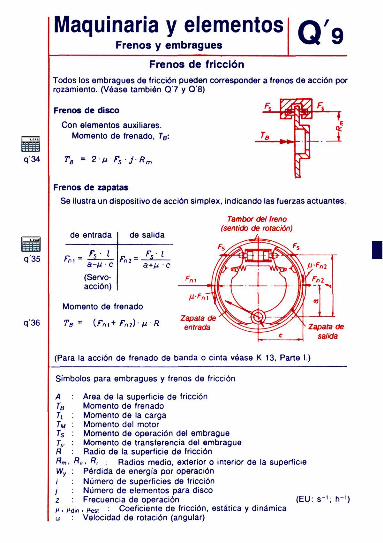
Maquinaria y elementos Frenos y embragues Q'9
Frenos de fricción Todos los embragues de fricción pueden corresponder a frenos de acción por rozamiento. (Véase también 0 7 y Q'8)
Frenos de disco
Con elementos auxiliares. Momento de frenado, TB:
r Frenos de zapatas
Se ilustra un dispositivo de acción simplex, indicando las fuerzas actuantes.
Tambor del freno (sentido de rotación)
de entrada
Fm a-uc (Servo-acción)
de salida
a+¿¿ ■ c
Momento de frenado
TB ' (r„,+ F„,)n R Zapata de entrada Zapata de
_| salida
(Para la acción de frenado de banda o cinta véase K 13, Parte I.)
Símbolos para embragues y frenos de fricción
Área de la superficie de fricción Momento de frenado Momento de la carga Momento del motor Momento de operación del embrague Momento de transferencia del embrague Radio de la superficie de fricción
" a , R, ; Radios medio, exterior o interior de la superficie Pérdida de energía por operación Número de superficies de fricción Numero de elementos para disco Frecuencia de operación (EU:
un, i*est Coeficiente de fricción, estática y dinámica Velocidad de rotación (angular)
r r ' )
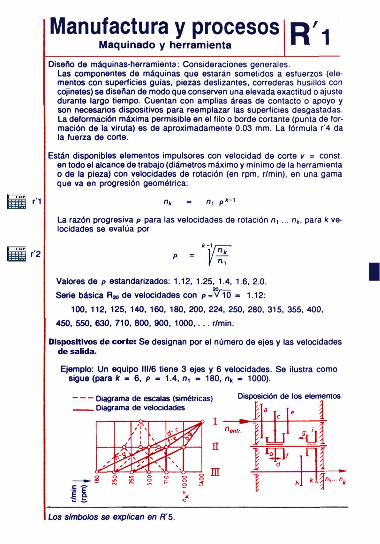
Manufactura y procesos Maquinado y herramienta Ri
Diseño de máquinas-herramienta: Consideraciones generales. Las componentes de máquinas que estarán sometidos a esfuerzos (elementos con superficies guías, piezas deslizantes, correderas husillos con cojinetes) se diseñan de modo que conserven una elevada exactitud o ajuste durante largo tiempo. Cuentan con amplias áreas de contacto o apoyo y son necesarios dispositivos para reemplazar las superficies desgastadas La deformación máxima permisible en el filo o borde cortante (punta de formación de la viruta) es de aproximadamente 0.03 mm. La formula r'4 da la fuerza de corte.
Están disponibles elementos impulsores con velocidad de corte v = const. en todo el alcance de trabajo (diámetros máximo y mínimo de la herramienta o de la pieza) con velocidades de rotación (en rpm, r/min), en una gama que va en progresión geométrica:
nk n, p*
La razón progresiva p para las velocidades de rotación n, locidades se evalúa por
. nk, para k ve-
p = /2F Valores de /> estandarizados: 1.12, 1.25, 1.4, 1.6, 2.0.
20,
Serie básica R» de velocidades con p =v 10 = 1.12:
100, 112, 125, 140, 160, 180, 200, 224, 250, 280, 315, 355, 400.
450, 550. 630. 710, 800, 900, 1 0 0 0 , . . . r/min. Dispositivos de corte: Se designan por el número de ejes y las velocidades
de salida.
Ejemplo: Un equipo MI/6 tiene 3 ejes y 6 velocidades. Se ilustra como sigue (para * - 6. p - 1.4, n, - 180, n„ - 1000).
- — Diagrama de escalas (simétricas) . Diagrama de velocidades
Disposición de los elementos
1
Los símbolos se explican en R'5.
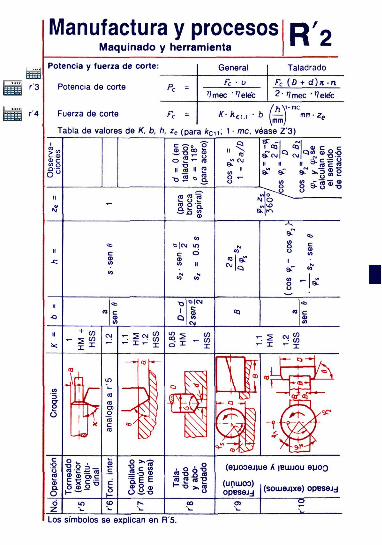
Manufactura y procesos Maquinado y herramienta R2
Potencia y fuerza de corte
Potencia de corte
Fuerza de corte
Tabla de valores de K, b, h, ze (para kcn'. 1 ■ me, véase Z'3)
Pe «
rc =
General
Fc- u '/mee 'íelec
* ■ - A C 1 . , ■ b
Taladrado
Fc (D * d)ií-n 2* *ímec ' 'íelec
/ / , \ i -mc — m m ^ e ynrty e
!¡H ■o2 o &
m rtffl 8 ¿8' <D
a
5 [M f¡ í= "! </> x *" I
o x i 2 I
(O I </)
I
fe n o r ai
lili S E E lili (euooej)ue X IEUIJOU euoo
(unwoo) , op'esejd <SOUJ<>Jlxe) opeseJd
Los símbolos se explican en R'5.
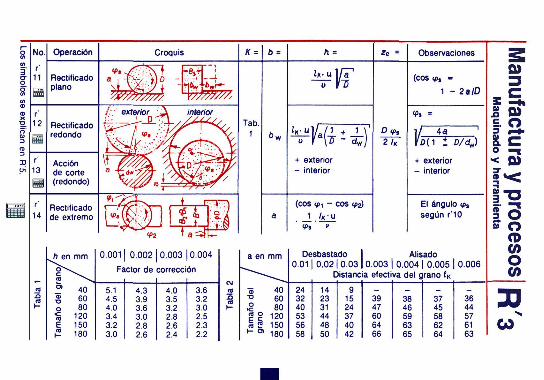
Observaciones
Al en mm
40 60 80
120 150 180
0.001
Fí
5.1 4.5 4.0 3.4 3.2 3.0
0.002 0.003 0.004
ctor de corrección
4.3 3.9 3.6 3.0 2.8 2.6
4.0 3.5 3.2 2.8 2.6 2.4
3.6 3.2 3.0 2.5 2.3 2.2
Desbastado Alisado 0.01 | 0.02 | 0.03 | 0.003 | 0.004 | 0.005 | 0.006
Distancia efectiva del grano fK
39 47 60 64 66
38 46 59 63 65
37 45 58 62 64
36 44 57 61 63
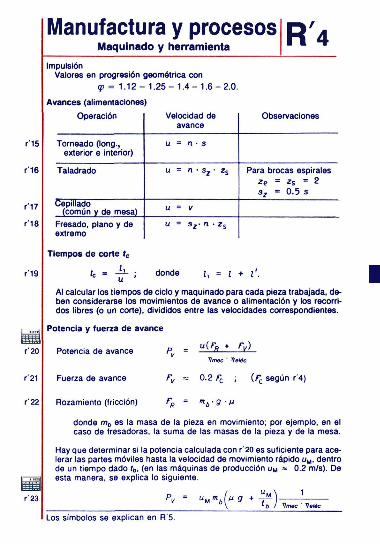
Manufactura y procesos Maquinado y herramienta
Impulsión Valores en progresión geométrica con
q> = 1 . 1 2 - 1 . 2 5 - 1 . 4 - 1 . 6 - 2 . 0 . Avances (alimentaciones)
Operación
Torneado (long., exterior e interior)
Taladrado
Cepillado (común y de mesa)
Fresado, plano y de extremo
Velocidad de avance
u = n ■ 3
u = n • sz- zs
u = v
u - sz- n • zs
Observaciones
Para brocas espirales
s2 = 0.5 s
Tiempos de corte fe
te m - i - ¡ donde ¡, = ¿ + i'.
Al calcular los tiempos de ciclo y maquinado para cada pieza trabajada, deben considerarse los movimientos de avance o alimentación y los recorridos libres (o un corte), divididos entre las velocidades correspondientes.
Potencia y fuerza de avance
Potencia de avance Pv = - R 1^-Vmec ' Vetee
Fuerza de avance Fv ~ 0.2 Fc ; (/"c según r'4)
Rozamiento (fricción) fR - " i 6 • g • ti
donde m„ es la masa de la pieza en movimiento; por ejemplo, en el caso de fresadoras, la suma de las masas de la pieza y de la mesa.
Hay que determinar si ia potencia calculada con r 20 es suficiente para acelerar las partes móviles hasta la velocidad de movimiento rápido uM, dentro de un tiempo dado t¡,, (en las máquinas de producción uu
m 0.2 m/s). De esta manera, se explica lo siguiente.
pv • "■*«»(" s + - r 1 ) - — * - — °\ ' W ITOC le/éc
Los símbolos se explican en R'5.
R'4
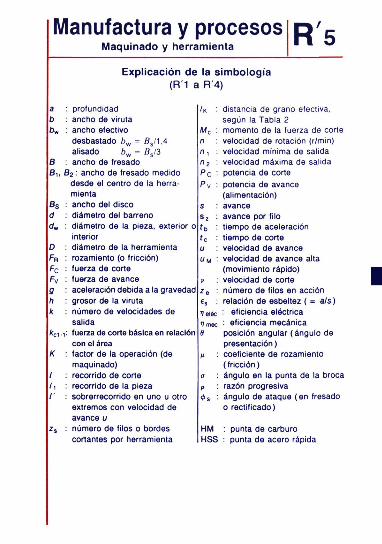
Manufactura y procesos
a b b w
8
s„
BS
d
Cw
0
F R
Fe Fv 0 h k
*cl -
/< / / i
/'
¿S
Maquinado y herramienta R5 Explicación de la simbología
(R'1 a
: profundidad : ancho de viruta : ancho efectivo
desbastado bw = B s /1 ,4 alisado í>w = B s / 3
: ancho de fresado fl?: ancho de fresado medido
desde el centro de la herramienta
: ancho del disco : diámetro del barreno : diámetro de la pieza, exterior o
interior : diámetro de la herramienta : rozamiento (o fricción) : fuerza de corte : fuerza de avance : aceleración debida a la gravedad : grosor de la viruta : número de velocidades de
salida v fuerza de corte básica en relación
con el área : factor de la operación (de
maquinado) : recorrido de corte : recorrido de la pieza : sobrerrecorrido en uno u otro
extremos con velocidad de avance u
: número de filos o bordes cortantes por herramienta
R'4)
Ir.
Mc
n
" i n 2
P e Pv
s s ,
'» <c u
" M
V
Ze fs teMc 1 mee e
V-
a
p * s
H M HSS
distancia de grano efectiva, según la Tabla 2 momento de la fuerza de corte velocidad de rotación (r/min) velocidad mínima de salida velocidad máx ima de salida potencia de corte
potencia de avance (alimentación) avance avance por filo t iempo de aceleración t iempo de corte velocidad de avance velocidad de avance alta (movimiento rápido) velocidad de corte número de filos en acción relación de esbeltez ( = ais) : eficiencia eléctrica : eficiencia mecánica posición angular (ángu lo de presentación) coeficiente de rozamiento ( f r icción) ángulo en la punta de la broca razón progresiva ángulo de ataque ( e n fresado o rectif icado)
: punta de carburo : punta de acere rápida
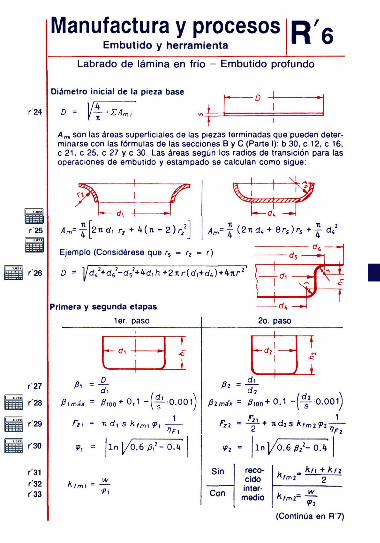
Manufactura y procesos Embutido y herramienta R'6
Labrado de lámina en frío - Embutido profundo
Diámetro inicial de la pieza base
- n ■ZA„
r Am, son las áreas superficiales de las piezas terminadas que pueden determinarse con las fórmulas de las secciones B y C (Parte I): b 30, c 12, c 16, c 21, c 25, c 27 y c 30. Las áreas según los radios de transición para las operaciones de embutido y estampado se calculan como sigue:
Am- ' 4 L [ 2 n d , r, + ft(n-2)r7;
Ejemplo (Considérese que rs = rz = r)
D = l /d4 2 +d 62 -d 5
2 +4d,h+2 j i r (d ,+d<) + i " i r - 2 '
¿ m = | ( 2 7 i d 4 + 8 r s ) r s + J d<!
¿6— H
^
Primera y segunda etapas
1er paso
y ^ ^ 2o. paso
l _ J — , ♦ 1
-4-
~d¡'.
fí - D
P,má, = /9 , 0 0 +0,1 - ( | i - 0 . 0 0 l ]
1
02
Í ¡ W > = 0 ioo + O.1 - ( - j - 0 . 001
A>, " u d , s A í m l <px tF\
r,2 fu + n d 2 s kfmtfi—— 2 7 f ,
9>, = l n l / o . 6 / 3 , 2 - 0.4 f»2 = l n ] / 0 . 6 f t 2 - 0.4
Sin
Con
recocido intermedio
_ A/, + ku
<r - W
K,m2' 92 (Continúa en R'7)
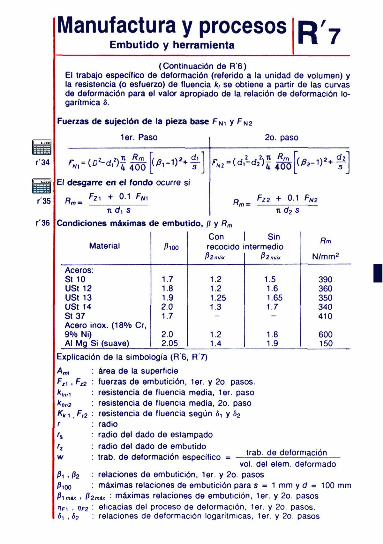
Manufactura y procesos Embutido y herramienta R'7
(Continuación de R'6) El trabajo especifico de deformación (referido a la unidad de volumen) y la resistencia (o esfuerzo) de fluencia k¡ se obtiene a partir de las curvas de deformación para el valor apropiado de la relación de deformación logarítmica 5.
Fuerzas de sujeción de la pieza base FN 1 y F N 2
1er. Paso 2o. paso
El desgarre en el fondo ocurre si
„ F z , + 0.1 FN,
n di s
Condiciones máximas de embutido, fi y Rm
'«-<*^í¿fe[(A-')'*!1] FZ2 + 0-1 FN
n 02 s
Material
Aceros: St 10 USt 12 USt 13 USt 14 St37 Acero inox. (18% Cr, 9% Ni) Al Mg Si (suave)
0100
1.7 1.8 1.9 2.0 1.7
2.0 2.05
Con recocido
P2míx
1.2 1.2 1.25 1.3
-1.2 1.4
Sin ntermedio
hn,é,
1.5 1.6 1.65 1.7
-1.8 1.9
flm
N/mm2
390 360 350 340 410
600 150
Explicación de la simbologia (R'6, R'7)
A mi F * i . i *fm\
kfm2 * * i .
01 .02
1F1 . 17F2 6, , í¡2
área de la superficie fuerzas de embutición, 1er. y 2o pasos. resistencia de fluencia media, 1er. paso resistencia de fluencia media, 2o paso resistencia de fluencia según ó, y b2
radio radio del dado de estampado radio del dado de embutido trab. de deformación especifico =
vol. del elem. deformado relaciones de embutición, 1er. y 2o. pasos máximas relaciones de embutición para s = 1 mm y d = 100 mm
váx : máximas relaciones de embutición, 1er. y 2o. pasos eficacias del proceso de deformación, 1er. y 2o. pasos. relaciones de deformación logarítmicas, 1er. y 2o. pasos
trab. de deformación
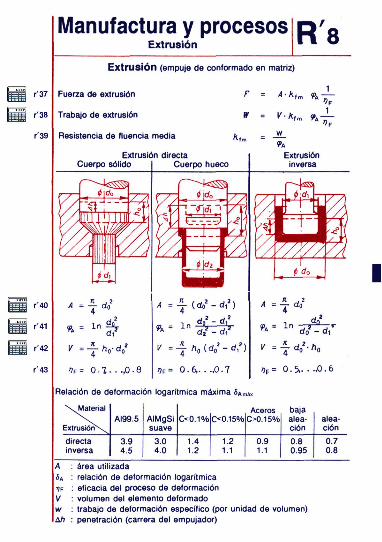
Manufactura y procesos Extrusión R'8
E x t r u s i ó n (empuje de conformado en matriz)
Fuerza de extrusión
Trabajo de extrusión
Resistencia de fluencia media 1,™
Ak
Vk,
w
1
Extrusión directa Extrusión Cuerpo sólido Cuerpo hueco inversa
Y& / / V,
—4® JA " I _ + _
^m " 11 '////
M» .
>7F = 0.7. • • .,0 • 8
d 2 ' - d i
i»F» 0 .6 , . . . .0-7
(PA= I n do - di
i)F = 0.5, . . - . 0 .6
Relación de deformación logarítmica máxima 6Air
Material AI99.5 AIMgSi
suave C«¡0.1% C<0.15%
Aceros baja C»0.15% alea
ción aleación
directa inversa
3.0 4.0
1.4 1.2
1.2 1.1
0.9 1.1
0.8 0.95
0.7 0.8
A : área utilizada ÓA : relación de deformación logarítmica T*F : eficacia del proceso de deformación V : volumen del elemento deformado w : trabajo de deformación específico (por unidad de volumen) An : penetración (carrera del empujador)
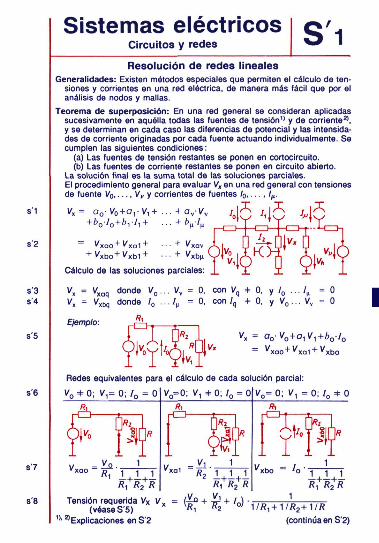
Sistemas eléctricos Circuitos y redes S'i Resolución de redes lineales
Generalidades: Existen métodos especiales que permiten el cálculo de tensiones y corrientes en una red eléctrica, de manera más fácil que por el análisis de nodos y mallas.
Teorema de superposición: En una red general se consideran aplicadas sucesivamente en aquélla todas las fuentes de tensión1' y de corriente21, y se determinan en cada caso las diferencias de potencial y las intensidades de corriente originadas por cada fuente actuando individualmente. Se cumplen las siguientes condiciones:
(a) Las fuentes de tensión restantes se ponen en cortocircuito. (b) Las fuentes de corriente restantes se ponen en circuito abierto.
La solución final es la suma total de las soluciones parciales. El procedimiento general para evaluar V, en una red general con tensiones de fuente V0 V„ y corrientes de fuentes / 0 , . . . , /,,.
v,= o0Vo+o,-v,+ ...+av-vv / | j 5 ;,Jc5 / j 5 +/.0-/0 + fc,/,+
= vxa0+v. + Vxbo+Vxb1+ ■ • ■ + v * b | l
l
Cálculo de las soluciones parciales:
donde V„ . . . V, = 0, con Vq * 0, y /„ *xaq Vyhn donde /„ "xbq
Ejemplo:
° o v o + ° i v i + V ' o
Redes equivalentes para el cálculo de cada solución parcial:
y 0 * 0 ; V,= 0; 70 = o|v0^Q; V, * 0; /0 - o|v0= 0; V, = 0; / „ * 0
«1 1 + 1 + 1
Tensión requerida Vx v „ = (^ + -íp + /.) ■ - ¡ - = — — 1 — T T T T (véaVeS'5) " V«i F 2 ° ' 1/R, + 1/R2+1/R
11 ^Explicaciones en S'2 (continúa en S'2)
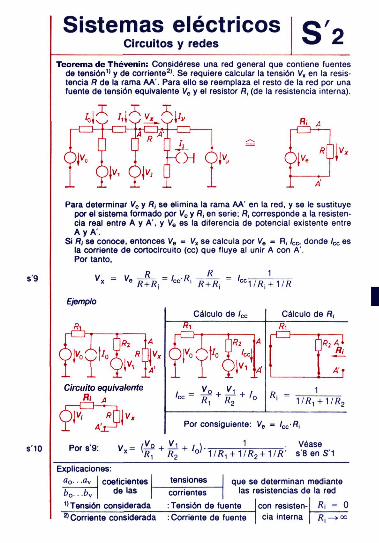
Sistemas eléctricos Circuitos y redes S'2
Teorema de Thévenin: Considérese una red general que contiene fuentes de tensión" y de corriente21. Se requiere calcular la tensión V„ en la resistencia R de la rama AA'. Para ello se reemplaza el resto de la red por una fuente de tensión equivalente Ve y el resistor R, (de la resistencia interna).
4i5 '.iS^Sj'x
Para determinar Ve y R, se elimina la rama AA' en la red, y se le sustituye por el sistema formado por Ve y R, en serie; fl, corresponde a la resistencia real entre A y A', y Ve es la diferencia de potencial existente entre A y A'.
Si R, se conoce, entonces Ve = V„ se calcula por Ve = R, /cc, donde /cc es la corriente de cortocircuito (cc) que fluye al unir A con A'. Por tanto,
V, = Vc _R_ R+R¡ lr.r.R,
R R + R:
la 1 MR. + MR
Cálculo de f?,
Pors'9- 1/ » (Va + & + / ] ] ■ v
corsa. v x - ^ +R2
+ 'o) i/fi1 + i /R2 + i / R ' S'. Véase 8 en S'1
Explicaciones: "o- ■ "v I coeficientes b0.. .fov de las corrientes
que se determinan mediante las resistencias de la red
"Tensión considerada :Tensión de fuente 21 Corriente considerada : Corriente de fuente
con resistencia interna
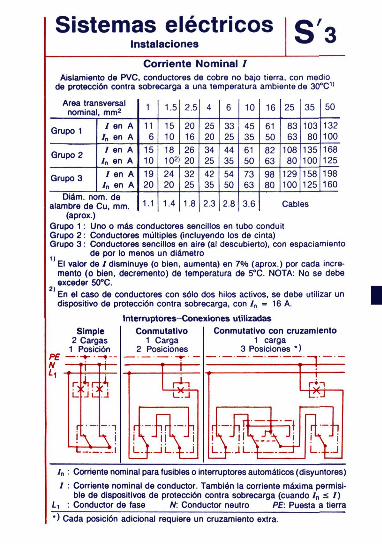
Sistemas eléctricos Instalaciones S'3
Corriente Nominal / Aislamiento de PVC, conductores de cobre no bajo tierra, con medio
de protección contra sobrecarga a una temperatura ambiente de 30°C"
Área transversal nominal, mm2
Grupo 1
Grupo 2
Grupo 3
Diám. nc alambre de
/ en A /„ en A I en A
/„ en A / en A
/„ en A m. de Cu, mm.
1
11 6
15 10 19 20
1.1
1.5
15 10
2.5
20 16
18 26 1021 20 24 20
1.4
32 25
1.8
4
25 20 34 25 42 35
2.3
6
33 25 44 35 54 50
2.8
10
45 35 61 50 73 63
3.6
16
61 50 82 63 98 80
25
83 63
108 80
129 100
35
103 80
135 100 158 125
Cables
50
132 100 168 125 198 160
(aprox.) Grupo 1 : Uno o más conductores sencillos en tubo conduit Grupo 2 : Conductores múltiples (incluyendo los de cinta) Grupo 3: Conductores sencillos en aire (al descubierto), con espaciamiento
de por lo menos un diámetro El valor de / disminuye (o bien, aumenta) en 7% (aprox.) por cada incremento (o bien, decremento) de temperatura de 5°C. NOTA: No se debe exceder 50°C.
2) En el caso de conductores con sólo dos hilos activos, se debe utilizar un dispositivo de protección contra sobrecarga, con /„ - 16 A.
Interruptores-Conexiones utilizadas
PE N 1-1
Simple 2 Cargas
1 Posición
)t\'y> r\ri
SA.
Conmutativo con cruzamiento 1 carga
3 Posiciones *)
/„ : Corriente nominal para fusibles o interruptores automáticos (disyuntores)
/ : Corriente nominal de conductor. También la corriente máxima permisible de dispositivos de protección contra sobrecarga (cuando /„ s / )
L i : Conductor de fase N: Conductor neutro PE: Puesta a tierra
*) Cada posición adicional requiere un cruzamiento extra.
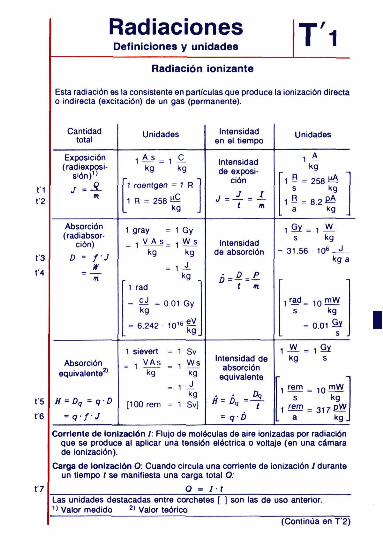
Radiaciones Definiciones y unidades T'i
Radiación ionizante
Esta radiación es la consistente en partículas que produce la ionización directa o indirecta (excitación) de un gas (permanente).
Cantidad total
Exposición (radiexposi -
s ión) "
J - - S -m
Absorción (radiabsor-
ción)
0 = f J W m
Absorción equivalente21
H = Dq=qD
= q-fJ
Unidades
, A s = , C kg kg
1 roentgen = 1 R
1 R = 258 1*°-L kg J
1 gray = 1 Gy
kg kg
- 1 -A kg
i rad
= £J = 0.01 Gy kg
= 6.242 ■ 1 0 , 6 | ^
1 sievert = 1 Sv . , VAS _ , Ws
kg kg
= 1 ± kg
[100 rem - 1 Sv[
Intensidad en el tiempo
Intensidad de exposi
ción
t m
Intensidad de absorción
6-^=1 t n
Intensidad de
equivalente
Da H=¡>9 = " 7 "
- o O
Unidades
, A kg
1 ñ = 258 ^ s kg
1 3 - 8 2 E A a kg
1 ^ = 1 - « s kg
= 31.56 1 0 6 ^ L _ kg a
1 rad = 1 0 mW s kg
= 0.01 Sy s .
1 - W . - 1 G * kg s
r- - ,
1 rem _ i n mW s kg
, rem = 317pW L a kg j
Corriente de Ionización /: Flujo de moléculas de aire ionizadas por radiación que se produce al aplicar una tensión eléctrica o voltaje (en una cámara de ionización).
Carga de ionización O: Cuando circula una corriente de ionización / durante un tiempo í se manifiesta una carga total O.
Las unidades destacadas entre corchetes [ ] son las de uso anterior. ' ' Valor medido 2 | Valor teórico
(Continúa en T'2)
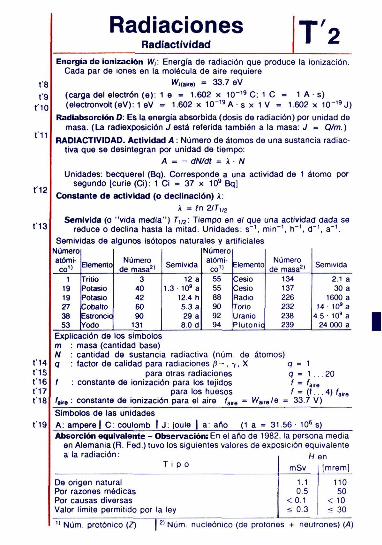
Radiaciones Radiactividad T'2
Energia de ionización W,: Energía de radiación que produce la ionización. Cada par de iones en la molécula de aire requiere
M W . ) = 33.7 eV (carga del electrón (e): 1 e - 1.602 x 10~19 C; 1 C = 1 A ■ s) (electronvoit(eV):1 eV = 1.602 x K T ' 9 A - s x 1 V « 1.602 x 10~19J)
Radiabsorción D: Es la energia absorbida (dosis de radiación) por unidad de masa. (La radiexposición J está referida también a la masa: J = Q/m.)
RADIACTIVIDAD. Actividad A : Número de átomos de una sustancia radiactiva que se desintegran por unidad de tiempo:
A = - dN/dt - A ■ N Unidades: becquerel (Bq). Corresponde a una actividad de 1 átomo por
segundo [curie (Ci): 1 Ci - 37 x 109 Bq] Constante de actividad (o declinación) A:
A = fn 2/7", „, Semlvida (o "vida media") r1/2: Tiempo en el que una actividad dada se
reduce o declina hasta la mitad. Unidades: s " \ min" ' , h~\ d ~ \ a ' . Semividas de algunos isótopos naturales y artificiales
Número atómico11
1 19 19 27 38 53
Elemento
Tritio Potasio Potasio Cobalto Estroncio Yodo
Número de masa21
3 40 42 60 90
131
Semivida
12 a 13 108 a
12.4 h 5.3 a 29 a
8.0 d
Número atómico1' 55 55 88 90 92 94
Elemento
Cesio Cesio Radio Torio Uranio Plutonio
Explicación de los símbolos m : masa (cantidad base) N : cantidad de sustancia radiactiva (núm. de álc q : factor de calidad para radiaciones (J- , •>, X
para otras radiaciones 1 : constante de ionización para los tejidos
para los huesos ftn : constante de ionización para el aire la,n = Wai
Símbolos de las unidades A: ampere | C: coulomb 1 J : joule | a: año (1 a =
Número de masa2
134 137 226 232 238 239
mos) Q «
Semivida
2.1 a 30 a
1600 a 14 109 a
4.5 • 10a a 24 000 a
1 q - 1 . . . 20 ' = 'aire 1 - ( f . . . 4 ) f , „ .
e / e - 33.7 V)
31.56 ■ 1 06s) Absorción equivalente - Observación: t: n el año de 198?, I a persona media
en Alemania (R. Fed.) tuvo los siguientes valores de exposición equivalente a la radiación: y e n
r ' p ° m í» [mrem]
De origen natural Por razones médicas Por causas diversas Valor límite permitido por la ley
110 50
< 10 < 30
' Núm. protónico (Z) j 2I Núm. nucleónico (de protones + neutrones) (A)
Ingeniería de control Terminología de la ingeniería de control
CONTROL El control es un proceso mediante el cual se registra una cantidad llamada variable controlada (la cantidad que se debe controlar). Entonces, esta variable controlada se compara con otra cantidad, la variable de referencia. A continuación la variable controlada es afectada de tal manera que sea igual a la variable de referencia. La característica principal del control es el circuito de acción cerrado, en el que la variable controlada influye continuamente sobre sí misma (ver más adelante el diagrama de flujo de control).
Nota preliminar: Los nombres y definiciones de los términos siguientes se apegan a los de la norma DIN 1926, versión 2/1994.
Funciones, cantidades y símbolos que describen el comportamiento de los elementos y sistemas de transferencia
Variable de entrada u La variable de entrada ues una cantidad que actúa sobre el sistema considerado sin ser influida por él.
Variable de salida v Es una cantidad de un sistema que sólo puede ser influida por ella misma o por sus variables de entrada.
Tiempo de retraso T, constante de tiempo ; El elemento P-T,, que es el elemento de retraso de primer orden, es una unidad funcional que presenta el comportamiento de transferencia:
u'1 v(t) + Tv{t) - Kpu(t)
donde 7"es el tiempo de retraso, que también se llama constante de tiempo. (Ver la solución de esta ecuación diferencial en D'4, D' 9.)
Frecuencia angular característica m0. razón de amortiguamiento 0 El elemento P-T2, que es el elemento de retraso de segundo orden, es una unidad funcional que presenta el comportamiento de transferencia:
u'2 v(t) + (2*>/<Uo) v(t) + (1/<u0)2 v(t) - KpU(t)
En este caso too es la frecuencia angular característica y ¡) es la relación de amortiguamiento. (Ver la solución de esta ecuación diferencial en D' 5, mi).
Frecuencia angular propia io¿ La frecuencia angular propia, o eigenfrecuencia angular ü)a se define con la siguiente fórmula, en la que intervienen la frecuencia angular característica (o o y la relación de amortiguamiento 6.
u'3 <ud - cu0 • V 1 " ®2
U'i
Ver explicación de los símbolos en U'35
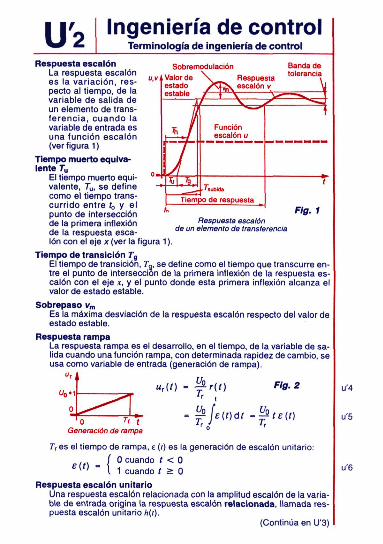
U'2 Ingeniería de control Terminología de ingeniería de control
Sobremodulación u,v Valor de
estado estable
Respuesta escalón La respuesta escalón es la variación, respecto al tiempo, de la variable de salida de un elemento de transferencia, cuando la variable de entrada es una función escalón (ver figura 1)
Tiempo muerto equivalente Tu
El tiempo muerto equivalente, Tu, se define como el tiempo transcurrido entre H, y el punto de intersección de la primera inflexión de la respuesta escalón con el eje x (ver la figura 1).
Tiempo de transición 7g El tiempo de transición, T„, se define como el tiempo que transcurre entre el punto de intersección de la primera inflexión de la respuesta escalón con el eje x, y el punto donde esta primera inflexión alcanza el valor de estado estable.
Sobrepaso vm Es la máxima desviación de la respuesta escalón respecto del valor de estado estable.
Respuesta rampa La respuesta rampa es el desarrollo, en el tiempo, de la variable de salida cuando una función rampa, con determinada rapidez de cambio, se usa como variable de entrada (generación de rampa).
Respuesta escalón de un elemento de transferencia
" r ( 0 Flg.2
0 T' t Generación de rampa
e ( i )d f ua te(t)
T, es el tiempo de rampa, e (r) es la generación de escalón unitario: I 0 cuando / < 0
" 1 1 e«) cuando /
Respuesta escalón unitario Una respuesta escalón relacionada con la amplitud escalón de la variable de entrada origina la respuesta escalón relacionada, llamada respuesta escalón unitario h(t).
(Continúa en U'3)
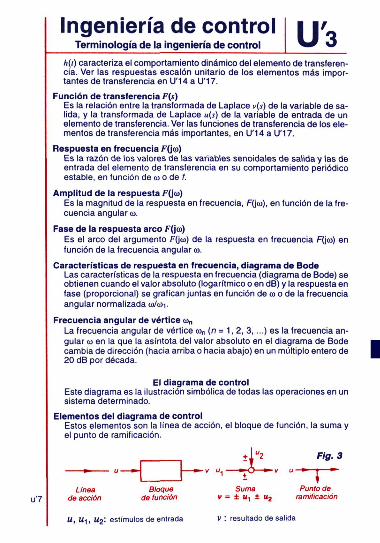
Ingeniería de control Terminología de la ingeniería de control U'3
h(t) caracteriza el comportamiento dinámico del elemento de transferencia. Ver las respuestas escalón unitario de los elementos más importantes de transferencia en U"I4 a U'17.
Función de transferencia F(s) Es la relación entre la transformada de Laplace v(s) de la variable de salida, y la transformada de Laplace u(s) de la variable de entrada de un elemento de transferencia. Ver las funciones de transferencia de los elementos de transferencia más importantes, en U'14 a U'17.
Respuesta en frecuencia F(jcp) Es la razón de los valores de las variables senoidales de salida y las de entrada del elemento de transferencia en su comportamiento periódico estable, en función de o o do f.
Amplitud de la respuesta F(j<o) Es la magnitud de la respuesta en frecuencia, Fíjto), en función de la frecuencia angular 10.
Fase de la respuesta arco /• (jco) Es el arco del argumento F(j<o) de la respuesta en frecuencia F(jo>) en función de la frecuencia angular co.
Características de respuesta en frecuencia, diagrama de Bode Las características de la respuesta en frecuencia (diagrama de Bode) se obtienen cuando el valor absoluto (logarítmico o en dB) y la respuesta en fase (proporcional) se graf¡can juntas en función de m o de la frecuencia angular normalizada cotoi.
Frecuencia angular de vértice mn La frecuencia angular de vértice <on (n = 1, 2, 3,...) es la frecuencia angular (o en la que la asíntota del valor absoluto en el diagrama de Bode cambia de dirección (hacia arriba o hacia abajo) en un múltiplo entero de 20 dB por década.
El diagrama de control Este diagrama es la ilustración simbólica de todas las operaciones en un sistema determinado.
Elementos del diagrama de control Estos elementos son la línea de acción, el bloque de función, la suma y el punto de ramificación.
Fig.3
T Línea Bloque Suma Punto de de acción de función v - ± u1 ± u2 ramificación
U, t¿i, í¿2: estímulos de entrada v : resultado de salida
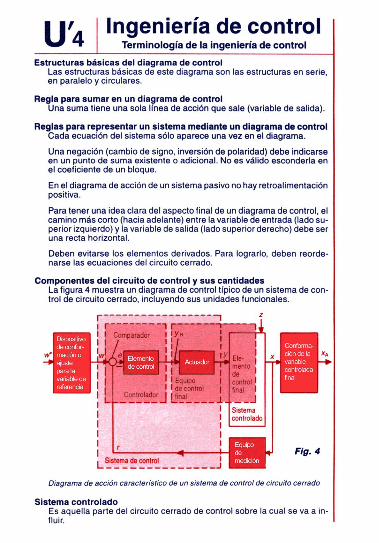
U'4 Ingeniería de control Terminología de la ingeniería de control
Estructuras básicas del diagrama de control Las estructuras básicas de este diagrama son las estructuras en serie, en paralelo y circulares.
Regla para sumar en un diagrama de control Una suma tiene una sola línea de acción que sale (variable de salida).
Reglas para representar un sistema mediante un diagrama de control Cada ecuación del sistema sólo aparece una vez en el diagrama. Una negación (cambio de signo, inversión de polaridad) debe indicarse en un punto de suma existente o adicional. No es válido esconderla en el coeficiente de un bloque.
En el diagrama de acción de un sistema pasivo no hay retroalimentación positiva.
Para tener una idea clara del aspecto final de un diagrama de control, el camino más corto (hacia adelante) entre la variable de entrada (lado superior izquierdo) y la variable de salida (lado superior derecho) debe ser una recta horizontal.
Deben evitarse los elementos derivados. Para lograrlo, deben reorde-narse las ecuaciones del circuito cerrado.
Componentes del circuito de control y sus cantidades La figura 4 muestra un diagrama de control típico de un sistema de control de circuito cerrado, incluyendo sus unidades funcionales.
I Equipo I I de control
Controlador I | | ¡ n a |
■ Sistema de control
Diagrama de acción característico de un sistema de control de circuito cerrado
Sistema controlado Es aquella parte del circuito cerrado de control sobre la cual se va a influir.
Ingeniería de control Terminología de ingeniería de control
Punto de medición de la variable controlada; variable controlada x El punto de medición de la variable controlada es el lugar, en el sistema controlado, donde se obtiene el valor de esa variable (figura 4). La variable controlada x es la variable del sistema controlado que se registra para su control, y que se integra al sistema de control a través del equipo de medición, x es la variable de salida del sistema controlado y la variable de entrada del equipo de medición.
Formación de la variable controlada final; variable controlada final xA La variable controlada final, xrA, es una cantidad sobre la que el circuito cerrado de control debe influir. Cuando es fácil de obtener por medición, AA es idéntica a la variable controlada x y se retroalimenta al elemento de comparación a través del equipo de medición. Sólo cuando no es posible obtener .VA, o sólo es posible con grandes dificultades, ésta existirá como cantidad independiente además de la variable controlada x.
En la figura 4 (el diagrama de flujo característico de un sistema de control de circuito cerrado), la formación de la variable controlada final JVA se hace con la variable controlada x, por lo general agregándola al sistema controlado. En este caso, la variable controlada final aparece fuera del circuito de control, y no es posible controlar las variables perturbantes que influyen durante la formación.
Ejemplo: Variable final controlada: Temperatura del contenido de un recipiente.
Variable controlada: Temperatura de la parrilla.
La variable controlada final, JTA. también puede encontrarse dentro del sistema controlado, esto es, dentro del circuito cerrado de control. En este caso, la variable controlada se forma a través de la variable controlada final; las variables perturbadoras que influyen se pueden controlar.
Ejemplo: Variable controlada final: Relación de mezcla de dos líquidos. Variable controlada: Resistencia específica.
Equipo de medición, variable r retroallmentada El equipo de medición es la suma total de los elementos funcionales para registrar, transferir, adaptar y distribuir las variables (ver figura 4). La variable retroalimentada res la que resulta de la medición de la variable controlada x.
Ajustador de variable de referencia, variable de referencia w El ajustador de variable de referencia es una unidad funcional que produce una variable de referencia w que se deriva de una variable objetivo w', definida por el usuario (ver figura 4).
La variable de referencia w no está influida por el circuito cerrado de control con el que se relaciona; la variable de salida del circuito cerrado de control debe seguir a la variable de referencia con la dependencia especificada.
Nota: Con mucha frecuencia, el objetivo y la variable de referencia son idénticos.
U'5
U'6 Ingeniería de control Terminología de la ingeniería de control
Dispositivo de conformación de la variable de referencia; variable objetivo »•*
El dispositivo de conformación de la variable de referencia produce, a partir de una variable objetivo w" -aplicada a la entrada- una variable de referencia w de salida. Este proceso de conformación asegura que la variable de referencia w, o sus derivadas respecto al tiempo, no rebasarán los valores críticos (ver figura 4). La variable objetivo w' se define externamente y no está influida por el sistema de circuito cerrado que se tiene en consideración; la variable controlada final w del sistema de circuito cerrado debe seguir, con la dependencia especificada, a la variable objetivo.
Comparador, variable de error e El comparador produce la variable de error e en función de la variable de referencia w y la variable retroalimentada r (ver figura 4).
e = w - r.
Elemento de control, controlador, variable de salida VR del controlador El elemento de control, o elemento controlador, produce la variable de salida yfí del controlador utilizando la variable de error edel comparador. El proceso asegura que la variable controlada x del circuito de control siga a la variable de referencia w tan rápida y precisamente como sea posible, aun cuando haya variables perturbadoras presentes. El controlador está formado por el comparador y ei elemento de control (ver figura 4).
Actuador Es una unidad funcional que usa la variable de salida del controlador, ya, para formar y. La variable y es necesaria para modular el elemento de control final (ver figura 4).
Elemento de control final, variable reguladora y El elemento de control final está en la entrada del sistema controlado e influye sobre el flujo de energía. Su variable de entrada es la variable reguladora y (ver figura 4). Esta señal transmite el resultado de control del sistema al sistema controlado.
Equipo de control final El equipo de control final está formado por el actuador y el elemento de control final.
Sistema de control Es aquella parte del diagrama de control que debe influir sobre el sistema controlado, a través del elemento de control final.
Punto de regulación Es el punto de aplicación de la variable reguladora y.
Punto de perturbación, variable de perturbación z Es el punto donde la variable de perturbación;, aplicada externamente, ejerce la influencia que se pretende en el control de circuito cerrado (ver figura 4).
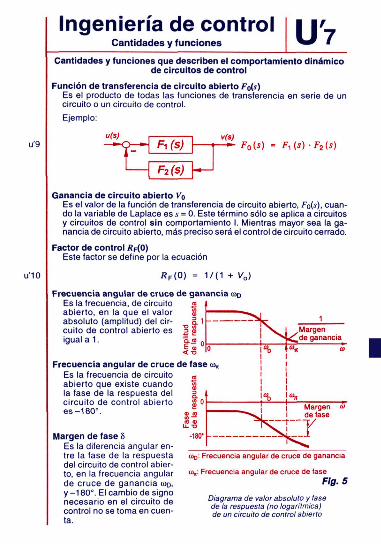
Ingeniería de control Cant idades y func iones uv
Cantidades y funciones que describen el comportamiento dinámico de circuitos de control
Función de transferencia de circuito abierto F¡¡(s) Es el producto de todas las lunciones de transferencia en serie de un circuito o un circuito de control.
Ejemplo:
u(s) K(s) F2
ífü—r v(s)
— - Fc (s) - F , ( i ) - F 2 ( j )
Ganancia de circuito abierto V0 Es el valor de la función de transferencia de circuito abierto, F 0 ( J ) , cuando la variable de Laplace es s - 0. Este término sólo se aplica a circuitos y circuitos de control sin comportamiento I. Mientras mayor sea la ganancia de circuito abierto, más preciso será el control de circuito cerrado.
Factor de control /<F(0) Este factor se define por la ecuación
RF(0) - 1/(1 + V0)
Frecuencia angular de cruce de ganancia <DD Es la frecuencia, de circuito abierto, en la que el valor absoluto (amplitud) del circuito de control abierto es igual a 1.
Frecuencia angular de cruce de fase ID, Es la frecuencia de circuito m abierto que existe cuando « la fase de la respuesta del circuito de control abierto e s - 1 8 0 ° . „
Margen de fase 8 Es la diferencia angular entre la fase de la respuesta del circuito de control abierto, en la frecuencia angular de cruce de ganancia Ü>D, y -180° . El cambio de signo necesario en el circuito de control no se toma en cuenta.
(ÜQ: Frecuencia angular de cruce de ganancia
(Ü : Frecuencia angular de cruce de fase Flg.S
Diagrama de valor absoluto y fase de la respuesta (no logarítmica) de un circuito de control abierto
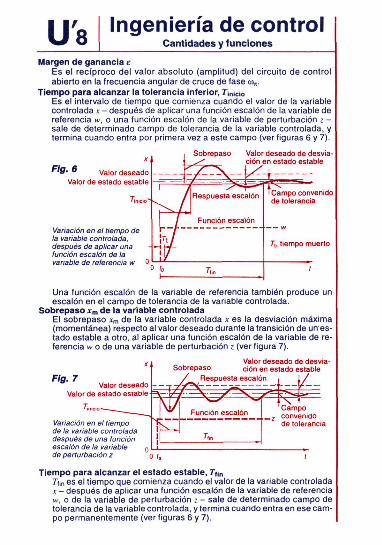
U'8 Ingeniería de control Cantidades y funciones
Margen de ganancia e Es el recíproco del valor absoluto (amplitud) del circuito de control abierto en la frecuencia angular de cruce de fase m,.
Tiempo para alcanzar la tolerancia inferior, 7"|„¡C|0 Es el intervalo de tiempo que comienza cuando el valor de la variable controlada x - después de aplicar una función escalón de la variable de referencia w, o una función escalón de la variable de perturbación z -sale de determinado campo de tolerancia de la variable controlada, y termina cuando entra por primera vez a este campo (ver figuras 6 y 7).
Sobrepaso
Fig.6 Valor deseado Valor de estado estable
Variación en el tiempo de la variable controlada, después de aplicar una función escalón de la variable de referencia w
Valor deseado de desviación en estado estable
Campo convenido de tolerancia
7",, tiempo muerto
Una función escalón de la variable de referencia también produce un escalón en el campo de tolerancia de la variable controlada.
Sobrepaso xm de la variable controlada El sobrepaso .vm de la variable controlada x es la desviación máxima (momentánea) respecto al valor deseado durante la transición de un estado estable a otro, al aplicar una función escalón de la variabie de referencia w o de una variable de perturbación z (ver figura 7).
Valor deseado de desvía-Sobrepaso ción en estado estable
Flg. 7 / Respuesta escalón Valor deseado
Valor de estado estable
Variación en el tiempo de la variable controlada después de una función escalón de la variable de perturbación z
Tiempo para alcanzar el estado estable, 7'ím 7"fin es el tiempo que comienza cuando el valor de la variable controlada .x - después de aplicar una función escalón de la variable de referencia w, o de la variable de perturbación z - sale de determinado campo de tolerancia de la variable controlada, y termina cuando entra en ese campo permanentemente (ver figuras 6 y 7).

Ingeniería de control Reglas U'9
REGLAS PARA DETERMINAR LA FUNCIÓN DE TRANSFERENCIA DEL CIRCUITO DE CONTROL TOTAL
La función de transferencia completa se forma usando cada elemento de transferencia individual.
Combinación en serie
u(s;
Combinac
u(s)
Fi(s)
ion en par
— p -
Regla de retroa
u(s)
alelo
F1(S)
F2(S)
limentacic
K(s)
F2(S)
F2(S)
—^
^ , í >n
v(s)
vfs) F(s) = F,{s)-F2(s)
F(s)-F,(s) + F2(s)
F(s)- Fjjs) ^+F,(s)■F2(s)
Nota: El signo del denominador de F(J) es el contrario del signo en el punto de suma del diagrama de control. Un signo "+" en el punto de suma indica retroalimentación positiva Un signo "-" en el punto de suma indica retroalimentación negativa
Si F I ( Í ) y/o F2(s) contienen cambios de signo, entonces habrá retroalimentación negativa (positiva) cuando la cantidad de cambios de signo en todo el circuito sea impar (par).
Caso especial: F2(.<) = 1 (retroalimentación directa).
u(s) T - K(s) vis)
F{s) 1+F,(í)
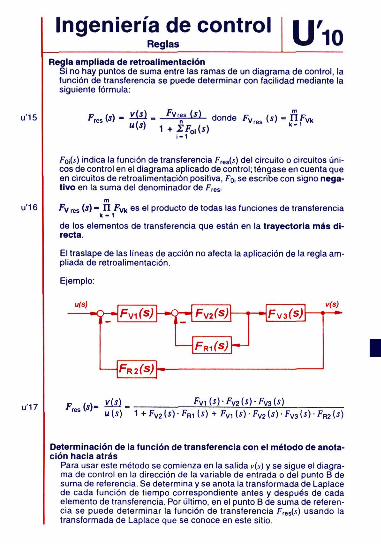
Ingeniería de control Reglas U'10
Regla ampliada de retroalimentación Si no hay puntos de suma entre las ramas de un diagrama de control, la función de transferencia se puede determinar con facilidad mediante la siguiente fórmula:
r»d) _ V±s} fvres (S) U(S) ' 1 +ZFoí(s)
1-1
donde F V r e s ( i ) - n F v l
FOÍ(Í) indica la función de transferencia Fres(j) del circuito o circuitos únicos de control en el diagrama aplicado de control; téngase en cuenta que en circuitos de retroalimentación positiva, F0¡ se escribe con signo negativo en la suma del denominador de Fres.
m
' v res ( f ) " n Fvk es el producto de todas las funciones de transferencia
de los elementos de transferencia que están en la trayectoria más directa.
El traslape de las líneas de acción no afecta la aplicación de la regla ampliada de retroalimentación.
Ejemplo:
F (S)~ - í ^ FV1 (5) ■ FV2 (j) ■ FV3 (£) resV' u[s) 1 + F v 2 ( í ) - F R l ( i ) + F v , ( s ) - F v 2 ( í ) - , FvsW-FmW
Determinación de la función de transferencia con el método de anotación hacia atrás
Para usar este método se comienza en la salida v(s) y se sigue el diagrama de control en la dirección de la variable de entrada o del punto B de suma de referencia. Se determina y se anota la transformada de Laplace de cada función de tiempo correspondiente antes y después de cada elemento de transferencia. Por último, en el punto B de suma de referencia se puede determinar la función de transferencia Fres(.i) usando la transformada de Laplace que se conoce en este sitio.
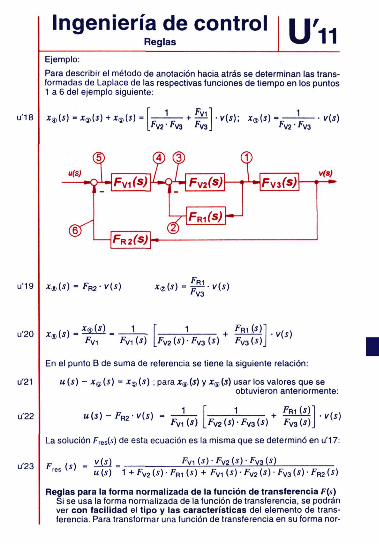
Ingeniería de control Reglas Un
Ejemplo: Para describir el método de anotación hacia atrás se determinan las transformadas de Laplace de las respectivas funciones de tiempo en los puntos 1 a 6 del ejemplo siguiente:
«»(«)-»s(*) »*»( ' )■ , - t ^ U ( i ) ; xg,[s)- — ^ - — - vis) I Í"V2 • rV3 tV3 I Í'V2 • fV3
<sT
Fvi(s) W . Fnfc) —f1»Fv3(s)
FR2(s) -
FM(S) -
v(s)
X®(S) ' ■vis) x9{s)-jP-v(s) A V3
XQÍS) -'■ 1 1
Fv,is) l/va (*)• '«(*) FvaU) vis)
En el punto B de suma de referencia se tiene la siguiente relación:
u(í) - x®is) - -tjjlí) ; paraxm(j) y ( s ) usar los valores que se obtuvieron anteriormente:
U(í) ■ir( i) 1 1 fR1 M • V( í ) FVi(í) [Fv2is)-Fv3is) Fv3is)¡
La solución FresC1) de esta ecuación es la misma que se determinó en u'17:
is) FvAs)-Fv2is)-Fv3is) _ vM " ÍS) 1 + FV2 ( í ) • FR1 ( i ) + FV1 ( i ) • >V2 (*) • fv3 (*) • f R2 (*>
Reglas para la forma normalizada de la función de transferencia F(s) Si se usa la forma normalizada de la función de transferencia, se podrán ver con facilidad el tipo y las características del elemento de transferencia. Para transformar una función de transferencia en su forma ñor-
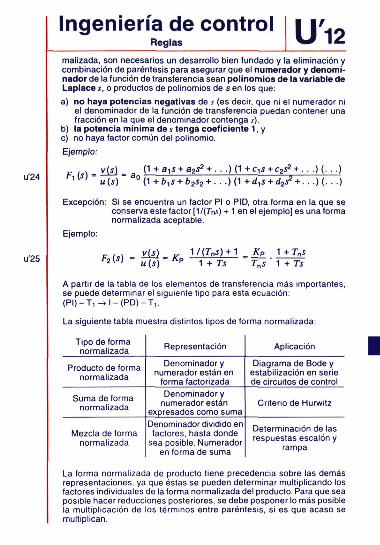
Ingeniería de control Reglas U'12
malizada, son necesarios un desarrollo bien fundado y la eliminación y combinación de paréntesis para asegurar que el numerador y denominador de la función de transferencia sean polinomios de la variable de Laplace t, o productos de polinomios de s en los que:
a) no haya potencias negativas de s (es decir, que ni el numerador ni el denominador de la función de transferencia puedan contener una fracción en la que el denominador contenga s).
b) la potencia mínima de s tenga coeficiente 1 , y c) no haya factor común del polinomio.
Ejemplo:
F,(i) _ v(s) _ (1 + a,s + a2s2 + . " ( i ) (1 +b^s + b2s2 +.
■ ) ( H - c ^ + Czi*+ . . . ) (■ To+^T+dj?+.. .)(■ )
Excepción: Si se encuentra un factor Pl o PID, otra forma en la que se conserva este factor [1/(7>u) + 1 en el ejemplo] es una forma normalizada aceptable.
Ejemplo:
t M i l í i „ 1/(7-nj) + 1 _ KP 1 + T„s Fí(s) " u{s)=Kp ^+Ts Tns' T T W
A partir de la tabla de los elementos de transferencia más importantes, se puede determinar el siguiente tipo para esta ecuación: ( P I ) - T , - » I - ( P D ) - T , .
La siguiente tabla muestra distintos tipos de forma normalizada:
Tipo de forma normalizada
Producto de forma normalizada
Suma de forma normalizada
Mezcla de forma normalizada
Representación
Denominador y numerador están en
forma factorizada Denominador y
numerador están expresados como suma Denominador dividido en
factores, hasta donde sea posible. Numerador
en forma de suma
Aplicación
Diagrama de Bode y estabilización en serie de circuitos de control
Criterio de Hurwitz
Determinación de las respuestas escalón y
rampa
La forma normalizada de producto tiene precedencia sobre las demás representaciones, ya que éstas se pueden determinar multiplicando los factores individuales de la forma normalizada del producto. Para que sea posible hacer reducciones posteriores, se debe posponer lo más posible la multiplicación de los términos entre paréntesis, si es que acaso se multiplican.
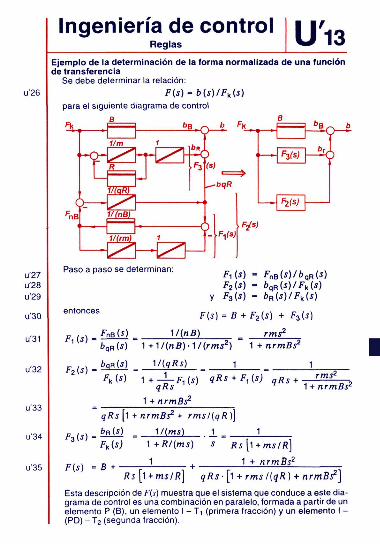
Ingeniería de control Reglas U'13
Ejemplo de la determinación de la forma normalizada de una función de transferencia
Se debe determinar la relación: F ( s ) - 6 ( í ) / F k ( í )
para el siguiente diagrama de control B
—•"
FnB
1 »■
1/m
"I
1/ínB)
Vírm) 1 y
b Fx.
■bqR
Fi<s)
F3(s) Ó
fáfsj
/ys;
Paso a paso se determinan: * l ( í ) " F„B(i) /6qR(i) F2(s) - 6 q R ( í ) / F k ( i )
y F3(s) - 6 R ( i ) / F k ( i )
F ( i ) - B + f 2 ( í ) + F3(s)
F, (i) " FnB (S) bqfíU)
U(nB) l+M{.nB)-M(rms*) 1 + nrmBs2
1 1
g f i j * 1 + nrmBs2
1 + nrmBs2
F 3 ( í ) -
qRs ¡1 + nrmBs2 + rms/(qR)
bp(s) 1 / (mi ) 1 1
F( i ) - JJ +
1 + R / ( m i )
1
í R s [ l + m i / R ]
1 + nrmBs2
Rs [1 + m s / R ] ? R í - [ l +rms/{qR) * nrmBs2)
Esta descripción de F(s) muestra que el sistema que conduce a este diagrama de control es una combinación en paralelo, formada a partir de un elemento P (B), un elemento I - T, (primera fracción) y un elemento I -(PD) - T2 (segunda fracción).
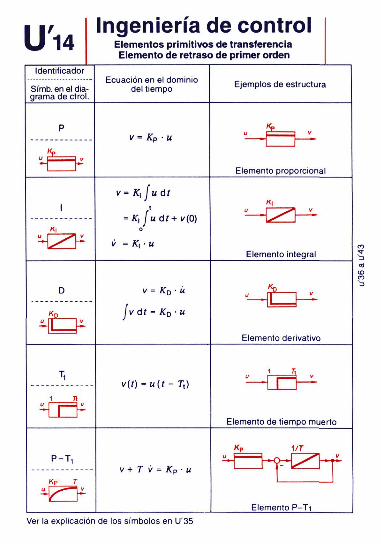
U'14 Identificador
Símb. en el diagrama de ctrol.
P
! H — H =
i
«i
D
Tt
1 71
P-T,
KP r
Ingeniería de control Elementos primitivos de transferencia Elemento de retraso de primer orden
Ecuación en el dominio del tiempo
v - KP • u
v= K,fudt
= tf, J u d f + v(0) 0
v = K, ■ u
v = KD ■ ü
Jvdt- KD-u
v(t) = u{t-Tt)
v + T v = KP ■ u
Ejemplos de estructura
Elemento proporcional
«i
Elemento integral
Elemento derivativo
1 7",
Elemento de tiempo muerto
Kp VT
Elemento P-Ti Ver la explicación de los símbolos en U'35
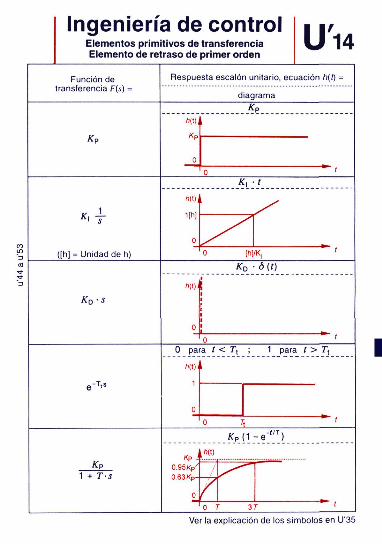
Ingeniería de control Elementos primit ivos de t ransferencia E lemento de retraso de pr imer orden
Función de transferencia F ( J ) =
KP
([h] = Unidad de h)
KD-s
e-T,s
Kp 1 + Ts
U'14 Respuesta escalón unitario, ecuación h{t) =
diagrama
* P ft(t)
Kp
0
i
0 - r
f(t)J
1[h]
0
.
0 [h]/K| '
KD ■ d (t)
/i(t).
0
i
0 ■ r
0 para t < Tx ; 1 para t > Tt
/i(t)i
1
0
l
0 7¡ - r
/ C P ( 1 - e - " T )
K P J O.SSKp^ 0.63 Kp-
0
i"(t)
0 T 3T - r
Ver la explicación de los símbolos en U'35
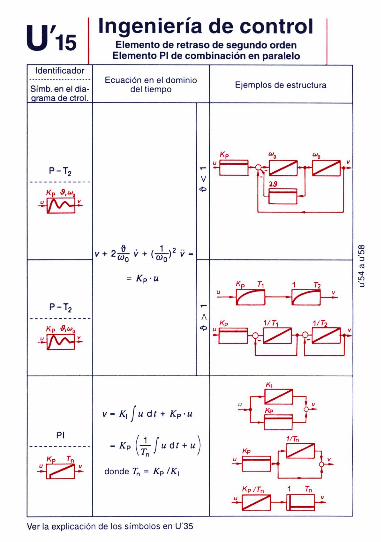
U'15 Ingeniería de control Elemento de retraso de segundo orden
Elemento Pl de combinac ión en paralelo
Identlficador
Símb. en el dia-qramadectrol.
Ecuación en el dominio del tiempo Ejemplos de estructura
P-T,
KP 9,u,
v+2<k* + (ik)2" = Kp-u
P-T,
KP %
23
wo
^ í
Kp Ti 1 Ti
■-M Kp 1/r, ft^JÍ
v i
Pl
Kp Tn
v= K¡ judt + Kp-u
= KP (jrjudU-u
donde Tn = KP /ÍC| ^ KP /Tn 1 T„
Ver la explicación de los símbolos en U'35
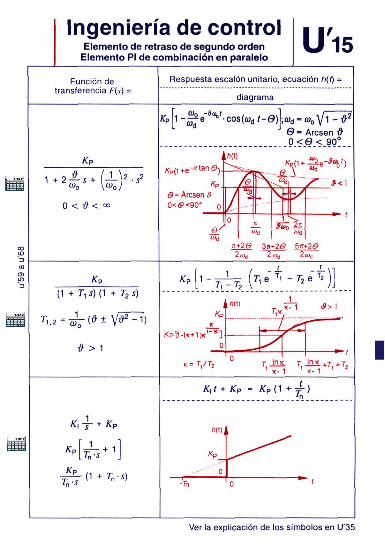
Ingeniería de control Elemento de retraso de segundo orden
Elemento Pl de combinación en paralelo U'15
Función de transferencia F(.v) =
Respuesta escalón unitario, ecuación h(í) ■
diagrama
S ■ Arcsen # 0 <G < 90°_
KP
'♦'i»* ¿l '- ' 0 < i? < °°
Kpfi+e-*1 3"6 ' )
0 - Arcsen s 0<i9<90° o
rn-20 3m-20 5T+20 2 ca0 2 ca0 2 ca0
/CP 1
(1 + 7, i) (1 + T2 s) T, -T2
7, e" T ' - 72 e T2
' 1 , 2 " £¡J i-(*±VF3T) KpD-Oc+l)*"" ]
0 > 1 T JTIK. T Jn_K + T + T
' K- 1 ' K- 1 '
K,I + Kp - Kp(-\ + = r )
/C| 5
K 1
P[Tns KP
T.-s d + 7n-í)
Ver la explicación de los símbolos en U'35
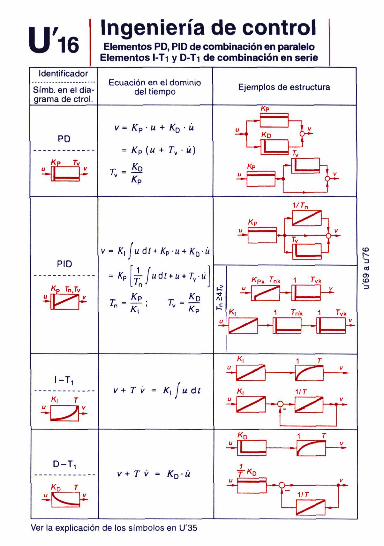
U'16 Ingeniería de control Elementos PD, PID de combinación en paralelo
Elementos l-Ti y D-T1 de combinación en serie Identificador
Símb. en et día-grama de ctrol.
Ecuación en el dominio del tiempo Ejemplos de estructura
PD v = K P ■ u + KD ■ ú
= KP(u + Tv ■ ú) K p 7»
T, = KD
u
Kp
KD HL Kp
~Y
"h
Hl—h ■
Kp
PID
Kp T„,Tv
v = K{ iuÓt + KpU + KQu
T Kp, _ y D
' " ' Af, ' ' " Kp
Kpk r nk 1 7~vk
1 nk 1 rvk
l -T , v+ T
«i r V = K , f u
^ ^A . át
" - ^
D-T,
KD L f t f i = Kn ■ ú
KD 1 T
T~KD
u I n v
Ver la explicación de los símbolos en U'35
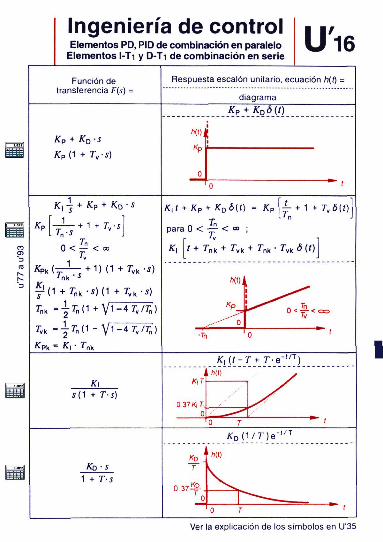
Ingeniería de control Elementos PD, PID de combinación en paralelo
Elementos l-Ti y D-Ti de combinación en serie
Función de transferencia F(s) -
Kp + /CQ 'S
KP (1 + 7"»I)
K, y + KP + Ka ■ *
o < 5 ¡ <=o
Kp* 1
f«(1 r„k
— l — - + 1 ) ( 1 + r v k - i ) ' n k ' *
+ rnk-*)(i + rvk-i) -■2-rn(i + Vi-4rv /rn) . 1 T 11 A / * . T / , . ' .
ívk " 2 ' l l ' V ' " ' * J v " n J
^Pk " ^ I ' 7"nk
K¡ j ( 1 + T-s)
Í ó - S 1 + T-S
U'16 Respuesta escalón unitario, ecuación h(t) =
diagrama KP + KDS[t)
l(t),
Kp
0
¡
! 1
0 "" '
/c, Í + /cP + /cD<5(0 - x P [ ^ - + i + r , í ( t ) ]
para 0 < ■— < °° I
K, [t + rnk + rvk + rnk ■ r¥k <5 (/)]
im,
"' 0 ^ ^ ^ 0<-£-<oo 7v
■Jh o
K,(r-r + r-e""T)
«7-
0.37 KiTN
0
, 'l(t) >
b T / C D ( 1 / 7 ) e - , / T
J
0 3 7 K D
0
d(t)
0 T ' '
Ver la explicación de los símbolos en U'35
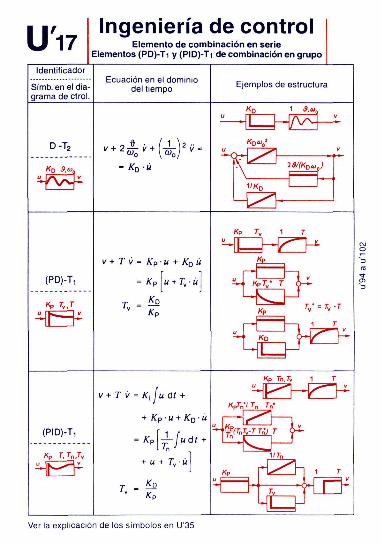
U'17 Ingeniería de control Elemento de combinación en serie
Elementos (PD)-Ti y (PID)-Ti de combinación en grupo
Identificador
Símb. en el dia-grama de ctrol.
Ecuación en el dominio del tiempo Ejemplos de estructura
D-T2
«D 9.m KD-Ú
KD 1 S.t>.
>W IV A \
l&(KDu„!
(PD)-T,
v+T V- Kpu + Knú
KP u + 7"„ ■ u
Kp 7» 1 T
4 KPV T
Kp T„,T T _ Ko v - 'v
1 T
~ _rfe—- jH ZP""
(PID)-T,
Kp 7,Tn,r»
• JC , / íH
+ KP-
-KPUfuc
v+Tv-K,juát +
+ Kp ■ u + Ka ■ ú
át +
+ u + 7"v • ú
K
Kp rnTv 1 T
KJ¿IT„ T„-
T„ -l D
Ver la explicación de los símbolos en U'35
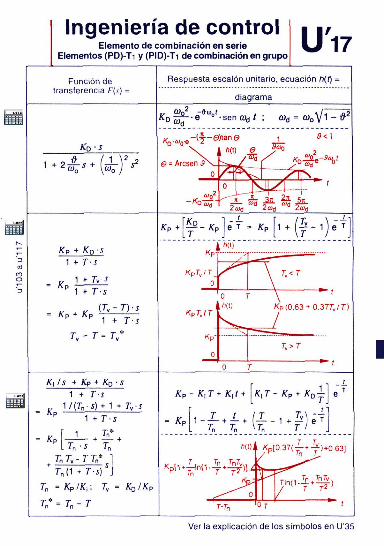
Ingeniería de control Elemento de combinación en serie
Elementos (PD)-Ti y (PID)-Ti de combinación en grupo U'17
Función de transferencia F(s) -
Respuesta escalón unitario, ecuación h(t) --
KD co0
2
e"*"»'
diagrama
•sen <Uy t ; <o6 = <"oV1 -#2
KDs
1 + 2 T T - J +
k /i(t) e í0* 2
ATP+[|2-/Cp]eT = Kp[l + ( ^ - l ) e T
Kp + KQ ■ s 1 + Ts
„ 1 + 7v S
= f<P + K
1 + 7-5
(7V - 7) ■ s
1 + 7 f
7 = 7V*
KpTJT
KpJJT
o r .''(•> Kp(0.63 +0.377»/T)
7
K, /5 + Kp + Ka-s 1 + 7- j
1 / (7 n s ) + 1 + 7v-5
L T„ ■ S 7n
7„7 v -77„*
Kp - K, T + K, t + \K¡ T - Kf + K0 1
r„(i - 7 - i )
7„ = Ap/K¡; 7V = Kn/Kp
7n* = 7n - 7
1-X + ^ + T„ \ 7. 7 /
/l(t),i Kp[0,37( —+-^)*0.63] / 'n '
K p h ^ l n d - ^ ^ L
^ n ( 1 - i . M )
Ver la explicación de los símbolos en U'35
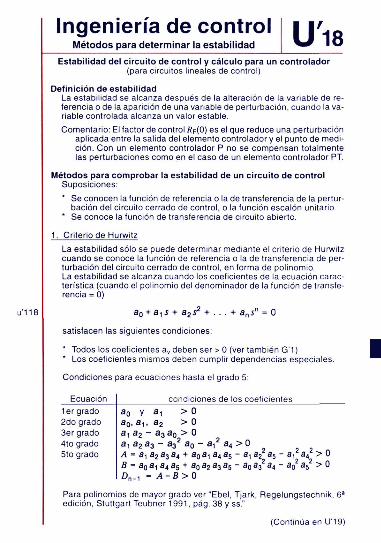
Ingeniería de control Métodos para determinar la estabilidad
Estabilidad del circuito de control y cálculo para un controlador (para circuitos lineales de control)
Definición de estabilidad La estabilidad se alcanza después de la alteración de la variable de referencia o de la aparición de una variable de perturbación, cuando la variable controlada alcanza un valor estable.
Comentario: El factor de control RF(0) es el que reduce una perturbación aplicada entre la salida del elemento controlador y el punto de medición. Con un elemento controlador P no se compensan totalmente las perturbaciones como en el caso de un elemento controlador PT.
Métodos para comprobar la estabilidad de un circuito de control Suposiciones:
* Se conocen la función de referencia o la de transferencia de la perturbación del circuito cerrado de control, o la función escalón unitario.
* Se conoce la función de transferencia de circuito abierto.
1. Criterio de Hurwitz
La estabilidad sólo se puede determinar mediante el criterio de Hurwitz cuando se conoce ia función de referencia o la de transferencia de perturbación del circuito cerrado de control, en forma de polinomio. La estabilidad se alcanza cuando los coeficientes de la ecuación característica (cuando el polinomio del denominador de la función de transferencia = 0)
u'118 ao + 3 , 5 + a 2 / + . . . + a n í " = 0
satisfacen las siguientes condiciones:
* Todos los coeficientes av deben ser > 0 (ver también G'1) * Los coeficientes mismos deben cumplir dependencias especiales.
Condiciones para ecuaciones hasta el grado 5:
Ecuación 1er grado 2do grado 3er grado 4to grado 5to grado
condiciones de los coeficientes a0 y a, > 0 a0, a-,, a2 > 0 a-i a2 - 3$3Q > 0 a, a2 a3 - a3
2 a0 - a,2 a4 > 0 A = a,a2 a3 a4 + a0 a¡ a4 a5 - a, a2
2 a¡- a,2 a42 > 0
B = a0a,ata5 + aaa2a3a5 - a0a32a4 - a0
2a52 > 0
D„_, = A-B > 0
Para polinomios de mayor grado ver "Ebel, Tjark, Regelungstechnik, 6-ediclón, Stuttgart Teubner 1991, pág. 38 y ss."
(Continúa en U'19)
U'18
Ingeniería de control Métodos para determinar la estabilidad
Ventaja: Este método conduce a una definición rápida y exacta acerca de la estabilidad de determinado circuito de control.
Desventaja: No proporciona información acerca de la resiliencia de un circuito de control a la inestabilidad, del resultado de cambios de sus características ni de su comportamiento dinámico; por estas razones generalmente se prefieren otros métodos.
2. Reducción a polinomios únicos Se transforma la función de transferencia de referencia o de perturbación en una suma de polinomios únicos de 2o. orden como máximo (ver el desarrollo en fracciones parciales en B'1):
En un circuito de control estable sólo hay elementos de transferencia estables. Estos son generalmente elementos puros P o retrasados P y elementos retrasados PD.
Si hay un elemento I, l-T, o l-(PD) el circuito de control se volverá inestable.
Ventajas: En los casos estable e inestable, la evaluación de la referencia transformada o de la función de transferencia de perturbación conduce a una conclusión acerca del grado de estabilidad o inestabilidad del circuito de control. Para obtener esta información, deben sobreponerse las funciones de transferencia de todos los elementos sencillos.
Desventajas: No es posible observar el efecto de la introducción de un elemento de control definido ni saber cuál de las características se debe cambiar para obtener el comportamiento requerido de un circuito de control. Después de cada cambio al elemento de control se debe hacer un nuevo cálculo de la transición aritmética del circuito de control abierto al circuito de control cerrado.
3. Criterio de Nyquist Este criterio establece que el circuito (cerrado) de control es estable cuando el lugar geométrico de la respuesta en frecuencia F¡,(\io) del circuito de control abierto - en el sentido de los valores mayores de la frecuencia angular ai- siempre tiene a su izquierda el punto crítico -1 en el plano complejo. Mientras mayor sea la distancia entre el lugar geométrico de respuesta en frecuencia y el punto crítico -1 , más robusto será el circuito de control respecto a los efectos de variaciones inesperadas en los datos característicos.
Una medida de qué tanto se acerca el sistema a la inestabilidad se expresa con dos valores característicos:
U'19
(Continúa en U'20)
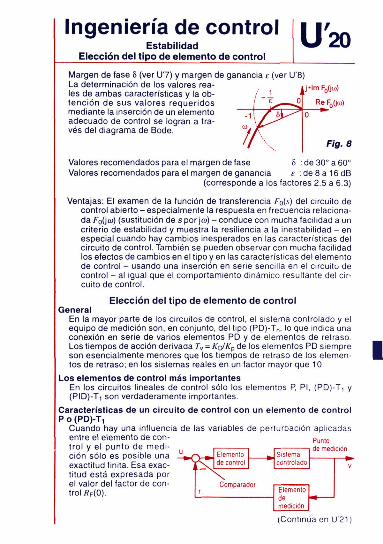
Ingeniería de control Estabi l idad
Elección del t ipo de e lemento de control U'20
Margen de fase 8 (ver U'7) y margen de ganancia c (ver U'8) La determinación de los valores reales de ambas características y la obtención de sus valores requeridos mediante la inserción de un elemento adecuado de control se logran a través del diagrama de Bode.
aj-lmF0(Kü
Re F„(jco)
Fig.B
Valores recomendados para el margen de fase 8 : de 30° a 60° Valores recomendados para el margen de ganancia e : de 8 a 16 dB
(corresponde a los factores 2.5 a 6.3)
Ventajas: El examen de la función de transferencia Fa(s) del circuito de control abierto - especialmente la respuesta en frecuencia relacionada FO(JÚJ) (sustitución de sporjw) -conduce con mucha facilidad a un criterio de estabilidad y muestra la resiliencia a la inestabilidad - en especial cuando hay cambios inesperados en las características del circuito de control. También se pueden observar con mucha facilidad los efectos de cambios en el tipo y en las características del elemento de control - usando una inserción en serie sencilla en el circuito de control - al igual que el comportamiento dinámico resultante del circuito de control.
Elección del t ipo de e lemento de control General
En la mayor parte de los circuitos de control, el sistema controlado y el equipo de medición son, en conjunto, del tipo (PD)-Tn, lo que indica una conexión en serie de varios elementos PD y de elementos de retraso. Los tiempos de acción derivada 7V = KQ/KP de los elementos PD siempre son esencialmente menores que los tiempos de retraso de los elementos de retraso; en los sistemas reales en un factor mayor que 10.
Los elementos de control más importantes En los circuitos lineales de control sólo los elementos P, Pl, (PD)-Ti y (PID)-Ti son verdaderamente importantes.
Características de un circuito de control con un elemento de control P o (PD)-T,
Cuando hay una influencia de las variables de perturbación aplicadas entre el elemento de control y el punto de medición sólo es posible una exactitud finita. Esa exactitud está expresada por el valor del factor de control fiF(0).
Punto
^v Elemento de control
\ r
Sistema controlado
Elemento de medición
V
(Continúa en U'21)

Ingeniería de control Determinación gráfica de un controlador
Características de un circuito de control con un elemento de control Pl o (PID)-T,
Es posible compensar totalmente la influencia de las variables de perturbación aplicadas entre el elemento de control y el punto de medición. Si el sistema controlado contiene un elemento I sin variables de perturbación con retroalimentación negativa aplicadas entre la salida del elemento I en el sistema controlado y el punto de medición, habrá compensación completa aunque no haya factor I.
Nota: Nunca se pueden compensar las variables de perturbación aplicadas entre el punto de medición y la salida del elemento controlador.
Determinación gráfica de un controlador l ineal basada en el criterio de Nyquist
General El procedimiento se lleva a cabo por medio del diagrama de Bode. Para este diagrama son necesarias tanto la construcción de la conexión en serie del sistema controlado como el equipo de medición, al igual que la construcción del elemento de control. El diagrama de Bode de todo el circuito se determina sumando (multiplicando) la amplitud y la fase de la respuesta de los elementos de transferencia en serie sencilla (ver U'22 y U'23). Esto es posible debido a la naturaleza logarítmica de la amplitud de la respuesta, después de la conversión a dB. Para el trazo gráfico se debe usar papel semilogarítmico con 4 décadas en el eje x.
Procedimiento:
* Determinar el área de la frecuencia angular w para la cual se debe trazar el diagrama de Bode; graficar todos los puntos de cruce de interés.
' Sólo se permiten factores de respuesta en frecuencia del tipo I, P, D, Tt, P-Ti, PD y P-T2, con atenuación ü < 1 (ver U'22 y U'23)
* Después de extraer el factor I, los elementos Pl se convierten a una estructura l-PD y los elementos PID con Tn/Tv > 4 se convierten a una estructura l-PD-PD.
* Todos los coeficientes de acción en serie, el Integral - (Ki), el Proporcional - (Kp) o el Derivado (KD) se resumen en un coeficiente de acción.
* Se representa la amplitud de la respuesta. * Se representa la fase de la respuesta. * Se termina mediante el elemento de control.
Las tablas de las páginas U'22 y U'23 muestran los diagramas de Bode para elementos P, I, D, Tt, P-T,, P-T2 y PD. Estos diagramas se utilizan para determinar la amplitud y la fase de la respuesta.
U'21
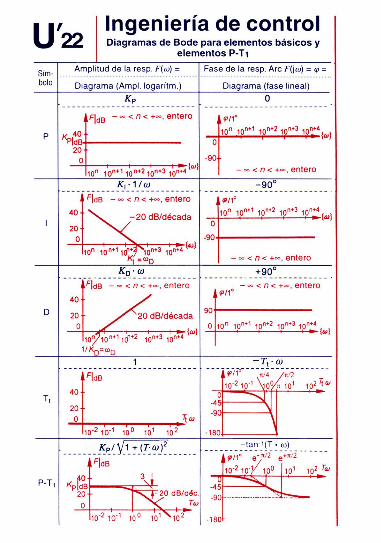
U'22 Ingeniería de control Diagramas de Bode para e lementos básicos y
e lementos P-Ti
Símbolo
Amplitud de la resp. F(w) -.
Diagrama (Ampl. logarítm.J
Fase de la resp. Are F(\(o) = íp =
Diagrama (fase lineal) KP
¡ñas
K, .40 i P|dB
2 0 -0
» < n < +°°, entero
10n 1Qn+1 10n*210n+3 1Qrw4 M
[í>/1°
0
-90
10n 10
"
n+1 <Qn+2 -.QO+3 ^*A
» < n < +« , entero
M
KrMa - 9 0 °
. i FldB - «• < n < +°°, entero
-20 dB/década
a " 1
1Qn ,0n»1 ,0n.2 1()f»3 1Qn*4 0>)
> < n < +« , entero KD-a> +90°
- i^ldB - =*> < n < +« , entero , M
> < n < +«<, entero
10" 10n*1 10n*2 10n*3 10n*4 , , 1 1 1 i -» - («s!
i^ldB - T , - c o
lf»/í° ñ~4 10'2 10'1 \o°/z 10' 10'
10"210"1 10° 101 102
KP_/y-\ +_(Tuf
P-T,
tan ' (T • (o) ,l?/1° e".*2 e"1 '2"" 10'2 10 ' / 10° 101 102
10"210"' 10° 10 1 N 10 2
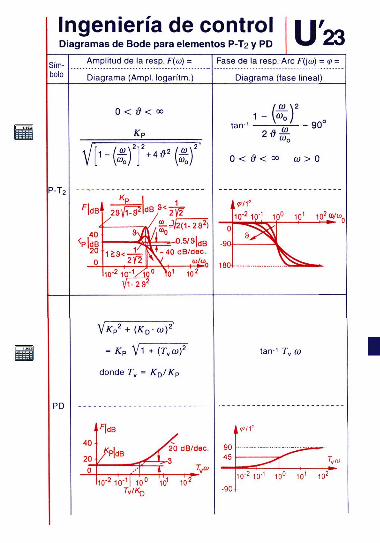
Ingeniería de control Diagramas de Bode para e lementos P-T2 y PD U'23
Símbolo
Amplitud de la resp. F(w) =
Diagrama (Ampl. logarítm.)
Fase de la resp. Are F(ja>) = <p -
Diagrama (fase lineal)
0 < # < 00
KP tan-' - ( * ) ' 90°
m+^& 2 # —
0 < # < °° cu > 0
P-T2
10~2 10'1 10° 101 102«>M
10^10' 'X10" I01 10' V1-232
V ^ p 2 + (/CD-6U)2 '
= KP V i + (7"vcu)2
donde 7"v - KD/ KP
t a n ' Tv a)
PD
l F | c 40
/Pjd 20 dB/dec. U-3
10"210"'| 10° 101 102
VK¿>
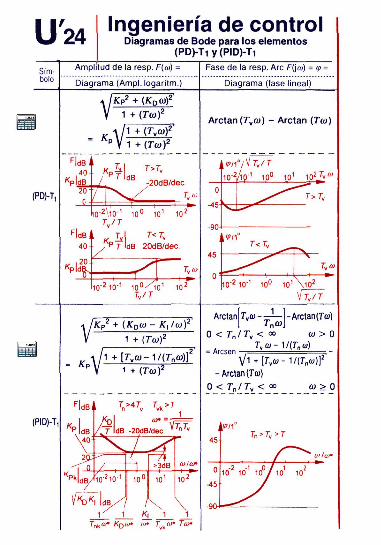
U'24 Ingeniería de control Diagramas de Bode para los elementos
(PD)-Tiy(PID)-Ti
Símbolo
Amplitud de la resp. F(a>) =
Diagrama (Ampl. logarítm.)
Fase de la resp. Are F(¡a¡) = V =
Diagrama (fase lineal)
V KP2 + (KDco)2
1 + (Tco)2
( 7 » z Arc tan (7 " V ID ) - A rc tan (Tco)
(Tco)*
(PD)-T,
KpM T>TV p T IdB -20dB/dec
(l«p/iyvvv/r 10'2/1P"1 10° 101 1027"v'"
hO'2\ io4 io° io1 102
FldBJ 40-
*• I 2 0 -XpIdE^
1 K M r < 7 ;
y T IdB 20dB/dec.
x t S \ T..„, 1 1 P ¿
10"2 10"1 1 0 0 / 1 0 1 102
n w f
7v/r
Xp^ + ( X D < U - Í C Í / Í Ü T
1 + (Tco)2
Wlf[r yQ)-1/(T na>)] ' P V 1 +(Tcu)2
Arctan 7 > - — i — -Arctan(Teu)
0 < r n / 7 " v < = » <u > 0 7 > - 1 / ( 7 > )
- Arcsen = ; -Vl + [ 7 > - 1 / ( 7 » ] 2
- Arctan (Tu) 0 < T . / 7"v < °° cu > 0
FldBÁ rn>4r r ^ w
(PID)-T.
n o K i idB, 1 X 1 K[_ _1 Í_
45
0
^ 5
-90
[f/1° r„ > rv > r
- 2 - 1 0 / 1 10 10 10 / 10 102
O) l(D
Ingeniería de control Ampl i tud de la respuesta
Método para representar la amplitud de la respuesta del circuito completo
Nota preliminar: los puntos de quiebre de la amplitud de la respuesta se marcan con flechas en la parte superior de la gráfica.
Una flecha con una punta hacia abajo caracteriza una pendiente de - 2 0 dB/década que se obtiene mediante un factor P-T, (ver U'l 4) en el punto 1/7".
Una flecha con dos puntas hacia abajo caracteriza una pendiente de - 4 0 dB/década que se obtiene mediante un factor P-T2 (ver U"I5), c o n d < 1; los factores P-T2 con d > 1 se dividen en dos factores P-T,.
Los factores PD (+20 dB/década en el punto 1/7"„) con pendiente positiva se caracterizan con puntas de flechas hacia arriba.
Después de estimar la variación de la amplitud de la respuesta dentro de las 4 décadas de la frecuencia angular (o, se debe escoger la escala de tal modo que la zona de interés aparezca con la máxima resolución posible; el origen será definido por el valor máximo esperado de la amplitud de la respuesta.
A continuación se determina el valor de la amplitud de la respuesta en el margen izquierdo del dibujo. Si la conexión en serie por representar contiene un factor I o D, el valor y la pendiente iniciales se determinan por I o D; en cualquier otro caso, por el factor P. El valor inicial se determina usando F l d B = 20 log(Ayro) (factor I), F l a B = 20 log KDu> (factor D) o FldB = 20 log KP (factor P); véase U'22 y U'23.
Comentario: Se deben omitir aquí las unidades físicas de K¡, Kc o K>, para añadirlas después al hacer la evaluación.
El gradiente de la amplitud de la respuesta hasta el primer quiebre es -20 dB/década (factor I), +20 dB/déc. (factor D) o 0 (factor P). La curva asin-tótica de la amplitud de la respuesta se traza de un punto de quiebre al siguiente; para ello se deben considerar los cambios anteriores, que corresponden a las flechas indicadas. El factor T t no influye sobre la amplitud de la respuesta. Por último, se hacen correcciones en los puntos de quiebre: cuando se usa el factor P-T,, la curva asintótica se corrige en los puntos <OE/2 y 2COE en -1 dB, y en la frecuencia angular de quiebre <o^ en -3 dB.
Cuando se usa el factor PD (inverso del factor P-T,), se deben hacer las correcciones correspondientes en el punto de quiebre UE = 1/7V, de abajo hacia arriba, (es decir, + 3 dB).
Cerca del punto de quiebre de un factor P-T2 con ü < 1, la curva asintótica se corrige en -10 log [1 -(CÚ/ÍÜO)2 + 2 ( 0 (O/CÚ0)2].
U'25
Ingeniería de control Fase de la respuesta
Representación de la fase de la respuesta La fase de la respuesta del circuito completo se determina sumando las fases de las respuestas individuales de los elementos de transferencia conectados en serie, o de los factores de respuesta en frecuencia.
Los factores individuales contribuyen con los siguientes valores (ver también U'22 y U'23):
p 1 D T, P-T, PD
P-T2
Pl =
Factor
con 0 < 1
- P D
Fase de la respuesta
0° - 9 0 ° + 90° - 7 , 0 )
- t a n - ' 7w + t a n 1 T„ CU
tan-1 90 2i°> c ú / t ü 0
- 90° + t a n 1 Tn a
Comentario: mientras que el factor P no tiene efecto alguno, la contribución del factor T, es muy importante y aumenta con o>.
Nota: Después de agrupar los factores constitutivos en una suma, a continuación se determinan los valores de la fase de la respuesta, por ejemplo, usando la memoria de una calculadora de bolsillo. En general, la fase de la respuesta del factor T t se debe sustituir con el factor 1807n para obtener un resultado en grados.
Por último, se deben elegir la escala y el origen de la gráfica de la fase de la respuesta de tal manera que la zona de mayor interés aparezca con la máxima resolución posible. La fase de la respuesta se traza en el mismo diagrama que el de la amplitud de la respuesta. La escala del eje y se muestra en el margen derecho del dibujo.
Determinación del elemento de control Problema: El resultado debe ser tal que se satisfagan los requisitos del
margen de fase 6 y del margen t de ganancia .
Considerando la figura 8 de U'20, esto quiere decir que el indicador de respuesta en la frecuencia del circuito abierto de control final cerca del punto cr i t ico-1 debe satisfacer dos requisitos: en frecuencia angular con amplitud 1 (frecuencia angular de cruce de ganancia) la distancia de fase en la parte negativa del eje real debe ser cuando menos 5, y a la frecuencia angular donde la fase es -180° (la frecuencia angular de cruce de fase), la amplitud debe de ser como máximo, 1/E.
(Continúa en U'27)
U'26
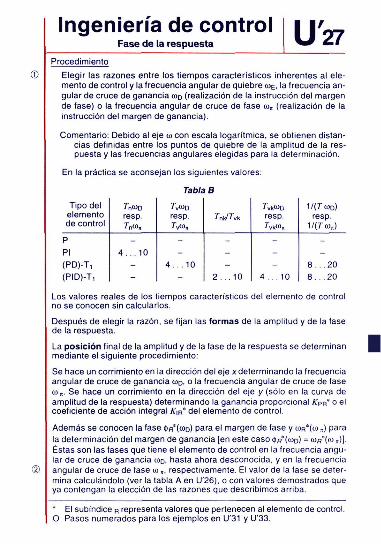
Ingeniería de control Fase d e la respuesta U'27
Procedimiento
Elegir las razones entre los tiempos característicos inherentes al elemento de control y la frecuencia angular de quiebre <oE, la frecuencia angular de cruce de ganancia cou (realización de la instrucción del margen de fase) o la frecuencia angular de cruce de fase ro, (realización de la instrucción del margen de ganancia).
Comentario: Debido al eje ro con escala logarítmica, se obtienen distancias definidas entre los puntos de quiebre de la amplitud de la respuesta y las frecuencias angulares elegidas para la determinación.
En la práctica se aconsejan los siguientes valores:
Tabla B
Tipo del elemento de control
P Pl (PD)-T, (PID)-T,
7n<AD resp .
4 . . . 1 0
7V<OD resp. TvTOn
4 . . . 1 0
W T v k
2 . . 1 0
7vkroD resp. 7vkTO„
4 . . 1 0
1 / (1 COD) resp .
i/(r<o»)
8 . . . 20 8 . . . 20
Los valores reales de los tiempos característicos del elemento de control no se conocen sin calcularlos.
Después de elegir la razón, se fijan las formas de la amplitud y de la fase de la respuesta.
La posición final de la amplitud y de la fase de la respuesta se determinan mediante el siguiente procedimiento:
Se hace un corrimiento en la dirección del eje x determinando la frecuencia angular de cruce de ganancia roo, o la frecuencia angular de cruce de fase ro„. Se hace un corrimiento en la dirección del eje y (sólo en la curva de amplitud de la respuesta) determinando la ganancia proporcional /í>R* o el coeficiente de acción integral K\R* del elemento de control.
Además se conocen la fase 0R*(C£)D) para el margen de fase y roR*(ro „) para la determinación del margen de ganancia [en este caso 4>fl*(wD) = «JH*(M „)]. Éstas son las fases que tiene el elemento de control en la frecuencia angular de cruce de ganancia WD, hasta ahora desconocida, y en la frecuencia angular de cruce de fase co K, respectivamente. El valor de la fase se determina calculándolo (ver la tabla A en U'26), o con valores demostrados que ya contengan la elección de las razones que describimos arriba.
* El subíndice R representa valores que pertenecen al elemento de control. O Pasos numerados para los ejemplos en U'31 y U'33.
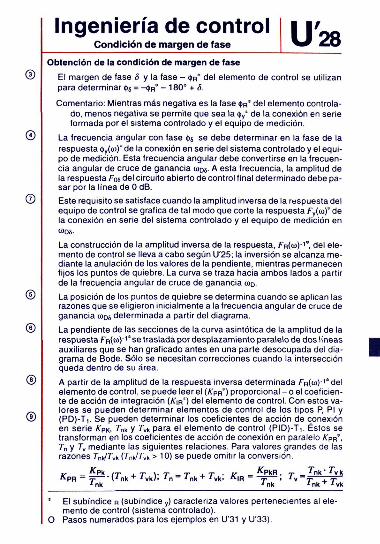
Ingeniería de control Condición de margen de fase U'28
Obtención de la condición de margen de fase El margen de fase S y la fase - <IR* del elemento de control se utilizan para determinar <|>s = -<t>R* - 180° + <5.
Comentario: Mientras más negativa es la fase <t>R* del elemento controlado, menos negativa se permite que sea la 4>y* de la conexión en serie formada por el sistema controlado y el equipo de medición.
La frecuencia angular con fase fa se debe determinar en la fase de la respuesta 4>y(ü>)* de la conexión en serie del sistema controlado y el equipo de medición. Esta frecuencia angular debe convertirse en la frecuencia angular de cruce de ganancia mD8. A esta frecuencia, la amplitud de la respuesta Fos del circuito abierto de control final determinado debe pasar por la línea de 0 dB. Este requisito se satisface cuando la amplitud inversa de la respuesta del equipo de control se gráfica de tal modo que corte la respuesta Fy(<o)* de la conexión en serie del sistema controlado y el equipo de medición en 0>D5-
La construcción de la amplitud inversa de la respuesta, FR((o)-i*, del elemento de control se lleva a cabo según U'25; la inversión se alcanza mediante la anulación de los valores de la pendiente, mientras permanecen fijos los puntos de quiebre. La curva se traza hacia ambos lados a partir de la frecuencia angular de cruce de ganancia O>D-La posición de los puntos de quiebre se determina cuando se aplican las razones que se eligieron inicialmente a la frecuencia angular de cruce de ganancia toD6 determinada a partir del diagrama. La pendiente de las secciones de la curva asintótica de la amplitud de la respuesta FR(io)-1*se traslada por desplazamiento paralelo de dos líneas auxiliares que se han graficado antes en una parte desocupada del diagrama de Bode. Sólo se necesitan correcciones cuando la intersección queda dentro de su área. A partir de fa amplitud de la respuesta inversa determinada FR(co)-i*del elemento de control, se puede leer el (A>R*) proporcional - o el coeficiente de acción de integración (Km*) del elemento de control. Con estos valores se pueden determinar elementos de control de los tipos P, Pl y (PD)-T,. Se pueden determinar los coeficientes de acción de conexión en serie A>K, Fnk y Fvk para el elemento de control (PID)-Tt. Éstos se transforman en los coeficientes de acción de conexión en paralelo Kpfí*, T„ y Tv mediante las siguientes relaciones. Para valores grandes de las razones Fnk/7\,k (W7»i
K P R - r— 'i
Fnk/7'uk (Fnk/7'vk > 10) se puede omitir la conversión.
í p k , T - j . T V T - T J.T ■ V - ^ P * R . T - ^ n k ' ^ v K nk ' nk ' n k + l vk
El subíndice R (subíndice y) caracteriza valores pertenecientes al elemento de control (sistema controlado). Pasos numerados para los ejemplos en U'31 y U'33).
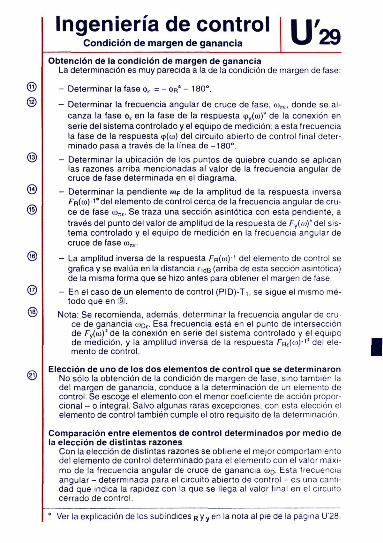
Ingeniería de control Condic ión de margen de ganancia U'29
Obtención de la condición de margen de ganancia La determinación es muy parecida a la de la condición de margen de fase:
- Determinar la fase <J>t = - <Í>R* - 180°.
- Determinar la frecuencia angular de cruce de fase, cons, donde se alcanza la fase <|>t- en la fase de la respuesta tpy(to)* de la conexión en serie del sistema controlado y el equipo de medición; a esta frecuencia la fase de la respuesta tp(oj) del circuito abierto de control final determinado pasa a través de la línea de -180°.
- Determinar la ubicación de los puntos de quiebre cuando se aplican las razones arriba mencionadas al valor de la frecuencia angular de cruce de fase determinada en el diagrama.
- Determinar la pendiente mF de la amplitud de la respuesta inversa rR(co)-1*del elemento de control cerca de la frecuencia angular de cruce de fase ton8. Se traza una sección asintótica con esta pendiente, a través del punto del valor de amplitud de la respuesta de Fy(á>)*del sistema controlado y el equipo de medición en la frecuencia angular de cruce de fase IÜ^.
- La amplitud inversa de la respuesta TRÍO))-1 del elemento de control se gráfica y se evalúa en la distancia cirje (arriba de esta sección asintótica) de la misma forma que se hizo antes para obtener el margen de fase.
- En el caso de un elemento de control (PID)-"!"-,, se sigue el mismo método que en ©.
Nota: Se recomienda, además, determinar la frecuencia angular de cruce de ganancia o>o8. Esa frecuencia está en el punto de intersección de Fyfco)* de la conexión en serie del sistema controlado y el equipo de medición, y la amplitud inversa de la respuesta FRE(OJ)-1* del elemento de control.
Elección de uno de los dos elementos de control que se determinaron No sólo la obtención de la condición de margen de fase, sino también la del margen de ganancia, conduce a la determinación de un elemento de control. Se escoge el elemento con el menor coeficiente de acción proporcional - o integral. Salvo algunas raras excepciones, con esta elección el elemento de control también cumple el otro requisito de la determinación.
Comparación entre elementos de control determinados por medio de la elección de distintas razones
Con la elección de distintas razones se obtiene el mejor comportamiento del elemento de control determinado para el elemento con el valor máximo de la frecuencia angular de cruce de ganancia ioD. Esta frecuencia angular - determinada para el circuito abierto de control - es una cantidad que indica la rapidez con la que se llega al valor final en el circuito cerrado de control.
* Ver la explicación de los subíndices R y y en la nota al pie de la página U'28.
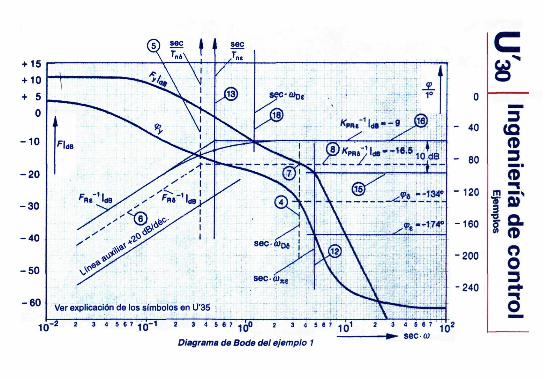
Diagrama de Bode del ejemplo 1 seco)
0
- 40
- 80
- 120
-160
-200
-240
2
c M B M
3 <Q <D 3 (D ^ m ■—> f»
* & 8 CD O O 3 !•+ ^ O
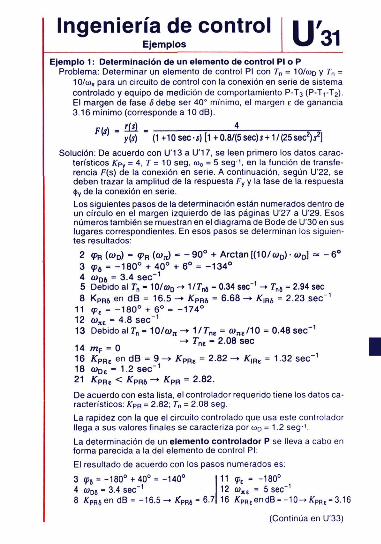
Ingeniería de control Ejemplos U'31
Ejemplo 1: Determinación de un elemento de control Pl o P Problema: Determinar un elemento de control Pl con T„ = 10/u>D y T„ =
10/a), para un circuito de control con la conexión en serie de sistema controlado y equipo de medición de comportamiento P-T3 (P-T,-T2). El margen de fase 5 debe ser 40° mínimo, el margen E de ganancia 3.16 mínimo (corresponde a 10 dB).
-.. _ r[si _ 4 " y(s) " (1 +10 sec-í) [1 + 0.8 / (5sec) j+1/ (25secV]
Solución: De acuerdo con U'13 a U'17, se leen primero los datos característicos KPy = 4, T= 10 seg, u>0 = 5 s e g ' , en la función de transferencia F(s) de la conexión en serie. A continuación, según U'22, se deben trazar la amplitud de la respuesta Fy y la fase de la respuesta <t>y de la conexión en serie. Los siguientes pasos de la determinación están numerados dentro de un círculo en el margen izquierdo de las páginas U'27 a U'29. Esos números también se muestran en el diagrama de Bode de U'30 en sus lugares correspondientes. En esos pasos se determinan los siguientes resultados:
2 <PR (<ÜD) = q>p¡ ( « „ ) = - 90 ° + Arctan [(10/ w0) ■ a>0] = - 6 ° 3 <p6 = - 1 8 0 ° + 40° + 6° = - 1 3 4 ° 4 cuD6 = 3.4 s e c " 1
5 Debido al Tn = 10/<uD-> 1/TnJ = 0.34 sec"' -» T„b = 2.94 sec 8 KPR6 en dB = 16.5 —» K p R 6 = 6.68 -» Kmb = 2.23 sec " 1
11 <pE - - 1 8 0 ° + 6° - - 1 7 4 ° 12 <u„e = 4.8 s e c " ' 13 Debido al 7"„ = 10/<u„ -* MTnc = fiWO = 0.48 sec" 1
-► Tnt = 2.08 sec 14 m F = 0 16 KpR ( . en dB - 9 -» KPRc = 2.82 -> Klfíc = 1.32 sec " 1
18 t u D e = 1.2 s e c - 1
21 KPRE < ^ P H 6 ~> ' 'PR = 2 .82.
De acuerdo con esta lista, el controlador requerido tiene los datos característicos: KPfí = 2.82; r „ = 2.08 seg.
La rapidez con la que el circuito controlado que usa este controlador llega a sus valores finales se caracteriza por tuD = 1.2 s e g ' .
La determinación de un elemento controlador P se lleva a cabo en forma parecida a la del elemento de control Pl:
El resultado de acuerdo con los pasos numerados es:
3 fl>4 - -180° + 40° - -140° 11 q>t - -180° 4 (oDi - 3.4 sec"1 12 m%t - 5 sec"1
8 KP R Sen dB = -16.5 — tfPRj = 6.7 16 KPREendB = - 1 0 - A T P R E - 3 . 1 6
(Continúa en U'33)
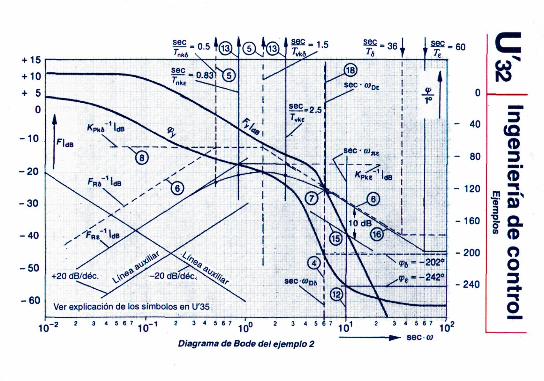
%\Mte](sxj&j 522 - 1 . 5 sec 60
0
- 40
- 80
- 120
- 1 6 0
- 2 0 0
- 2 4 0
i
c *f
^^ 3
<D 3 § ■ ■ ■
<D - t
m "■> | fi> ZQ. • o
O O 3 ^ O ^ ~
Diagrama de Bode del ejemplo 2 * - seca)
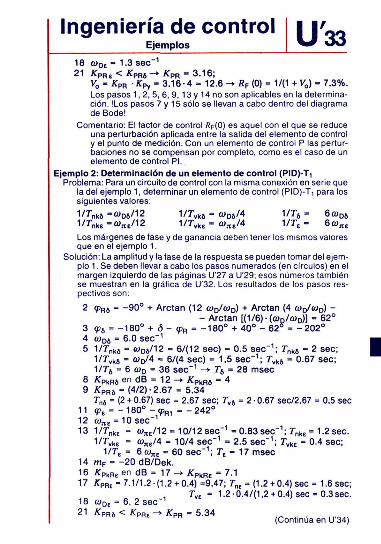
Ingeniería de control Ejemplos U'33
18 <oDt - 1.3 sec 21 KpRe < ^PRS ""* ^ P R " 3.16;
V 0 - K P R - K p , - 3 . 1 6 - 4 - 12.6 -» RF (0) - 1/(1 + V0) - 7.3%. Los pasos 1,2, 5, 6, 9,13 y 14 no son aplicables en la determinación. !Los pasos 7 y 15 sólo se llevan a cabo dentro del diagrama de Bode!
Comentario: El factor de control RF(0) es aquel con el que se reduce una perturbación aplicada entre la salida del elemento de control y el punto de medición. Con un elemento de control P las perturbaciones no se compensan por completo, como es el caso de un elemento de control Pl.
Ejemplo 2: Determinación de un elemento de control (PID)-Ti Problema: Para un circuito de control con la misma conexión en serie que
la del ejemplo 1, determinar un elemento de control (PID)-T, para los siguientes valores: 1/7"„k5 - ü W 1 2 1/rvk6 - Q>06/4 MTh - 6£UDó 1/Tn k t -a>«/12 1/Tvke - <une/4 1/Te - 6<une
Los márgenes de fase y de ganancia aeben tener los mismos valores que en el ejemplo 1.
Solución: La amplitud y la fase de la respuesta se pueden tomar del ejemplo 1. Se deben llevar a cabo los pasos numerados (en círculos) en el margen Izquierdo de las páginas U'27 a U'29; esos números también se muestran en la gráfica de U'32. Los resultados de los pasos respectivos son: 2 ippj - -90° + Arctan (12 wD/co0) + Arctan (4 (OD/ÚIQ) -
- Arctan [ (1 /6) - (<UP / ÍUD ) ] = 62° 3 <p6 - -180° + 6- (pr, - -180° + 4 0 ° - 6 2 * - - 202° 4 a)D6 - 6.0 sec"1
5 1/7"nkó - « W 1 2 - 6/(12 sec) - 0.5 sec"1; Tnk6 = 2 sec; 1/ rvkó " " ' c / 4 - 6/(4 sec) - 1,5 sec"1; Tvk6 - 0.67 sec; 1/r6 - 6 <o0 - 36 sec"1 -» T6 - 28 msec
8 /¡:PkR5endB = 1 2 - / i : p k R 6 - 4 9 KpR6 - (4/2)-2.67 - 5.34
rn6 - (2 + 0.67) sec = 2.67 sec; 7"v6 - 2 • 0.67 sec/2.67 = 0.5 sec 11 <pe - - 180° - <PR, - - 2 4 2 ° 12 a)„ t - 10 sec"1
13 1/rnke - ü)ne /12-10/12 sec" 1 -0 .83 sec"1; rnke = 1.2 sec. 1/rvke - <une/4 - 10/4 sec"1 - 2.5 sec"1; 7"vkE - 0.4 sec;
MTt - 6 m^ = 60 sec"1; Tc - 17 msec 14 mF = -20dB/Dek. 16 ATPkREen dB - 17 -+ ATpkRe - 7.1 17 KPRe = 7.1/1.2-(1.2+ 0.4) =9.47; Tm - (1.2+ 0.4) sec = 1.6 sec;
7"v, - 1.2-0.4/(1.2+ 0.4) sec-0.3 sec. 18 cuDe = 6. 2 sec"1
2 1 *PR6 < KpRe - * KPR = 5.34 (Continua en U 34)
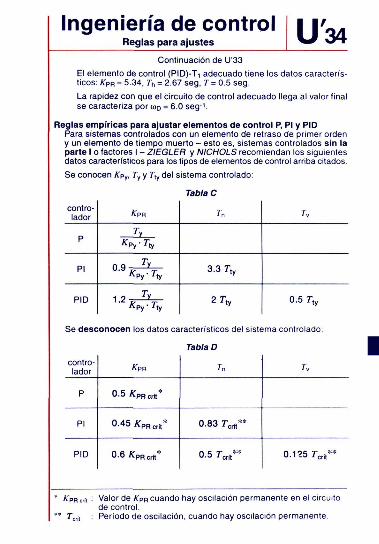
Ingeniería de control Reglas para ajustes
Continuación de U'33
El elemento de control (PID)-Ti adecuado tiene los datos característicos: Kpfí = 5.34, Th = 2.67 seg, T = 0.5 seg.
La rapidez con que et circuito de control adecuado llega al valor final se caracteriza por cop = 6.0 seg-1.
Reglas empíricas para ajusfar elementos de control P, Pl y PID Para sistemas controlados con un elemento de retraso de primer orden y un elemento de tiempo muerto - esto es, sistemas controlados sin la parte I o factores I - ZIEGLER y NICHOLS recomiendan los siguientes datos característicos para los tipos de elementos de control arriba citados.
Se conocen A>y, Ty y 7"ty del sistema controlado:
Tabla C
consolador
P
Pl
PID
KpR
Ty KPy - Tty
n n T1
i 2 rr KPy ■ Tfy
T„
3.3 r,y
2T,v
7",
0.5 r ty
Se desconocen los datos característicos del sistema controlado:
Tabla D
consolador
P
Pl
PID
KpR
0.5 Kpft c r ¡ ,
0 . 4 5 KPPi0rit*
0 . 6 / C P R c r „ *
7n
0.83 T c r í t * *
0.5 rcrí t**
7"v
0.125 T e , * *
U'34
* KpRcrít : Valor de KPn cuando hay oscilación permanente en el circuito de control.
" rcrri : Período de oscilación, cuando hay oscilación permanente.
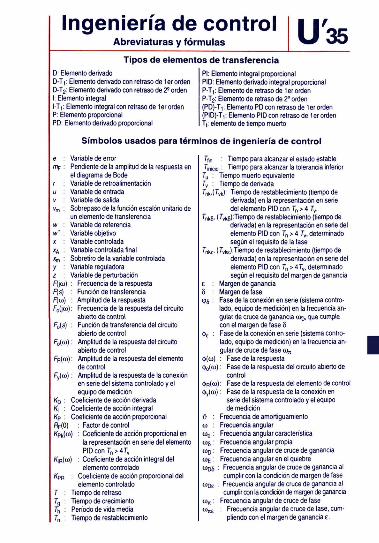
1 ngeniería de control Abreviaturas y fórmulas U'35
Tipos de elementos de transferencia D: Elemento derivado D-T D-T
: Elemento derivado con retraso de 1er orden : Elemento derivado con retraso de 25 orden
1: Elemento integral l-T, Elemento integral con retraso de 1 er orden P: Elemento proporcional PD:
e mf
r u V
^m
W w' X
*A *m
y Z
fíjo. F(s) F(t„ F„!]
F„(s
F„(<
Fp(
F,(.
*D
«; KP
RF( Kpk
K¡p
Kpp
r
Mi
r«
Elemento derivado proporcional
Pl: Elemento integral proporcional PID: Elemento derivado integral proporcional P-T]: Elemento de retraso de 1 er orden P-T2: Elemento de retraso de 2- orden (PDJ-Tv Elemento PD con retraso de 1er orden (PIDJ-T]: Elemento PID con retraso de 1er orden Tt: elemento de tiempo muerto
Símbolos usados para términos de ingeniería de control
Variable de error Pendiente de la amplitud de la respuesta en el diagrama de Bode Variable de retroalimentación Variable de entrada Variable de salida Sobrepaso de Ea (unción escalón unitario de un elemento de transferencia Variable de referencia Variable objetivo Variable controlada Variable controlada final Sobretiro de la variable controlada Variable reguladora Variable de perturbación
} : Frecuencia de la respuesta : Función de transferencia : Amplitud de la respuesta
o): Frecuencia de la respuesta del circuito abierto de control
) : Función de transferencia del circuito abierto de control
j ) : Amplitud de la respuesta del circuito abierto de control
o): Amplitud de la respuesta del elemento de control
j ) : Amplitud de la respuesta de la conexión en serie del sistema controlado y el equipo de medición
Coeficiente de acción derivada Coeficiente de acción integral Coeficiente de acción proporcional
)) : Factor de control u) : Coeficiente de acción proporcional en
la representación en serie del elemento PIDconTn>4rv
(o) : Coeficiente de acción integral del elemento controlado
: Coeficiente de acción proporcional del elemento controlado
Tiempo de retraso Tiempo de crecimiento Período de vida media Tiempo de restablecimiento
X[in : Tiempo para alcanzar el estado estable finteo : Tiempo para alcanzar ¡a tolerancia inferior Tu : Tiempo muerto equivalente Tv : Tiempo de derivada í"nk.( vk): Tiempo de restablecimiento (tiempo de
derivada) en la representación en serie del elemento PID con Tn > 4 T"v.
TnkS. (7vtó):Tiempo de restablecimiento (tiempo de derivada) en la representación en serie del elemento PID con 7"n > 4 Tv, determinado según el requisito de la fase
W . (T^JiTiempo de restablecimiento {tiempo de derivada) en la representación en serie del elemento PID con 7n > 4 Tv, determinado según el requisito del margen de ganancia
£ 8 <P6
Margen de ganancia Margen de fase Fase de la conexión en serie (sistema contro-lado, equipo de medición) en la frecuencia angular de cruce de ganancia U>Q, que cumple con el margen de fase 5
$£ : Fase de la conexión en serie {sistema controlado. equipo de medición) en la frecuencia angular de cruce de fase con
<t>(to) : Fase de la respuesta <t>0(to): Fase de la respuesta del circuito abierto de
control <t)R(ío}: Fase de la respuesta del elemento de control 0¥(o)): Fase de la respuesta de la conexión en
serie del sistema controlado y el equipo de medición
ü (i)
(Oo 0 ) 8
oin u E
Frecuencia de amortiguamiento Frecuencia angular Frecuencia angular característica Frecuencia angular propia Frecuencia angular de cruce de ganancia Frecuencia angular en el quiebre
CÚD5 : Frecuencia angular de cruce de ganancia al cumplir con la condición de margen de lase
conE - Frecuencia angular de cruce de ganancia al cumplir con la condición de margen de ganancia
ojn : Frecuencia angular de cruce de fase o)nE : Frecuencia angular de cruce de fase, cum-
phendo con el margen de ganancia E.
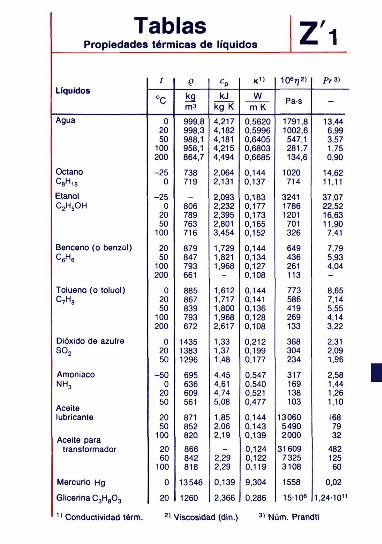
Tablas Propiedades
Líquidos
Agua
Octano ^ 8 ^ 1 8
Etanol C2H5OH
Benceno (o benzol) C 6 H 6
Tolueno (o toluol) C7H8
Dióxido de azufre S0 2
Amoniaco NH3
Aceite lubricante
Aceite para transformador
Mercurio Hg
Glicerina C3H803
1 ' Conductividad térm.
térmicas de líquidos
í
°c 0
20 50
100 200
-25 0
-25 0
20 50
100
20 50
100 200
0 20 50
100 200
0 20 50
-50 0
20 50
20 50
100
20 60
100
0
20
2)
Q ka ma
999,8 998,3 988,1 958,1 864,7
738 719
_ 806 789 763 716
879 847 793 661
885 867 839 793 672
1435 1383 1296
695 636 609 561
871 852 820
866 842 818
13546
1260
Viscosida
CP
k j kg K
4,217 4,182 4,181 4,215 4,494
2.064 2,131
2,093 2,232 2,395 2,801 3,454
1,729 1,821 1,968
-1,612 1,717 1,800 1,968 2,617
1,33 1,37 1,48
4,45 4,61 4,74 5,08
1,85 2,06 2,19
-2,29 2,29
0,139
2,366
d (din.)
K'>
W m K
0,5620 0,5996 0.6405 0,6803 0.6685
0,144 0,137
0,183 0,177 0,173 0,165 0,152
0,144 0,134 0,127 0,108
0,144 0,141 0,136 0,128 0,108
0,212 0,199 0,177
0,547 0,540 0.521 0,477
0,144 0,143 0,139
0,124 0,122 0,119
9,304
0,286
3 ) N
7 £.
106r/2)
Pas
1791,8 1002,6 547,1 281,7 134,6
1020 714
3241 1786 1201 701 326
649 436 261 113
773 586 419 269 133
368 304 234
317 169 138 103
13060 5490 2000
31609 7325 3108
1558
15-106
úm. Pran
:'i prV
13,44 6,99 3,57 1,75 0,90
14,62 11,11
37,07 22,52 16,63 11,90 7,41
7,79 5,93 4,04 -8,65 7,14 5,55 4,14 3,22
2,31 2,09 1,96
2,58 1,44 1.26 1,10
168 79 32
482 125 60
0,02
1,24-10"
Jtl
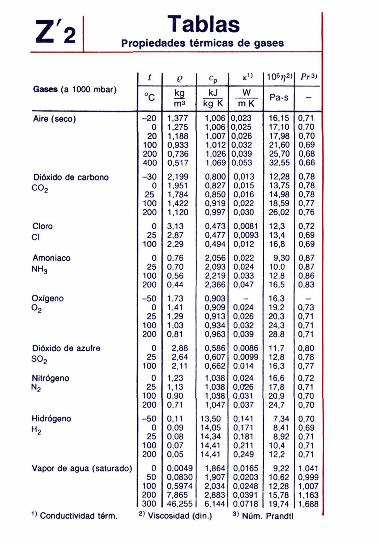
Z2 Tablas Propiedades térmicas de gases
Gases (a 1000 mbar)
Aire (seco)
Dióxido de carbono C 0 2
Cloro Cl
Amoniaco NH3
Oxígeno 0 2
Dióxido de azufre S 0 2
Nitrógeno N2
Hidrógeno H2
Vapor de agua (saturado)
" Conductividad térm.
t
°c -20
0 20
100 200 400
-30 0
25 100 200
0 25
100
0 25
100 200
-50 0
25 100 200
0 25
100 0
25 100 200
-50 0
25 100 200
0 50
100 200 300
2> Vise
e kg m3
1,377 1,275 1,188 0,933 0,736 0,517
2,199 1,951 1,784 1,422 1,120
3,13 2,87 2,29
0,76 0,70 0,56 0,44
1,73 1,41 1,29 1,03 0,81
2,88 2,64 2,11
1,23 1,13 0,90 0,71
0,11 0,09 0,08 0,07 0,05
0,0049 0,0830 0,5974 7,865 46,255
osidad (
CP k j
kg K
1.006 1.006 1,007 1,012 1,026 1,069
0,800 0,827 0.850 0.919 0,997
0,473 0.477 0,494
2,056 2,093 2,219 2,366
0.903 0.909 0,913 0,934 0,963
0,586 0,607 0,662 1,038 1,038 1,038 1,047
13,50 14,05 14,34 14,41 14,41
1,864 1,907 2,034 2,883 6.144
din.)
x')
W m K
0,023 0,025 0,026 0,032 0,039 0,053
0,013 0,015 0,016 0.022 0,030
0,0081 0,0093 0,012
0,022 0,024 0.033 0,047
-0,024 0,026 0,032 0,039
0,0086 0,0099 0,014 0,024 0,026 0,031 0,037
0,141 0,171 0.181 0,211 0.249
0,0165 0,0203 0.0248 0.0391 0.0718 3> Núm.
106í)2>
Pa-s
16,15 17,10 17,98 21,60 25,70 32.55
12,28 13,75 14,98 18,59 26,02
12,3 13,4 16,8
9,30 10,0 12,8 16,5
16,3 19,2 20,3 24,3 28,8
11.7 12,8 16,3 16,6 17,8 20,9 24,7
7,34 8,41 8,92
10,4 12,2
9,22 10,62 12,28 15,78 19,74
Prandtl
/V3)
-0,71 0,70 0,70 0,69 0,68 0,66
0,78 0,78 0,78 0,77 0,76
0,72 0,69 0,69
0,87 0,87 0,86 0.83
-0,73 0,71 0,71 0,71
0,80 0,78 0,77 0.72 0,71 0,70 0,70
0,70 0.69 0,71 0,71 0,71
1,041 0,999 1,007 1,163 1,688
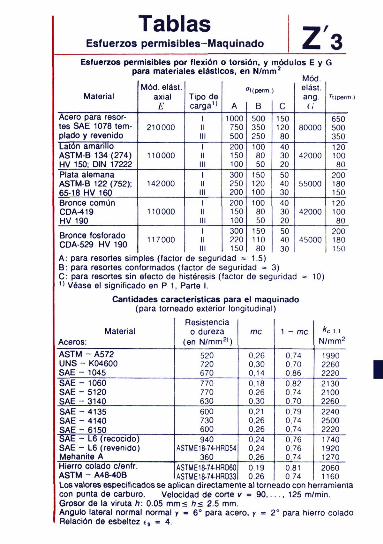
Tablas Esfuerzos permisibles Maquinado Z'3
Esfuerzos permisibles por flexión o torsión, y módulos E y i para materiales elásticos, en N/mm2
Material
Acero para resortes SAE 1078 templado y revenido Latón amarillo ASTM-B 134(274) HV 150; DIN 17222 Plata alemana ASTM-B 122 (752); 65-18 HV 160 Bronce común CDA-419 HV 190
Bronce fosforado CDA-529 HV 190
Mód. elást. axial
E
210000
110000
142000
110000
117000
Tipo de carga1 '
1 II III 1 II III 1 II III 1 II III 1 II III
A 1000 750 500 200 150 100 300 250 200 200 150 100 300 220 150
7l(perm.)
B C 500 350 250 100 80 50
150 120 100 100 80 50
150 110 80
150 120 80 40 30 20 50 40 30 40 30 20 50 40 30
Mód. elást. ang.
80000
42000
55000
42000
45000
Tt(perm.)
650 500 350 120 100 80
200 180 150 120 100 80
200 180 150
A: para resortes simples (factor de seguridad » 1.5) B: para resortes conformados (factor de seguridad • 3) C: para resortes sin efecto de histéresis (factor de seguridad < " Véase el significado en P 1, Parte I.
Cantidades características para el maquinado (para torneado exterior longitudinal)
10)
Material Aceros:
Resistencia o dureza
(en N/mm21) N/mm2
ASTM - A572 UNS - K04600 SAE - 1045
5?0 720 670
0 26 0.30 0,14
1990 2260 2220
SAE - 1060 SAE - 5120 SAE - 3140
770 770 630
0 18 0 26 0.30
2130 2100 2260
SAE - 4135 SAE - 4140 SAE - 6150 SAE - L6 (recocido) SAE - L6 (revenido) Mehanite A
600 730 600
0.21 0.26 0 26
2240 2500 2220
940 ASTME18-74-HRD54
360
0 24 0.24 0.26
1740 1920 1270
Hierro colado c/enfr. ASTME18-74-HRD60 ASTM - A48-40B ASTME18-74-HRD33 Los valores especificados se aplican directamente con punta de carburo. Velocidad de corte v ■■ Grosor de la viruta h: 0.05 mm< h< 2.5 mm. Ángulo lateral normal normal y - 6° para acero Relación de esbeltez c, = 4.
0.19 0 0.26 0 al torneado = 90 1
1 2060 74 1160 con herramienta 25 m/min.
2° para hierro colado
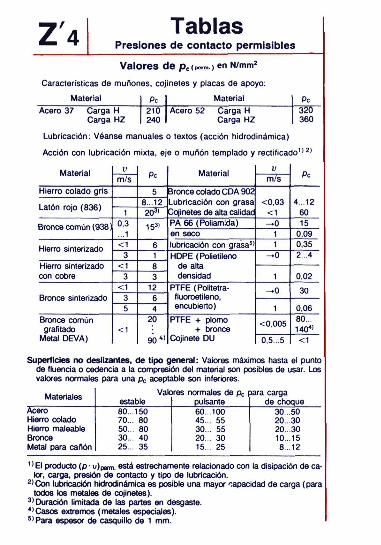
Z4 Tablas Presiones de contacto permisibles Valores de pc(r»m,.) en N/mm2
Características de muñones, cojinetes y placas de apoyo:
Material pc I Material Pe "3S¡r 360
Acero 37 Carga H Carga HZ
210 I Acero 52 240 I
Carga H Carga HZ
Lubricación: Véanse manuales o textos (acción hidrodinámica)
Acción con lubricación mixta, eje o muñón templado y rect i f icado"2 '
Material
Hierro colado gris
Latón rojo (836)
Bronce común (938 i
Hierro sinterizado con cobre
Bronce sinterizado
Bronce común grafitado
Metal DEVA)
V m/s
1 0,3 ...1 <1
3 <1
3 <1
3 5
<1
Pc
5 8..12 203)
1S3'
6 1 8 3
12 6 4
20
90*»
Material
Bronce colado CDA 902 Lubricación con grasa Cojinetes de alta calidad PA 66 (Poliamida) en seco lubricación con grasa51
HDPE (Polietileno de alta densidad
PTFE (Politetra-fluoroetileno, encubierto)
PTFE + plomo + bronce
Cojinete DU
V m/s
<0.03 <1 - . 0
1 1
- . 0
1
- . 0
1
<0.005
0,5..5
Pc
4...12 60 15
0,09 0,35 2...4
0,02
30
0,06 80 14041
<1
Superficies no deslizantes, de tipo general: Valores máximos hasta el punto de fluencia o cedencia a la compresión del material son posibles de usar. Los valores normales para una pc aceptable son inferiores.
Materiales
Acero Hierro colado Hierro maleable Bronce Metal para cañón
estable Valores normales de pc para carga
pulsante de choque 80 70.. 50. 30.. 25..
150 80 80 40 35
60.100 45... 55 30... 55 20.. 30 15 25
30 .50 20..30 20 .30 10.15 8...12
1 ' El producto (p - u) ce,m está estrechamente relacionado con la disipación de ca lor, carga, presión de contacto y tipo de lubricación.
21 Con lubricación hidrodinámica es posible una mayor capacidad de carga (para todos los metales de cojinetes).
31 Duración limitada de las panes en desgaste. "Casos extremos (metales especiales). s> Para espesor de casquillo de 1 mm.
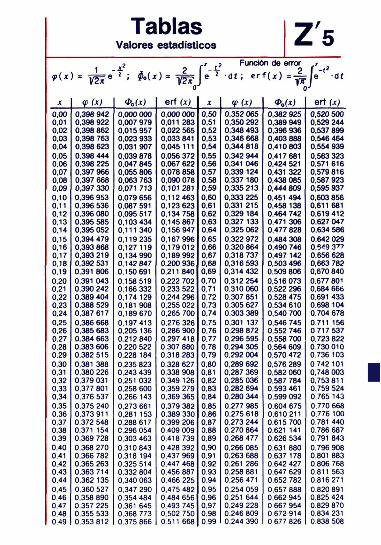
Tablas Valores estadísticos
i --
X
0,00 0.01 0,02 0.03 0,04 0,05 0,06 0,07 0,08 0,09 0,10 0,11 0.12 0,13 0.14 0.15 0.16 0,17 0.18 0.19 0.20 0,21 0.22 0.23 0,24 0,25 0,26 0.27 0.28 0.29 0,30 0,31 0,32 0,33 0,34 0,35 0,36 0,37 0,38 0.39 0.40 0,41 0.42 0.43 0.44 0,45 0.46 0,47 0.48 0.49
<f(x) 0.398 942 0.398 922 0.398 862 0,398 763 0,398 623 0,398 444 0.398 225 0.397 966 0.397 668 0,397 330 0.396 953 0,396 536 0.396 080 0.395 585 0,395 052 0,394 479 0.393 868 0,393 219 0,392 531 0.391 806 0,391 043 0,390 242 0.389 404 0.388 529 0.387 617 0.386 668 0.385 683 0,384 663 0,383 606 0,382 515 0,381 386 0,380 226 0.379 031 0.377 801 0.376 537 0,375 240 0,373 911 0.372 548 0.371 154 0,369 728 0.368 270 0.366 782 0,365 263 0.363 714 0.362 135 0.360 527 0.358 890 0.357 225 0.355 533 0.353 812
<P„M 0,000 000 0,007 979 0,015 957 0,023 933 0,031 907 0,039 878 0,047 845 0.055 806 0,063 763 0.071 713 0,079 656 0.087 591 0,095 517 0,103 434 0,111 340 0.119 235 0,127 119 0,134 990 0,142 847 0.150 691 0,158 519 0,166 332 0.174 129 0.181 908 0,189 670 0,197 413 0,205 136 0.212 840 0.220 522 0.228 184 0.235 823 0.243 439 0,251 032 0,258 600 0.266 143 0,273 661 0,281 153 0,288 617 C.296 054 0.303 463 0.310 643 0.318 194 0.325 514 0.332 804 0.340 063 0.347 290 0.354 484 0.361 645 0.368 773 0.375 866
■J rc «L 9
jr 2 Función de error r« )= w J e " T d t ; er
erf (x) 0,000 000 0.011 283 0,022 565 0,033 841 0,045 111 0,056 372 0,067 622 0.078 858 0,090 078 0,101 281 0,112 463 0,123 623 0,134 758 0,145 867 0,156 947 0,167 996 0,179 012 0,169 992 0,200 936 0,211 840 0.222 702 0,233 522 0,244 296 0,255 022 0.265 700 0.276 326 0.286 900 0.297 418 0.307 880 0.318 283 0.328 627 0.338 908 0,349 126 0.359 279 0.369 365 0.379 382 0.389 330 0.399 206 0.409 009 0.418 739 0.428 392 0.437 969 0.447 468 0,456 887 0.466 225 0.475 482 0.484 656 0.493 745 0.502 750 0.511 668
JE
0,50 0,51 0,52 0,53 0,54 0,55 0.56 0.57 0.58 0.59 0,60 0.61 0.62 0.63 0.64 0.65 0,66 0.67 0.68 0.69 0.70 0,71 0,72 0,73 0.74 0.75 0.76 0,77 0,78 0.79 0.60 0.81 0.82 0.83 0.84 0.85 0.86 0.87 0.88 0.89 0.90 0.91 0.92 0.93 0.94 0,95 0.96 0,97 0.98 0.99
í W 0.352 065 0.350 292 0.348 493 0,346 668 0.344 818 0,342 944 0,341 046 0,339 124 0,337 180 0.335 213 0.333 225 0,331 215 0.329 184 0.327 133 0,325 062 0,322 972 0.320 864 0,318 737 0,316 593 0,314 432 0,312 254 0,310 060 0,307 851 0.305 627 0.303 389 0,301 137 0,298 872 0.296 595 0.294 305 0,292 004 0.289 692 0.287 369 0.285 036 0,282 694 0.280 344 0.277 985 0,275 618 0,273 244 0.270 864 0,268 477 0,266 085 0,263 688 0.261 286 0,258 881 0,256 471 0.254 059 0.251 644 0.249 228 0,246 809 0.244 390
f(x) = ^ l e - •„
* .W 0.362 925 0,389 949 0,3% 936 0,403 886 0,410 803 0,417 681 0,424 521 0,431 322 0,438 085 0.444 809 0.451 494 0,458138 0.464 742 0.471 306 0,477 828 0,484 308 0,490 746 0,497 142 0.503 496 0,509 806 0,516 073 0,522 2% 0,528 475 0,534 610 0,540 700 0.546 745 0.552 746 0.558 700 0.564 609 0,570 472 0.576 289 0,582 060 0,587 784 0,593 461 0,599 092 0,604 675 0,610 211 0.615 700 0.621 141 0,626 534 0,631 880 0,637 178 0.642 427 0.647 629 0.652 782 0.657 888 0.662 945 0.667 954 0,672 914 0 677 826
er tW 0,520 500 0.529 244 0,537 899 0.546 464 0,554 939 0,563 323 0,571 616 0,579 816 0,587 923 0,595 937 0.603 856 0,611 681 0.619 412 0,627 047 0.634 586 0.642 029 0,549 377 0,666 628 0,663 782 0.670 840 0.677 801 0.684 666 0.691 433 0.698 104 0,704 678 0.711 156 0 717 537 0.723 822 0 730 010 0 736103 0 742 101 0.748 003 0,753 811 0,759 524 0.765 143 0,770 668 0,776 100 0.781 440 0.786 687 0,791 843 0.796 908 0.801 883 0.806 768 0.811 563 0.816 271 0,820 891 0.825 424 0.829 870 0,834 231 0.838 508
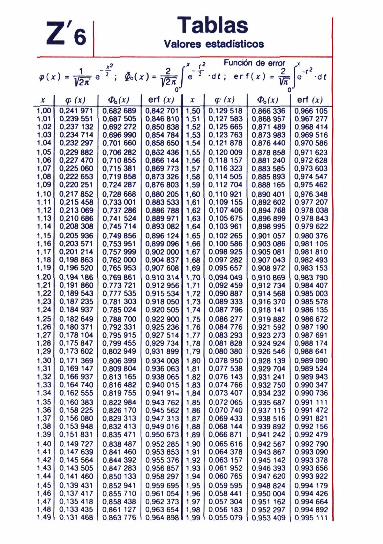
- 7'* ¿- o
,2
Tablas Valores estadísticos
, ,2 Función de error «
*,(x)*we~' ■ Ux)^wr T 'dí ; er i r *
1,00 1,01 1,02 1,03 1,04 1.05 1,06 1,07 1,08 1,09 1,10 1,11 1,12 1,13 1,14 1,15 1,16 1,17 1,18 1,19 1,20 1,21 1,22 1,23 1,24 1,25 1,26 1,27 1,28 1,29 1,30 1,31 1,32 1,33 1,34 1.35 1,36 1,37 1,38 1,39 1,40 1.41 1.42 1.43 1.44 1.45 1.46 1.47 1.48 1 49
í W 0,241 971 0,239 551 0,237 132 0,234 714 0,232 297 0,229 882 0,227 470 0.225 060 0.222 653 0,220 251 0.217 852 0.215 458 0.213 069 0.210 686 0.208 308 0,205 936 0,203 571 0.201 214 0.198 863 0,196 520 0,194 186 0.191 860 0,189 543 0,187 235 0,184 937 0,182 649 0.180 371 0.178 104 0.175 847 0,173 602 0,171 369 0.169 147 0,166 937 0.164 740 0,162 555 0.160 383 0,158 225 0,156 080 0,153 948 0,151 831 0.149 727 0.147 639 0,145 564 0.143 505 0,141 460 0,139 431 0.137 417 0,135 418 0,133 435 0.131 468
<Po(x) 0,682 689 0,687 505 0,692 272 0.696 990 0,701 660 0,706 282 0,710 855 0,715 381 0,719 858 0.724 287 0,728 668 0.733 001 0,737 286 0.741 524 0.745 714 0,749 856 0,753 951 0,757 999 0.762 000 0,765 953 0.769 861 0.773 721 0,777 535 0,781 303 0,785 024 0,788 700 0,792 331 0,795 915 0,799 455 0,802 949 0,806 399 0.809 804 0,813 165 0,816 482 0,819 755 0,822 984 0,826 170 0.829 313 0.832 413 0,835 471 0,838 487 0,841 460 0.844 392 0.847 283 0,850 133 0.852 941 0.855 710 0,858 438 0,861 127 0,863 776
er f (x) 0,842 701 0,846 810 0,850 838 0.854 784 0.858 650 0,852 436 0,866 144 0,869 773 0,873 326 0,876 803 0,880 205 0,883 533 0,886 788 0,889 971 0,893 082 0,896 124 0.899 096 0.902 000 0,904 837 0,907 608 0.910 314 0,912 956 0,915 534 0,918 050 0,920 505 0.922 900 0.925 236 0.927 514 0,929 734 0,931 899 0,934 008 0,936 063 0.938 065 0.940 015 0,941 9 1 -0.943 762 0,945 562 0,947 313 0,949 016 0.950 673 0.952 285 0,953 853 0.955 376 0,956 857 0.958 297 0,959 695 0,961 054 0,962 373 0.963 654 0.964 898
X 1,50 1,51 1.52 1.53 1.54 1,55 1,56 1.57 1.58 1.59 1,60 1,61 1,62 1,63 1.64 1.65 1.66 1.67 1.68 1,69 1.70 1,71 1.72 1.73 1.74 1.75 1.76 1.77 1,78 1.79 1,80 1.81 1.82 1.83 1,84 1.85 1,86 1.87 1,88 1,89 1,90 1.91 1.92 1.93 1.94 1.95 1.96 1.97 1.98 1,99
<P(x) 0,129 518 0,127 583 0,125 665 0,123 763 0,121 878 0,120 009 0,118 157 0,116 323 0,114 505 0.112 704 0,110 921 0,109 155 0,107 406 0.105 675 0,103 961 0,102 265 0.100 586 0,098 925 0,097 282 0,095 657 0,094 049 0,092 459 0,090 887 0,089 333 0.087 796 0,086 277 0,084 776 0.083 293 0.081 828 0,080 380 0,078 950 0.077 538 0.076 143 0.074 766 0,073 407 0.072 065 0.070 740 0.069 433 0,068 144 0,066 871 0,065 616 0,064 378 0,063 157 0.061 952 0.060 765 0,059 595 0,058 441 0.057 304 0,056 1B3 0,055 079
r(*>. £].■*•di 0
* o W 0.866 336 0,868 957 0,871 489 0,873 983 0,876 440 0,878 858 0,881 240 0.883 585 0,885 893 0,888 165 0,890 401 0,892 602 0.894 768 0 . 8 % 899 0,898 995 0,901 057 0,903 086 0,905 081 0,907 043 0,908 972 0,910 869 0,912 734 0,914 568 0.916 370 0,918 141 0.919 882 0,921 592 0,923 273 0,924 924 0.926 546 0,928 139 0,929 704 0.931 241 0.932 750 0,934 232 0,935 687 0,937 115 0.938 516 0.939 892 0,941 242 0,942 567 0,943 867 0,945 142 0,946 393 0,947 620 0,948 824 0,950 004 0,951 162 0.952 297 0.953 409
erf (x) 0,966 105 0.967 277 0,968 414 0.969 516 0,970 586 0,971 623 0.972 628 0.973 603 0,974 547 0,975 462 0.976 348 0.977 207 0.978 038 0.978 843 0.979 622 0.980 376 0.981 105 0,981 810 0.982 493 0,983 153 0.983 790 0,984 407 0,985 003 0.985 578 0.986 135 0,986 672 0.987 190 0.987 691 0.988 174 0,988 641 0,989 090 0.989 524 0,989 943 0.990 347 0.990 736 0,991 111 0.991 472 0,991 821 0.992 156 0.992 479 0,992 790 0,993 090 0.993 378 0.993 656 0,993 922 0.994 179 0.994 426 0,994 664 0.994 892 0,995 111
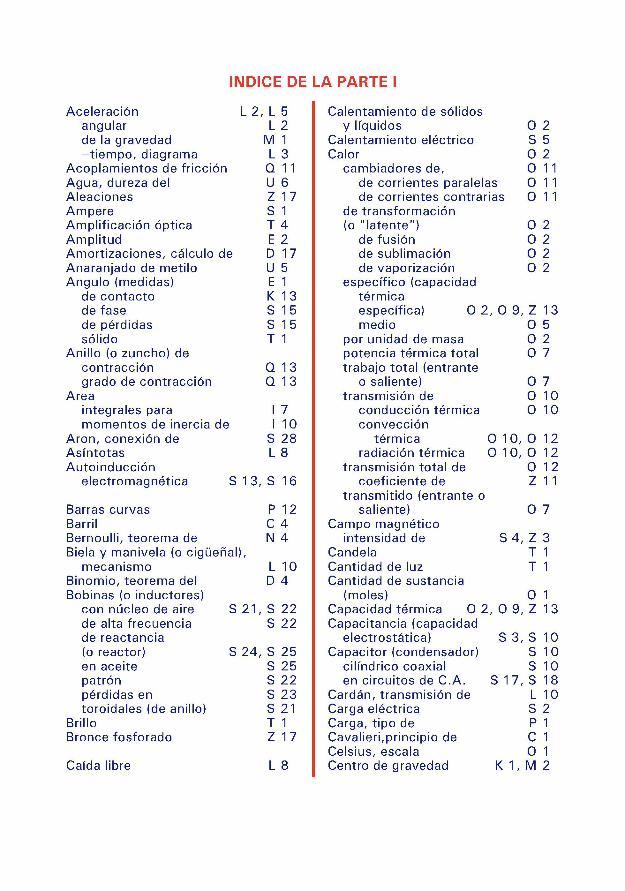
ÍNDICE DE LA PARTE I
Aceleración L 2 angular de la gravedad - t iempo, diagrama
Acoplamientos de fricción Agua, dureza del Aleaciones Ampere Amplif icación óptica Ampli tud Amortizaciones, cálculo de Anaranjado de metilo Ángulo (medidas)
de contacto de fase de pérdidas sólido
Anillo (o zuncho) de contracción grado de contracción
Área integrales para momentos de inercia de
Aron, conexión de Asíntotas Autoinducción
, L 5 L 2
M 1 L 3
Q 11 U 6 Z 17 S 1 T 4 E 2 D 17 U 5 E 1 K 13 S 15 S 15 T 1
Q 13 Q 13
I 7 I 10
S 28 L 8
electromagnética S 1 3, S 16
Barras curvas Barril Bernoulli, teorema de Biela y manivela (o cigüeñal),
mecanismo Binomio, teorema del Bobinas (o inductores)
con núcleo de aire S 21 de alta frecuencia de reactancia (o reactor) S 24 en aceite patrón pérdidas en toroidales (de anillo)
Brillo Bronce fosforado
P 12 C 4 N 4
L 10 D 4
S 22 S 22
S 25 S 25 S 22 S 23 S 21 T 1 Z 17
Caída libre L 8
2 5 2
O 11 O 11 O 11
13 5 2 7
Calentamiento de sólidos y líquidos O
Calentamiento eléctrico S Calor O
cambiadores de, de corrientes paralelas de corrientes contrarias
de transformación (o "latente")
de fusión de sublimación de vaporización
específico (capacidad térmica específica) O 2, O 9, medio
por unidad de masa potencia térmica total trabajo total (entrante
o saliente) transmisión de
conducción térmica convección
térmica O 1 0, radiación térmica 0 10,
transmisión total de coeficiente de
transmitido (entrante o saliente)
Campo magnético intensidad de S 4,
Candela Cantidad de luz Cantidad de sustancia
(moles) Capacidad térmica O 2, O 9, Capacitancia (capacidad
electrostática) S 3, Capacitor (condensador)
cilindrico coaxial en circuitos de C.A. S 1 7,
Cardán, transmisión de Carga eléctrica Carga, tipo de Cavalieri,principio de Celsius, escala O 1 Centro de gravedad K 1 , M 2
0 7 0 10 0 10 0 12 0 12 0 12 Z 11 0 7 Z 3 T 1 T 1 0 1 Z 13 10 10 10 18 10 2 1 1
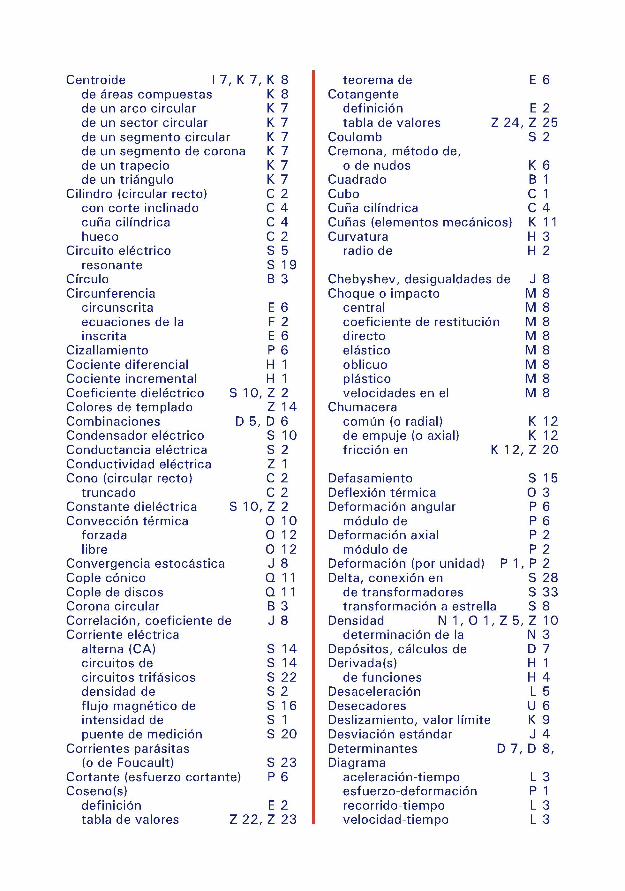
Centroide I 7, K 7, K 8 de áreas compuestas K 8 de un arco circular K 7 de un sector circular K 7 de un segmento circular K 7 de un segmento de corona K 7 de un trapecio K 7 de un triángulo K 7
Cilindro (circular recto) C 2 con corte inclinado C 4 cuña cilindrica C 4 hueco C 2
Circuito eléctrico S 5 resonante S 1 9
Círculo B 3 Circunferencia
circunscrita ecuaciones de la inscrita
Cizallamiento Cociente diferencial Cociente incremental Coeficiente dieléctrico S 1 0, Colores de templado Combinaciones D 5, Condensador eléctrico Conductancia eléctrica Conductividad eléctrica Cono (circular recto)
truncado Constante dieléctrica S 1 0, Convección térmica
forzada libre
Convergencia estocástica Copie cónico Copie de discos Corona circular Correlación, coeficiente de Corriente eléctrica
alterna (CA) S 14 circuitos de S 14 circuitos trifásicos S 22 densidad de S 2 flujo magnético de S 16 intensidad de S 1 puente de medición S 20
Corrientes parásitas (o de Foucault) S 23
Cortante (esfuerzo cortante) P 6 Coseno(s)
definición E 2 tabla de valores Z 22 , Z 23
6 2 6 6 1 1 2 14 6 10 2 1 2 2 2
0 10 0 12 0 12 J 8 Q 11 Q 11 B 3 J 8
K 11 H 3 H 2
teorema de E 6 Cotangente
definición E 2 tabla de valores Z 24 , Z 25
Coulomb S 2 Cremona, método de,
o de nudos K 6 Cuadrado B 1 Cubo C 1 Cuña cilindrica C 4 Cuñas (elementos mecánicos Curvatura
radio de
Chebyshev, desigualdades de J 8 Choque o impacto M 8
central M 8 coeficiente de restitución M 8 directo M 8 elástico M 8 oblicuo M 8 plástico M 8 velocidades en el M 8
Chumacera común (o radial) K 1 2 de empuje (o axial) K 12 fricción en K 1 2, Z 20
Defasamiento S Deflexión térmica O Deformación angular P
módulo de P Deformación axial P
módulo de P Deformación (por unidad) P 1 , P Delta, conexión en S
de transformadores S transformación a estrella S
Densidad N 1, O 1 , Z 5, Z determinación de la N
Depósitos, cálculos de D Derivada(s) H
de funciones H Desaceleración L Desecadores U Deslizamiento, valor límite K Desviación estándar J Determinantes D 7, D Diagrama
aceleración-tiempo L 3 esfuerzo-deformación P 1 recorrido-tiempo L 3 velocidad-tiempo L 3
15 3 6 6 2 2 2 28 33 8 10 3 7 1 4 5 6 9 4 8,
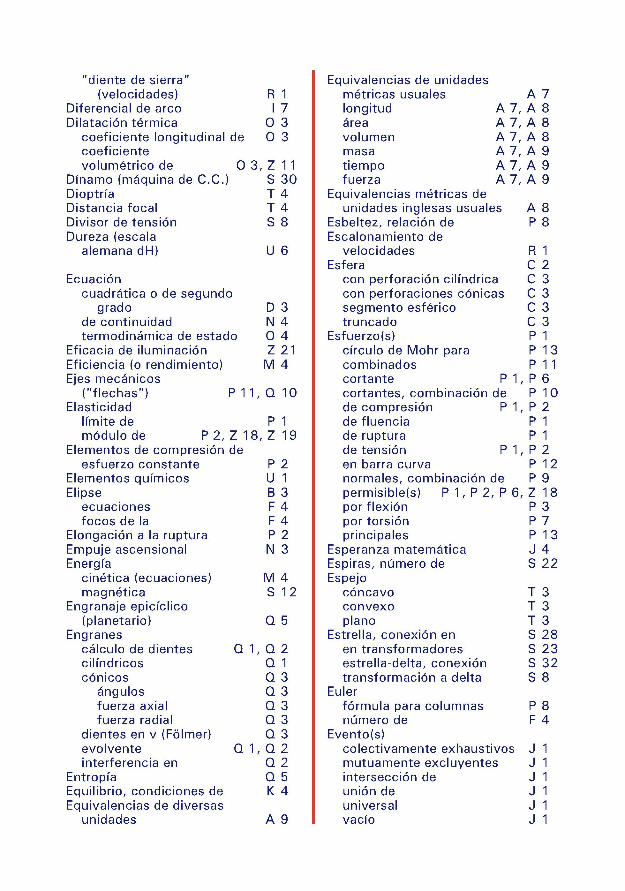
"diente de sierra" (velocidades)
Diferencial de arco Dilatación térmica
coeficiente longitudinal de coeficiente volumétrico de
Dínamo (máquina de C.C. Dioptría Distancia focal Divisor de tensión Dureza (escala
alemana dH)
Ecuación cuadrática o de segund
grado de continuidad termodinámica de estac
Eficacia de iluminación Eficiencia (o rendimiento) Ejes mecánicos
("flechas") Elasticidad
límite de módulo de P 2,
Elementos de compresión esfuerzo constante
Elementos químicos Elipse
ecuaciones focos de la
Elongación a la ruptura Empuje ascensional Energía
cinética (ecuaciones) magnética
Engranaje epicíclico (planetario)
Engranes cálculo de dientes cilindricos cónicos
ángulos fuerza axial fuerza radial
dientes en v (Fólmer) evolvente interferencia en
Entropía Equilibrio, condiciones de Equivalencias de diversas
unidades
0 3
3
0
R 1 I 7
0 3 0 3
, Z 11 S 30 T 4 T 4 S 8
U 6
D 3 N 4 0 4 Z 21
M 4
P 1 1 , Q 1
Z 18 de
Q 1 ,
Q 1 ,
P 1 , Z 19
P 2 U 1 B 3 F 4 F 4 P 2 N 3
M 4 S 12
Q 5
Q 2 Q 1 Q 3 Q 3 Q 3 Q 3 Q 3 Q 2 Q 2 Q 5 K 4
A 9
Equivalencias de unidades métricas usuales A 7 longitud A 7, A 8 área A 7, A 8 volumen A 7, A 8 masa A 7, A 9 tiempo A 7, A 9 fuerza A 7, A 9
Equivalencias métricas de unidades inglesas usuales A 8
Esbeltez, relación de P 8 Escalonamiento de
velocidades R 1 Esfera C 2
con perforación cilindrica C 3 con perforaciones cónicas C 3 segmento esférico C 3 truncado C 3
Esfuerzo(s) P 1 círculo de Mohr para P 1 3 combinados P 1 1 cortante P 1, P 6 cortantes, combinación de P 1 0 de compresión P 1, P 2 de fluencia P 1 de ruptura P 1 de tensión P 1, P 2 en barra curva P 1 2 normales, combinación de P 9 permisible(s) P 1 , P 2, P 6, Z 1 8 por f lexión P 3 por torsión P 7 principales P 1 3
Esperanza matemática J 4 Espiras, número de S 22 Espejo
cóncavo T 3 convexo T 3 plano T 3
Estrella, conexión en S 28 en transformadores S 23 estrella-delta, conexión S 32 transformación a delta S 8
Euler fórmula para columnas P 8 número de F 4
Evento(s) colectivamente exhaustivos J 1 mutuamente excluyentes J 1 intersección de J 1 unión de J 1 universal J 1 vacío J 1
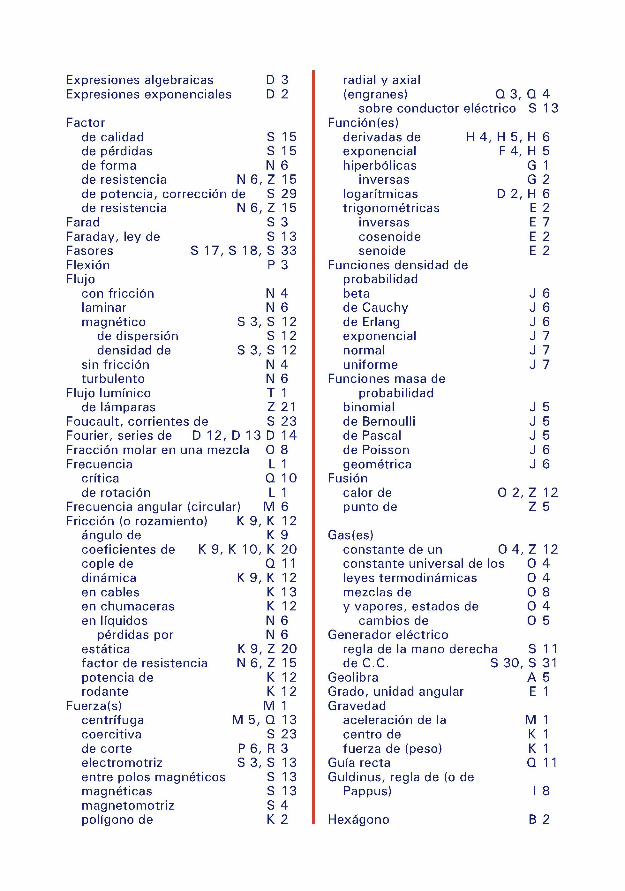
Expresiones algebraicas Expresiones exponenciales
Factor de calidad de pérdidas de forma de resistencia de potencia, corrección de resistencia
Farad Faraday, ley de Fasores Flexión Flujo
con fricción laminar magnético
de dispersión densidad de
sin fr icción turbulento
Flujo lumínico de lámparas
S 17,
Foucault, corrientes de Fourier, series de Fracción molar en Frecuencia
crítica de rotación
Frecuencia angular
D 12,
N 6 de N 6
S 18,
S 3,
S 3,
D 3 D 2
S 15 S 15 N 6 Z 15 S 29 Z 15 S 3 S 13 S 33 P 3
N 4 N 6 S 12 S 12 S 12 N 4 N 6 T 1 Z 21 S 23
D 13 D 14 una mezcla
(circuí Fricción (o rozamiento)
ángulo de coeficientes de copie de dinámica en cables en chumaceras en líquidos
pérdidas por estática
K 9 ,
factor de resistencia potencia de rodante
Fuerza(s) centrífuga coercitiva de corte electromotriz entre polos mag magnéticas magnetomotriz polígono de
néticos
ar) K 9 ,
K 10,
K 9 ,
K 9 N 6
M 5,
P 6 , S 3,
0 8 L 1
Q 10 L 1
M 6 K 12 K 9 K 20 Q 11 K 12 K 13 K 12 N 6 N 6 Z 20 Z 15 K 12 K 12
M 1 Q 13 S 23 R 3 S 13 S 13 S 13 S 4 K 2
radial y axial (engranes) Q 3 ,
sobre conductor eléctrico Función(es)
derivadas de H 4 , H 5, exponencial hiperbólicas
inversas logarítmicas trigonométricas
inversas cosenoide senoide
Funciones densidad de probabilidad beta de Cauchy de Erlang exponencial normal uniforme
Funciones masa de probabilidad
binomial de Bernoulli de Pascal de Poisson geométrica
Fusión calor de punto de
Gas(es) constante de un constante universal de leyes termodinámicas mezclas de y vapores, estados de
cambios de Generador eléctrico
regla de la mano derec de C.C.
Geolibra Grado, unidad angular Gravedad
aceleración de la centro de fuerza de (peso)
Guía recta Guldinus, regla de (o de
Pappus)
Hexágono
F 4 ,
D 2 ,
0 2
0 4 los
ha S 30
Q 4 S 13
H 6 H 5 G 1 G 2 H 6 E 2 E 7 E 2 E 2
J 6 J 6 J 6 J 7 J 7 J 7
J 5 J 5 J 5 J 6 J 6
Z 12 Z 5
Z 12 0 4 0 4 0 8 0 4 0 5
S 11 S 31 A 5 E 1
M 1 K 1 K 1 Q 11
I 8
B 2
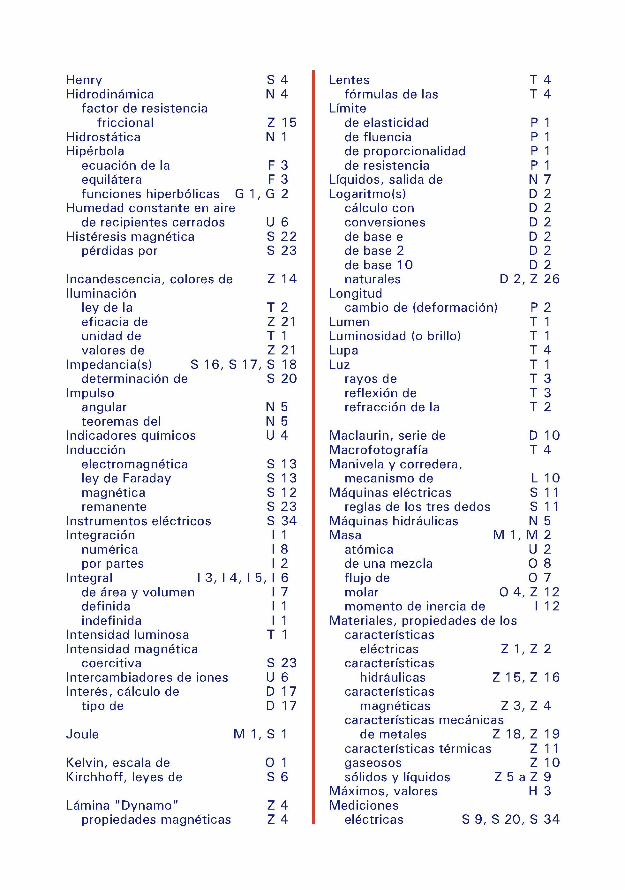
Henry S 4 Hidrodinámica N 4
factor de resistencia friccional Z 1 5
Hidrostática N 1 Hipérbola
ecuación de la F 3 equilátera F 3 funciones hiperbólicas G 1 , G 2
Humedad constante en aire de recipientes cerrados U 6
Histéresis magnética S 22 pérdidas por S 23
Incandescencia, colores de Z 14 Iluminación
ley de la T 2 eficacia de Z 21 unidad de T 1 valores de Z 21
Impedancia(s) S 16, S 17, S 18 determinación de S 20
Impulso angular N 5 teoremas del N 5
Indicadores químicos U 4 Inducción
electromagnética ley de Faraday magnética remanente
Instrumentos eléctricos Integración
numérica I 8 por partes
Integral de área y volumen definida indefinida
Intensidad luminosa Intensidad magnética
coercitiva Intercambiadores de iones Interés, cálculo de
tipo de
Joule
Kelvin, escala de Kirchhoff, leyes de
Lámina "Dynamo" propiedades magnéticas
13 13 12 23 34 1
I 3 . I 4 . I 5 . Ü I 7 I 1 I 1
T 1
23 6 17 17
M 1, S 1
O 1 S 6
Z 4 Z 4
Lentes T 4 fórmulas de las T 4
Límite de elasticidad P de fluencia P de proporcionalidad P de resistencia P
Líquidos, salida de N Logaritmo(s) D
cálculo con D conversiones D de base e D de base 2 D de base 10 D naturales D 2, Z
Longitud cambio de (deformación) P
Lumen T Luminosidad (o brillo) T Lupa T Luz T
rayos de T reflexión de T refracción de la T
Maclaurin, serie de D Macrofotografía T Manivela y corredera,
mecanismo de L Máquinas eléctricas S
reglas de los tres dedos S Máquinas hidráulicas N Masa M 1 , M
atómica U de una mezcla 0 flujo de O molar O 4, Z momento de inercia de I
Materiales, propiedades de los características
eléctricas Z 1 , Z características
hidráulicas Z 1 5, Z características
magnéticas Z 3, Z características mecánicas
de metales Z 1 8, Z características térmicas Z gaseosos Z sólidos y líquidos Z 5 a Z
Máximos, valores H Mediciones
eléctricas S 9, S 20 , S
1 1 1 1 7 2 2 2 2 2 2 26 2 1 1 4 1 3 3 2 10 4 10 11 11 5 2 2 8 7 12 12
2 16 4 19 11 10 9 3 34
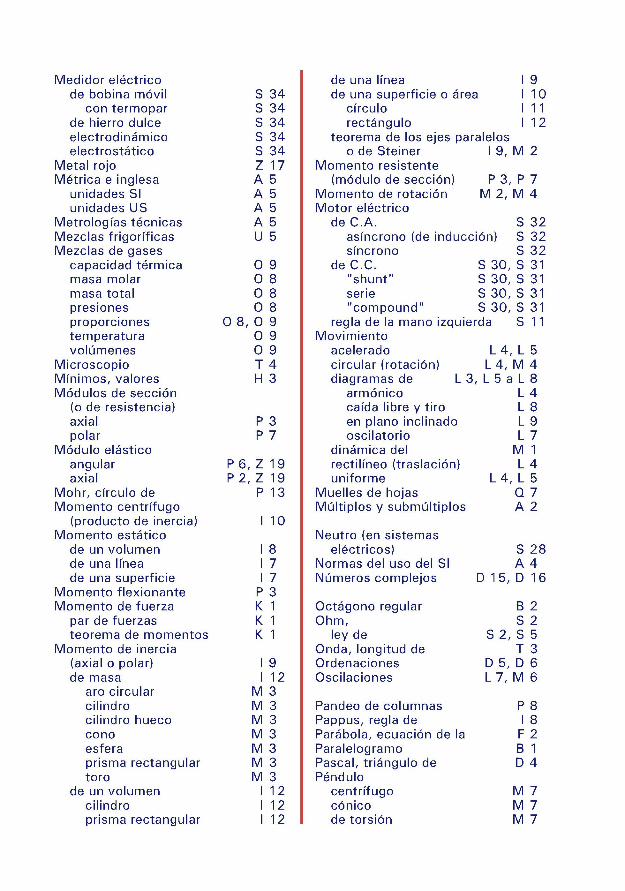
Medidor eléctrico de bobina móvil
con termopar de hierro dulce electrodinámico electrostático
Metal rojo Métrica e inglesa
unidades SI unidades US
Metrologías técnicas Mezclas frigoríficas Mezclas de gases
capacidad térmica masa molar masa total presiones proporciones temperatura volúmenes
Microscopio Mínimos, valores Módulos de sección
(o de resistencia) axial polar
Módulo elástico angular axial
Mohr, círculo de Momento centrífugo
(producto de inercia) Momento estático
de un volumen de una línea de una superficie
Momento flexionante Momento de fuerza
par de fuerzas teorema de momentos
Momento de inercia (axial o polar) de masa
aro circular cilindro cilindro hueco cono esfera prisma rectangular toro
de un volumen cilindro prisma rectangular
S 34 S 34 S 34 S 34 S 34 Z 17 A 5 A 5 A 5 A 5 U 5
0 9 0 8 0 8 0 8
0 8, 0 9 0 9 0 9 T 4 H 3
P 3 P 7
P 6 , Z 19 P 2 , Z 19
P 13
I 10
I 8 I 7 I 7
P 3 K 1 K 1 K 1
I 9 I 12
M 3 M 3 M 3 M 3 M 3 M 3 M 3
I 12 I 12 I 12
de una línea I 9 de una superficie o área I 10
círculo I 1 1 rectángulo I 1 2
teorema de los ejes paralelos o de Steiner I 9, M 2
Momento resistente (módulo de sección)
Momento de rotación Motor eléctrico
deC.A . asincrono (de inducción síncrono
de C.C. S "shunt" S serie S "compound" S
regla de la mano izquierda Movimiento
acelerado circular (rotación) diagramas de L 3
armónico caída libre y tiro en plano inclinado oscilatorio
dinámica del rectilíneo (traslación) uniforme L 4
Muelles de hojas Múltiplos y submúltiplos
P 3 , P M 2, M
30, 30, 30, 30,
L 4 L 4 , L 5 a
7 4
32 32 32 31 31 31 31 11
5 4 8 4 8 9 7 1 4 5 7 2
S 2 ,
Neutro (en sistemas eléctricos) S 28
Normas del uso del SI A 4 Números complejos D 1 5, D 16
Octágono regular Ohm,
ley de Onda, longitud de Ordenaciones Oscilaciones
Pandeo de columnas P 8 Pappus, regla de I 8 Parábola, ecuación de la F Paralelogramo B Pascal, triángulo de D Péndulo
centrífugo M cónico M de torsión M
B S S T
D 5, D L 7 , M
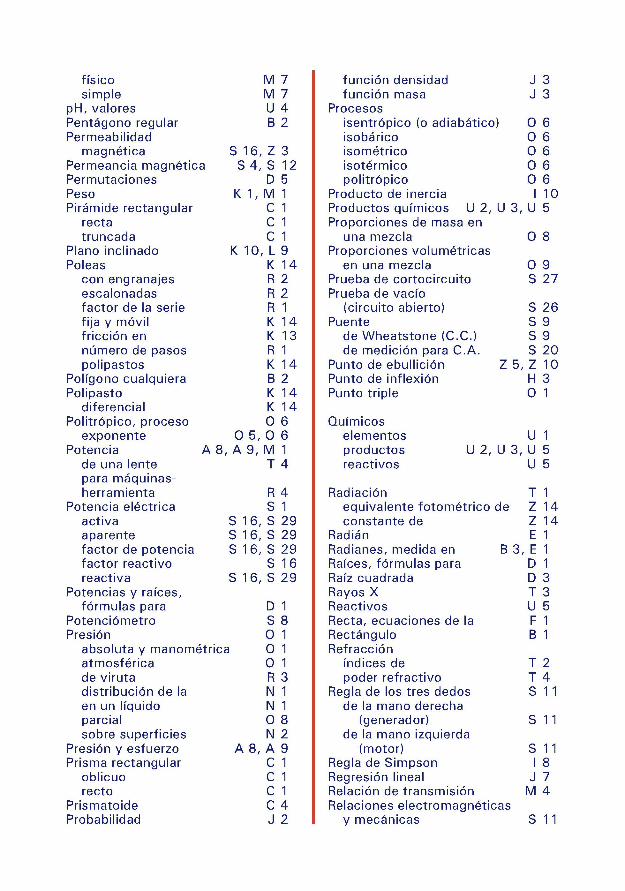
físico simple
pH, valores Pentágono regular Permeabilidad
magnética Permeancia magnética Permutaciones Peso Pirámide rectangular
recta truncada
Plano inclinado Poleas
con engranajes escalonadas factor de la serie fija y móvil fricción en número de pasos polipastos
Polígono cualquiera Polipasto
diferencial Politrópico, proceso
exponente Potencia A 8
de una lente para máquinas-herramienta
Potencia eléctrica activa aparente factor de potencia factor reactivo reactiva
Potencias y raíces, fórmulas para
Potenciómetro Presión
S 16 S 4
K 1,
K 10
0 5, , A 9 ,
S 16 S 16 S 16
S 16
absoluta y manométrica atmosférica de viruta distribución de la en un líquido parcial sobre superficies
Presión y esfuerzo Prisma rectangular
oblicuo recto
Prismatoide Probabilidad
A 8,
M 7 M 7 U 4 B 2
Z 3 S 12 D 5 M 1 C 1 C 1 C 1
, L 9 K 14 R 2 R 2 R 1 K 14 K 13 R 1 K 14 B 2 K 14 K 14 0 6 0 6 M 1 T 4
R 4 S 1 S 29 S 29 S 29 S 16 S 29
D 1 S 8 0 1 0 1 0 1 R 3 N 1 N 1 0 8 N 2 A 9 C 1 C 1 C 1 C 4 J 2
función densidad función masa
Procesos isentrópico (o adiabáticc isobárico isométrico isotérmico politrópico
Producto de inercia Productos químicos U 2, Proporciones de masa en
una mezcla Proporciones volumétricas
en una mezcla Prueba de cortocircuito Prueba de vacío
(circuito abierto) Puente
de Wheatstone (C.C.) de medición para C.A.
Punto de ebullición Punto de inflexión Punto triple
Químicos elementos productos U 2, reactivos
Radiación
)
U 3
Z 5
U 3
equivalente fotométr ico de constante de
Radián Radianes, medida en Raíces, fórmulas para Raíz cuadrada Rayos X Reactivos Recta, ecuaciones de la Rectángulo Refracción
índices de poder refractivo
Regla de los tres dedos de la mano derecha
(generador) de la mano izquierda
(motor) Regla de Simpson Regresión lineal Relación de transmisión
B 3
Relaciones electromagnéticas y mecánicas
J 3 J 3
0 6 0 6 0 6 0 6 0 6
I 10 U 5
0 8
0 9 S 27
S 26 S 9 S 9 S 20
, Z 10 H 3 0 1
U 1 U 5 U 5
T 1 Z 14 Z 14 E 1
, E 1 D 1 D 3 T 3 U 5 F 1 B 1
T 2 T 4 S 11
S 11
S 11 I 8
J 7 M 4
S 11
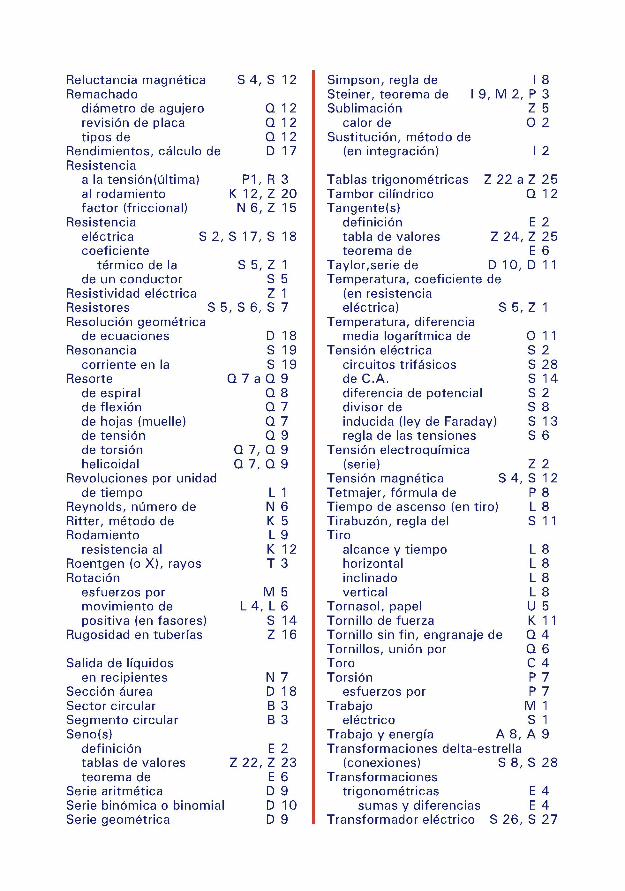
Reluctancia magnética Remachado
diámetro de agujero revisión de placa tipos de
Rendimientos, cálculo de Resistencia
a la tensión(última) P1 , R 3 al rodamiento K 12, Z 20 factor (friccional) N 6, Z 15
Resistencia eléctrica S 2, S 17, S 18 coeficiente
térmico de la S 5, Z 1 de un conductor S 5
Resistividad eléctrica Z 1 Resistores S 5, S 6, S 7 Resolución geométrica
de ecuaciones D 1 8 Resonancia S 1 9
corriente en la S 1 9 Resorte Q 7 a Q 9
de espiral Q 8 de flexión Q 7 de hojas (muelle) Q 7 de tensión Q 9 de torsión Q 7, Q 9 helicoidal Q 7, Q 9
Revoluciones por unidad de tiempo L 1
Reynolds, número de N 6 Ritter, método de K 5 Rodamiento L 9
resistencia al K 1 2 Roentgen (o X), rayos T 3 Rotación
esfuerzos por M 5 movimiento de L 4 , L 6 positiva (en fasores) S 14
Rugosidad en tuberías Z 16
Salida de líquidos en recipientes
Sección áurea Sector circular Segmento circular Seno(s)
definición tablas de valores teorema de
Serie aritmética Serie binómica o binomial Serie geométrica
S 4, S 12
Q 12 Q 12 Q 12 D 17
Simpson, regla de Steiner, teorema de Sublimación
calor de Susti tución, método de
(en integración)
N 7 D 18 B 3 B 3
E 2 Z 22 , Z 23
E 6 D 9 D 10 D 9
I 8 I 9, M 2, P 3
Z 5 O 2
I 2
Tablas trigonométricas Z 22 a Z 25 Tambor cilindrico Q 1 2 Tangente(s)
definición E 2 tabla de valores Z 24 , Z 25 teorema de E 6
Taylor,serie de D 10, D 1 1 Temperatura, coeficiente de
(en resistencia eléctrica) S 5, Z 1
Temperatura, diferencia media logarítmica de 0 11
Tensión eléctrica S 2 circuitos trifásicos S 28 deC.A . S 14 diferencia de potencial S 2 divisor de S 8 inducida (ley de Faraday) S 13 regla de las tensiones S 6
Tensión electroquímica (serie) Z 2
Tensión magnética S 4, S 12 Tetmajer, fórmula de P 8 Tiempo de ascenso (en tiro) L 8 Tirabuzón, regla del S 1 1 Tiro
alcance y tiempo L 8 horizontal L 8 inclinado L 8 vertical L 8
Tornasol, papel U 5 Tornillo de fuerza K 1 1 Tornillo sin f in , engranaje de Q 4 Tornillos, unión por Q 6 Toro C 4 Torsión P 7
esfuerzos por P 7 Trabajo M 1
eléctrico S 1 Trabajo y energía A 8, A 9 Transformaciones delta-estrella
(conexiones) S 8, S 28 Transformaciones
trigonométricas E 4 sumas y diferencias E 4
Transformador eléctrico S 26 , S 27
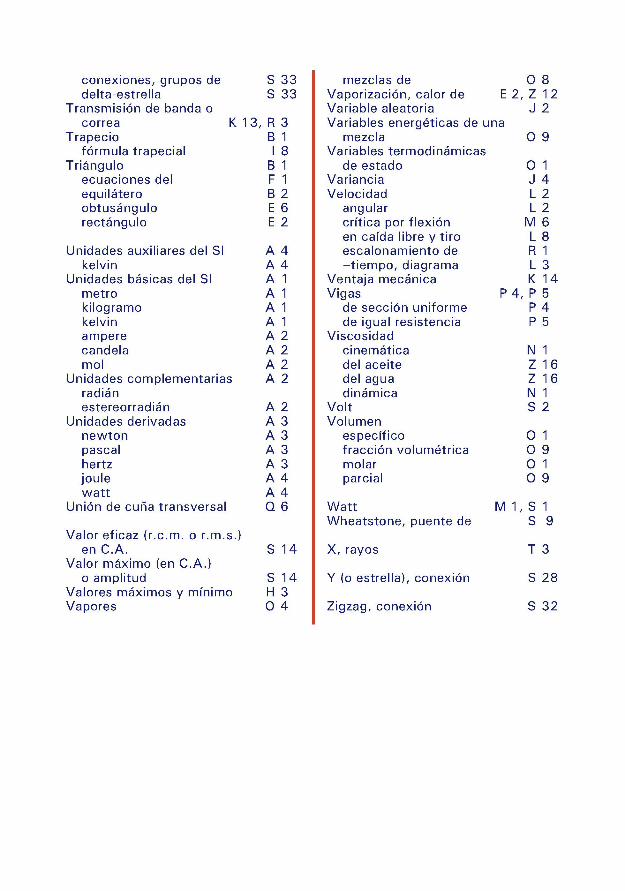
conexiones, grupos de delta-estrella
Transmisión de banda o correa K 1 3
Trapecio fórmula trapecial
Triángulo ecuaciones del equilátero obtusángulo rectángulo
Unidades auxiliares del SI kelvin
Unidades básicas del SI metro kilogramo kelvin ampere candela mol
Unidades complementarias radián estereorradián
Unidades derivadas newton pascal hertz joule wat t
Unión de cuña transversal
S 33 S 33
, R 3 B 1 I 8
B 1 F 1 B 2 E 6 E 2
A 4 A 4 A 1 A 1 A 1 A 1 A 2 A 2 A 2 A 2
A 2 A 3 A 3 A 3 A 3 A 4 A 4 Q 6
mezclas de Vaporización, calor de Variable aleatoria
E 2
Variables energéticas de una mezcla
Variables termodinámicas de estado
Variancia Velocidad
angular crítica por flexión en caída libre y tiro escalonamiento de - t iempo, diagrama
Ventaja mecánica Vigas
de sección uniforme de igual resistencia
Viscosidad cinemática del aceite del agua dinámica
Volt Volumen
específico fracción volumétrica molar parcial
Wat t Wheatstone, puente de
P 4
M 1
0 8 , Z 12
J 2
0 9
0 1 J 4 L 2 L 2
M 6 L 8 R 1 L 3 K 14
, P 5 P 4 P 5
N 1 Z 16 Z 16 N 1 S 2
0 1 0 9 0 1 0 9
S 1 S 9
Valor eficaz (r.c.m. o r.m.s.) en C.A. S 14
Valor máximo (en C.A.) o amplitud S 1 4
Valores máximos y mínimo H 3 Vapores O 4
X, rayos
Y (o estrella), conexión
Zigzag, conexión
T 3
S 28
S 32
ÍNDICE DE LA PARTE II
Análisis estadístico axiomas de probabilidad curva característica de
aceptación determinación de para
valores discretos dados cálculo de métodos gráficos
diagramas de Venn para la representación de eventos
distribución de Gauss
normalizada función de distribución
densidad de probabilidad, normal
F'1
E'10
E'6 E'6 E'6
E'1
E'7
E'7 exponencial como función
de confiabilidad hipergeométria
función de error
E'13 E'9 E'8
integral de probabilidad de Gauss E'8
media X y valor esperado \i E'3-E'5
muestreo E'9 teorema del límite central E'3 seguridad de un muestreo E'1 0 valor AQL E'11 variable aleatoria A E'2
Análisis de esfuerzos conversión a isostática P'7 ecuación de la curva elástica P'4 energía de deformación U
a la f lexión P'4 estado de esfuerzo en
tres dimensiones P"l, P'2 flexión y torsión en ejes P"\ momentos de inercia I y
módulos de sección S, F3 principales P"\ teorema de Steiner F3 viga de sección transversal
uniforme P'4, P'5, P'6 vigas hiperestáticas P'7
Ecuación algebraica ceros, raíces, G'1
de cualquier grado, definición, método de Horner, relación entre ceros y
coeficientes, solución aproximada,
aproximación por interpolación,
método de la secante, método de Newton, regula falsi,
solución general, teorema de Descartes,
G"l-G'4 G'1
G'2-G'4
G'1 G'5-G'8
G'8 G'7 G'6 G'8 G'2 G'1
Ecuación diferencial D'1 lineal D'2, D'3
orden n con coeficientes constantes D'6-D'7 primer orden D'4 segundo orden D'4
con coeficientes constantes
ordinaria parcial resolución de una solución general de la EDL
no homogénea reducción del orden por
sustitución de variable para la resolución de una ED de orden n
D'5 D'1 D'1
ED D'2
D'2
D'8-D'12
0 '7, 0 1 ' ,
Engranes, 0 '1 -0 '9 adendo, 0 ' 1 , 0 ' 3 capacidad de carga del
diente, 0 '4 , 0'5 cilindricos rectos, claro en el fondo, cónicos, dedendo, diámetro de
adendo, O' dedendo, 02 ' , O' la base, O' paso, O'
O'8 0 '4 0 '1
0 '7 -0 '8 0 ' 1 , 0 '3
dientes de evolvente dimensiones del extensión, módulo
circular, normal,
paso circular, normal,
razones de anch
piñón, 0'1
o de diente,
-0 '6 0 '6 0 '2
0'1 0'1
0'1 0'1 0 '6
Función de fracciones racionales B'1 descomposición en fracciones
parciales B'1
Ingeniería de control U'1 actuador bloque de función circuito
completo amplitud de la
respuesta de control
cantidades y funciones del
componentes del estabilidad del función de
transferencia del comparador controlador
cálculo para un lineal, determinación
gráfica variable de salida del
criterio de Nyquist de Hurwitz
diagrama de Bode U'3, U'22,
U'29, de control
estructuras básicas línea de acción punto de ramificación regla para sumar
elemento de control
determinación del U'25 elección del tipo de
-U'35 U'6 U'3
U'24
U'3
U'7 U'4 U'18
U'9 U'6 U'6 U'18
U'21 U'6
U'19 U'18
U'23 U'31 U'3 U'4 U'3 U'3 U'4
-U'26 U'20
final más importante reglas para P, Pl y PID sistemas de
de retraso de primer orden
(PD)-Ti y (PID)-Ti de combinación en grupo
equipo de control final de medición
factor de control frecuencia angular
característica características de
respuesta en de cruce de ganancia de vértice propia
función de transferencia de circuito abierto forma normalizada
mezcla producto suma
ganancia de circuito abierto punto de regulación regla
ampliada de retroalimentación
de retroalimentación sistema controlado
variable controlada punto de medición de la sobrepaso de la
sobrepaso de la variable controlada
tiempo de retraso de transición invento equivalente
transformada de Laplace variable
controlada final de error de perturbación de referencia reguladora retroalimentada
U'6 U'20 U'33 U'6
U'1 4
U'1 7
U'6 U'5 U'7
U'1
U'3 U'7 U'3 U'1
U'7
U'1 2 U'1 2 U'1 2 U'7 U'6
U'10 U'9 U'4 U'5 U'5 U'8 U'2 U'8
U'1 U'2 U'2 U'10
U'5 U'6 U'6 U'6 U'6 U'5
Manufactura y procesos dispositivos de corte R'1
embutidos R'6, R'7 fuerzas de sujeción
de las pieza de extrusión
resistencia de fluencia media
explicación de la
R’7 R'8
R'8
simbología R'5 (R'1 a R'4) labrado de lámina en frío
diámetro inicial de la pieza base
primera y segunda etapas
maquinado R"l, R'2, R'3 potencia y fuerza de
corte de avance
Maquinaria y elementos cojines de
deslizamiento Q'5, cortante debido a carga
transversal deformación dimensiones del cubo ejes y árboles embragues
cálculo de la superficie de fricción
calentamiento permisible
de fricción Q'7, pérdida de energía
estabilidad frenos de fricción de
disco zapatas
presión de contacto uniones de pasador de
abrazaderas cono ejes
rebordes múltiples ranura
Matemáticas financieras amortización
capital insoluto tabla de
anualidades cierta
R'6
R'6
R'6 , R'4
R'2 R'4
Q'6
Q'1 Q'1 Q'3 Q'1
Q'7
Q'8 Q'8 Q'7 Q'1 Q'9 Q'9 Q'9 Q'6 Q'2 Q'2 Q'2 Q'3 Q'3 Q'2
F'5 F'5 F'5 F'4 F'4
contingente notación ordinaria relaciones entre
casos especiales de anualidades F'6 anticipada creciente decreciente diferida notación perpetuidad relaciones entre diferentes
tipos de anualidades tasas de descuentos
efectiva fuerza de descuento F'2 nominal relación entre d, d * , y * relación entre interés y
descuento tasa efectiva de interés
de descuento nominal
tasas de interés acumulación de interés
compuesto vectorial efectiva fuerza F'1 nominal notación relaciones entre i, i * , y *
Radiaciones carga de ionización corriente de ionización energía de ionización Wi
F'4 F'4 F'4 F'4
F'7 F'6 F'6 F'6 F'6 F'6 F'6
F'6 F'2 F'2 F'3 F'3
F'3 F'3 F'3 F'3 F'1
F'1 A'1 F'1 F'3 F'1 F'1 F'1
T'1 T'1 T'2
radiabsorción D T'2 radiación ionizante radiactividad
absorción equivalente constante de actividad
Sistemas eléctricos circuitos y redes corriente nominal instalaciones interruptores resoluciones de redes
lineales
T'1 T'2 T'2 T'2
S'1 S'3 S'3 S'3
S'1
teorema de superposición S'1 de Thévenin S'2
Tablas cantidades características
para el maquinado Z'3 esfuerzos permisibles por
flexión o torsión Z'3 propiedades térmicas de
líquidos Z '1 ,Z '2 superficies no deslizantes Z'4 valores de pe Z'4 valores estadísticos Z'5-Z'6
Transformadas de funciones de Fourier C'1 de Laplace C 4 - C 5 reglas de operación C ' 1 , C 3
tabla de correspondencia C'6 teorema de convolución C'5
Vector cálculo de los componentes
de un componente
escalar de un coseno director de un diferencia magnitud de un producto de un escalar
por un de dos vectores libres escala de dos vectores
libres vectorial de dos vectores
libres suma unitario
A'1
A'1 A'1 A '2 A'1
A'1 A'3
A'3
A'3 A '2 A'1