pertemuan 7 alin 2017 bilqis - subakti.com · hasil harus benar, krn titik ini berada di kedua...
TRANSCRIPT
bilqis 1
Pertemuan 7
Alin 2017
BilqisPersamaan parametrik, jarak antara
titik dan bidang,
Transformasi Linier
bilqis 2
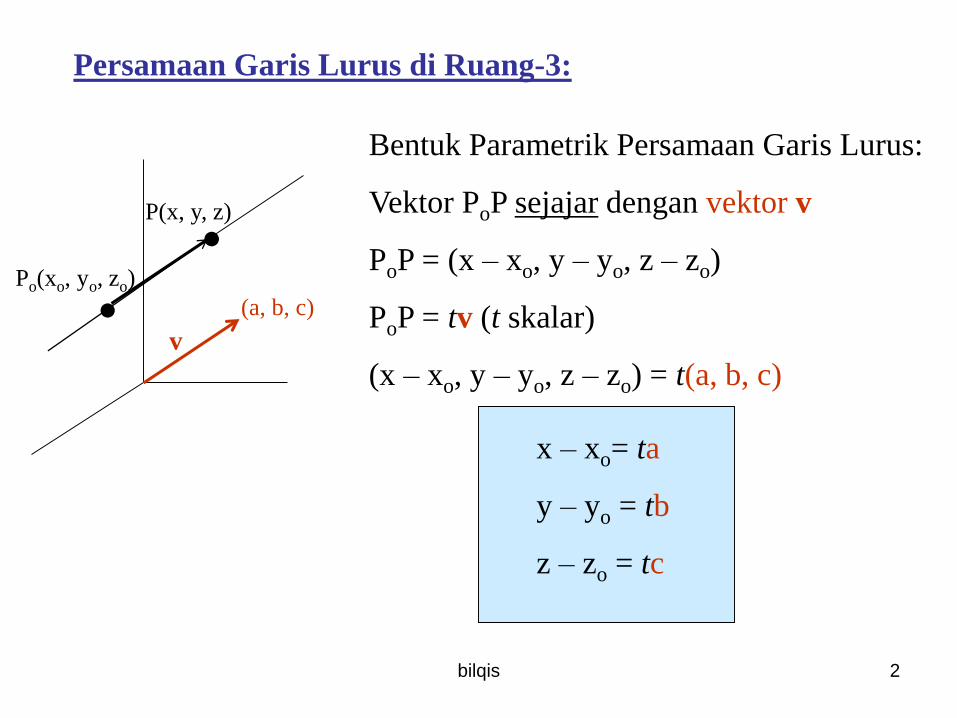
Persamaan Garis Lurus di Ruang-3:
Bentuk Parametrik Persamaan Garis Lurus:
Vektor PoP sejajar dengan vektor v
PoP = (x – xo, y – yo, z – zo)
PoP = tv (t skalar)
(x – xo, y – yo, z – zo) = t(a, b, c)
(a, b, c)
v•
•P(x, y, z)
Po(xo, yo, zo)
x – xo= ta
y – yo = tb
z – zo = tc
bilqis 3
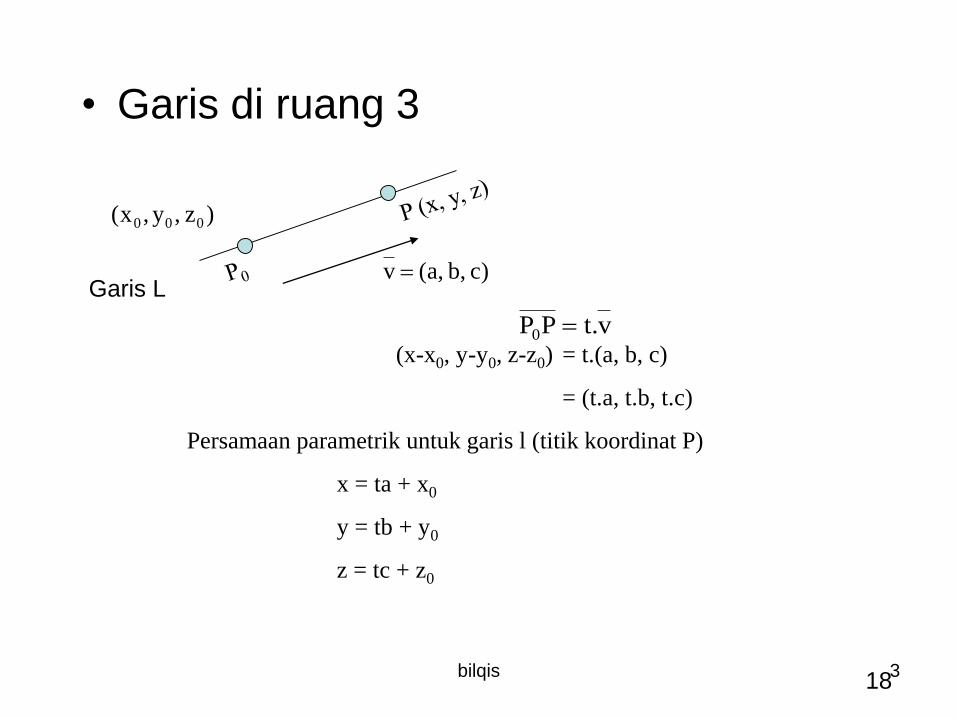
• Garis di ruang 3
)z ,y,x( 000
)c b, a,(v =
(x-x0, y-y0, z-z0) = t.(a, b, c)
= (t.a, t.b, t.c)
Persamaan parametrik untuk garis l (titik koordinat P)
x = ta + x0
y = tb + y0
z = tc + z0
v.tPP0 =
18
Garis L
bilqis 4
bilqis 5
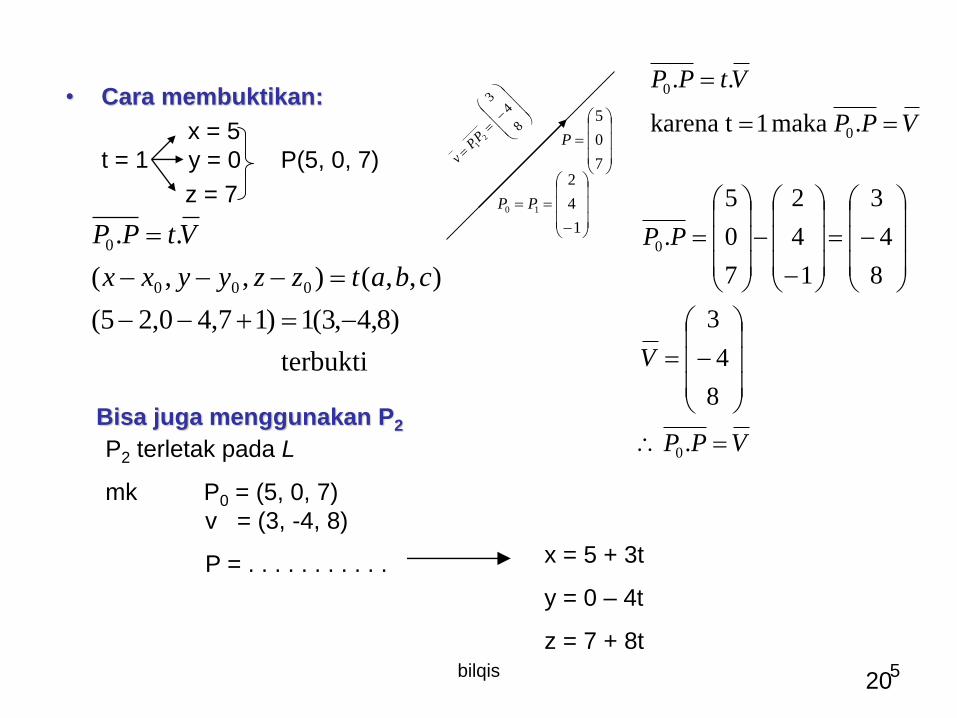
• Cara membuktikan:
x = 5
t = 1 y = 0 P(5, 0, 7)
z = 7
bukti ter
)8,4,3(1)17,40,25(
),,(),,(
..
000
0
−=+−−
=−−−
=
cbatzzyyxx
VtPP
Bisa juga menggunakan P2
P2 terletak pada L
mk P0 = (5, 0, 7)
v = (3, -4, 8)
P = . . . . . . . . . . . x = 5 + 3t
y = 0 – 4t
z = 7 + 8t
VPP
VtPP
==
=
. maka 1 tkarena
..
0
0
VPP
V
PP
=
−=
−=
−
−
=
.
8
4
3
8
4
3
1
4
2
7
0
5
.
0
0
−
=
=
8
43
21P
Pv
=
7
0
5
P
−
==
1
4
2
10 PP
20
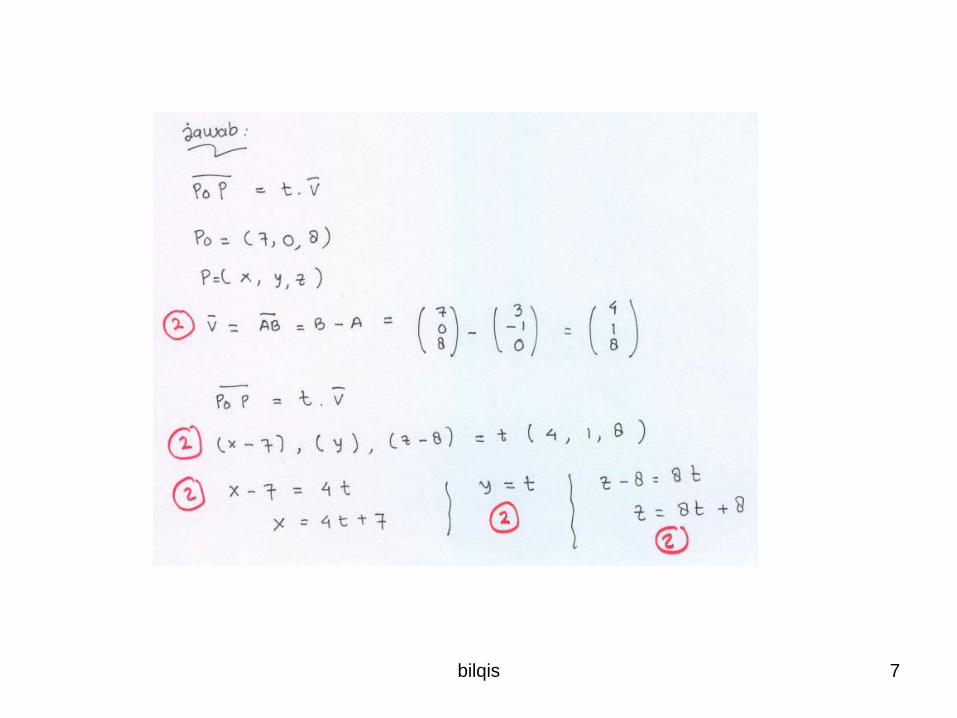
Contoh soal No.3
bilqis 6
bilqis 7
bilqis 8
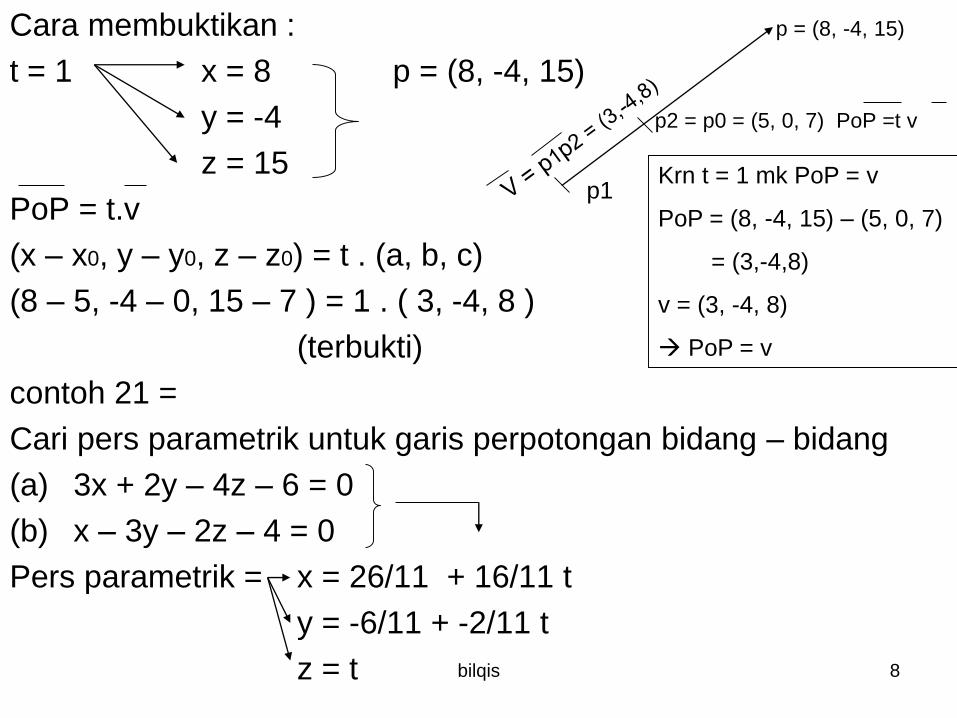
Cara membuktikan : p = (8, -4, 15)
t = 1 x = 8 p = (8, -4, 15)
y = -4 p2 = p0 = (5, 0, 7) PoP =t v
z = 15
PoP = t.v
(x – x0, y – y0, z – z0) = t . (a, b, c)
(8 – 5, -4 – 0, 15 – 7 ) = 1 . ( 3, -4, 8 )
(terbukti)
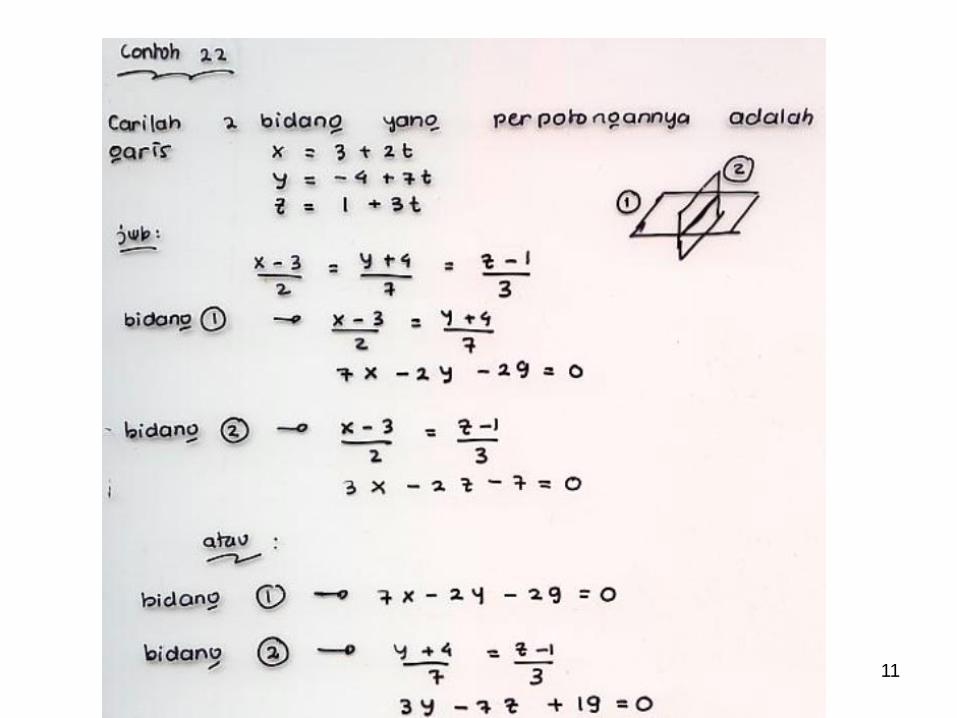
contoh 21 =
Cari pers parametrik untuk garis perpotongan bidang – bidang
(a) 3x + 2y – 4z – 6 = 0
(b) x – 3y – 2z – 4 = 0
Pers parametrik = x = 26/11 + 16/11 t
y = -6/11 + -2/11 t
z = t
p1Krn t = 1 mk PoP = v
PoP = (8, -4, 15) – (5, 0, 7)
= (3,-4,8)
v = (3, -4, 8)
→ PoP = v
bilqis 9
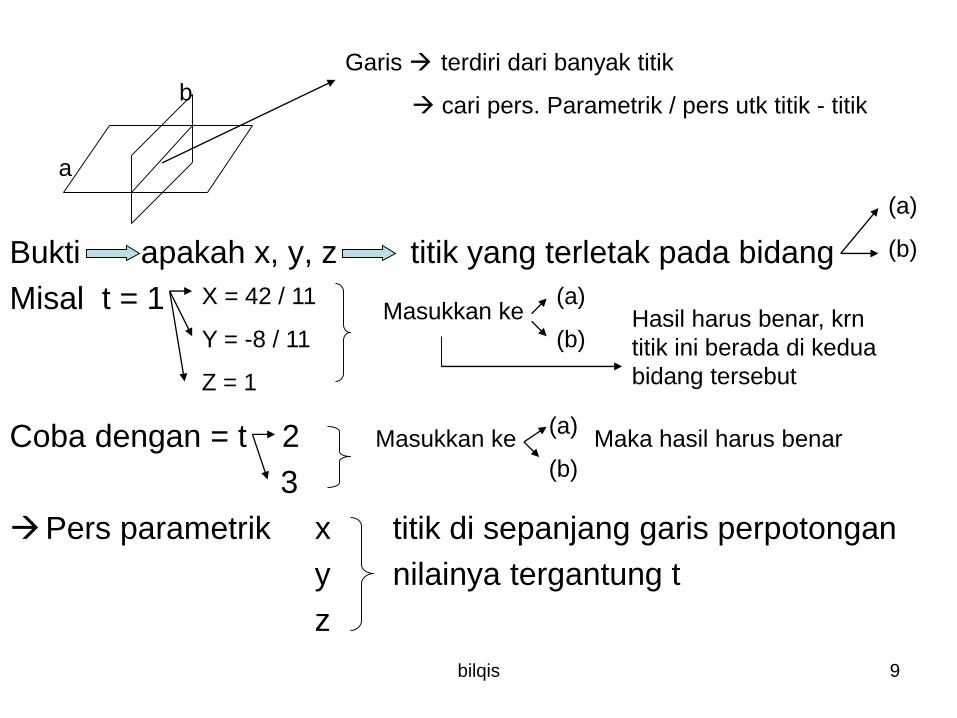
Bukti apakah x, y, z titik yang terletak pada bidang
Misal t = 1
Coba dengan = t 2
3
→Pers parametrik x titik di sepanjang garis perpotongan
y nilainya tergantung t
z
a
b
Garis → terdiri dari banyak titik
→ cari pers. Parametrik / pers utk titik - titik
(a)
(b)
X = 42 / 11
Y = -8 / 11
Z = 1
Masukkan ke (a)
(b)Hasil harus benar, krn
titik ini berada di kedua
bidang tersebut
(a)
(b)
Masukkan ke Maka hasil harus benar
bilqis 10
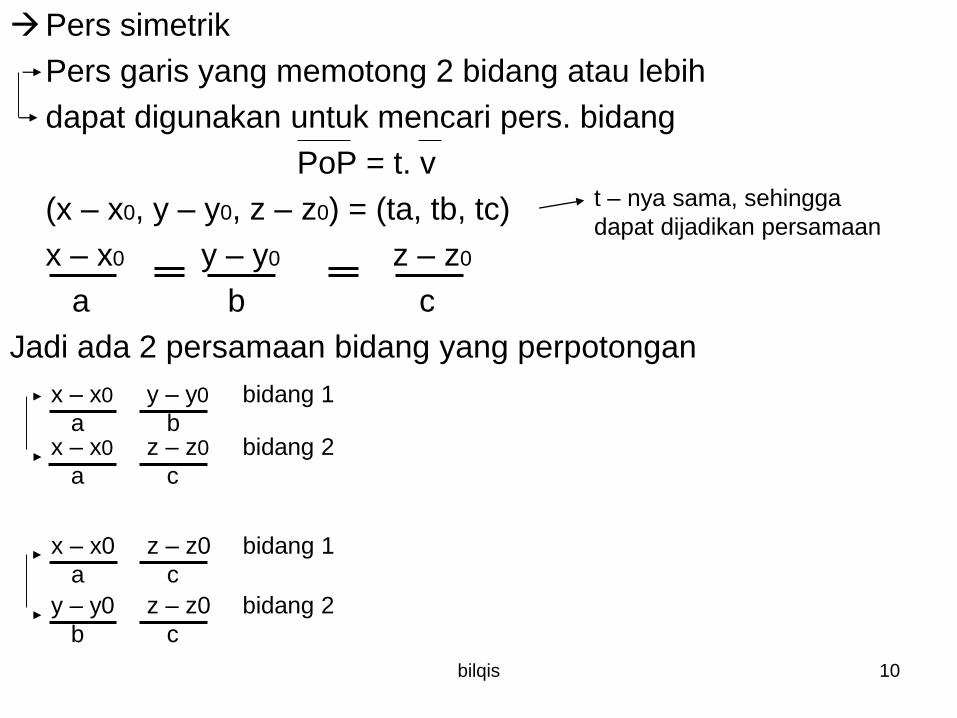
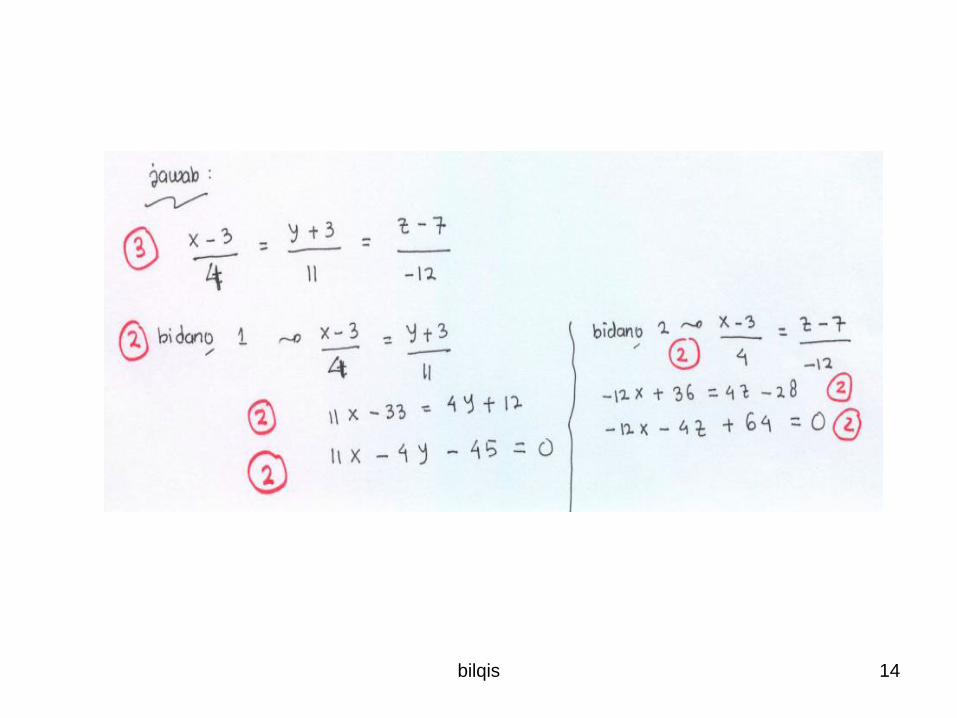
→Pers simetrik
Pers garis yang memotong 2 bidang atau lebih
dapat digunakan untuk mencari pers. bidang
PoP = t. v
(x – x0, y – y0, z – z0) = (ta, tb, tc)
x – x0 y – y0 z – z0
a b c
Jadi ada 2 persamaan bidang yang perpotongan
t – nya sama, sehingga
dapat dijadikan persamaan
x – x0 y – y0 bidang 1
a b x – x0 z – z0 bidang 2
a c
x – x0 z – z0 bidang 1
a c
y – y0 z – z0 bidang 2
b c
bilqis 11
bilqis 12
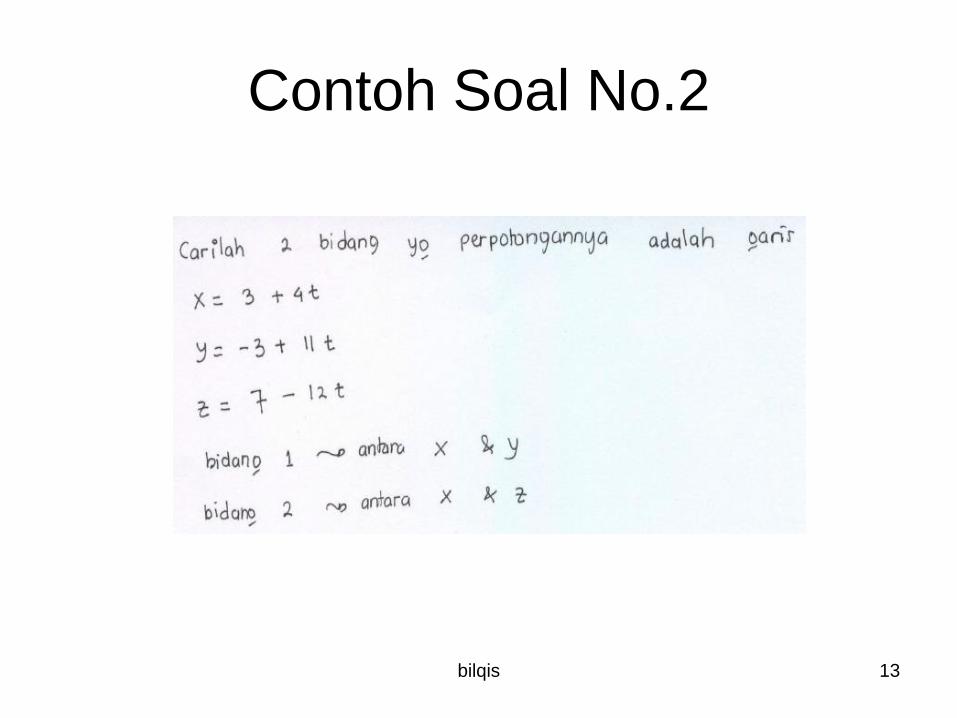
Contoh Soal No.2
bilqis 13
bilqis 14
bilqis 15
bilqis 16
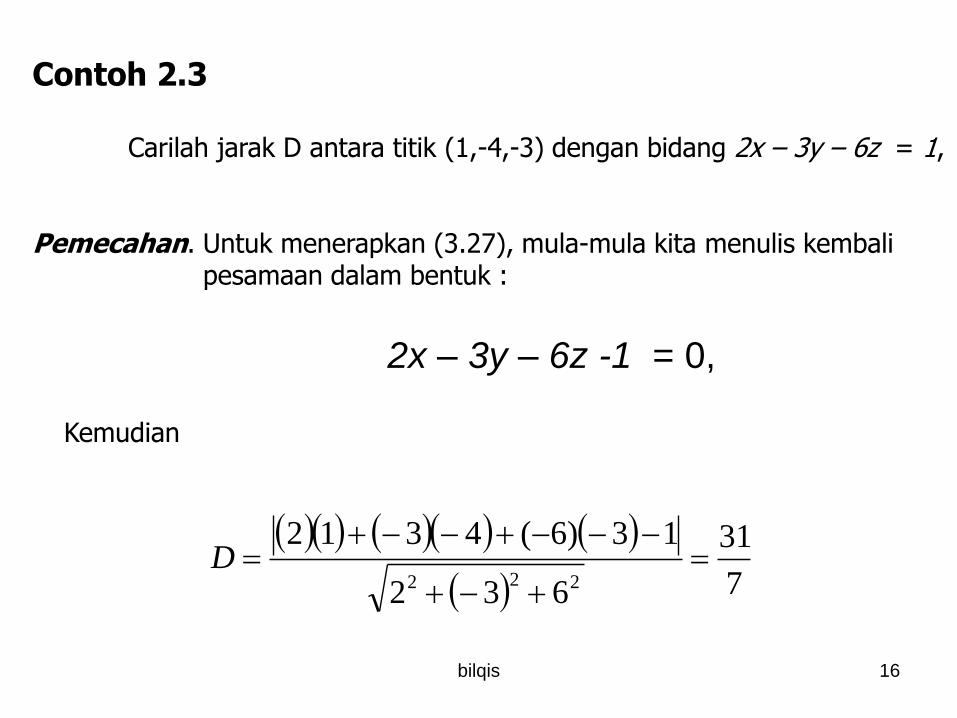
Contoh 2.3
Carilah jarak D antara titik (1,-4,-3) dengan bidang 2x – 3y – 6z = 1,
Pemecahan. Untuk menerapkan (3.27), mula-mula kita menulis kembali pesamaan dalam bentuk :
Kemudian
( )( ) ( )( ) ( )
( ) 7
31
632
13)6(4312
222=
+−+
−−−+−−+=D
2x – 3y – 6z -1 = 0,
bilqis 17
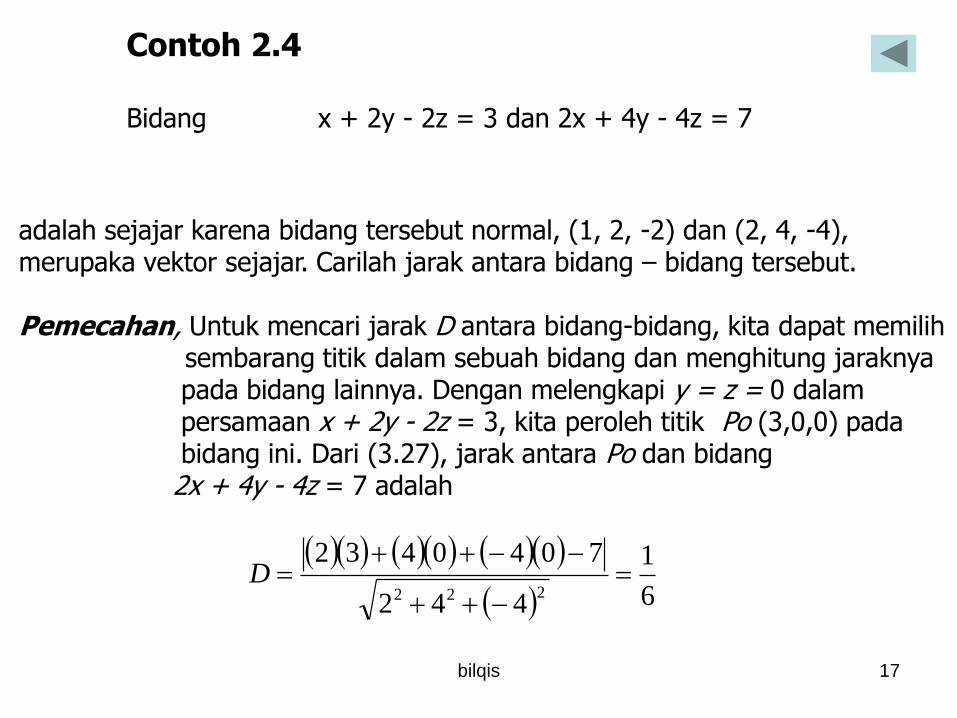
adalah sejajar karena bidang tersebut normal, (1, 2, -2) dan (2, 4, -4), merupaka vektor sejajar. Carilah jarak antara bidang – bidang tersebut.
Pemecahan, Untuk mencari jarak D antara bidang-bidang, kita dapat memilih sembarang titik dalam sebuah bidang dan menghitung jaraknya pada bidang lainnya. Dengan melengkapi y = z = 0 dalam persamaan x + 2y - 2z = 3, kita peroleh titik Po (3,0,0) pada bidang ini. Dari (3.27), jarak antara Po dan bidang 2x + 4y - 4z = 7 adalah
Contoh 2.4
Bidang x + 2y - 2z = 3 dan 2x + 4y - 4z = 7
( )( ) ( )( ) ( )( )
( ) 6
1
442
7040432
222=
−++
−−++=D
bilqis 18
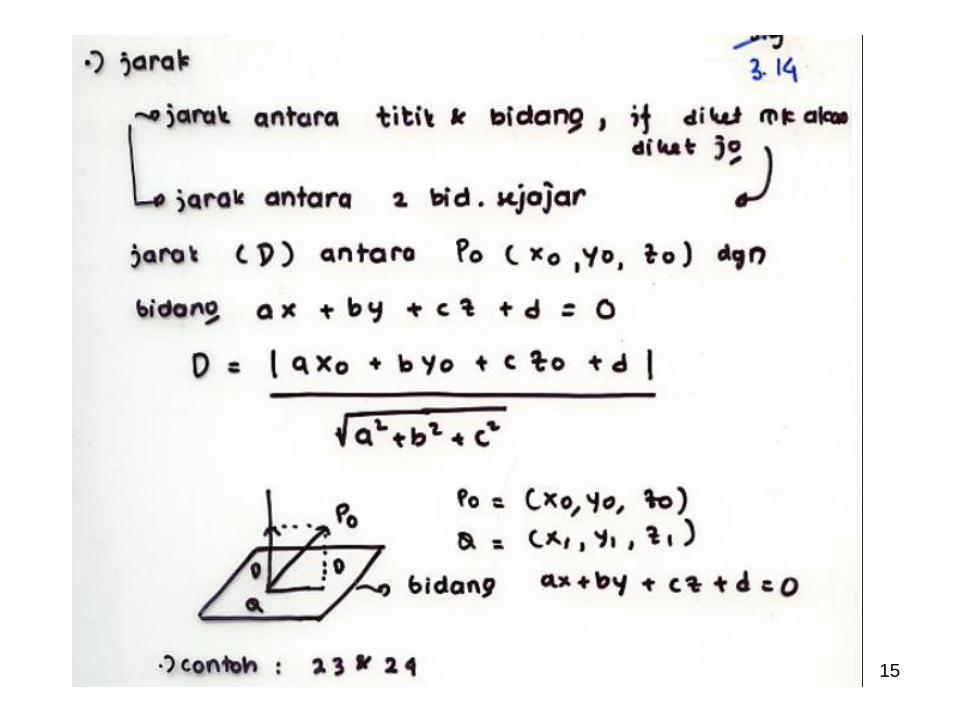
Jarak antara dua bidang datar yang sejajar:
Misalkan kedua bidang datar itu adalah dan
1. Tentukan sebuah titik T di bidang
2. Kemudian hitung jarak antara titik T dengan bidang
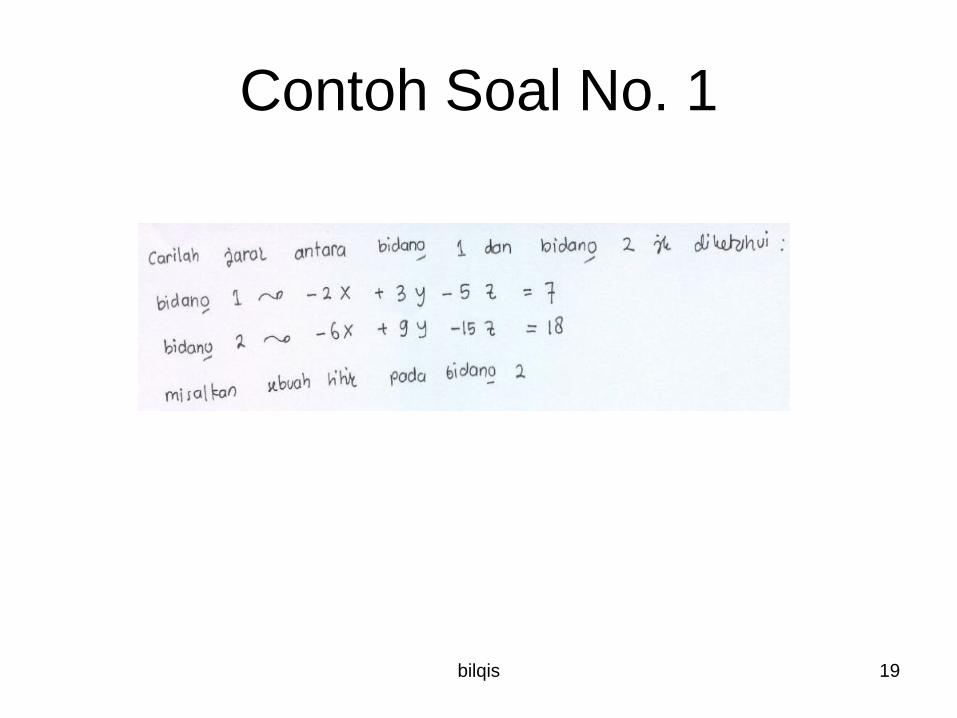
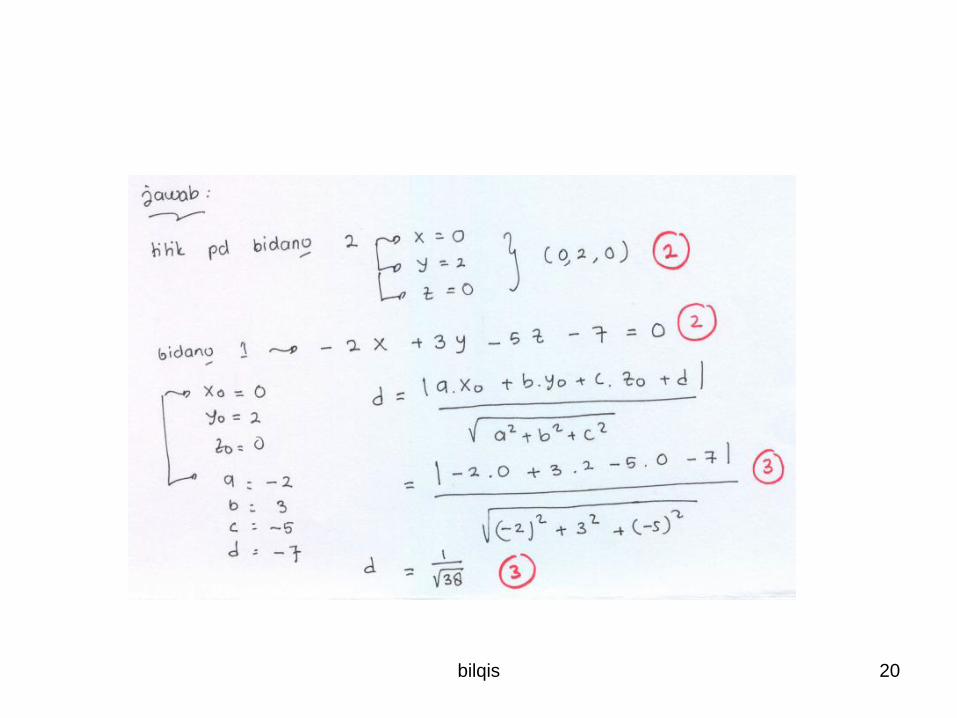
Contoh Soal No. 1
bilqis 19
bilqis 20
bilqis 21
TUJUAN INSTRUKSIONAL KHUSUS
Setelah menyelesaikan pertemuan ini
mahasiswa diharapkan :
– Dapat mengetahui matriks-matriks yang
digunakan untuk transformasi linier
– Dapat mengetahui aplikasi transformasi linier
bilqis 22
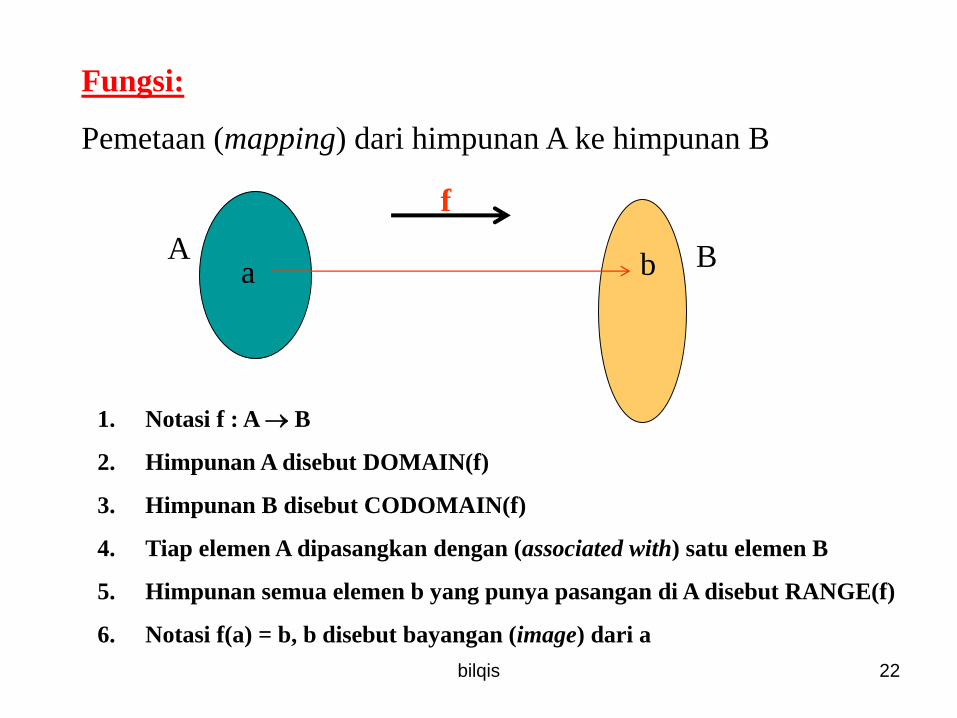
Fungsi:
Pemetaan (mapping) dari himpunan A ke himpunan B
1. Notasi f : A → B
2. Himpunan A disebut DOMAIN(f)
3. Himpunan B disebut CODOMAIN(f)
4. Tiap elemen A dipasangkan dengan (associated with) satu elemen B
5. Himpunan semua elemen b yang punya pasangan di A disebut RANGE(f)
6. Notasi f(a) = b, b disebut bayangan (image) dari a
a b
f
A B
bilqis 23
f : Rn → Rm disebut transformasi dan ditulis
T : Rn → Rm
T adalah transformasi linier jika
1. T(u + v) = T(u) + T(v) penjumlahan dua vektor
2. T(cu) = cT(u) perkalian skalar dengan vektor
Catatan: u, v vektor-vektor di Ruang-n
c adalah skalar
T(u + v), T(u), T(v), T(cu), cT(u) vektor-vektor di Ruang-m
bilqis 24
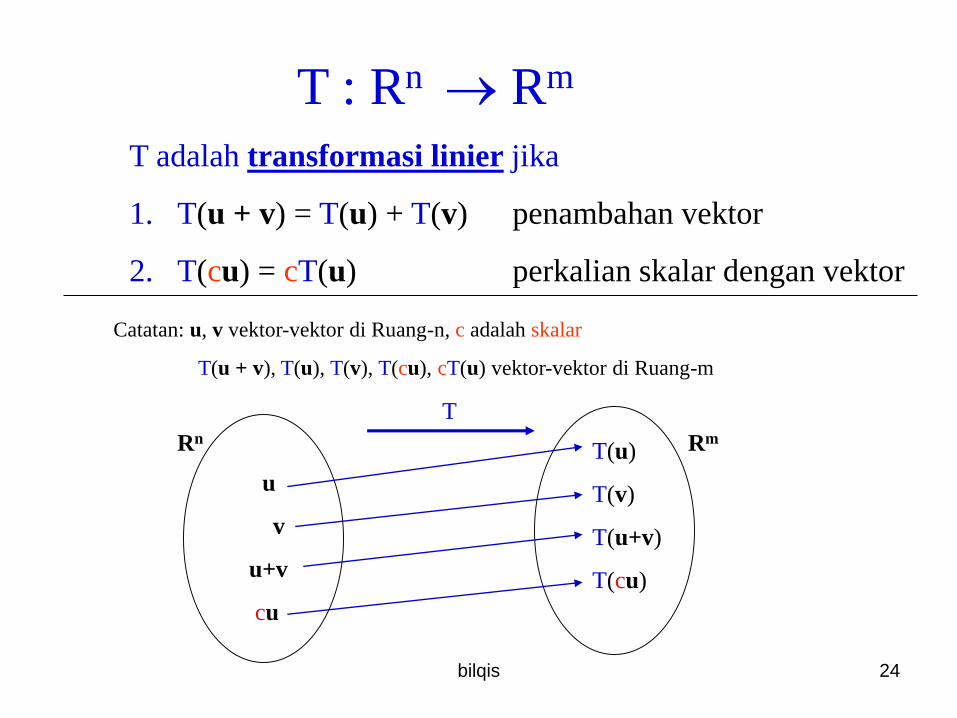
T : Rn → Rm
T adalah transformasi linier jika
1. T(u + v) = T(u) + T(v) penambahan vektor
2. T(cu) = cT(u) perkalian skalar dengan vektor
Catatan: u, v vektor-vektor di Ruang-n, c adalah skalar
T(u + v), T(u), T(v), T(cu), cT(u) vektor-vektor di Ruang-m
u
v
u+v
cu
T
T(u)
T(v)
T(u+v)
T(cu)
Rn Rm
bilqis 25
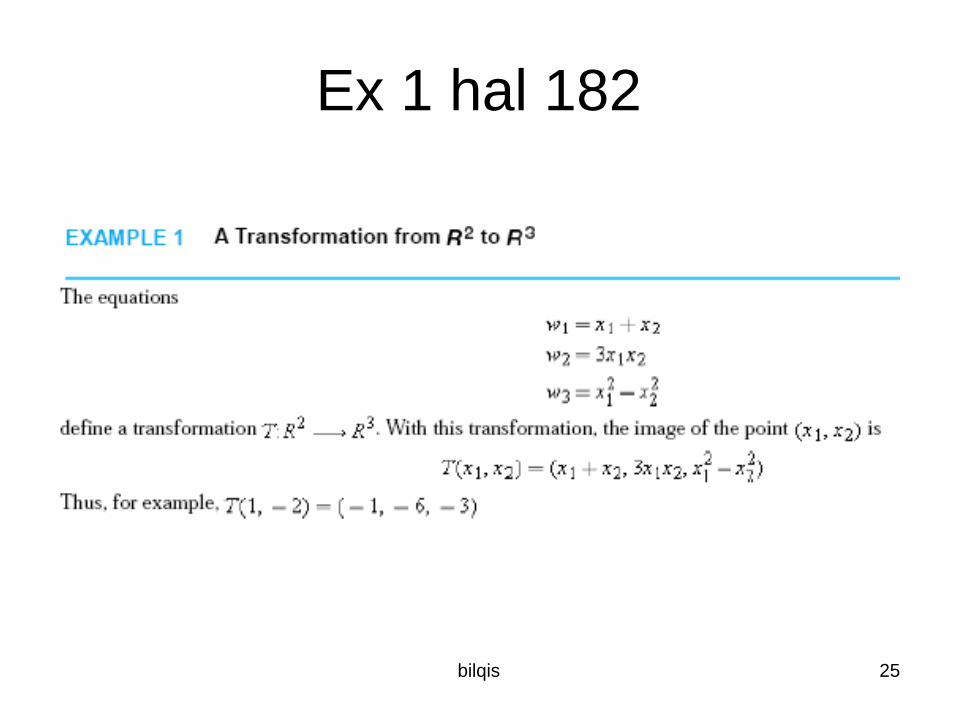
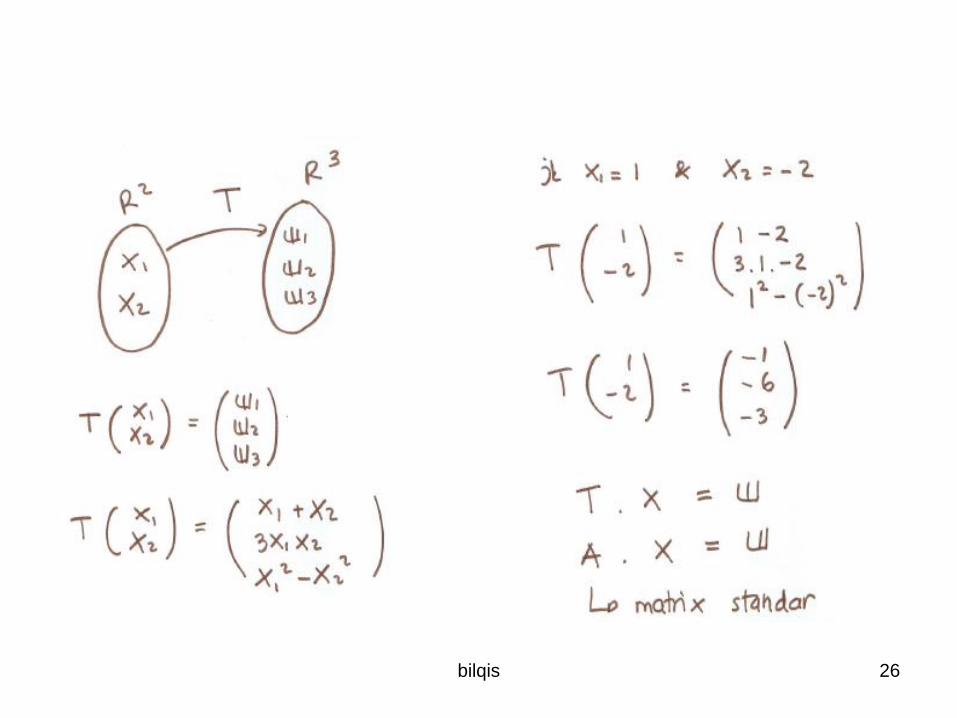
Ex 1 hal 182
bilqis 26
bilqis 27
bilqis 28
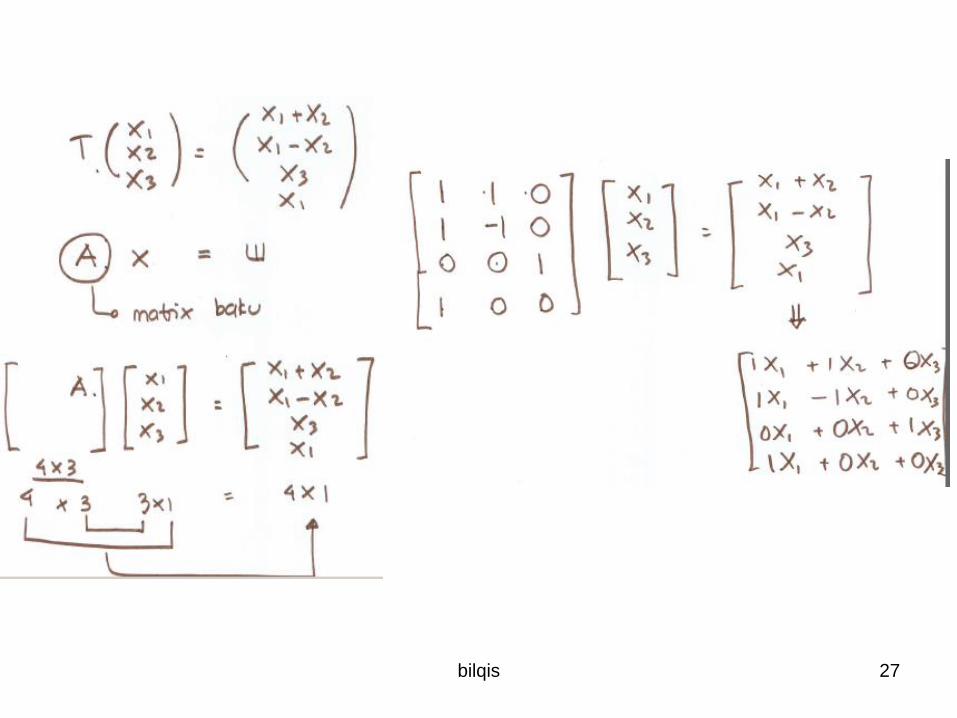
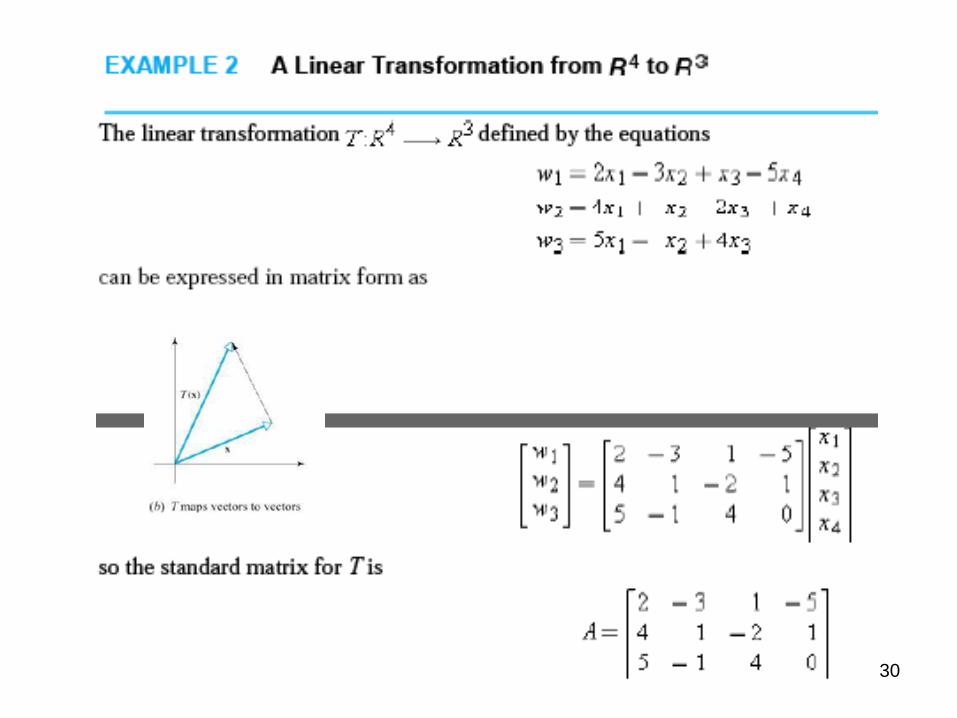
T : Rn → Rm
Transformasi T dapat “digantikan” oleh perkalian matrix
(matrix A berukuran m x n)
(x1, x2, x3, …, xn) → (w1, w2, …, wm)
jika x = (x1, x2, x2, …, xn)T dan w = (w1, w2, …, wm)T
maka transformasi dapat “digantikan” dengan
persamaan: Ax = w
di mana A disebut matriks standar untuk transformasi linier T
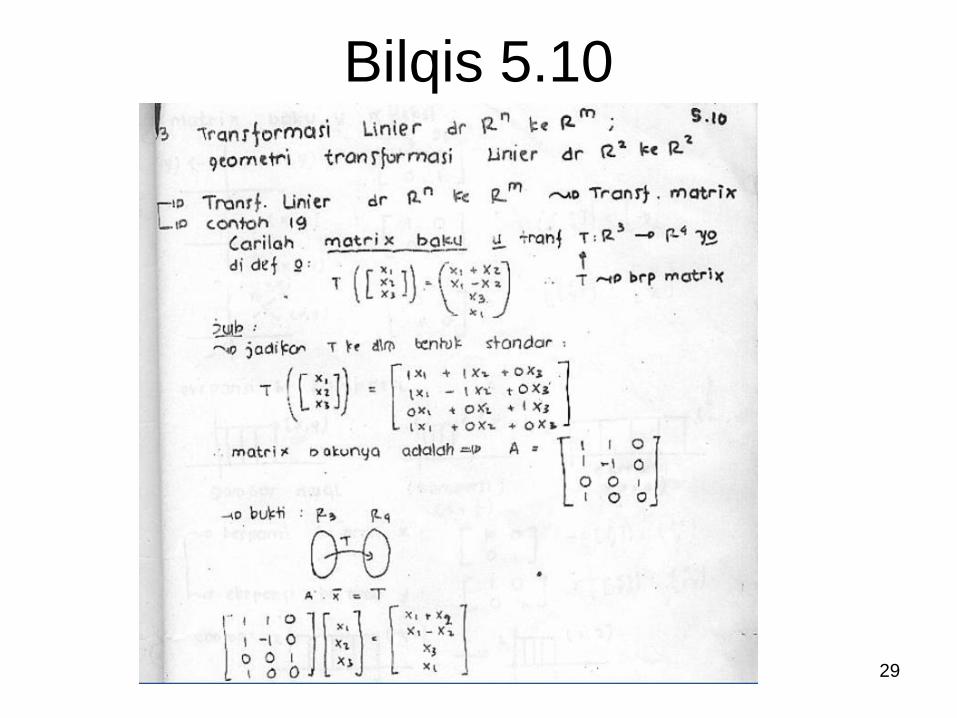
bilqis 29
Bilqis 5.10
bilqis 30

bilqis 31
bilqis 32
bilqis 33
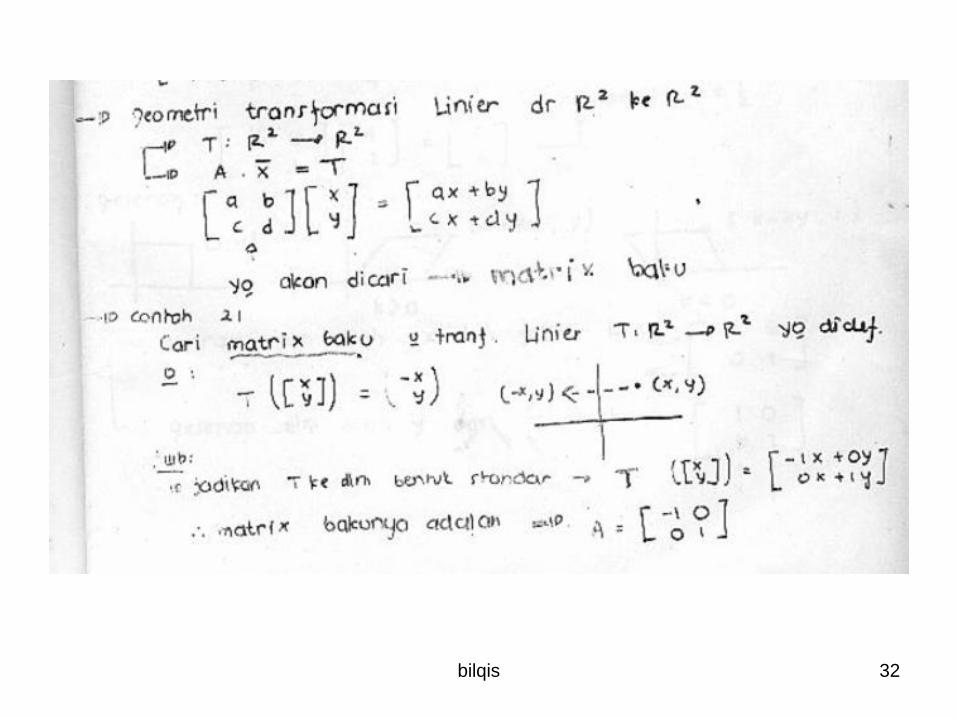
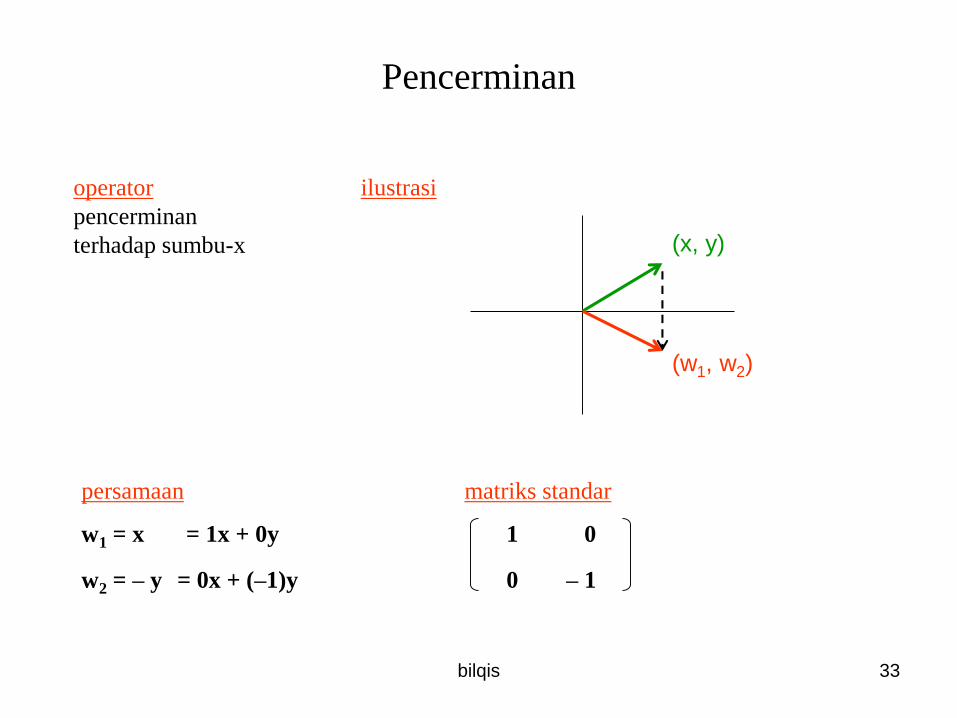
Pencerminan
operator ilustrasi
pencerminan
terhadap sumbu-x
persamaan matriks standar
w1 = x = 1x + 0y 1 0
w2 = – y = 0x + (–1)y 0 – 1
(x, y)
(w1, w2)
bilqis 34
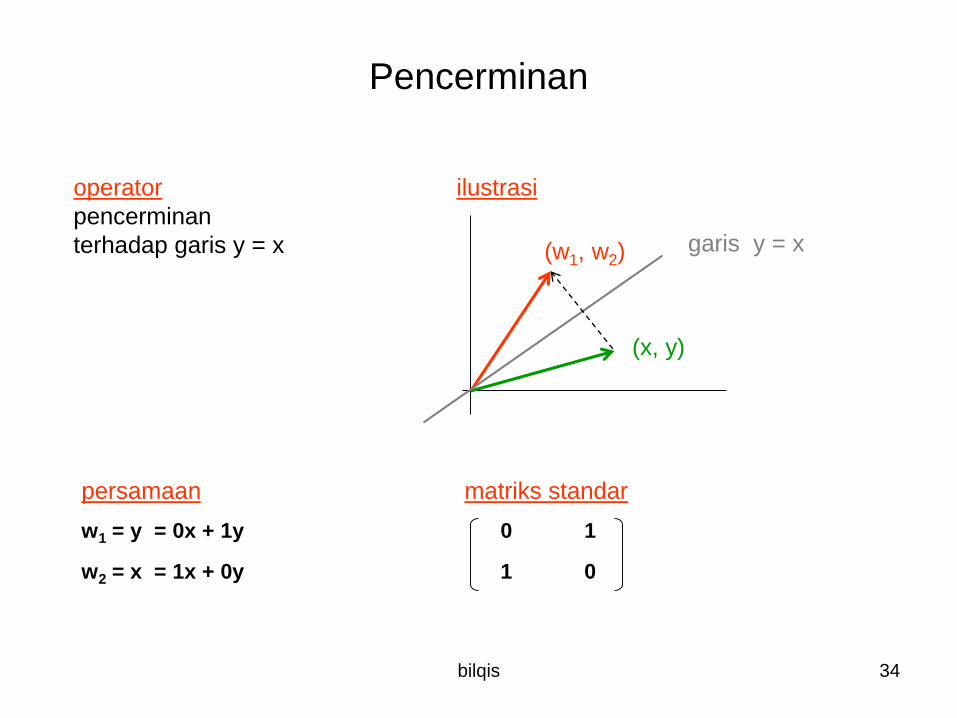
Pencerminan
operator ilustrasi
pencerminan
terhadap garis y = x
(x, y)
(w1, w2)
persamaan matriks standar
w1 = y = 0x + 1y 0 1
w2 = x = 1x + 0y 1 0
garis y = x
bilqis 35
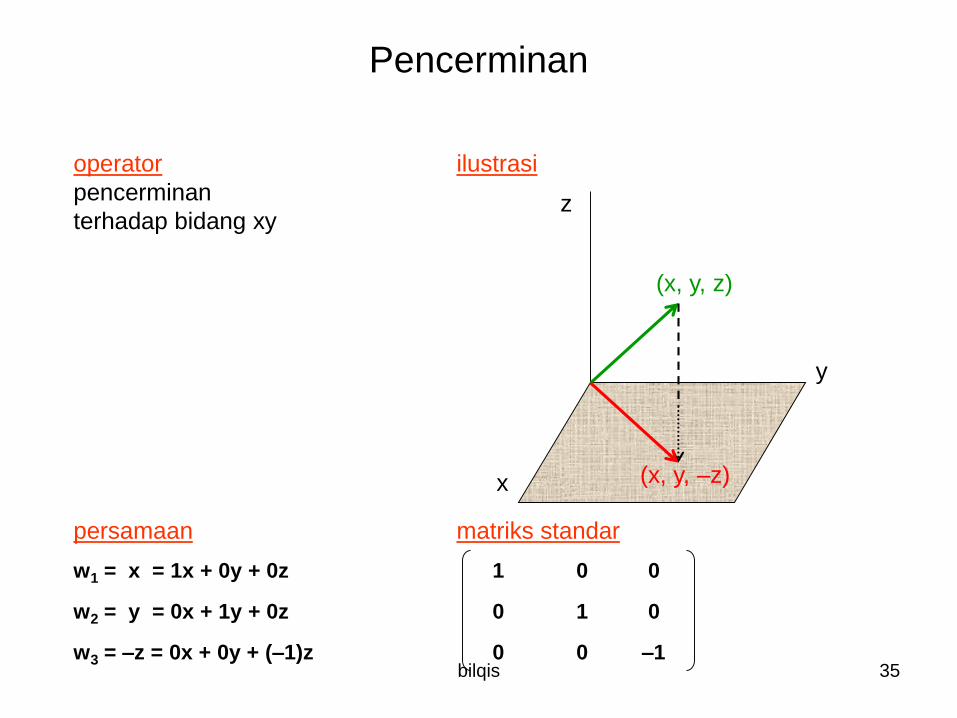
Pencerminan
operator ilustrasi
pencerminan
terhadap bidang xy
persamaan matriks standar
w1 = x = 1x + 0y + 0z 1 0 0
w2 = y = 0x + 1y + 0z 0 1 0
w3 = –z = 0x + 0y + (–1)z 0 0 –1
y
x
z
(x, y, z)
(x, y, –z)
bilqis 36
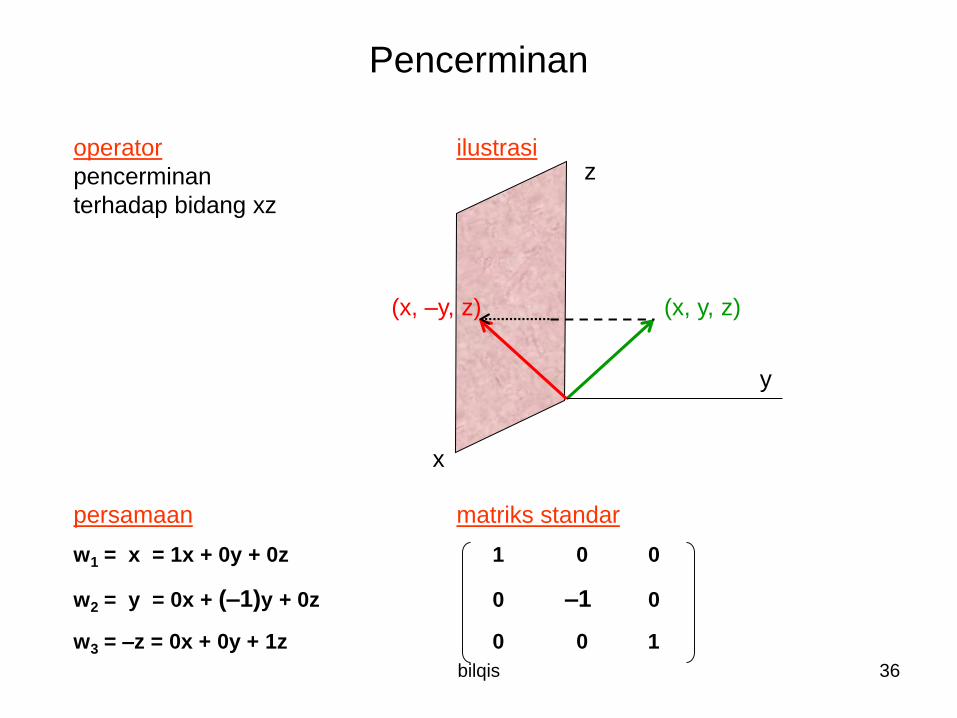
Pencerminan
operator ilustrasi
pencerminan
terhadap bidang xz
persamaan matriks standar
w1 = x = 1x + 0y + 0z 1 0 0
w2 = y = 0x + (–1)y + 0z 0 –1 0
w3 = –z = 0x + 0y + 1z 0 0 1
y
x
z
(x, y, z)(x, –y, z)
bilqis 37
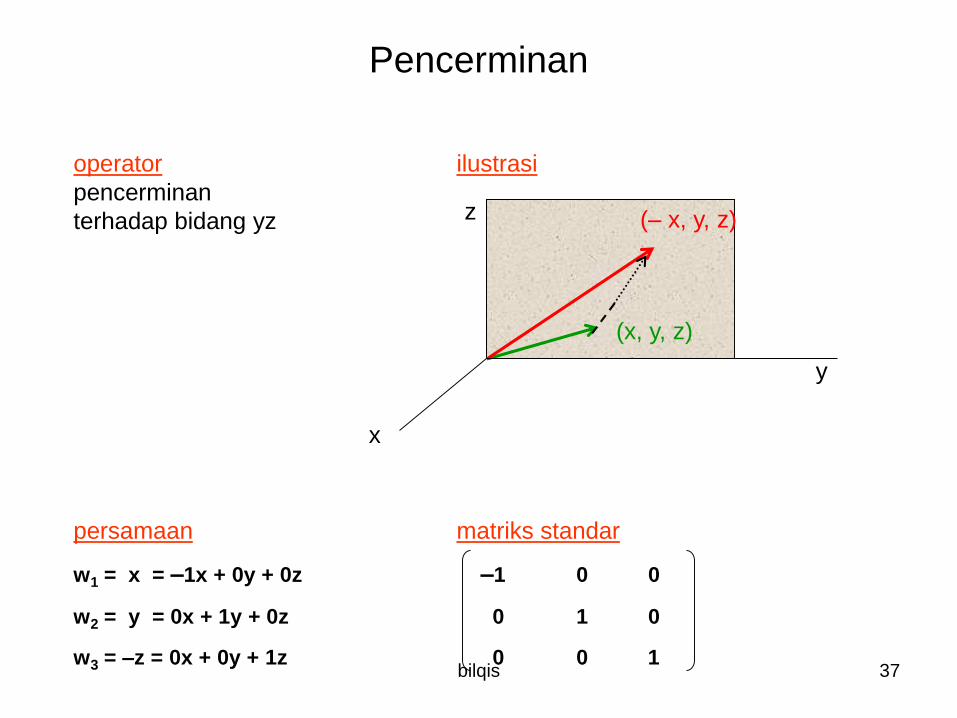
Pencerminan
operator ilustrasi
pencerminan
terhadap bidang yz
persamaan matriks standar
w1 = x = –1x + 0y + 0z –1 0 0
w2 = y = 0x + 1y + 0z 0 1 0
w3 = –z = 0x + 0y + 1z 0 0 1
y
x
z
(x, y, z)
(– x, y, z)
bilqis 38
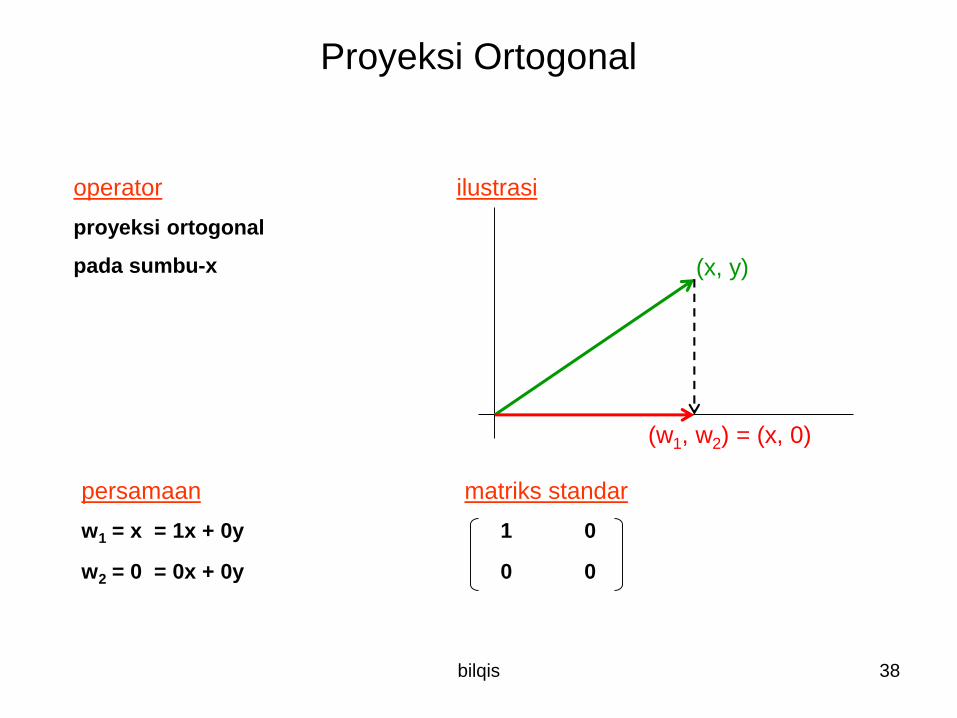
Proyeksi Ortogonal
operator ilustrasi
proyeksi ortogonal
pada sumbu-x
persamaan matriks standar
w1 = x = 1x + 0y 1 0
w2 = 0 = 0x + 0y 0 0
(x, y)
(w1, w2) = (x, 0)
bilqis 39
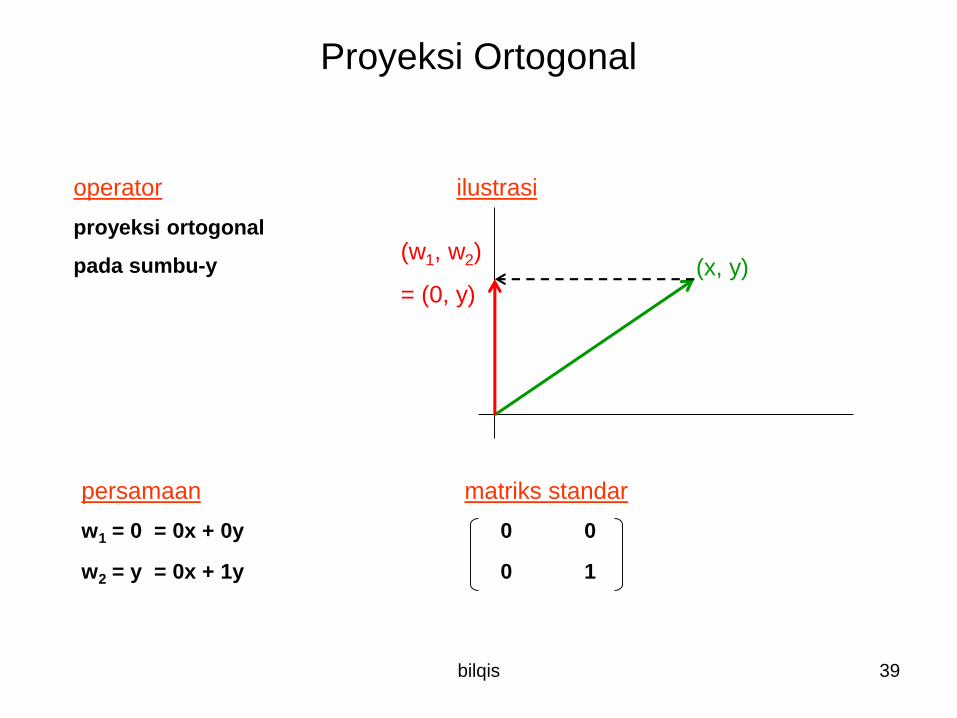
Proyeksi Ortogonal
operator ilustrasi
proyeksi ortogonal
pada sumbu-y
persamaan matriks standar
w1 = 0 = 0x + 0y 0 0
w2 = y = 0x + 1y 0 1
(x, y) (w1, w2)
= (0, y)
bilqis 40
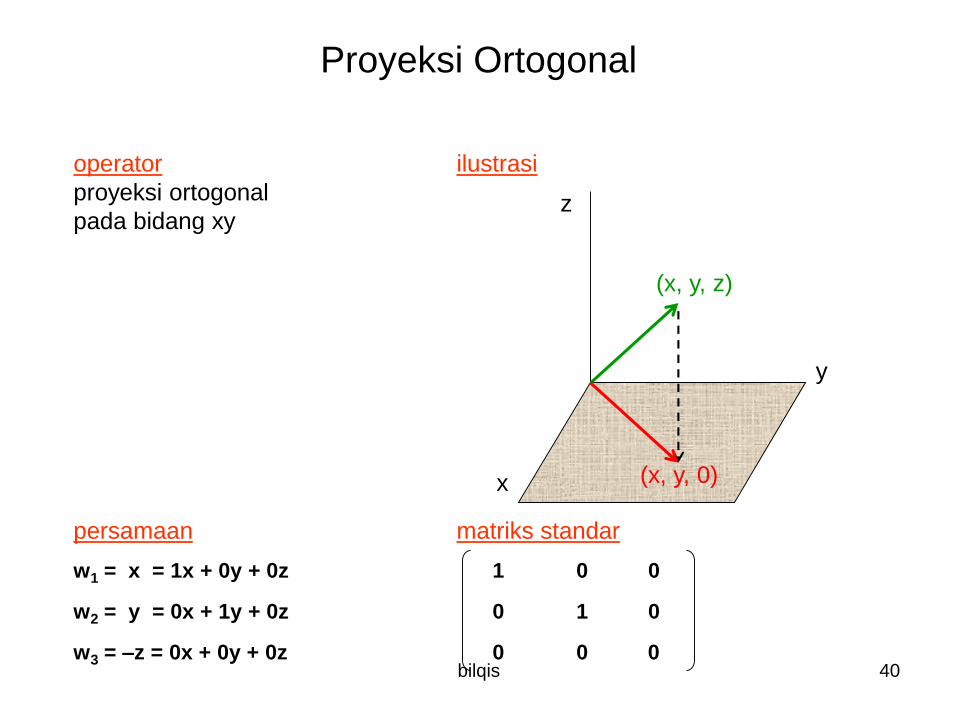
Proyeksi Ortogonal
operator ilustrasi
proyeksi ortogonal
pada bidang xy
persamaan matriks standar
w1 = x = 1x + 0y + 0z 1 0 0
w2 = y = 0x + 1y + 0z 0 1 0
w3 = –z = 0x + 0y + 0z 0 0 0
y
x
z
(x, y, z)
(x, y, 0)
bilqis 41
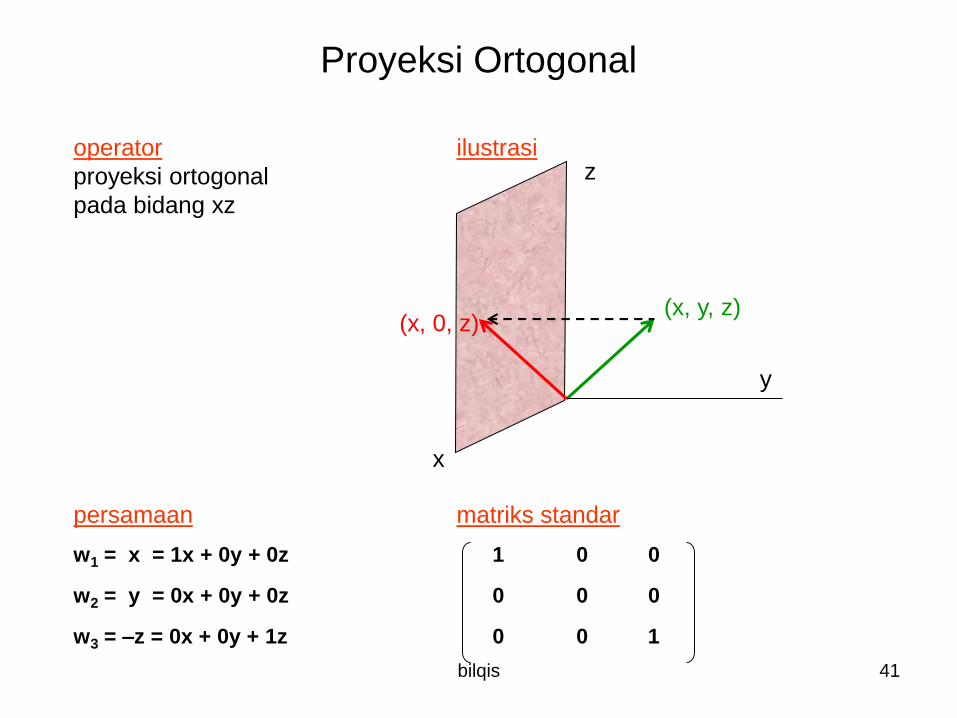
Proyeksi Ortogonal
operator ilustrasi
proyeksi ortogonal
pada bidang xz
persamaan matriks standar
w1 = x = 1x + 0y + 0z 1 0 0
w2 = y = 0x + 0y + 0z 0 0 0
w3 = –z = 0x + 0y + 1z 0 0 1
y
x
z
(x, y, z)(x, 0, z)
bilqis 42
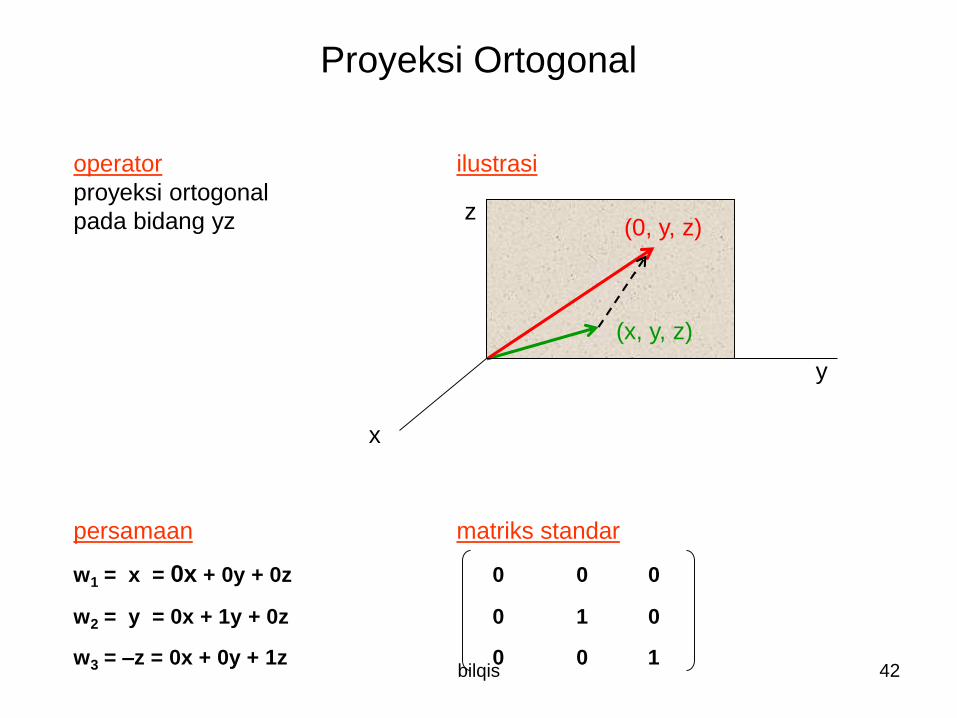
Proyeksi Ortogonal
operator ilustrasi
proyeksi ortogonal
pada bidang yz
persamaan matriks standar
w1 = x = 0x + 0y + 0z 0 0 0
w2 = y = 0x + 1y + 0z 0 1 0
w3 = –z = 0x + 0y + 1z 0 0 1
y
x
z
(x, y, z)
(0, y, z)
bilqis 43
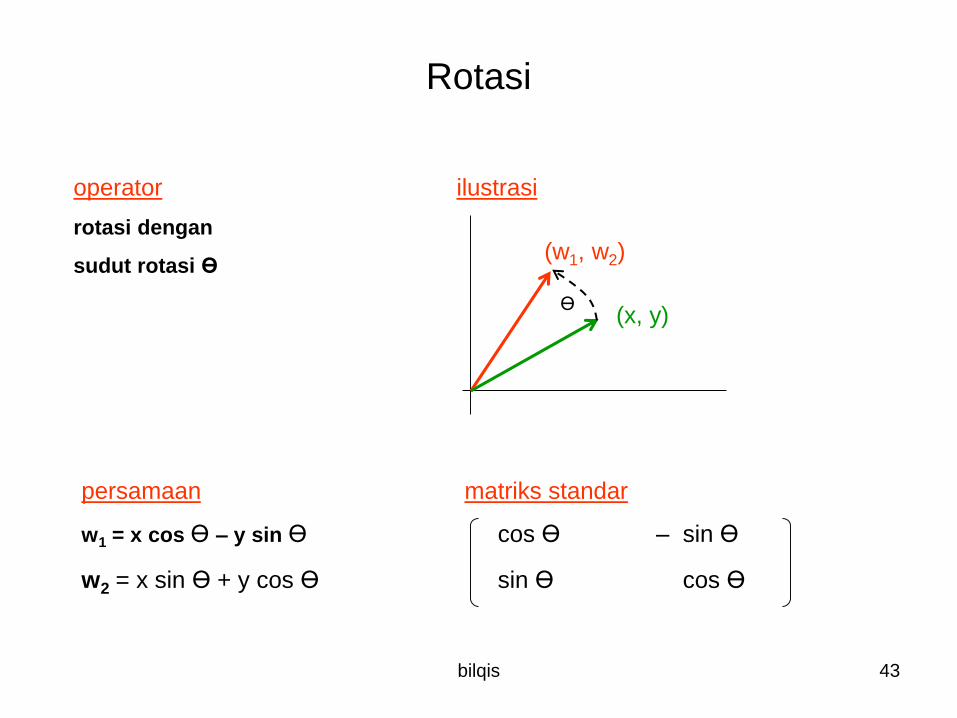
Rotasi
operator ilustrasi
rotasi dengan
sudut rotasi Ө
persamaan matriks standar
w1 = x cos Ө – y sin Ө cos Ө – sin Ө
w2 = x sin Ө + y cos Ө sin Ө cos Ө
Ө(x, y)
(w1, w2)
bilqis 44
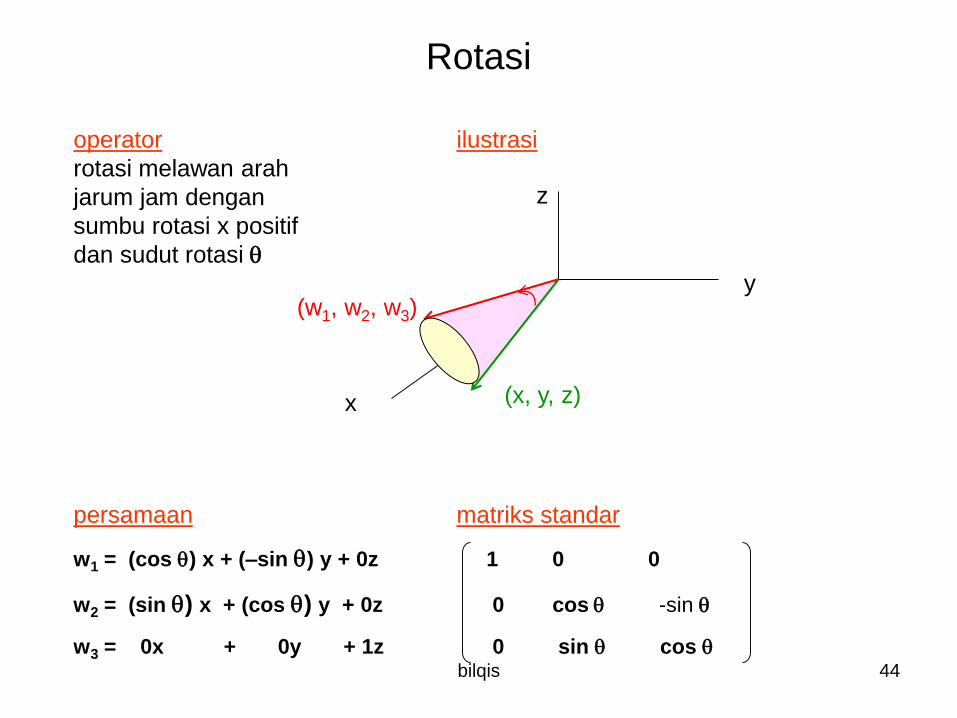
Rotasi
operator ilustrasi
rotasi melawan arah
jarum jam dengan
sumbu rotasi x positif
dan sudut rotasi
persamaan matriks standar
w1 = (cos ) x + (–sin ) y + 0z 1 0 0
w2 = (sin ) x + (cos ) y + 0z 0 cos -sin
w3 = 0x + 0y + 1z 0 sin cos
x
z
y(w1, w2, w3)
(x, y, z)
bilqis 45
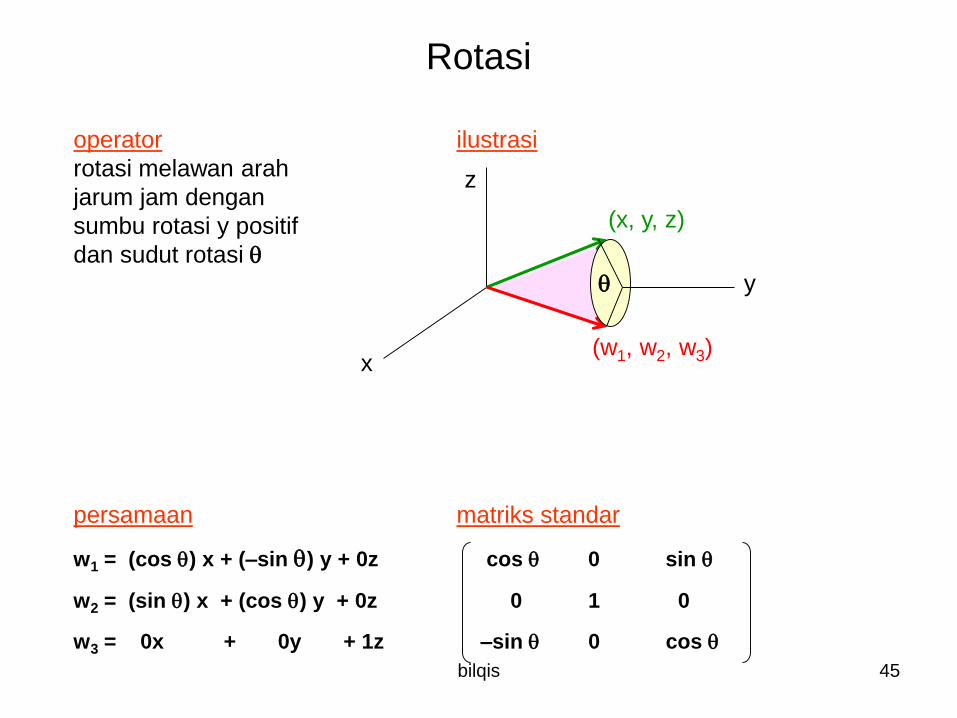
Rotasi
operator ilustrasi
rotasi melawan arah
jarum jam dengan
sumbu rotasi y positif
dan sudut rotasi
persamaan matriks standar
w1 = (cos ) x + (–sin ) y + 0z cos 0 sin
w2 = (sin ) x + (cos ) y + 0z 0 1 0
w3 = 0x + 0y + 1z –sin 0 cos
x
z
y
(w1, w2, w3)
(x, y, z)
bilqis 46
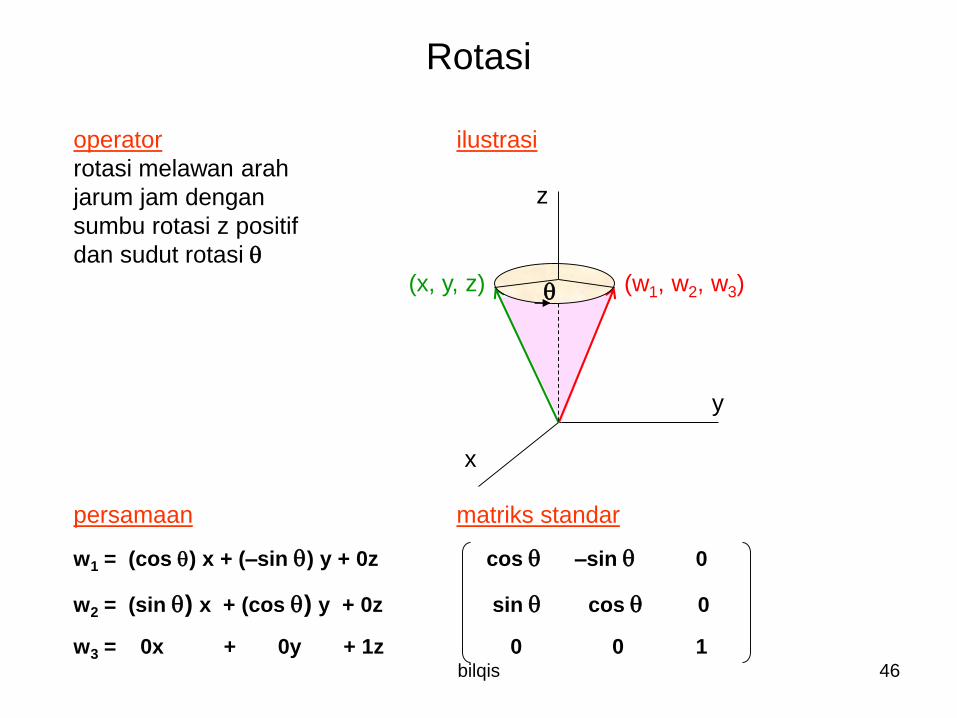
Rotasi
operator ilustrasi
rotasi melawan arah
jarum jam dengan
sumbu rotasi z positif
dan sudut rotasi
persamaan matriks standar
w1 = (cos ) x + (–sin ) y + 0z cos –sin 0
w2 = (sin ) x + (cos ) y + 0z sin cos 0
w3 = 0x + 0y + 1z 0 0 1
x
z
y
(w1, w2, w3)(x, y, z)
bilqis 47
bilqis 48
bilqis 49
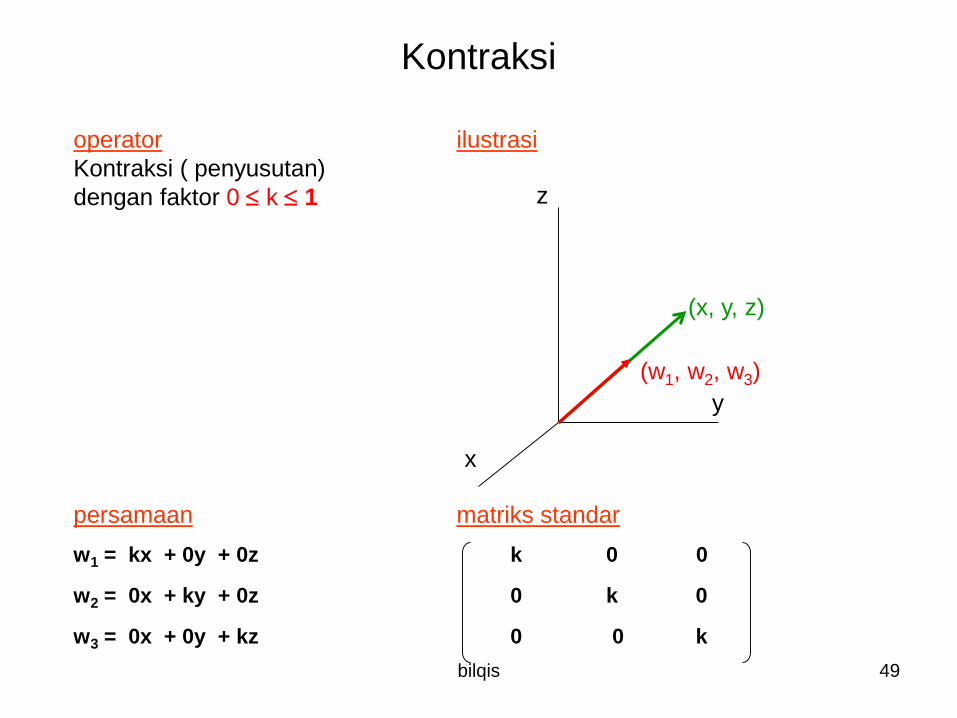
Kontraksi
operator ilustrasi
Kontraksi ( penyusutan)
dengan faktor 0 k 1
persamaan matriks standar
w1 = kx + 0y + 0z k 0 0
w2 = 0x + ky + 0z 0 k 0
w3 = 0x + 0y + kz 0 0 k
x
z
y
(w1, w2, w3)
(x, y, z)
bilqis 50
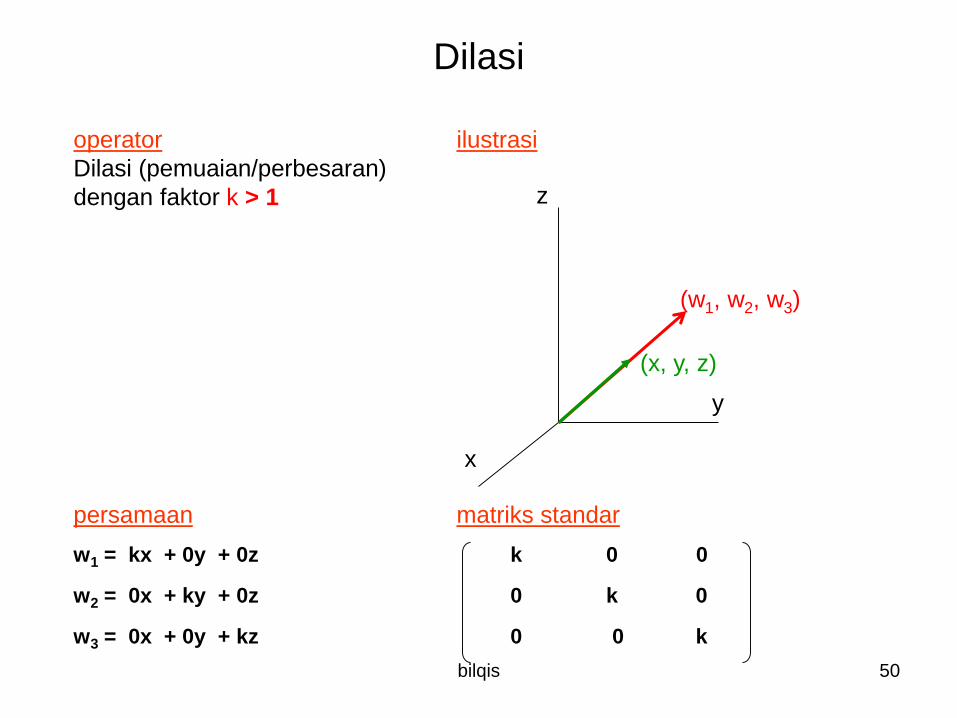
Dilasi
operator ilustrasi
Dilasi (pemuaian/perbesaran)
dengan faktor k > 1
persamaan matriks standar
w1 = kx + 0y + 0z k 0 0
w2 = 0x + ky + 0z 0 k 0
w3 = 0x + 0y + kz 0 0 k
x
z
y
(w1, w2, w3)
(x, y, z)
bilqis 51

bilqis 52
bilqis 53
bilqis 54
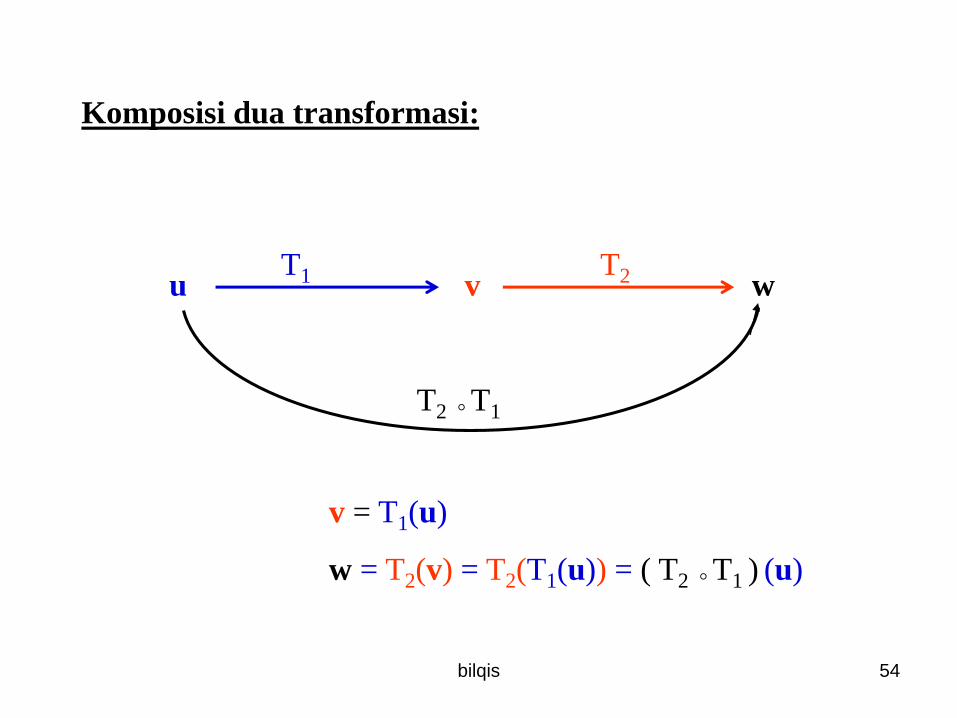
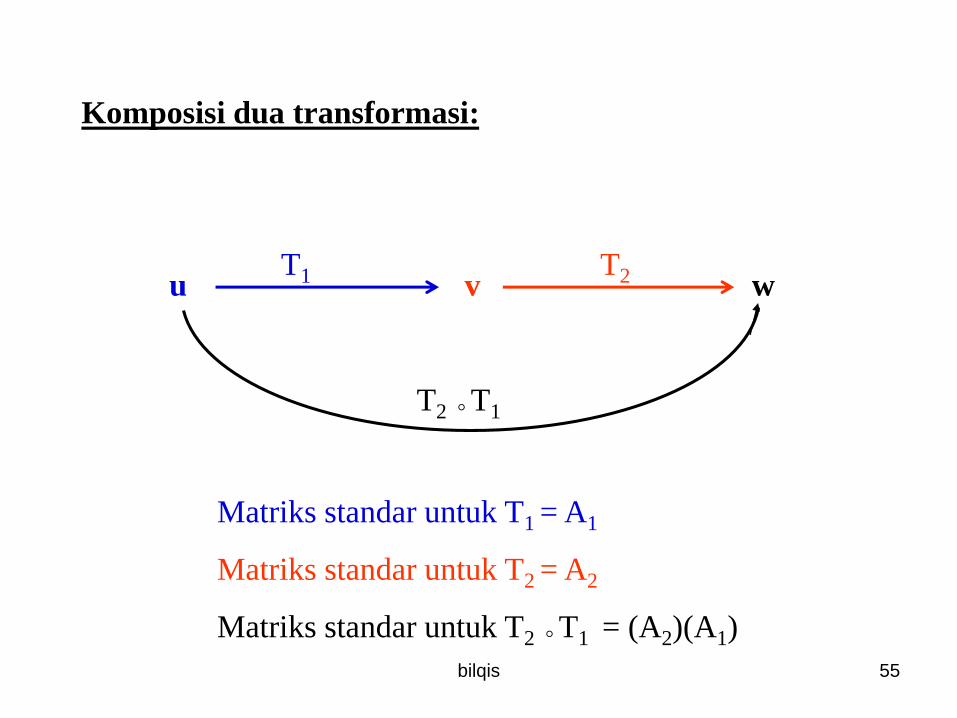
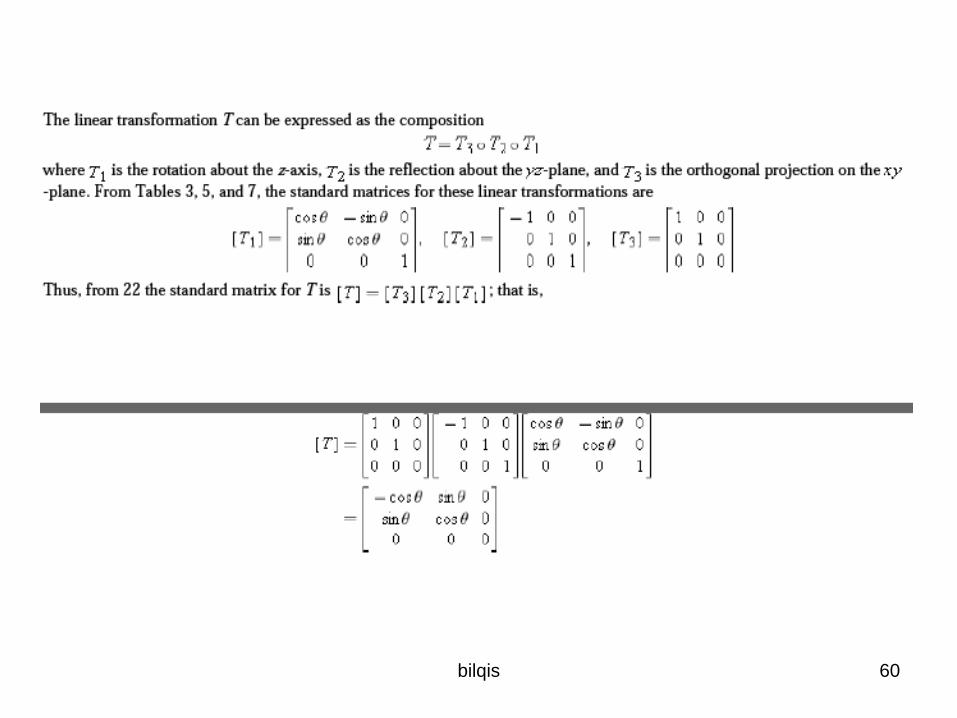
Komposisi dua transformasi:
u v wT1 T2
T2 ° T1
v = T1(u)
w = T2(v) = T2(T1(u)) = ( T2 ° T1 ) (u)
bilqis 55
Komposisi dua transformasi:
u v wT1 T2
T2 ° T1
Matriks standar untuk T1 = A1
Matriks standar untuk T2 = A2
Matriks standar untuk T2 ° T1 = (A2)(A1)
bilqis 56
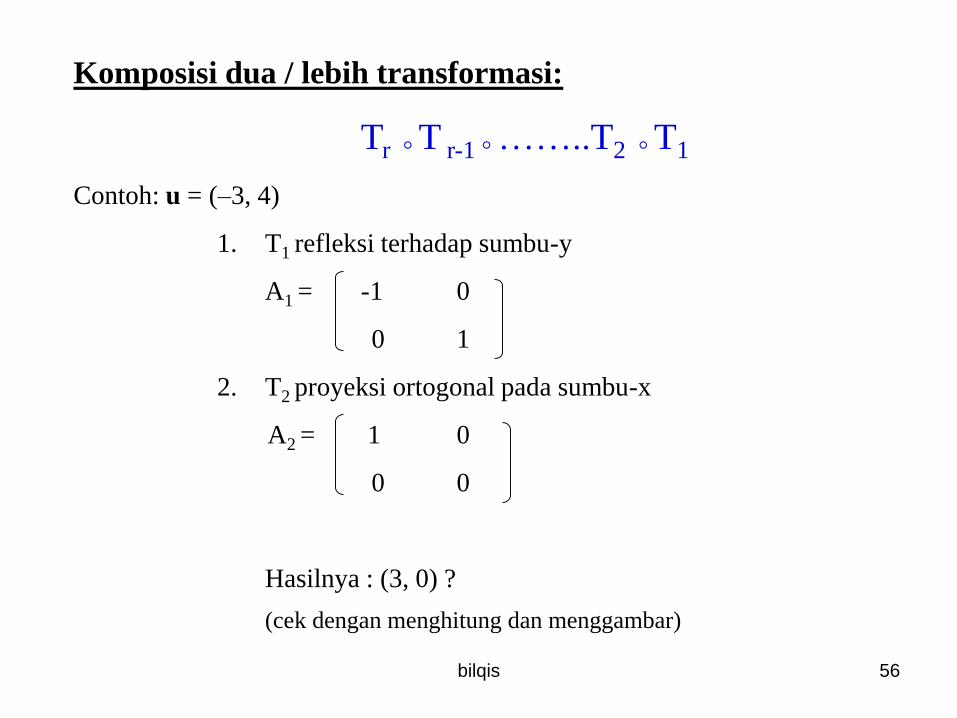
Komposisi dua / lebih transformasi:
Tr ° T r-1 ° ……..T2 ° T1
Contoh: u = (–3, 4)
1. T1 refleksi terhadap sumbu-y
A1 = -1 0
0 1
2. T2 proyeksi ortogonal pada sumbu-x
A2 = 1 0
0 0
Hasilnya : (3, 0) ?
(cek dengan menghitung dan menggambar)
bilqis 57
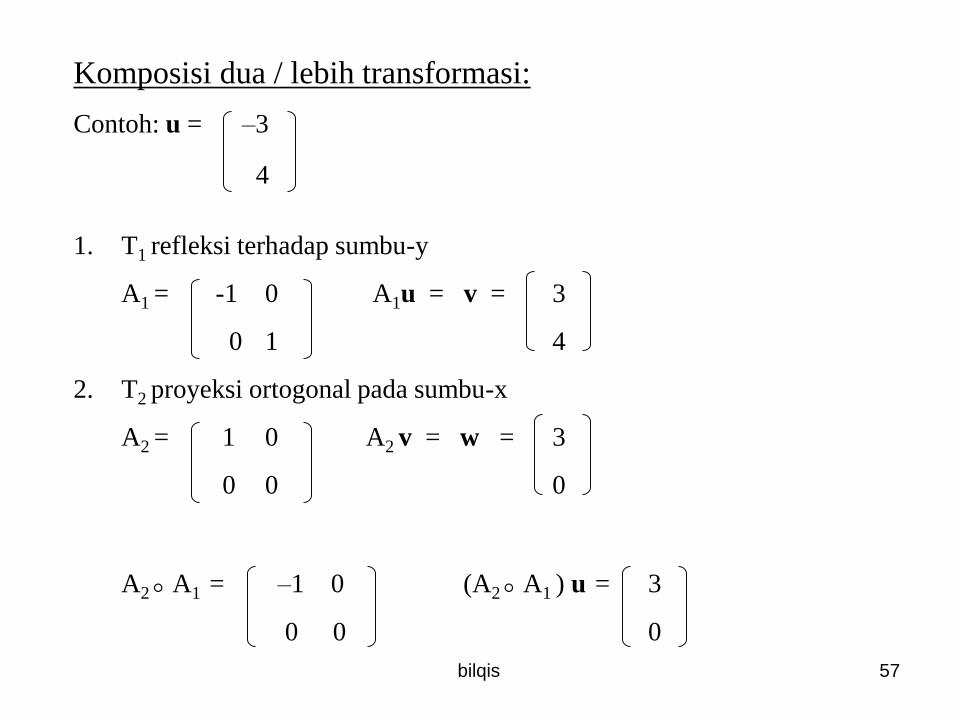
Komposisi dua / lebih transformasi:
Contoh: u = –3
4
1. T1 refleksi terhadap sumbu-y
A1 = -1 0 A1u = v = 3
0 1 4
2. T2 proyeksi ortogonal pada sumbu-x
A2 = 1 0 A2 v = w = 3
0 0 0
A2 A1 = –1 0 (A2 A1 ) u = 3
0 0 0

bilqis 58
bilqis 59
bilqis 60
bilqis 61
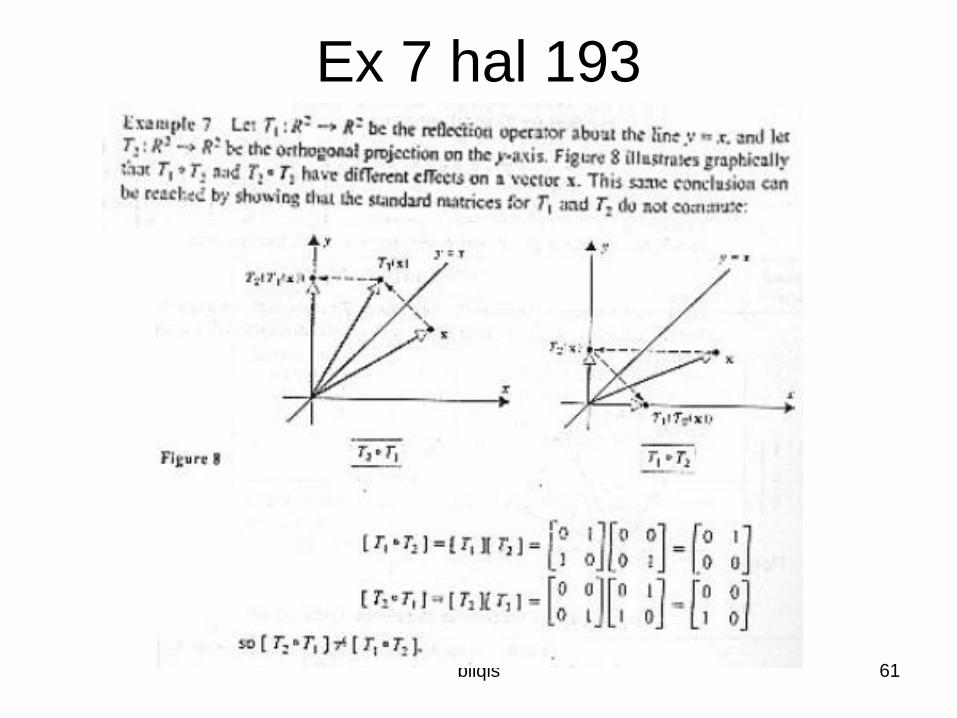
Ex 7 hal 193
bilqis 62
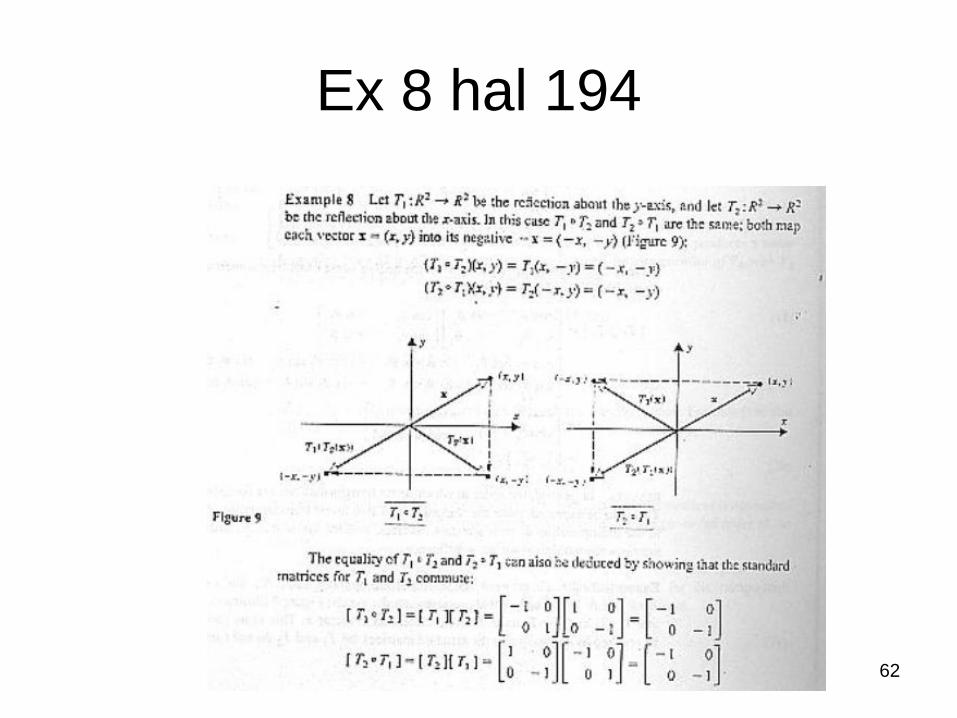
Ex 8 hal 194
bilqis 63
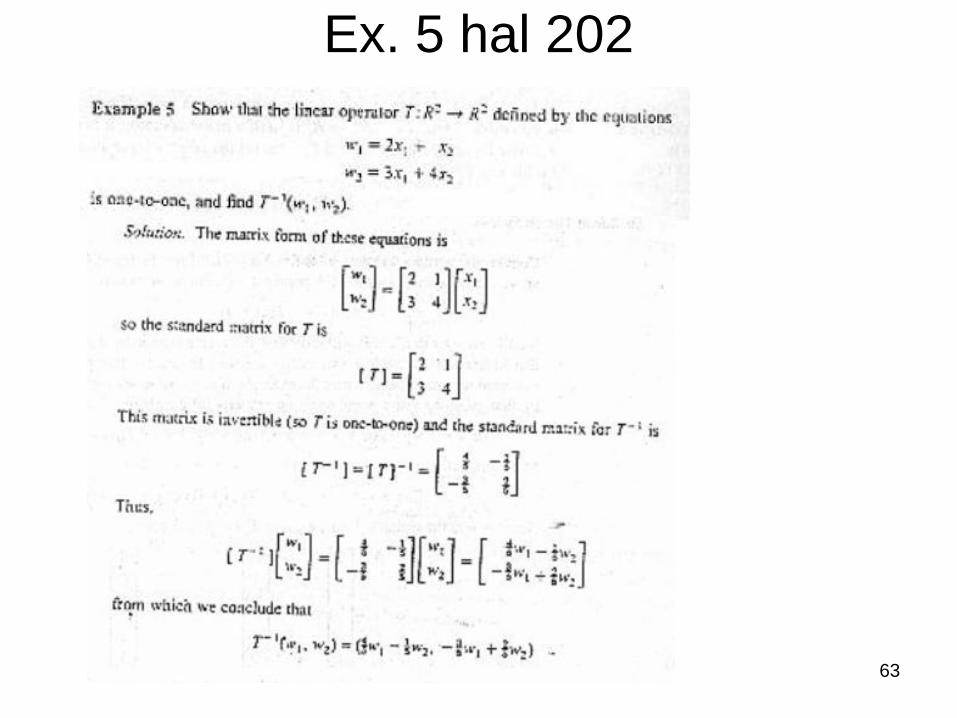
Ex. 5 hal 202
Contoh Soal No. 1
• Carilah koordinat akhir dari (-3, 5) jika pertama kali di
dilakukan dilatasi sebesar k =3, kemudian dicerminkan
terhadap garis x = y, dilanjutkan dengan pencerminan
terhadap sumbu x, kemudian proyeksi ortogonal
terhadap sumbu y dan terakhir dilakukan rotasi sebesar
300 (sin 30 = 0,5 dan cos 30 = 0,87)
• Pertama,
– Lakukan step by step perkalian titik dengan matrix,
– titik hasilnya, dikalikan dengan matrix lagi,
– begitu seterusnya, hingga akhir
bilqis 64
bilqis 65
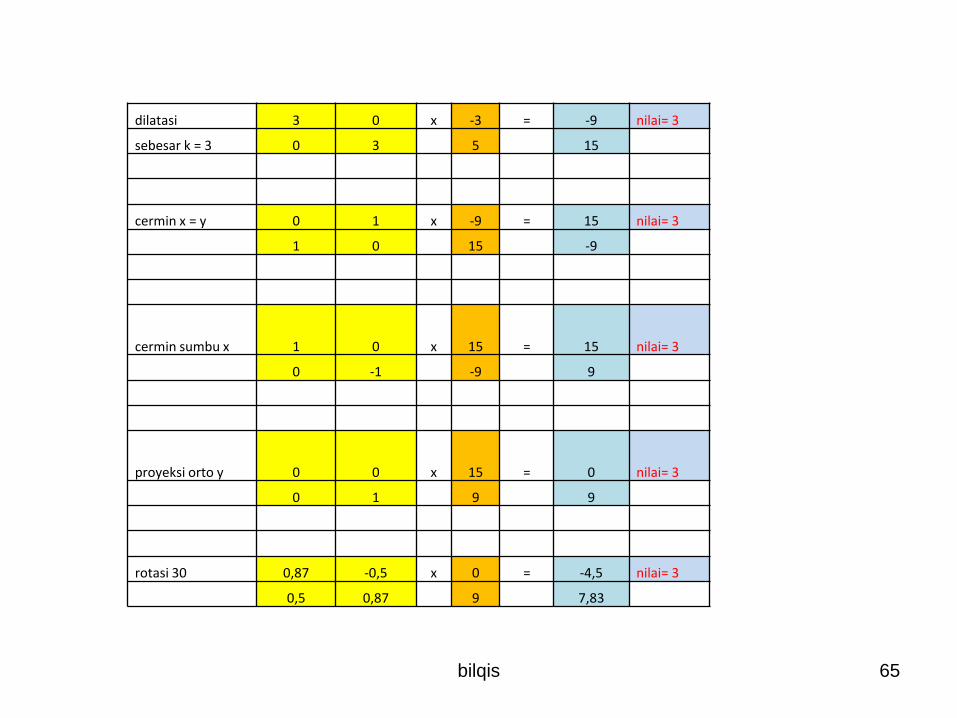
dilatasi 3 0 x -3 = -9 nilai= 3
sebesar k = 3 0 3 5 15
cermin x = y 0 1 x -9 = 15 nilai= 3
1 0 15 -9
cermin sumbu x 1 0 x 15 = 15 nilai= 3
0 -1 -9 9
proyeksi orto y 0 0 x 15 = 0 nilai= 3
0 1 9 9
rotasi 30 0,87 -0,5 x 0 = -4,5 nilai= 3
0,5 0,87 9 7,83
• kedua,
– lakukan step by step dengan menggunakan
perkalian matrix dengan matrix,
– matrix hasil, dengan matrix berikutnya,
– begitu seterusnya hingga matrix terakhir
dikalikan dengan titik awal
bilqis 66
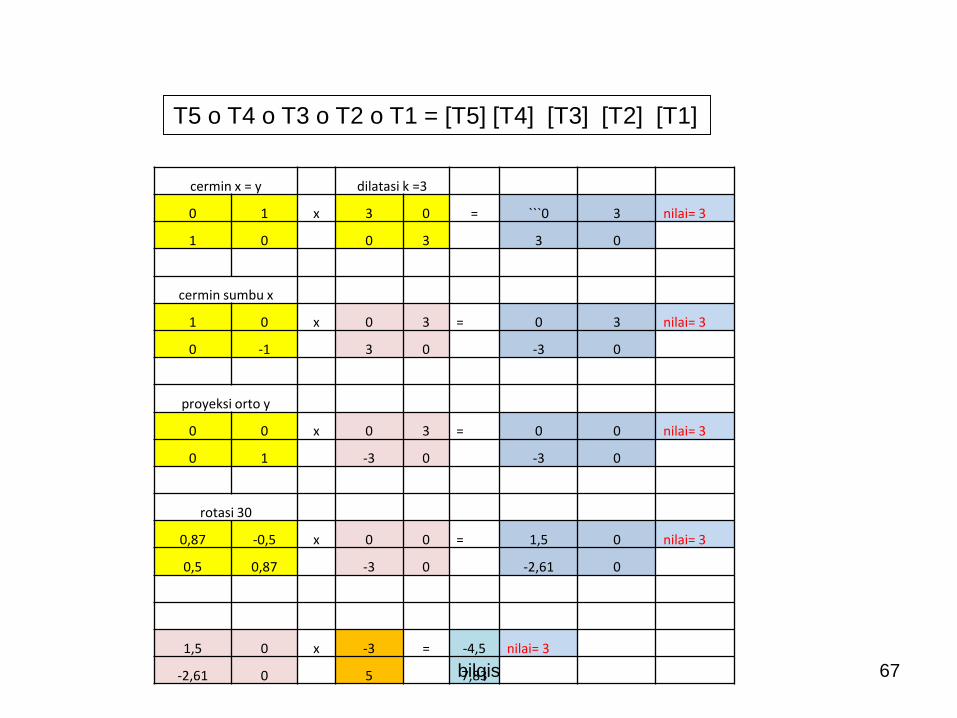
cermin x = y dilatasi k =3
0 1 x 3 0 = ```0 3 nilai= 3
1 0 0 3 3 0
cermin sumbu x
1 0 x 0 3 = 0 3 nilai= 3
0 -1 3 0 -3 0
proyeksi orto y
0 0 x 0 3 = 0 0 nilai= 3
0 1 -3 0 -3 0
rotasi 30
0,87 -0,5 x 0 0 = 1,5 0 nilai= 3
0,5 0,87 -3 0 -2,61 0
1,5 0 x -3 = -4,5 nilai= 3
-2,61 0 5 7,83bilqis 67
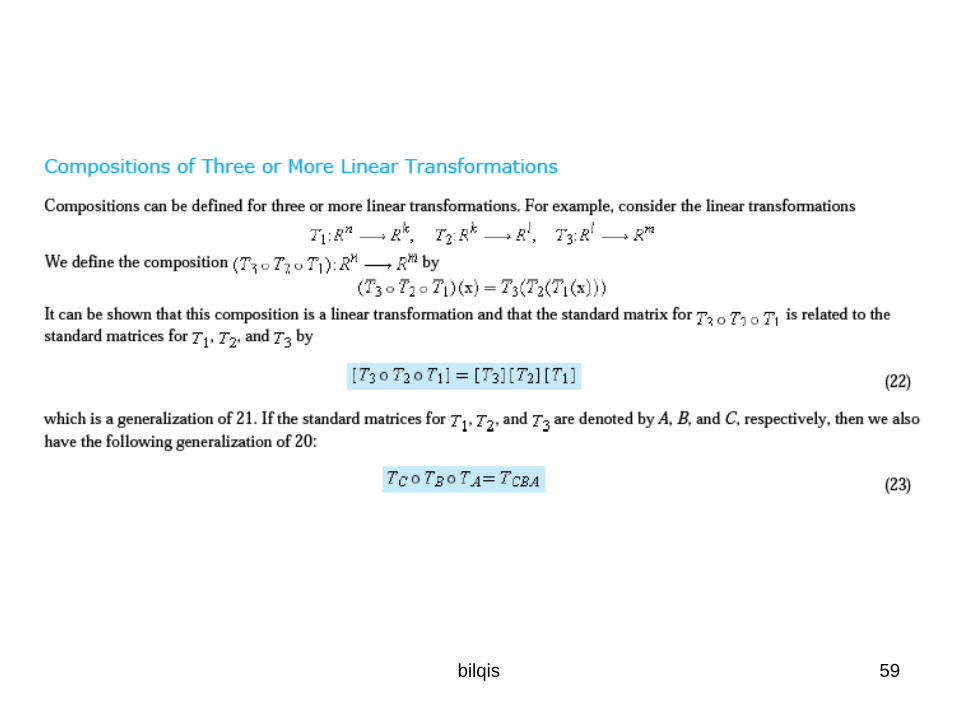
T5 o T4 o T3 o T2 o T1 = [T5] [T4] [T3] [T2] [T1]
• Tugas Kelompok ➔
– cari 2 soal dan jawaban di internet yang
berhubungan dengan materi ppt ini
– Tulis alamat internetnya
– Di kirim ke elearning, terakhir ➔
• Minggu depan
• Format ➔ subject ➔
– Alin-B-melati
– Bentuk ➔ ppt ➔ informasi nama kelompok
+ anggota
bilqis 68