pengembangan modulasi lebar pulsa dijital untuk …biofarmaka.ipb.ac.id/biofarmaka/2013/pirs 2012 -...
TRANSCRIPT

TR-16 0030: M.A. Purwoadi dkk.
PENGEMBANGAN MODULASI LEBAR PULSA DIJITAL UNTUK SISTIMKENDALI PROPULSI KERETA KRDE/KRL
Michael Andreas Purwoadi1,∗, Iyan Turyana 2), Siswayudi Azhari2, Taufik Nashrullah2,Dito Eka Cahya1, Heru Taufiquorrahman1, Junanto1, Arga Lazuardi1, dan Riza2
1Balai Mesin Perkakas, Teknik Produksi dan Otomasi (MEPPO)2Pusat Teknologi Informasi dan Komunikasi (PTIK)
3Pusat Teknologi Konservasi dan Konversi Energi (PTKKE)Badan Pengkajian dan Penerapan Teknologi (BPPT)
Gd.Teknologi-2, Gedung 251, Puspiptek Serpong∗e-Mail: [email protected]
Disajikan 29-30 Nop 2012
ABSTRAK
Kereta Rel Disel-Elektrik (KRDE) dan Kereta Rel Listrik (KRL) diproyeksikan menjadi tulang punggung sarana trans-portasi masal cepat (Mass Rapid Transportation/MRT) di daerah perkotaan. Sistim kendali propulsi KRL/KRDE adalah bagiandari teknologi yang harus selalu disesuaikan dengan trajek operasi kereta sehingga kemandirian terhadap teknologinya akan sa-ngat penting guna kelancaran dan efisiensi biaya operasional. Dalam makalah ini disampaikan pengembangan generator PWMdijital yang akan meningkatkan reliabilitas dan kemudahan operasinya. Generator PWM terdiri dari counter dan dua match-register yang dibandingkan nilainya untuk menetapkan saat turn-on dan turn-off relay semikonduktor pada inverter. Keluarandari komparator dimasukkan ke dalam sirkit interlock untuk menghindari terjadinya hubungan pendek. Sirkit ini berfungsidengan baik saat diuji dengan menggunakan strategi space-vector PWM dan saat diuji dengan electromagnetic immunity test.
Kata Kunci: Modulasi lebar pulsa dijital, propulsi, space-vector, inverter
I. PENDAHULUANKereta Rel Disel Elektrik (KRDE) dan Kereta Rel
Listrik (KRL) merupakan 2 tipe kereta yang diha-rapkan akan menjadi tulang punggung transportasidaerah perkotaan (urban). Dengan moda tranpor-tasi masal cepat ini (Mass Rapid Transportation) di-harapkan penggunaan kendaraan pribadi dapat diku-rangi dan kemacetan di jalan yang memboroskanenergi serta uang dapat dikurangi. Walaupun seba-gian besar KRL masih diimpor dari Jepang, indus-tri nasional sebenarnya telah mampu memproduksiKRDE maupun KRL sendiri. Mereka mampu mendi-sain dan memproduksi bagian mekanik seperti bo-gie, kabin penumpang serta mendisain serta mengin-tegrasikan sistim kelistrikan seperti penyejuk udara,lampu, propulsi. Akan tetapi, tingkat kandungandalam negeri (TKDN) hanya berkisar 35-40% karenaternyata 60% harga kereta adalah harga sistim propulsitermasuk sistim kendalinya yang sebagian besar masihdiimpor. Sistim kendali KRDE maupun KRL, yang har-ganya mencapai 6% dari harga kereta, harus dikon-figurasi sesuai dengan trayek operasinya. Konfigurasi
sistim kendali propulsi untuk melayani rute Jakarta– Depok – Bogor yang jarak antar stasiun lebih pen-dek, akan berbeda dengan konfigurasi sistim kendaliuntuk melayani Jakarta – Bekasi, atau Jakarta – Ser-pong. Untuk kemudahan operasi maka diinginkanbahwa konfigurasi sistim kendali ini dapat dilakukanoleh teknisi Indonesia sendiri sehingga akan lebih cepatdan lebih murah daripada mendatangkan teknisi asingdari pabrik pembuat sistim propulsi. Program yangdibiayai Kementrian Riset dan Teknologi ini bertujuanmengembangkan sistim kendali tersebut di atas agardapat diproduksi di Indonesia dan, dengan demikian,dapat dikonfigurasi oleh teknisi Indonesia seperti ke-inginan industri kereta maupun operator kereta di atas.
Makalah ini akan menjelaskan seba-gian dari sis-tim kendali tersebut yakni bagian generator modulasilebar pulsa (PWM generator) yang dibuat seluruhnyadijital sehingga akan lebih tahan terhadap gangguangelombang elektromaknetik yang dihasilkan oleh in-verter kereta itu sendiri. Strategi space-vector PWM di-gunakan untuk mendapatkan tegangan motor induksilebih tinggi dibandingkan strategi PWM lainnya dari
Prosiding InSINas 2012

0030: M.A. Purwoadi dkk. TR-17
tegangan DC-Link yang sama.
II. METODOLOGIA. Arsitektur Umum Sistim Propulsi
Secara garis besar, arsitektur sistim propulsiKRDE/KRL adalah seperti terlihat dalam GAMBAR 1.
GAMBAR 1: Arsitektur sistim propulsi
TECU berfungsi sebagai koordinator antara semuaperalatan elektronika daya dalam sistim propulsi. De-ngan masukkan torsi yang diinginkan oleh masinis,TECU akan memerintahkan terlebih dahulu engine-alternator untuk menaikkan terlebih dahulu kapasitasproduksi energinya sebelum memerin-tahkan motorinduksi untuk menaikkan torsinya seperti keinginanmasinis.
TCU adalah pengendali torsi motor dengan ma-sukkan torsi motor yang dikehendaki dan state-variables sistim propulsi yakni arus motor (Is), kece-patan putar motor (wm), tegangan DC-Link (Vdc-link)sedangkan keluarannya adalah sinyal PWM yang akanmenentukan kondisi konduksi setiap relay semikon-duktor inverter.
GAMBAR 2: Arsitektur TCU
Masukkan PWM generator adalah tegangan statormotor induksi yang diinginkan dihasilkan oleh inverter.
Metoda pembuatan sinyal PWM yang klasik digu-nakan adalah dengan membandingkan sinyal analokreferen-si dengan sinyal analok segitiga seperti terlihat
pada GAMBAR 3. Dengan skema tersebut maka tegan-gan rata-rata < U > dapat dituliskan sebagai berikut:
< U >=t2 − t1T
E =E
MAXref (1)
di mana :t1 adalah saat di mana T2 turn-ont1 adalah saat di mana T2 turn-offT adalah perioda komutasiref adalah tegangan referensiMAX adalah tegangan maksimum sinyal segitigaE adalah tegangan DC-Link
GAMBAR 3: Generator PWM klasik
Dengan strategi di atas, maka tegangan rata-ratapada beban < U > akan proporsional dengan teganganref. Demikianlah maka tegangan rata-rata antar fasamotor induksi setiap 1 perioda komutasi dapat diatursesuai dengan besarnya nilai ref (Usref) yang dihasilkanoleh algoritma kendali melalui kombinasi status kon-duksi atau tidak-konduksi relay semikonduktor T1 danT2. Untuk KRDE/KRL biasanya digunakan InsulatedGate Bipolar Transistor (IGBT) sebagai relay semikon-duktor.
Dalam skema di atas terlihat bahwa yang terpentingadalah penentuan waktu t1 dan t2.
B. Modulasi Lebar Pulsa dijitalUntuk mendapatkan saat t1 dan t2, diusulkan meng-
gunakan 2 match-register dan 1 resetable counter yangtersusun seperti dalam GAMBAR 4.
Dalam makalah ini match-register-Ton disebut jugaturn-on-register, dan match-register-Toff disebut jugaturn-off-register. Match-register-Ton dan match-register-Toff akan dibandingkan dengan counter yangnilainya bertam-bah setiap clock dari nilai terendahNmin sampai nilai maksimum Nmax. Jika nilai counterlebih kecil dari nilai dalam match-register-Ton ataulebih besar dari nilai dalam match-register-Toff, makakeluaran dari sirkit ini adalah logika low (0). Jika nilai
Prosiding InSINas 2012
TR-18 0030: M.A. Purwoadi dkk.
GAMBAR 4: Sirkit PWM generator
counter sama atau lebih besar match-register-Ton dansama atau lebih kecil dari nilai dalam match-register-Toff, maka keluaran dari sirkit ini adalah logika high (1).Keluaran dari sirkit ini dihubungkan sebagai masukkandari IGBT driver. Hasil yang dicapai akan menyerupaisinyal dalam GAMBAR 5 berikut ini.
GAMBAR 5: Sinyal PWM
GAMBAR 6: Arsitektur generator PWM
GAMBAR 6 memperlihatkan implemen-tasi PWMgenerator yang diusulkan dalam Field ProgrammableGate Array (FPGA). FPGA dipilih karena kemampuan-nya melakukan 12 kompa-rasi secara paralel yang tidakdapat dilakukan oleh satu prosesor. Tambahan buffer-register digunakan untuk menerima data kapan sajasebe-lum awal perioda komutasi di mana data tersebutdimasukkan ke match-register untuk dibandingkan de-ngan counter. Register N, adalah nilai MAX counter se-belum direset ke 0. Multiplexer digunakan untuk mem-bagi frekuensi clock FPGA yang biasanya sangat cepat50–100 Mhz.
Interlock adalah bagian yang memastikan bahwa re-lay semikon-duktor atas dan bawah tidak konduksidalam waktu yang bersamaan untuk menghindarihubungan singkat pada sumber tegangan Vdc-link. De-lay ini dinamakan ”dead-time”.
Satu sirkit ini digunakan untuk mengendalikan satuIGBT, sehingga dibutuhkan 6 sirkit di atas denganhanya 1 counter yang dipakai bersama
C. Space-vector PWMUntuk mendapatkan 6 pasang nilai ton dan toff, sep-
asang untuk masing-masing IGBT, digunakan strategispace-vector PWM. Strategi ini digunakan karenategangan sinus motor yang dihasilkan oleh inverteradalah terbesar untuk tegangan DC-Link yang tetap.GAMBAR 7 memperlihatkan konfigurasi inverter danrepre-sentasinya dalam bidang 2 dimensi
GAMBAR 7: Space-vector PWM
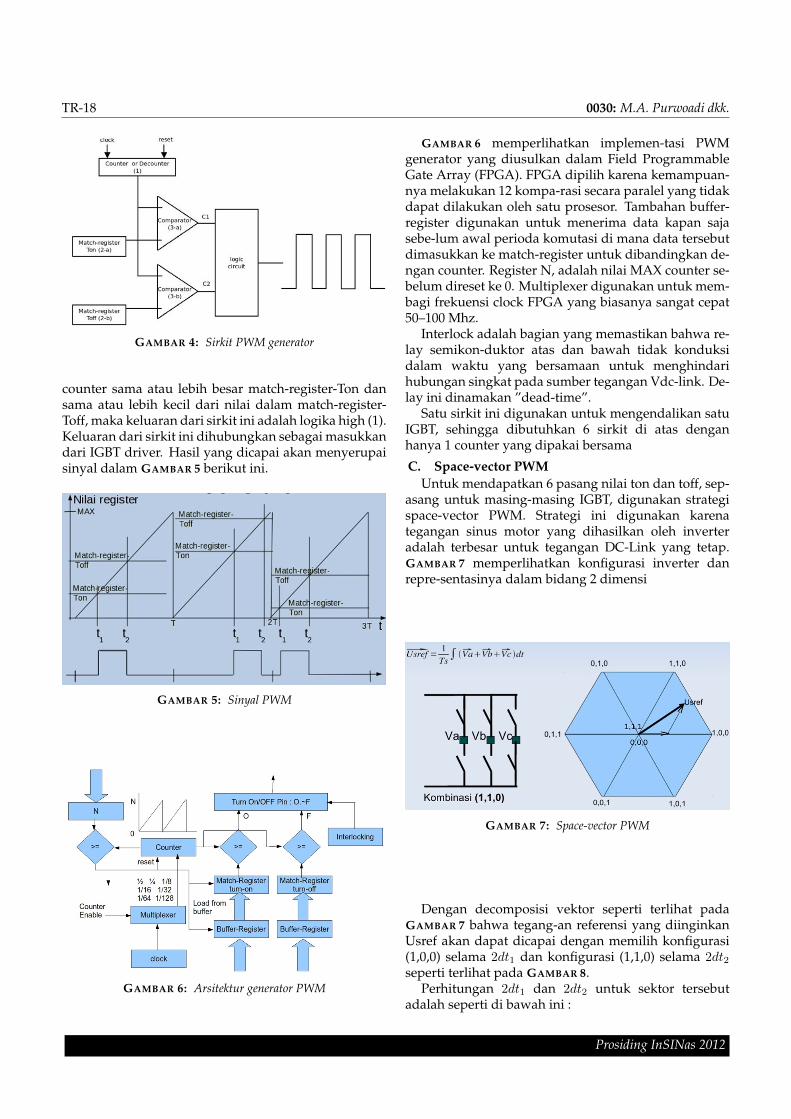
Dengan decomposisi vektor seperti terlihat padaGAMBAR 7 bahwa tegang-an referensi yang diinginkanUsref akan dapat dicapai dengan memilih konfigurasi(1,0,0) selama 2dt1 dan konfigurasi (1,1,0) selama 2dt2seperti terlihat pada GAMBAR 8.
Perhitungan 2dt1 dan 2dt2 untuk sektor tersebutadalah seperti di bawah ini :
Prosiding InSINas 2012
0030: M.A. Purwoadi dkk. TR-19
GAMBAR 8: Diagram waktu yang direpresentasikan dengan space-vector
2dt1 =Vαref − 1√
8Vβref
VMT (2)
2dt2 =2√3
VβrefVM
(3)
di mana
Vαref = Usref cos(θ) (4)Vβref = Usref sin(θ) (5)
VM tegangan maksimum pada konfigurasi (1,0,0)atau (0,1,0) atau (0,0,1). Jika dihitung antar fasa, maka
Vm = VDC−Link (6)
Apabila algoritma pengendalian menggunakanField-Oriented Algorithm dengan tranformasi Park(αβ), maka keluaran dari hasil kalkulasi algoritma pe-ngendalian adalah Vαref dan Vβref . Dengan demikiantidak perlu perhi-tungan trigonometri yang memakanbanyak waktu prosesor. Jika inverter digunakan untukmendapatkan tegangan harmonik dengan frekuensikonstant (statik inverter) maka nilai Vαref dan Vβrefuntuk setiap perioda komutasi dapat dimasukkan kedalam look-up table untuk mengurangi komputasiyang diperlukan.
III. HASIL DAN PEMBAHASANUntuk ujicoba ini, frekuensi komutasi inverter dite-
tapkan sebesar 250 Hz, atau perioda komutasi selama4ms. Counter dikonfigurasi agar mencapai nilai maksi-mum 4000 dari nilai 1, sehingga resolusi waktu yang
diperoleh sistim ini adalah 1 micro second. ”Dead-time” dikonfigurasi 1 micro second.
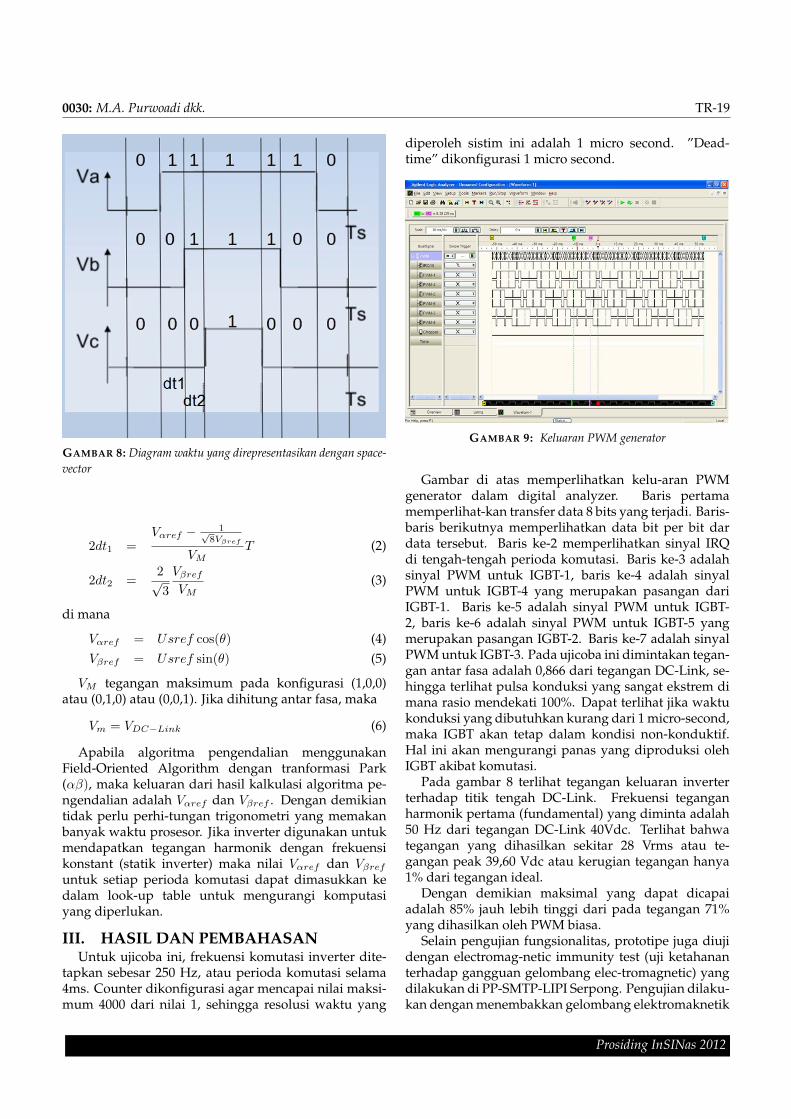
GAMBAR 9: Keluaran PWM generator
Gambar di atas memperlihatkan kelu-aran PWMgenerator dalam digital analyzer. Baris pertamamemperlihat-kan transfer data 8 bits yang terjadi. Baris-baris berikutnya memperlihatkan data bit per bit dardata tersebut. Baris ke-2 memperlihatkan sinyal IRQdi tengah-tengah perioda komutasi. Baris ke-3 adalahsinyal PWM untuk IGBT-1, baris ke-4 adalah sinyalPWM untuk IGBT-4 yang merupakan pasangan dariIGBT-1. Baris ke-5 adalah sinyal PWM untuk IGBT-2, baris ke-6 adalah sinyal PWM untuk IGBT-5 yangmerupakan pasangan IGBT-2. Baris ke-7 adalah sinyalPWM untuk IGBT-3. Pada ujicoba ini dimintakan tegan-gan antar fasa adalah 0,866 dari tegangan DC-Link, se-hingga terlihat pulsa konduksi yang sangat ekstrem dimana rasio mendekati 100%. Dapat terlihat jika waktukonduksi yang dibutuhkan kurang dari 1 micro-second,maka IGBT akan tetap dalam kondisi non-konduktif.Hal ini akan mengurangi panas yang diproduksi olehIGBT akibat komutasi.
Pada gambar 8 terlihat tegangan keluaran inverterterhadap titik tengah DC-Link. Frekuensi teganganharmonik pertama (fundamental) yang diminta adalah50 Hz dari tegangan DC-Link 40Vdc. Terlihat bahwategangan yang dihasilkan sekitar 28 Vrms atau te-gangan peak 39,60 Vdc atau kerugian tegangan hanya1% dari tegangan ideal.
Dengan demikian maksimal yang dapat dicapaiadalah 85% jauh lebih tinggi dari pada tegangan 71%yang dihasilkan oleh PWM biasa.
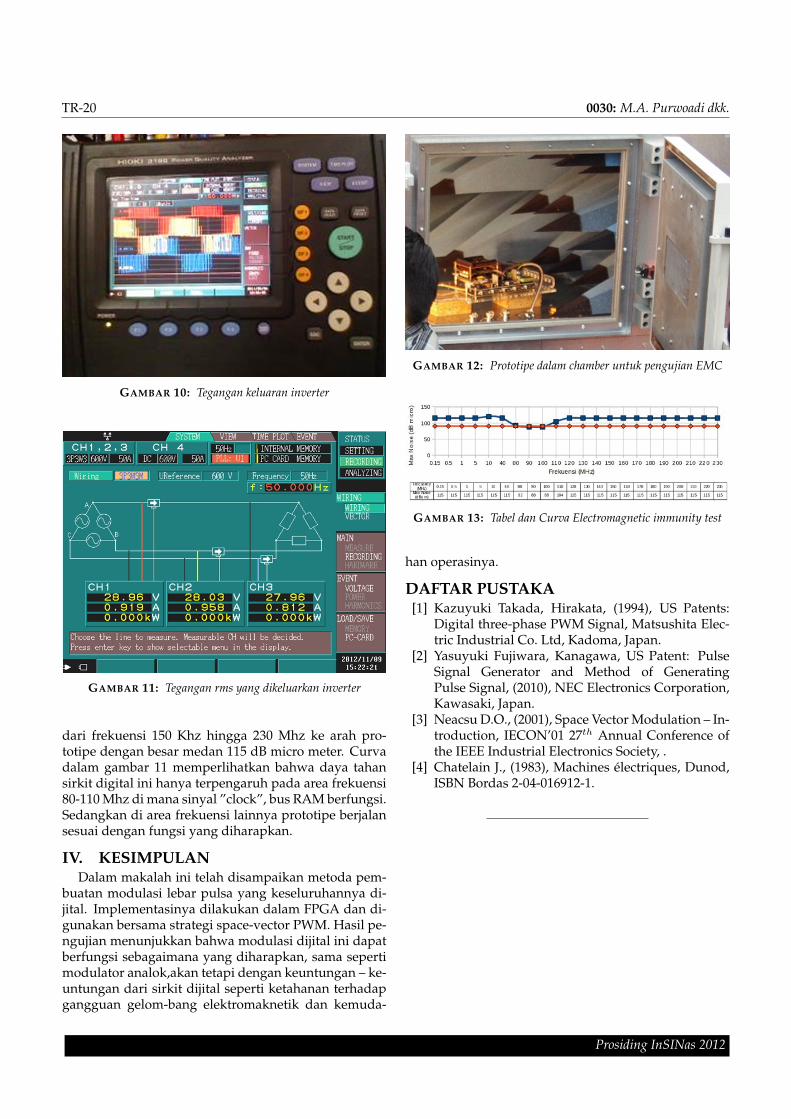
Selain pengujian fungsionalitas, prototipe juga diujidengan electromag-netic immunity test (uji ketahananterhadap gangguan gelombang elec-tromagnetic) yangdilakukan di PP-SMTP-LIPI Serpong. Pengujian dilaku-kan dengan menembakkan gelombang elektromaknetik
Prosiding InSINas 2012
TR-20 0030: M.A. Purwoadi dkk.
GAMBAR 10: Tegangan keluaran inverter
GAMBAR 11: Tegangan rms yang dikeluarkan inverter
dari frekuensi 150 Khz hingga 230 Mhz ke arah pro-totipe dengan besar medan 115 dB micro meter. Curvadalam gambar 11 memperlihatkan bahwa daya tahansirkit digital ini hanya terpengaruh pada area frekuensi80-110 Mhz di mana sinyal ”clock”, bus RAM berfungsi.Sedangkan di area frekuensi lainnya prototipe berjalansesuai dengan fungsi yang diharapkan.
IV. KESIMPULANDalam makalah ini telah disampaikan metoda pem-
buatan modulasi lebar pulsa yang keseluruhannya di-jital. Implementasinya dilakukan dalam FPGA dan di-gunakan bersama strategi space-vector PWM. Hasil pe-ngujian menunjukkan bahwa modulasi dijital ini dapatberfungsi sebagaimana yang diharapkan, sama sepertimodulator analok,akan tetapi dengan keuntungan – ke-untungan dari sirkit dijital seperti ketahanan terhadapgangguan gelom-bang elektromaknetik dan kemuda-
GAMBAR 12: Prototipe dalam chamber untuk pengujian EMC
GAMBAR 13: Tabel dan Curva Electromagnetic immunity test
han operasinya.
DAFTAR PUSTAKA[1] Kazuyuki Takada, Hirakata, (1994), US Patents:
Digital three-phase PWM Signal, Matsushita Elec-tric Industrial Co. Ltd, Kadoma, Japan.
[2] Yasuyuki Fujiwara, Kanagawa, US Patent: PulseSignal Generator and Method of GeneratingPulse Signal, (2010), NEC Electronics Corporation,Kawasaki, Japan.
[3] Neacsu D.O., (2001), Space Vector Modulation – In-troduction, IECON’01 27th Annual Conference ofthe IEEE Industrial Electronics Society, .
[4] Chatelain J., (1983), Machines electriques, Dunod,ISBN Bordas 2-04-016912-1.
Prosiding InSINas 2012