Download - 13. BAB III.pdf

7/21/2019 13. BAB III.pdf
http://slidepdf.com/reader/full/13-bab-iiipdf 1/16
28
BAB III
PERANCANGAN
Kapal tanpa awak Unmanned Surface Vehicles ( USV ) adalah kendaraan
yang beroperasi di permukaan air tak berawak yang dapat dikendalikan jarak jauh
oleh user. Penggunaan cara kerja alat meliputi IMU ( Inertial Measurement Unit ),
modul GPS, Raspberry Pi, remote control , kamera dan modul. Sistem IMU ( Inertial
Measurement Unit ) sebagai parameter posisi sudut kapal, modul GPS untuk
menetukan posisi kapal terhadap posisi point yang akan dituju, Raspberry Pi pada
sistem ini yang akan digunakan untuk mengakses jalur UART kamera USB, serta
komunikasi wifi dan sensor untuk mendapatkan derajat arah, remote control
digunakan untuk mengendalikan USV secara manual, kamera yang digunakan untuk
melakukan pengambilan gambar dan modul wireless digunakan untuk mengirim
pesan /informasi dari USV atau kapal ke Ground Control Station.
3.1 Prinsip Kerja
Proses kendali kapal akan terus diamati dari Ground Control Station
yang berupa koordinat peta posisi dan visual ,seperti pada (Gambar 3.1)
7/21/2019 13. BAB III.pdf
http://slidepdf.com/reader/full/13-bab-iiipdf 2/16
29
ESC Servo
Raspberry Pi
GPS
Kamera
Wireless
Wireless Komputer Remote
Control
Ground Control Station
Motor
BrushlessUSB
IMU
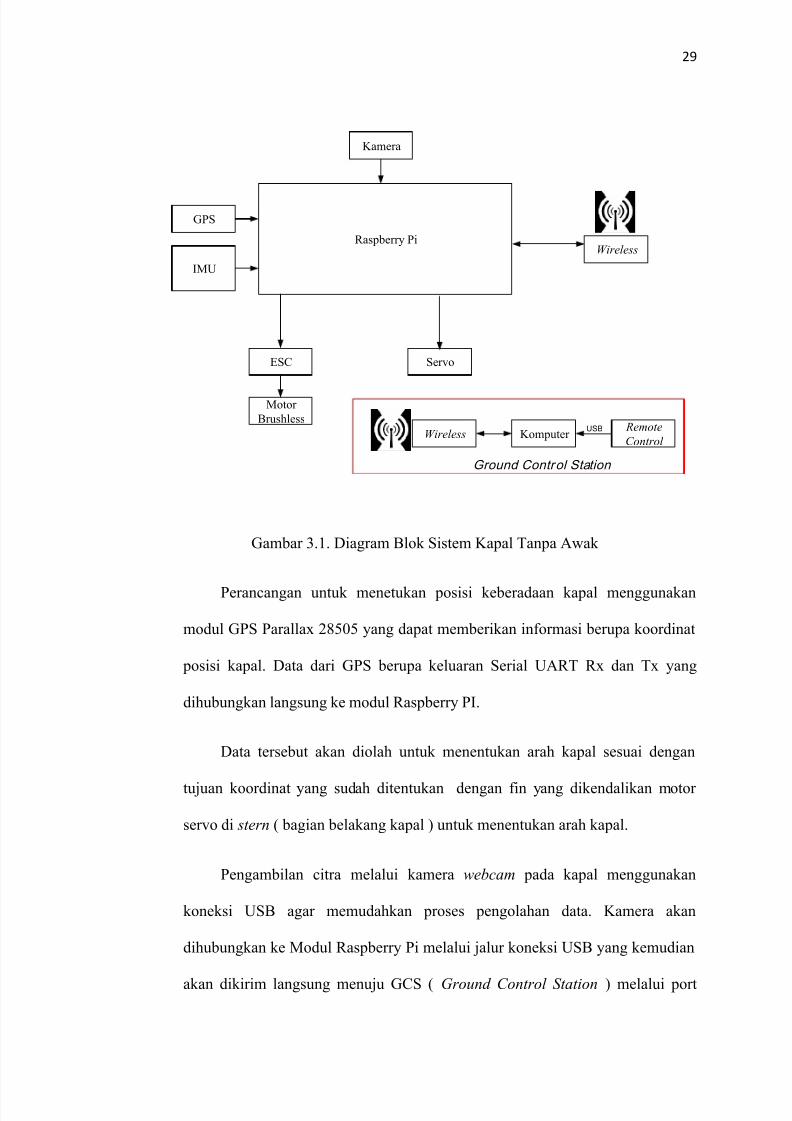
Gambar 3.1. Diagram Blok Sistem Kapal Tanpa Awak
Perancangan untuk menetukan posisi keberadaan kapal menggunakan
modul GPS Parallax 28505 yang dapat memberikan informasi berupa koordinat
posisi kapal. Data dari GPS berupa keluaran Serial UART Rx dan Tx yang
dihubungkan langsung ke modul Raspberry PI.
Data tersebut akan diolah untuk menentukan arah kapal sesuai dengan
tujuan koordinat yang sudah ditentukan dengan fin yang dikendalikan motor
servo di stern ( bagian belakang kapal ) untuk menentukan arah kapal.
Pengambilan citra melalui kamera webcam pada kapal menggunakan
koneksi USB agar memudahkan proses pengolahan data. Kamera akan
dihubungkan ke Modul Raspberry Pi melalui jalur koneksi USB yang kemudian
akan dikirim langsung menuju GCS ( Ground Control Station ) melalui port

7/21/2019 13. BAB III.pdf
http://slidepdf.com/reader/full/13-bab-iiipdf 3/16
30
USB dengan komunikasi Wireless menggunakan TP-LINK TL-WN725N.
Setiap informasi akan ditampilkan pada komputer dengan menggunakan aplikasi
Visual Studio berupa GUI ( Graphical User Interface ) agar mempermudah
pengamatan. Bersamaan dengan itu kapal akan menuju titik yang sudah
ditentukan dari user di GCS dan kapal akan mengirimkan citra selama proses
pemantauan berlangsung.
Ground Control Station akan mengirimkan data berupa koordinat posisi
tujuan kapal, maka proses akan di handle oleh sistem kendali manual yang akan
menuju posisi tujuan dengan menggunakan remote control . Remote control akan
mengendalikan kecepatan ( double dot theta ) dan arah kapal ( θ ) untuk
mencapai tujuan, microprosesor akan memantau parameter yang diterima
sensor.
Parameter sudut keseimbangan kapal pada sensor IMU saat kondisi:
Sudut keseimbangan kapal ke kanan +20 derajat,
Sudut keseimbangan kapal ke kiri -20 derajat,
Keseimbangan kapal berlayar dengan toleransi 10 derajat.
Kondisi ini ditentukan untuk parameter keseimbangan kapal agar tidak
berbelok diatas 20 derajat karena pada saat kapal berbelok diatas -20 derajat
maka kapal akan terbalik. Setelah kapal mencapai sekitar titik yang sudah
ditentukan maka sistem akan diberikan perintah sesuai dengan perintah instruksi
dari user .
Dari Flow Chart Sistem kontrol kapal tanpa awak GCS membaca sudut
Yaw dan Roll untuk menentukan set point toleransinya. Jika boat melebihi set

7/21/2019 13. BAB III.pdf
http://slidepdf.com/reader/full/13-bab-iiipdf 4/16
31
point yang telah ditentukan maka GCS akan memerintahkan dengan remote
control , remote control akan memerintahkan boat dalam 2 control, pertama
control dalam mengatur kecepatan, jika tombol boat ditekan keatas sebanyak
25% MAKA Duty Cycle brushless akan bekerja di 64. Semakin keatas atau
mencapai 100% maka duty cyclenya mencapai 255 dalam kecepatan maksimal.
Yang kedua remote control mengatur arah dari boat, jika kita mau
mengarahkan boat ke kanan maka timing motor servo 1.25ms dan jika kita mau
mengarahkan boat untuk ke kiri maka timing motor servo 1.75ms.
MULAI
Inisialisasi
sudut yaw
dan roll
Menerima
Data
Jika command
tombol 1 25%
Servo
1.75ms
Servo
1.50ms
PWM
Brushless
64
PWM
Brushless
127
PWM
Brushless
191
PWM
Brushless
255
Baca data
sensor IMU
MPU6050
Servo
1.375ms
Servo
1.25ms
Memberi
data GPS
Posisi Kapal Sampai
tujuan?
Jika command
tombol 1 50%
Jika command
tombol 1 75%
Jika command
tombol 1 100%
Jika commandtombol 2 kiri 50%
Jika commandtombol kiri 2 100%
Jika commandtombol kanan 2
50%
Jika commandtombol kanan
100%
Command dari
Ground Control
Station
ya
tidak
ya ya ya
tidak tidak
tidak
tidak tidak tidak
tidak
ya ya ya ya
END
ya
Gambar 3.3. Flowchar Sistem Kontrol Kapal Tanpa Awak

7/21/2019 13. BAB III.pdf
http://slidepdf.com/reader/full/13-bab-iiipdf 5/16
32
3.2 Perangkat Keras
3.2.1 Rangkaian Mikroprosessor
Modul mikroprosesor yang digunakan adalah Raspberry Pi. Raspberry
pi merupakan komputer yang memiliki sistem operasi linux yang memiliki 2
port USB, 1 port RJ45 ( Ethernet LAN port ) dan 8 GPIO UART I2C SPI.
Pada sistem ini yang akan digunakan untuk mengakses IMU, sensor
GPS adalah jalur UART RX dan TX pada PIN.8 dan PIN.10, kamera USB akan
dihubungkan dengan PORT USB pada Raspberry pi, serta komunikasi wireless
dengan GCS ( Ground Control Station ) dengan USB serial. Untuk
mengendalikannnya hubungkan motor servo dengan Raspberry PI di PIN
regulator +5 VDC ( VCC ), GND regulator dan PIN.11 ( SIG ). Raspberry PI
menendalikan speed kapal dengan bantuan Electronic Speed Control ( ESC )
dan motor brushless, cara menghubungkan motor brushless dengan Raspberry
pi di PIN regulator +5 VDC ( VCC ), GND regulator dan PIN.12 ( SIG ) . lalu
PIN motor dihubungkan dengan +12VDC, untuk mengendalikan motor
tersebut. Pada gambar 3.3 adalah perancangan rangkaian modul dengan
Raspberry PI.

7/21/2019 13. BAB III.pdf
http://slidepdf.com/reader/full/13-bab-iiipdf 6/16
33
Gambar 3.4. Perancangan Rangkaian Modul raspberry pi
3.2.2 Sensor IMU dan GPS
Sensor yang dipakai dalam perancangan ini adalah sensor IMU dan
GPS. Sensor IMU ( Inertial Measurement Unit ) datanya diambil
menggunakan jalur I2C BUS yang hanya menggunakan dua pin ( SDA dan
SCL ) yang dihubungkan dengan mikroprosesor secara paralel. Rangkaian
tersebut dapat dilihat di Gambar 3.4.
Gambar 3.5. Perancangan Rangkaian Sensor

7/21/2019 13. BAB III.pdf
http://slidepdf.com/reader/full/13-bab-iiipdf 7/16
34
Sensor IMU dihubungkan dengan PIN Raspberry pada PIN.5 ( SCL )
dan PIN.3 ( SDA ) untuk pengiriman data. Sedangkan untuk sumber daya
sensor dapat dihubungkan pada Regulator ( VCC ) 5 Vdc dan ( GND ).
Tabel 3.1 Perancangan PIN Sensor IMU
IMU RASPBERRY PI
PIN SCL PIN 5
PIN SDA PIN 3
PIN VCC Regulator +5VDC
PIN GND Regulator GND
Cara kerja sensor IMU yaitu Accelerometer berfungsi untuk
mengukur percepatan gravitasi bumi Accelerometer dan dapat digunakan untuk
mendeteksi kemiringan pada pergerakan pitch dan roll. Untuk menghitung
kemiringan pada pitch dan roll, rumusnya adalah:
Roll = arc tan ( y
z ) × (
360
2) (1)
dimana,
x = Percepatan gravitasi di sumbu x ( dalam satuan g )
y = Percepatan gravitasi di sumbu y ( dalam satuan g )
accelerometer pada modul MPU6050 sudah memiliki output digital
ADC ( Analog to Digital ) 16 bit untuk setiap sumbunya ( x, y, z ) dan memliki
pilihan skala pengukuran 2g, 4g, 8g dan 16g. Sehingga untuk melakukan
konversi data accelerometer dari output ADC 16 bit ke percepatan gravitasi
bumi adalah:

7/21/2019 13. BAB III.pdf
http://slidepdf.com/reader/full/13-bab-iiipdf 8/16
35
a = OutputADC / Faktor Pembagi. (3)
dimana,
a = Percepatan gravitasi di salah satu sumbu accelerometer ( x, y atau
z ) dalam gforce.
Hubungan antara faktor pembagi dan skala yang dipilih ini dapat
dilihat pada tabel berikut:
Tabel 3.2. Hubungan skala pengukuran accelerometer dengan factor
pembaginya
NO. Skala
Faktor
Pembagi/Devider
1 2g 16384 LSB/deg/s2 4g 8192 LSB/deg/s
3 8g 4096 LSB/deg/s
4 16g 2048 LSB/deg/s
Gyroscope digunakan untuk mengukur orientasi berdasarkan prinsip
momentum sudut. Konversi data gyroscope darioutput ADC 16 bit ke satuan
derajat/detik dapat dirumuskan:
ω = OutputADC/ Faktor Pembagi (4)
dimana,
ω = Kecepatan sudut (θ /s atau deg/s )

7/21/2019 13. BAB III.pdf
http://slidepdf.com/reader/full/13-bab-iiipdf 9/16
36
Pada perancangan sisitem ini, GPS akan di hubungkan ke modul Raspberry pi
B+ dengan keluaran data GPS TTL UART serial. Data GPS diproses untuk
menetukan posisi kapal terhadap posisi point yang akan dituju berdasarkan perintah
dari GCS ( Ground Control Station ).
Tabel 3.3. Perancangan PIN GPS
Sensor GPS PARALLAX 28505 RASPBERRY PI
PIN RX PIN 8
PIN TX PIN 10
PIN VCC PIN regulator +5 VDC
PIN GND PIN regulator GND
3.2.3 Modul Wireless
Modul Wireless yang digunakan adalah TP-LINK TL-WN725N, Modul
wireless ini digunakan untuk mengirim pesan /informasi dari USV ke ground Station
bekerja pada frekuensi 2.4-2.48 Ghz . Modul ini memiliki kecepatan 150+ Mbps
dengan kinerja jangkauan hingga 150m. Port pada TP-LINK TL-WN725N
menggunakan USB, sehingga memudahkan untuk dintegrasikan dengan raspberry pi,
sehingga memudahkan untuk dintegrasikan dengan raspberry pi ( Gambar 3.5 ).

7/21/2019 13. BAB III.pdf
http://slidepdf.com/reader/full/13-bab-iiipdf 10/16
37
Gambar 3.6. TP-LINK TL-WN725N ke Raspberry PI b+
3.2.4 Modul Kamera
Kamera yang digunakan untuk melakukan pengambilan gambar adalah
jenis webcam. Webcam memiliki port USB, sehingga memudahkan untuk di
hubungkan dengan Raspberry pi. Kamera ini juga di letakkan fixed di bagian
depan kapal. Kamera ini digunakan karena mempunyai mic ( mempunyai
suara dari kamera ), VGA pixel CMOS dan kualitas 640 x 480 pixels Video
yang digunakan untuk memonitoring perairan.
3.2.5 Motor servo
Motor servo berfungsi untuk mengendalikan fin untuk mengarah laju kapal yang
berada di stern ( bagian belakang kapal ) dan untuk menyeimbangkan laju kapal pada
saat roll dan yaw. Pada saat kapal sedang berbelok kekanan dan kekiri kapal
membutuhkan range berputar sekitar 1-2 meter, ini karena kapal mempunyai
7/21/2019 13. BAB III.pdf
http://slidepdf.com/reader/full/13-bab-iiipdf 11/16
38
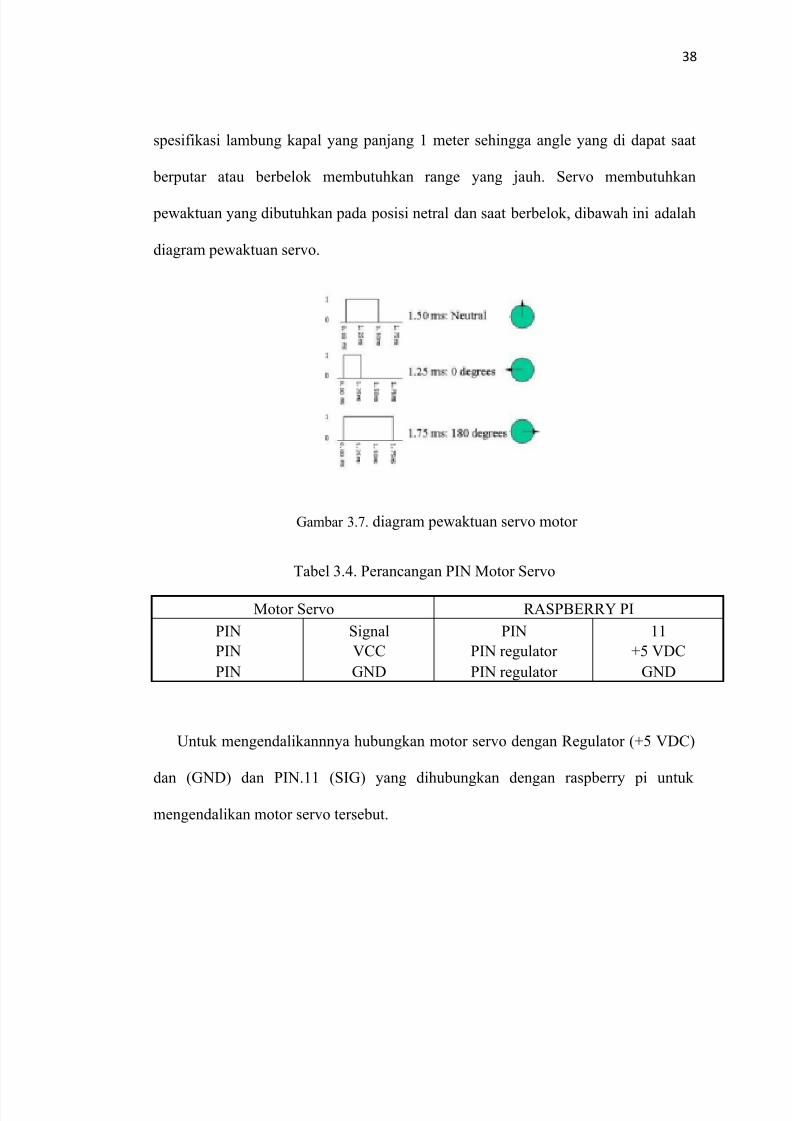
spesifikasi lambung kapal yang panjang 1 meter sehingga angle yang di dapat saat
berputar atau berbelok membutuhkan range yang jauh. Servo membutuhkan
pewaktuan yang dibutuhkan pada posisi netral dan saat berbelok, dibawah ini adalah
diagram pewaktuan servo.
Gambar 3.7. diagram pewaktuan servo motor
Tabel 3.4. Perancangan PIN Motor Servo
Motor Servo RASPBERRY PI
PIN Signal PIN 11
PIN VCC PIN regulator +5 VDC
PIN GND PIN regulator GND
Untuk mengendalikannnya hubungkan motor servo dengan Regulator (+5 VDC)
dan (GND) dan PIN.11 (SIG) yang dihubungkan dengan raspberry pi untuk
mengendalikan motor servo tersebut.

7/21/2019 13. BAB III.pdf
http://slidepdf.com/reader/full/13-bab-iiipdf 12/16
39
Gambar 3.8. Rangkaian dari Motor Servo
3.2.6 Driver Motor dan Motor DC Brushless
Motor DC Brushless bekerja dengan controller melalui pergantian
elektronik. Dengan metode analog setiap perubahan PWM-nya sangat halus,
sedangkan menggunakan metode digital setiap perubahan PWM dipengaruhi
oleh resolusidari PWM itu sendiri. Resolusi adalah jumlah variasi perubahan
nilai dalam PWM tersebut. Misalkan suatu PWM memiliki resolusi 8 bit
berarti PWM inimemiliki variasi perubahan nilai sebanyak 28 = 256 variasi
mulai dari 0 – 255 perubahan nilai yang mewakili duty cycle 0 – 100% dari
keluaran PWM tersebut.

7/21/2019 13. BAB III.pdf
http://slidepdf.com/reader/full/13-bab-iiipdf 13/16
40
Gambar 3.9. Duty Cycle dan Resolusi PWM
Electronic Speed Control atau yang disebut dengan ESC adalah sirkuit
elektronik dengan tujuan untuk memvariasikan kecepatan motor listrik, arah
dan mungkin juga bertindak sebagai rem dinamis. Di alat ini motor brushless
dihubungkan dengan esc
Raspberry PI menendalikan speed kapal dengan bantuan
electronic speed
control (ESC dan motor brushless, cara menghubungkan motor brushless
dengan regulator (+5VDC) dan (GND) dan PIN.12 (SIG) di raspberry pi
untuk mengendalikan motor tersebut.
Tabel 3.5. Perancangan PIN Motor Brushless + Eletronic Speed Control
Motor Brushless + Eletronic Speed Control RASPBERRY PI
PIN RX PIN 8
PIN TX PIN 10
PIN VCC PIN regulator +5 VDC
7/21/2019 13. BAB III.pdf
http://slidepdf.com/reader/full/13-bab-iiipdf 14/16
41
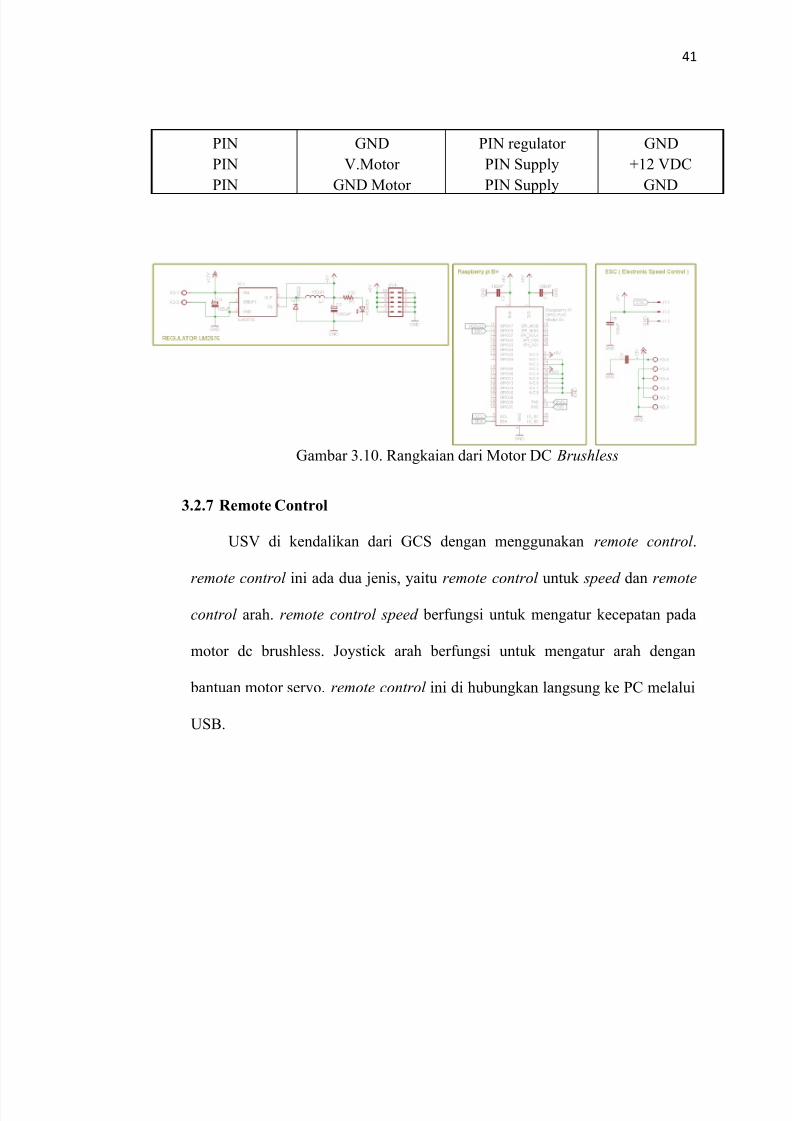
PIN GND PIN regulator GND
PIN V.Motor PIN Supply +12 VDC
PIN GND Motor PIN Supply GND
Gambar 3.10. Rangkaian dari Motor DC Brushless
3.2.7 Remote Control
USV di kendalikan dari GCS dengan menggunakan remote control .
remote control ini ada dua jenis, yaitu remote control untuk speed dan remote
control arah. remote control speed berfungsi untuk mengatur kecepatan pada
motor dc brushless. Joystick arah berfungsi untuk mengatur arah dengan
bantuan motor servo. remote control ini di hubungkan langsung ke PC melalui
USB.

7/21/2019 13. BAB III.pdf
http://slidepdf.com/reader/full/13-bab-iiipdf 15/16
42
Gambar 3.11. Rangkaian Remote Control
3.3 Perangkat lunak
Kendali sistem kerja monitoring yang menggunakan sebuah mikrokontroler
harus dirancang melalui kode listing atau programming . Rancangan tersebut nantinya
akan dijadikan sebagai algoritma kendali dari keseluruhan sistem kerja kapal. Seluruh
algoritma pemrograman dibuat menggunakan bahaca C dengan compiler Code Vision
AVR versi 2.03.4.Sedangkan untuk programming Raspbery Pi menggunakan software
GCC untuk mengaktifkan port USB dan komunikasi UART.
3.3.1 Pembacaan Sensor
Data dari sensor yang terdapat pada modul IMU melalui jalur I2C dan
GPS diambil melalui jalur serial Rx dan Tx. data yang diperlukan berupa
perubahan posisi serta arah tujuan kapal. Setelah data tersebut diolah,
kemudian sensor akan mengirimkan data tersebut secara serial ke Raspberry pi.

7/21/2019 13. BAB III.pdf
http://slidepdf.com/reader/full/13-bab-iiipdf 16/16
43
Raspberry pi akan meneruskan data tersebut bersamaan dengan data hasil citra
gambar dari kamera USB menuju GCS (Ground Control Station) menggunakan
jalur Ethernet melalui jalur nirkabel atau wifi dan data ditampilkan di interface.
3.3.2 Perancangan Tampilan I nterf ace
Data setiap sensor ,GPS dan Kamera akan di tampilkan dan dimonitoring
pada GUI (Graphical User Interface) yang menggunakan software Visual
Studio.
Gambar 3.13. Interface Kapal Tanpa Awak







