rekabentuk pengawal suai untuk model...
TRANSCRIPT

REKABENTUK PENGAWAL SUAI UNTUK MODEL HELIKOPTER
MAHASAN BIN AHMAD
7 MEI 2008
i
“ Saya akui bahawa saya telah membaca karya ini pada pandangan saya karya ini adalah
memadai skop dan kualiti untuk tujuan penganugerahan Ijazah Sarjana Muda
Kejuruteraan Elektrik ( Kawalan, Instrumentasi dan Automasi ).”
Tandatangan :………………………………….
Nama Penyelia : PN. SAHAZATI BT MD ROZALI
Tarikh : 7 MEI 2008

ii
MEREKABENTUK PENGAWAL SUAI UNTUK SISTEM TANGKI
BERKEMBAR
MAHASAN BIN AHMAD
Laporan projek ini dikemukakan sebagai memenuhi sebahagian syarat
Penganugerahan Ijazah Sarjana Muda Kejuruteraan Elektrik
( Kawalan, Instrumentasi dan Automasi )
Fakulti Kejuruteraan Elektrik
Universiti Teknikal Malaysia Melaka
MEI 2008
iii
“Saya akui laporan ini adalah hasil kerja saya sendiri kecuali pada ringkasan, petikan
dan lampiran yang tiap-tiap satunya saya nyatakan sumbernya.”
Tandatangan :
Nama : MAHASAN BIN AHMAD
Tarikh : 7 MEI 2008

iv
Untuk ibu dan ayah khasnya,
Setinggi-tinggi penghargaan di atas kasih sayang, jasa dan pengorbanan yang
dicurahkan untuk kejayaan anakmu ini
Segala pengorbanan akan tetap ku kenang
Sehingga ke akhir hayatku…..
Untuk penyelia dan pensyarah-pensyarahku,
Untuk kawan-kawan,
Untuk seluruh umat manusia,
Terima kasih atas doa dan kasih sayang dari kalian semua…….
v
PENGHARGAAN
Segala puji bagi Allah SWT kerana dengan limpah kurniaNya dapatlah saya
menyempurnakan Projek Sarjana Muda ini. Selawat dan salam ke atas junjungan besar
Rasulullah SAW, keluarga baginda dan para sahabat baginda.
Setinggi-tinggi penghargaan dan ucapan terima kasih saya tujukan kepada
pensyarah penyelia saya iaitu Pn. Sahazati Bt Md Rozali yang telah mengembeling
tenaga dan banyak membantu saya dalam memberi tunjuk ajar dan memperbaiki
kesilapan selama menyiapkan Projek Sarjana Muda ini. Tanpa beliau tidak mungkin
saya dapat menyiapkan kajian ini dalam tempoh yang ditetapkan.
Saya merakamkan ucapan terima kasih ini kepada keluarga saya terutamanya ibu
bapa yang telah banyak membantu dari segi sokongan moral dan juga dari segi
kewangan dalam menyiapkan projek ini. Akhir sekali kepada rakan-rakan seperjuangan
yang banyak membantu dalam berkongsi idea dan pendapat dari semasa ke semasa.
Semoga usaha murni dan pengorbanan yang diberikan anda semua akan
mendapat berkat dan dirahmati Allah SWT. Diharap juga agar Projek Sarjana Muda ini
dapat dimanfaatkan oleh semua pihak. Segala yang baik itu datang dari keizinan Allah
SWT manakala yang kurang itu adalah dari kelemahan diri saya sendiri.

vi
ABSTRAK
Industri petrokimia, industri pembuatan kertas, dan lain-lain merupakan industri
utama dimana kawalan aras cecair dan arus adalah penting. Lazimnya, cecair-cecair itu
akan diproses secara rawatan kimia atau pencampuran dalam tangki tetapi selalunya aras
cecair dalam tangki tersebut perlu dikawal dan arus antara tangki perlu diteraturkan
dalam keadaan sistem yang sememangnya tidak linear dan modelnya kurang maklumat.
Projek ini menyelidik penggunaan Model Reference Adaptive Control atau MRAC
dalam pengawalan aras cecair pada sistem tangki berkembar dengan memanipulasikan
pam air di tangki. Ini bagi menunjukkan bahawa MRAC dapat menghasilkan isyarat
kawalan yang munasabah dalam kawalan aras cecair bagi sistem, hasil daripada
tindakbalas kepada titik rujukan aras cecair yang diberi dalam keadaan sistem yang tidak
linear dan terdapatnya pengukuran hingar dalam proses secara serentak. Kebolehan
menggunakan hanya pengukuran masukan-keluaran dalam mekanisma adaptasi ialah
merupakan ciri-ciri istimewa bagi MRAC dimana ia tidak perlukan pengenalanpastian
eksplisit bagi sistem model. Ia juga tidak memerlukan penyelesaian terhadap dinamik
persamaan linear (atau tidak linear) bagi sistem tersebut. Ujian prestasi penjejakan
(tracking performance test), penyisihan gangguan dan perubahan parameter sistem telah
dijalankan untuk menilai prestasi pengawal MRAC dan dibandingkan dengan prestasi
sistem asal tangki berkembar. Hasil daripada projek ini menunjukkan MRAC lebih
robust dimana sistem perubahan parameter tidak memberi kesan pada MRAC walaupun
ia sedikit sensitif terhadap hingar. Rangka projek ini adalah umum dalam memberi
gambaran keseluruhan pada kemungkinan yang akan berlaku apabila pengawal MRAC
dilaksanakan untuk sistem masa-nyata.
vii
ABSTRACT
Industries such as petro-chemical industries, paper making industries, waste
management and others are the vital industries where liquid level and flow control are
essential. Liquids will be processed by chemical or mixing treatment in the tanks, but
always the level fluid in the tanks must be controlled, and the flow between tanks must
be regulated in the presence of nonlinearity and inexact model description of the plant.
This project investigates the usage of Model Reference Adaptive Control (MRAC) in
controlling the liquid level in the Coupled-Tank plant through variable manipulation of
water pump. It is to show that MRAC could produce appropriate control signal to the
coupled-tank system in response to the given desired water level with plant nonlinearity
and measurement noise present simultaneously. The ability to use only input-output
measurement of the plant in adaptation mechanism is the MRAC’s special
characteristics that does not require the explicit identification of the model description
nor the solution to linear(or nonlinear) equations of the respective plant dynamics. A
dynamic model of the plant is initially developed. Simulation studies are then conducted
based on the developed model using Matlab and Simulink. A series of tracking
performance tests, disturbance rejection and plant parameter changes are conducted to
evaluate the controller performance in comparison to original system of coupled tank.
The outcome of the project reveals that MRAC is more robust when there is a change in
system parameters despite of its sensitivity to measurement noise. The framework of this
project is generic enough to have an overview of the possible outcome before
implementing the MRAC controller in real-time system in the future.
viii
ISI KANDUNGAN
BAB PERKARA HALAMAN
PENGHARGAAN v
ABSTRAK vi
KANDUNGAN viii
SENARAI RAJAH xi
SENARAI JADUAL xiii
SENARAI SINGKATAN xiv
1 PENDAHULUAN
1.1 Pengenalan 1
1.2 Objektif 2
1.3 Skop projek 2
1.4 Penyataan masalah 3
2 KAJIAN ILMIAH
2.1 Pengenalan 5
2.2 Kajian Kes Pengawal Suai Model Rujukan 5
2.2.1 Concepts, Methods and Techniques in
Adaptive Control 5
2.2.2 “A Multivariable Adaptive Controller for
Autonomous Helicopters” 6
2.2.3 ‘Adaptive Control Of Micro Air Vehicles’ 7
2.3 Model dan Sistem Tangki Berkembar 7
ix
2.4 Perisian MATLAB 8
3 SISTEM TANGKI BERKEMBAR
3.1 Pengenalan 12
3.2 Pengenalan Alat Kawalan Tangki Berkembar
CTS-001 12
3.3 Prinsip Kawalan Asas Sistem Tangki
Berkembar CTS-001 14
4 METODOLOGI
4.1 Pengenalan 16
4.2 Metodologi Projek 16
4.3 Memahami Sistem Tangki Berkembar 17
4.4 Mengenalpasti Dinamik Proses Tidak Linear 18
4.5 Merekabentuk Pengawal 18
4.6 Simulasi 18
5 PENGAWAL SUAI MODEL RUJUKAN
5.1 Pengenalan 20
5.2 Definasi 21
5.2.1 Sistem Penyesuaian 21
5.2.2 Sistem Penyesuaian Model
Rujukan (MRAS) 21
5.3 Hukum Penyesuaian 22
5.3.1 Kaedah Gradient / MIT 23
5.3.2 Rekabentuk Lyapunov 24
6 PEMODELAN MATEMATIK SISTEM TANGKI
BERKEMBAR
6.1 Pengenalan 25
6.2 Model Tidak Linear Sistem Tangki Berkembar 25
x
6.3 Model Penggangguan Linear. 27
6.4 Sistem Proses Masukan Tunggal Keluaran
Tunggal (SISO) Tertib Pertama 30
6.5 Sistem Proses Masukan Tunggal Keluaran
Tunggal (SISO) Tertib Kedua 32
7 SIMULASI PENGAWAL SUAI MODEL RUJUKAN
7.1 Pengenalan 36
7.2 Analisis Tindakbalas Tidak Tetap Sistem Tangki
Berkembar CTS-001 36
7.3 Analisa Sambutan Langkah Sistem Tertib Kedua 39
7.4 Merekabentuk Pengawal MRAC 41
7.4.1 Simulasi MRAC Menggunakan MATLAB
Simulink 45
7.5 Perbincangan Prestasi Pengawal MRAC 55
8 KESIMPULAN DAN CADANGAN 56
9 RUJUKAN 58
LAMPIRAN 1 59
LAMPIRAN 2 70
LAMPIRAN 3 73
xi
SENARAI RAJAH
NO TAJUK HALAMAN
2.1 Blok Kawalan Suai Model Rujukan 6
2.2 Paparan Utama Program MATLAB 9
2.3 Paparan Sumber Blok Simulink 10
2.4 Paparan Blok Simulasi Pada Simulink 10
3.1 Alat Kawalan Tangki Berkembar CTS-001 13
3.2 Skematik CTS-001 15
4.1 Carta Alir Metodologi Projek 19
5.1 Kawalan Suai Model Rujukan 22
5.2 Blok Kaedah MIT 24
6.1 Rajah Blok Proses Tertib Pertama Dalam
Bentuk Laplace 31
6.2 Rajah Blok Tertib Kedua Model Proses
Dalam Laplace 34
7.1 Ujian Tindakbalas Keluaran Untuk Sistem
Tertib Kedua 37
7.2 Sambutan Langkah Untuk Sistem Tertib
Kedua Tangki Berkembar 40
7.3 Blok Sistem MRAC 41
7.4 Gambar Rajah Blok Bersama Terbitan
Sistem Pengawal 44
7.5 Gambar Rajah Blok Simulasi Pengawal
Pada MATLAB 47
xii
7.6 Keluaran-Keluaran Daripada Simulasi
MRAC 48
7.7 Graf Sambutan Langkah Untuk Model
Rujukan 49
7.8 Rajah Blok Pengawal MRAC Dengan
Tambahan Pengganda 50
7.9 Perbandingan Keluaran Simulasi Pada
Sistem Tangki Berkembar 1 51
7.10 Perbandingan Keluaran Simulasi Pada
Sistem Tangki Berkembar 2 52
7.11 Perbandingan Keluaran Simulasi Pada
Sistem Tangki Berkembar 3 53
7.12 Perbandingan Keluaran Simulasi Pada
Sistem Tangki Berkembar 4 54
xiii
SENARAI JADUAL
NO TAJUK HALAMAN
7.1 Lima Bacaan Untuk Sistem Tertib Kedua 38
7.2 Spesifikasi Prestasi Bagi Sistem Tertib Kedua
Tangki Berkembar 40
7.3 Spesifikasi Prestasi Sistem Tangki Berkembar 45
7.4 Spesifikasi Prestasi Perbandingan Sistem Tangki
Berkembar 49
7.5 Perbandingan Spesifikasi Prestasi Keluaran Sistem 1 51
7.6 Perbandingan Spesifikasi Prestasi Keluaran Sistem 2 52
7.7 Perbandingan Spesifikasi Prestasi Keluaran Sistem 3 53
7.8 Perbandingan Spesifikasi Prestasi Keluaran Sistem 4 54
xiv
SENARAI SINGKATAN
MRAC - Model Reference Adaptive Control
PD - Proportional and Derivative
PID - Proportional, Integral and Derivative
CTS - Couple Tank System
GPC - Generalized Predictive Control
GUI - Graphical User Interface
FKE - Fakulti Kejuruteraan Elektrik
UTeM - Universiti Teknikal Malaysia Melaka
BEKC - Kursus Sarjana Muda Kejuruteraan Elektrik (Kawalan,
Instrumentasi, dan Automasi
GA - General Algorithm
MAC - Multivariable Adaptive Controller
SISO - Single Input Single Output
1
BAB 1
PENDAHULUAN
1.1 Pengenalan
Kajian dan projek ini dijalankan adalah bertujuan untuk merekabentuk pengawal
suai untuk model tangki berkembar. Ianya merangkumi pengawal suai model rujukan
(MRAC) sebagai pengawal manakala sistem tangki berkembar sebagai sistem yang
dikawal. Pengawal yang digunakan dalam mengawal sistem ini adalah Pengawal Suai
Model Rujukan (MRAC) yang direkabentuk dengan menggunakan Perisisan MATLAB.
Dalam merekabentuk pengawal sistem tangki berkembar, kaedah dan cara yang
perlu dilakukan ialah dengan merekabentuk Pengawal Suai Model Rujukan
menggunakan Perisian MATLAB bagi mengawal tangki berkembar tersebut. Dalam
konteks ini, sebuah pengawal yang sempurna perlu dihasilkan bagi memastikan sistem
dapat beroperasi dengan sistematik dan efisyen.
Merekabentuk pengawal yang baik merupakan satu cabaran dan memerlukan
kemahiran dan ketelitian yang tinggi untuk menghasilkannya. Sebenarnya dalam
menyelesaikan sesuatu masalah yang timbul semasa projek dijalankan, aspek
ketidaktentuan perlu diambil kira kerana sedikit sebanyak kepentingan akan
mempengaruhi operasi keseluruhan projek. Oleh itu, aspek ini sememangnya tidak boleh
diabaikan bagi mengelakkan masalah yang lebih teruk timbul dalam pelaksanaan projek
ini.
2
1.2 Objektif
Matlamat utama dan objektif bagi projek ini adalah :-
i. merekabentuk pengawal sistem tangki berkembar dengan menggunakan
pengawal suai model rujukan.
ii. Untuk mengkaji, mengenalpasti, menganalisa dan mempelajari pengawal suai
dengan lebih mendalam.
iii. Untuk melihat keberkesanan pengawal suai dalam mengawal sesuatu sistem.
iv. Untuk mempelajari dan memahami konsep yang digunakan melalui Perisian
MATLAB dalam mengawal sesuatu sistem.
v. Untuk memahami dan mempelajari konsep sistem kawalan tangki berkembar.
vi. Untuk membangunkan satu sistem penyesuaian untuk sistem berkembar tangki
menggunakan MRAC.
1.3 Skop Projek
Melalui projek ini, pengawal yang direkabentuk dan dihasilkan berjaya
diaplikasikan pada sistem tangki berkembar. Sistem tangki berkembar dikawal
sepenuhnya oleh pengawal yang direkabentuk iaitu Pengawal Suai Model Rujukan
(MRAC). Dalam projek ini, Pengawal Suai Model Rujukan (MRAC) yang digunakan
dipastikan supaya ianya dapat menstabilkan sesuatu sistem dengan menggunakan
Perisisan MATLAB. Ianya begitu penting bagi memastikan objektif utama projek ini
tercapai. Selain itu, bagi memastikan projek mencapai objektifnya tumpuan perlu
berikan sepenuhnya dalam pembangunan perisian melalui simulasi terhadap pengawal.
Seterusnya, analisis terhadap keseluruhan sistem akan dijalankan dari segi
kelancaran, kestabilan dan keberkesanan pengawal MRAC beroperasi.
3
1.4 Penyataan Masalah
Sebelum merekabentuk sesuatu pengawal, hubungan matematik atau hubungan
dinamik antara input dan keluaran sesuatu system perlu diketahui. Prinsip dan
pengetahuan dasar bagi sistem haruslah dikaji bagi memahami sifat tidak linear dalam
satu sistem dinamik. Terdapat faktor-faktor seperti penjejakan, pengurangan kesan yang
tidak dikehendaki dan tidak pasti, sifat-sifat dalam terma masa sambutan seperti
kestabilan (stability), sesetengahnya dalam masa naik ( rise time), lanjakan (overshoot)
dan penjejakan keadaan ralat mantap (steady state tracking error) dan akhirnya
matlamat-matlamat dalam kejuruteraan kawalan bagi mengawal kos dan
kebolehpercayaan yang penting dalam perspektif industri.
Kecanggihan pengawal biasanya bergantung kepada bagaimana darjah
ketidaklinear boleh ditoleransikan dan diandaikan menggunakan teori linear. Tambahan
pula, selain ketidaklinearan mungkin terdapat parameter yang tidak diketahui akan
menghalang objektif untuk mendapatkan sebuah model pengawal sesuatu proses untuk
tujuan kawalan. Faktor-faktor yang berkecuali kebanyakan penyelidik menggunakan
teori kawalan konvensional dan teknik-teknik boleh disenaraikan seperti berikut:-
i. Sistem tidak linear dan mengandungi parameter yang tidak dikenalpasti. Parameter
yang tidak diketahui mungkin tidak dapat dianggarkan secara tepat jika data
percubaan yang tepat tidak diperolehi.
ii. Kelewatan hasil dalam sesuatu sistem proses boleh menyulitkan dalam mencapai
prestasi yang tinggi dalam kawalan terutamanya dalam proses kawalan system
tangki berkembar.
iii. Tedapat beberapa kes yang mana kes tangki berkembar dalam industri terdapat
ciri-ciri gangguan yang berubah dan berterusan. Ini memerlukan peraturan serentak
pada pelbagai pengubah untuk mengekalkan aras cecair tercapai. Oleh itu, sebuah
model haruslah menerangkan bagaimana segala pengubah-pengubah tersebut
paling penting dala sesuatu proses.

4
Disebabkan oleh faktor-faktor tersebut, ianya mungkin sukar untuk merumuskan
satu strategi kawalan berdasarkan analisis model kerana model matematik biasanya telah
linear menjelaskan kerumitan dan ketidaklinearan yang wujud tidak dapat dielakkan
dalam satu sistem yang rumit. Pengawal PID (proportional-integral-derivative)
merupakan satu pengawal yang biasa digunakan dalam sistem kawalan model tidak
linear terutamanya pada sistem kawalan tangki berkembar. Bagaimanapun, pengawal
PID tidak mampu untuk mencapai objektif-objektif kawalan atau memenuhi masa yang
diperlukan untuk ditala tetap kepada sistem dinamik yang dijangka.
Oleh itu, satu teknik kawalan yang teguh dan boleh dipercayai perlu dihasilkan
untuk model kompleks dan sistem yang tidak linear bagi mengatasi ketidakstabilan
sistem yang biasa terdapat dalam proses industri. MRAC atau lebih dikenali Pengawal
Suai Model Rujukan dipilih untuk digandingkan dengan sistem tangki berkembar. Ia
dianggap sebagai satu pendekatan baru dalam pelarasan parameter untuk sebuah sistem
di mana proses dinamik adalah tak linear.
5
BAB 2
KAJIAN ILMIAH
2.1 Pengenalan
Dalam bab ini, maklumat-maklumat mengenai kajian projek diterangkan serba
sedikit. Kajian utama bagi projek ini adalah:
1) Pengawal Suai Model Rujukan
2) Perisian MATLAB
3) Sistem Tangki Berkembar
2.2 Kajian Kes Pengawal Suai Model Rujukan
2.2.1 Concepts, Methods and Techniques in Adaptive Control ( oleh Guy A. Dumont1 and Mihai Huzmezan 2)
Tesis ini merupakan salah satu sumber kajian yang dilakukan dalam
menghasilkan Pengawal Suai Model Rujukan (MRAC) bagi sistem tangki berkembar.
Yang mana hampir 50 tahun percubaan pengawal suai untuk membuktikan pengawal
suai yang akan digunakan dan dirujuk untuk komuniti industri dengan kemudahan
serupa dengan alat-alat kawalan PID terkini. Sejak pengawal suai pertama
dikomersialkan, kemajuan penting dalam rekabentuk dan analisis alat-alat kawalan ini
telah diperolehi.
6
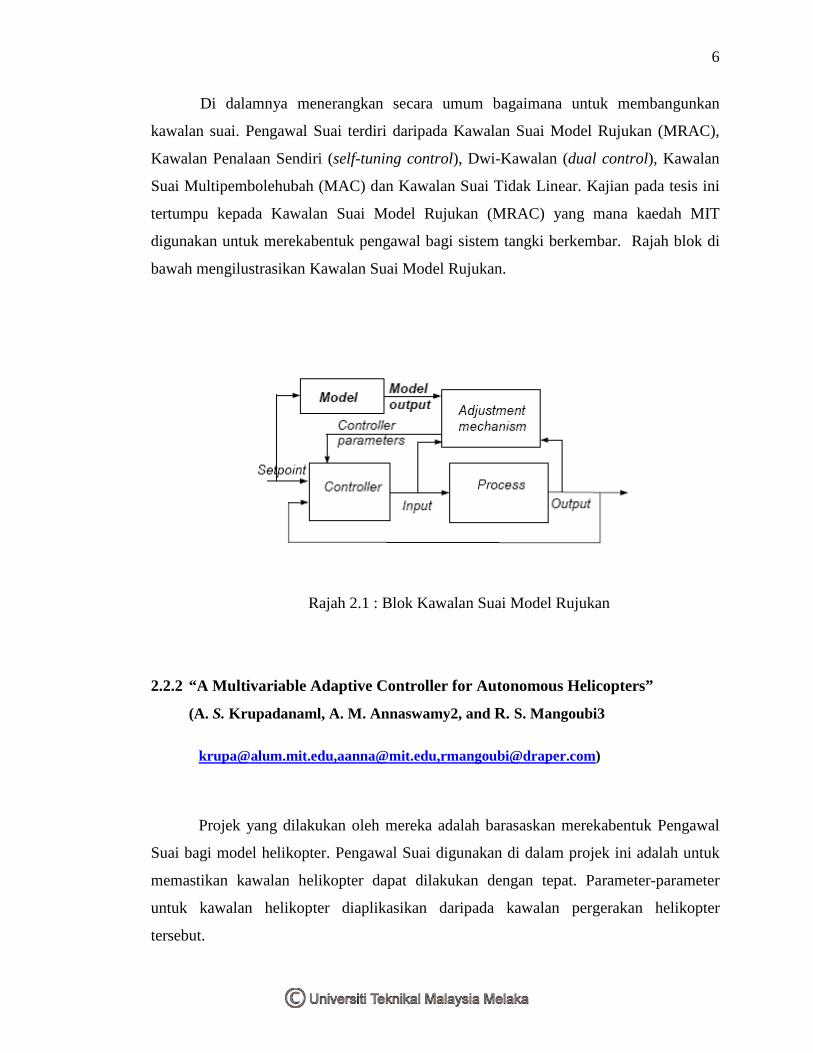
Di dalamnya menerangkan secara umum bagaimana untuk membangunkan
kawalan suai. Pengawal Suai terdiri daripada Kawalan Suai Model Rujukan (MRAC),
Kawalan Penalaan Sendiri (self-tuning control), Dwi-Kawalan (dual control), Kawalan
Suai Multipembolehubah (MAC) dan Kawalan Suai Tidak Linear. Kajian pada tesis ini
tertumpu kepada Kawalan Suai Model Rujukan (MRAC) yang mana kaedah MIT
digunakan untuk merekabentuk pengawal bagi sistem tangki berkembar. Rajah blok di
bawah mengilustrasikan Kawalan Suai Model Rujukan.
Rajah 2.1 : Blok Kawalan Suai Model Rujukan
2.2.2 “A Multivariable Adaptive Controller for Autonomous Helicopters”
(A. S. Krupadanaml, A. M. Annaswamy2, and R. S. Mangoubi3
[email protected],[email protected],[email protected])
Projek yang dilakukan oleh mereka adalah barasaskan merekabentuk Pengawal
Suai bagi model helikopter. Pengawal Suai digunakan di dalam projek ini adalah untuk
memastikan kawalan helikopter dapat dilakukan dengan tepat. Parameter-parameter
untuk kawalan helikopter diaplikasikan daripada kawalan pergerakan helikopter
tersebut.
7
2.2.3 ‘Adaptive Control Of Micro Air Vehicles’
(oleh Joshua Stephen Matthews, Brigham Young University)
Dalam tesis ini diterangkan bagaimana untuk membangunkan Pengawal Suai
Model Rujukan mengggunakan kaedah Lyapunov yang mana bagi memastikan
pengendalian MAV tanpa jurutebang dilakukan dengan cekap dan efisyen. Algoritma
kawalan suai menala sendiri MAV dan mengganti perubahan semasa MAV beroperasi.
2.3 Model dan Sistem Tangki Berkembar
Sistem kawalan proses bagi sistem tangki berkembar merupakan sistem kawalan
yang biasa dipraktikkan dalam makmal kejuruteraan kawalan. Tangki berkembar adalah
satu peralatan terbaik untuk mengkaji kesan tidak linear, yang mana pengaruh kepekaan
algoritma dicadangkan untuk menukar dalam titik pengendalian keadaan mantap untuk
pelaksanaan masa nyata. Ini adalah kerana hasil yang diperolehi berdasarkan Teori
Kawalan Ramalan Am (GPC) akan menghubungkan pendekatan masa nyata berdigit
untuk dipadankan dengan kawalan proses sistem tangki berkembar. Selepas sistem
tangki cecair digunakan dalam industri, sistem yang berhubungan dengan keperluan
mengakibatkan banyak masalah peragaan dan kawalan lantaran penggunaan mereka
yang interaktif dengan unsur-unsur proses lain.
Ia adalah suatu masalah yang lazim dalam proses industri untuk mengawal tahap
aras tangki seperti dalam tangki-tangki simpanan, paduan dan tindak balas kimia kapal-
kapal. Sebagai contoh dalam situasi yang lain, ia memerlukan bendalir atau cecair untuk
menjadi satu kadar malar. Algoritma pengawal dicadangkan kemudian mencuba untuk
menyelesaikan masalah untuk pengawalan proses yang kompleks seperti sistem yang
mana tidak stabil dengan ketidaklinearan. GPC adalah sesuai kerana polinomial
pemerhati secara bebas membaiki respons untuk sebarang gangguan. Satu perbincangan
aplikasi-aplikasi GPC yang sesuai untuk beberapa proses-proses industri menyimpulkan
bahawa kaedah tersebut adalah mudah untuk digunakan dan berkesan.

8
Terdapat penyelidikan yang telah dilakukan ke atas kawalan aras tangki
menggunakan tangki berkembar dengan objektif kawalan yang berbeza. Pada tahun
1998, Seng Teo Lian telah menghasilkan Pengawal Neuro-fuzzy algoritma yang secara
genetik (NFCGA) yang telah mengabungkan ketiga-tiga teknik pintar tiruan yang
terkenal untuk menilaikan tentang kawalan proses. Ia telah melaporkan bahawa satu-
satunya Pengawal Fuzzy Logic dalam sistem masa nyata menghadapi beberapa masalah
walaupun Algoritma Am (GA) telah digunakan sebagi penalaan proses. Ini adalah
disebabkan oleh penggunaan GA untuk menalakan satu sistem proses adalah tidak
praktik dan memerlukan jangka masa yang panjang.
Peringkat peragaan adalah satu bahagian yang sangat penting dan perlu diberi
penekanan dalam merekabentuk satu sistem kawalan. Model yang sepadan seharusnya
mengambarkan ciri-ciri keseluruhan sistem yang mana sistem waktu sebenar yang
dikawal. Bagaimanapun dalam pelaksanaan sistem nyata, model yang telah direkabentuk
untuk simulasi mungkin berbeza. Terdapat dua cara untuk menghasilkan model, yang
pertama ialah pemodelan matematik menggunakan pengetahuan tentang fizik, kimia dan
sains-sains lain untuk menghuraikan satu persamaan gerakan dengan hukum Newton,
litar elektrik dengan hukum Ohms bergantung kehendak proses, ia dikenali sebagai
kaedah berparameter. Cara kedua memerlukan data eksperimen yang didapati melalui
respons pengukuran proses yang dikenali sebagai indetifikasi sistem atau kaedah tak
berparameter. Dalam projek ini, MRAC akan digunakan untuk membentuk pengawal
bagi model yang digunakan. Ia adalah satu teknik yang sesuai untuk memperagakan satu
sistem yang tidak linear adalah dengan pelinearan persamaan titik pengendalian yang
pratentu.
9
2.4 Perisian MATLAB
MATLAB merupakan satu perisian kiraan berangka dan pengaturcaraan bahasa.
Dibangunkan oleh The MathWorks, MATLAB digunakan untuk memanipulasi matrik
dengan mudah, memplot fungsi-fungsi dan data, pelaksanaan algoritma, penciptaan
perkaitan pengguna dan pengantaramukaan dengan program-program dalam bahasa-
bahasa lain. Ia juga digunakan dengan meluas dalam pendidikan, khususnya pendidikan
aljabar dan analisis berangka lurus, dan adalah terkenal di kalangan ahli-ahli sains
terlibat dengan pemprosesan imej. Rajah 2.2 menunjukkan paparan pada paparan utama
program MATLAB.
Rajah 2.2 : Paparan Utama Program MATLAB
MATLAB juga digunakan dengan meluas dalam bidang kejuruteraan sistem
kawalan kerana ianya banyak membantu dalam proses simulasi sesuatu sistem kawalan.
MATLAB mengandungi :-
1. Simulink – grafik rajah blok untuk memodelkan, menganalisis dan
mensimulasi sistem dinamik. Ia digunakan dengan meluas dalam teori