laporan praktikum fisiologi muskuloskeletal b-6
DESCRIPTION
praktikum faal muskuloskeletalTRANSCRIPT
LAPORAN PRAKTIKUM FISIOLOGI
BLOK MUSKULOSKELETAL
Oleh :
KELOMPOK B-3
Ketua : Yudha Ferriansyah (1102010299)
Sekretaris : Prissilma Tania (1102010221)
Anggota : Vania Fildza (1102009291)
Mutiara Fadhila (1102010192)
Novi Alvirahmi (1102010209)
Novia Rizky Zyanti Azzahra (1102010211)
Reza Mardany (1102010238)
Syarafina Raihan (1102010275)
Tri Rizky Nugraha (1102010280)
Tyas Aulia Puspa (1102010281)
FAKULTAS KEDOKTERAN
UNIVERSITAS YARSI
JAKARTA
2011/2012
DAFTAR ISI
I. Pendahuluan...................................................................................................3
II. Pelaksanaan & Hasil Praktikum......................................................................4
Otot Rangka I..................................................................................................4
A. Tujuan Percobaan....................................................................................4
B. Alat Dan Bahan........................................................................................4
C. Tata Kerja.................................................................................................4
D. Hasil Praktikum........................................................................................5
E. Menjawab Pertanyaan..............................................................................6
F. Kesimpulan...............................................................................................6
Otot Rangka II.................................................................................................6
A. Tujuan Percobaan....................................................................................6
B. Alat Dan Bahan........................................................................................7
C. Tata Cara.................................................................................................7
D. Hasil Praktikum........................................................................................8
E. Menjawab Pertanyaan............................................................................10
F. Kesimpulan.............................................................................................11
III. Kendala.........................................................................................................11
IV. Daftar Pustaka..............................................................................................12
2
OTOT RANGKA I dan II
I. PENDAHULUAN
Dasar Teori
Pemberian nama otot rangka disebabkan karena otot ini menempel pada sistem rangka (Seeley,
2002). Otot terdiri atas bundel-bundel sel otot. Setiap bundel berada di dalam lembaran jaringan
ikat yang membawa pembuluh darah dan saraf yang mensuplai kebutuhan otot tersebut. Di
setiap ujung otot, lapisan luar dan dalam dari jaringan ikat bersatu menjadi tendon yang biasanya
menempel pada tulang. (Tobin. 2005)
Otot rangka memiliki empat karakteristik fungsional sebagai berikut:
1. kontraktilitas; kemampuan untuk memendek karena adanya gaya
2. eksitabilitas; kapasitas otot untuk merespons sebuah rangsang
3. ekstensibilitas; kemampuan otot untuk memanjang
4. elastisitas; kemampuan otot untuk kembali ke panjang normal setelah mengalami
pemanjangan. (Seeley, 2002)
Potensial aksi merupakan depolarisasi dan repolarisasi membran sel yang terjadi secara
cepat. Pada sel otot (serabut-serabut otot), potensial aksi menyebabkan otot berkontraksi
(Seeley, 2002).
Sebuah potensial aksi tunggal akan menghasilkan peningkatan tegangan otot yang
berlangsung sekitar 100 milidetik atau kurang yang disebut sebuah kontraksi tunggal. Jika
potensial aksi kedua tiba sebelum respons terhadap potensial aksi pertama selesai, tegangan
tersebut akan menjumlahkan dan menghasilkan respons yang lebih besar. Jika otot menerima
suatu rentetan potensial aksi yang saling tumpang tindih, maka akan terjadi sumasi yang lebih
besar lagi dengan tingkat tegangan yang bergantung pada laju perangsangan. Jika laju
perangsangan cukup cepat, sentakan tersebut akan lepas menjadi kontraksi yang halus dan
bertahan lama yang disebut tetanus. (Campbell, 2004),
Intensitas (kuat) rangsang dapat dibedakan menjadi:
a. Sub minimal = sub liminal = sub threshold = di bawah ambang à rangsang terkecil yang
belum mampu menimbulkan respons
b. Minimal = liminal = threshold = ambang à rangsang terkecil yang mampu menimbulkan
respons
c. Sub maksimal à rangsang dengan intensitas yang bervariasi dari minimal sampai maksimal
d. Maksimal à rangsangan dengan intensitas terbesar (maksimal) dan hasil responsnya
maksimal
e. Supra maksimalà rengsang dengan intensitas lebih besar dari maksimal, tetapi respons
yang dihasilkan sama dengan maksimal
(Ellyzar I.M. Adil. 2009)
3
II. PELAKSANAAN & HASIL PRAKTIKUM
OTOT RANGKA I
Hubungan kekuatan rangsang dan tinggi mekanomiogram akibat kerutan otot
A. TUJUAN PERCOBAAN
1. Menggunakan alat stimulator induksi sehingga dapat merangsang sedian otot dengan
berbagai macam serta mencatat saat pemberian rangsang dengan menggunakan sinyal
magnit.
2. Membuat pencatatan kontraksi otot (mekaniomiogram) pada kimograf dan
memfiksasikannya.
3. Merangsang otot katak dengan beberapa macam kekuatan rangsang yakni rangsang:
Bawah rangsang (sub threshold), Ambang (threshold), Submaksimal, Supramaksimal.
4. Menarik kesimpulan dari hasil latihan ini tentang pengaruh kekuatan rangsang terhadap
kekuatan kontraksi otot.
B. ALAT DAN BAHAN
1. Kimograf + kertas + perekat
2. Statip + klem + pencatat otot + klem femur + batang kuningan
3. 2 buah sinyal maknit : 1 untuk mencatat waktuu, 1 untuk mencatat tanda rangsang
4. Stimulator induksi + elektroda perangsang + sakelar + kawat-kawat listrik.
5. Papan fiksasi + jarum pentul + penusuk katak + katak.
6. Benang + gelas alroji
7. Botol plastik berisi larutan Ringer + pipet + waskom kecil
C. TATA KERJA
1. Pasanglah semua alat
2. Buatlah sediaan otot menurut petunjuk umum.
3. Sebelum digunakan, bungkuslah sediaan otot tersebut dengan kapas yang dibasahi
dengan larutan ringer dan letakkan di gelas arloji
4. Pasanglah sediaan otot
5. Dengan tromol tetap diam, otot dirangsang sehingga terdapat suatu kerutan.
6. Pencatatan selalu dilakukan pada tromol yang diam.
7. Berilah waktu istirahat selama 15 detik sesudah tiap perangsangan. Putarlah tromol
sepanjang ½ cm pada tiap kali sesudah pemberian rangsang tutup dan 2 cm pada seiap
kali sesudah rangsang buka.
8. Rangsanglah sedian otot dengan rangsang tutup dan rangsang buka berturut-turut
dengan kekuatan rangsang yang setiap kali diperbesar 0,5 volt, sehingga didapatkan
mekaniomiogram sebagai hasil perangsangan bawah ambang, ambang, submaksimal,
dan supramaksimal.
4
D. HASIL PRAKTIKUM
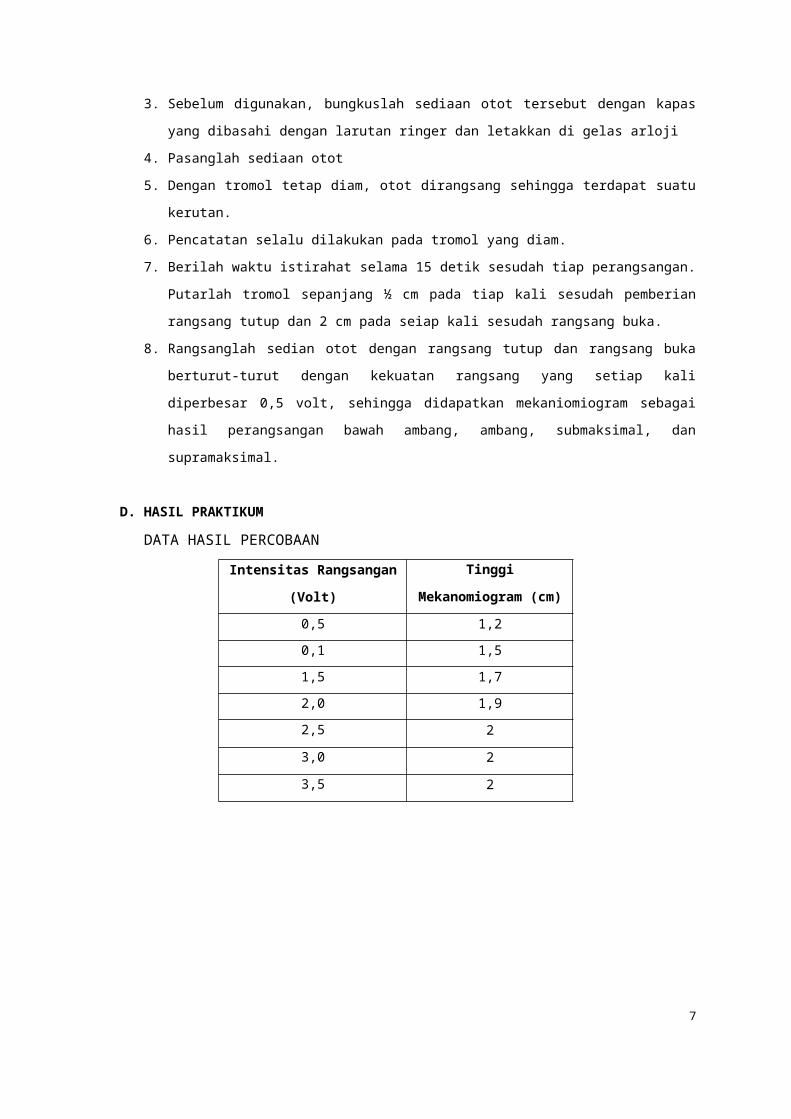
DATA HASIL PERCOBAAN
Intensitas Rangsangan
(Volt)
Tinggi Mekanomiogram
(cm)
0,5 1,2
0,1 1,5
1,5 1,7
2,0 1,9
2,5 2
3,0 2
3,5 2
HASIL ANALISA/DISKUSI
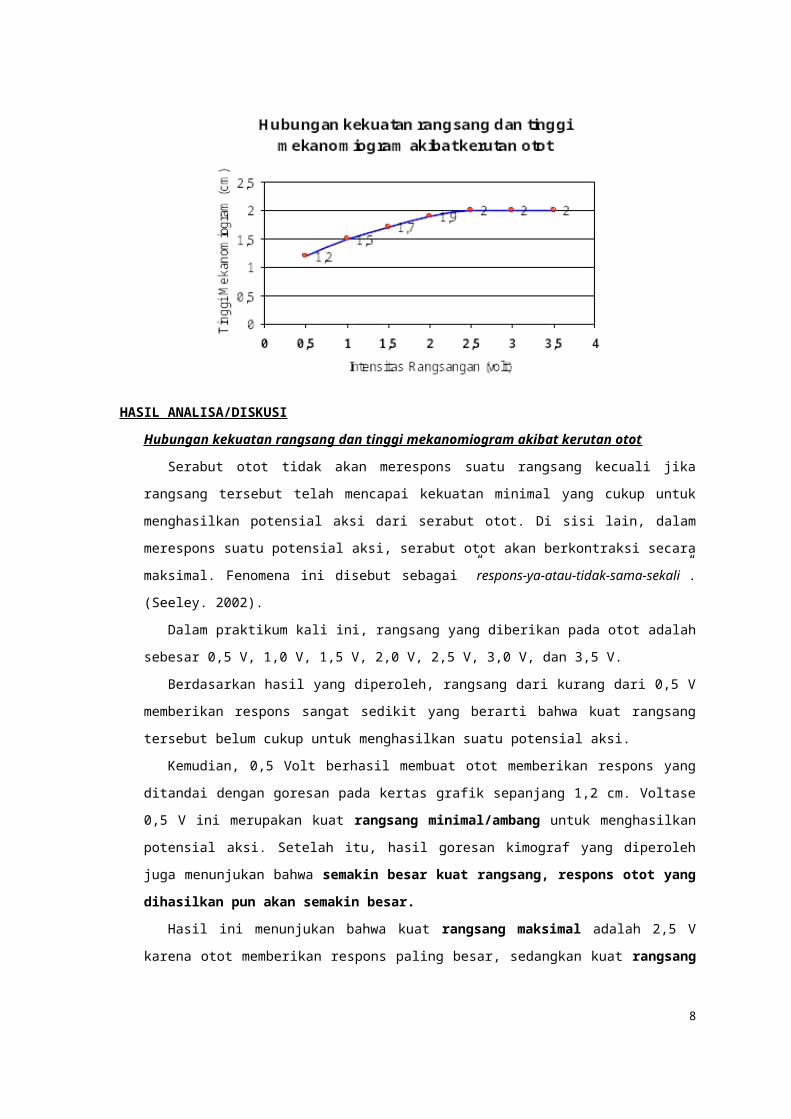
Hubungan kekuatan rangsang dan tinggi mekanomiogram akibat kerutan otot
Serabut otot tidak akan merespons suatu rangsang kecuali jika rangsang tersebut telah
mencapai kekuatan minimal yang cukup untuk menghasilkan potensial aksi dari serabut otot.
Di sisi lain, dalam merespons suatu potensial aksi, serabut otot akan berkontraksi secara
maksimal. Fenomena ini disebut sebagai ”respons-ya-atau-tidak-sama-sekali”. (Seeley.
2002).
Dalam praktikum kali ini, rangsang yang diberikan pada otot adalah sebesar 0,5 V, 1,0 V,
1,5 V, 2,0 V, 2,5 V, 3,0 V, dan 3,5 V.
Berdasarkan hasil yang diperoleh, rangsang dari kurang dari 0,5 V memberikan respons
sangat sedikit yang berarti bahwa kuat rangsang tersebut belum cukup untuk menghasilkan
suatu potensial aksi.
Kemudian, 0,5 Volt berhasil membuat otot memberikan respons yang ditandai dengan
goresan pada kertas grafik sepanjang 1,2 cm. Voltase 0,5 V ini merupakan kuat rangsang
minimal/ambang untuk menghasilkan potensial aksi. Setelah itu, hasil goresan kimograf
5
yang diperoleh juga menunjukan bahwa semakin besar kuat rangsang, respons otot yang
dihasilkan pun akan semakin besar.
Hasil ini menunjukan bahwa kuat rangsang maksimal adalah 2,5 V karena otot
memberikan respons paling besar, sedangkan kuat rangsang submaksimal adalah 2,0 V
dan rangsang supramaksimal adalah 3,0 V dan 3,5 V.
E. MENJAWAB PERTANYAAN
1. Manakah yang harus diselesaikan lebih dahulu, pemasangan alat atau pembuatan
sediaan otot?
Jawab : Pemasangan alat, supaya nanti bisa langsung mengerjakan percobaan pada
sediaan otot
2. Bila hasil pencatatan kontraksi otot sangat kecil, bagaimana memperbesarkannya?
Jawab : Dengan menaikkan intensitas rangsangan
3. Bila hanya sebagian kontraksi yang tercatat, apa yang harus diperhatikan/diperbaiki?
Jawab : Coba memberikan rangsangan lagi, namun harus diberi waktu istirahat sejenak
4. Mengapa harus diberi waktu untuk istirahat?
Jawab : Agar otot mengalami relaksasi sempurna sehingga hasil yang didapatkan
bukan penjumlahan kedutan
5. Apa yang disebut rangsang bawah ambang (subthreshold)?
Jawab : Rangsang terkecil yang belum mampu menimbulkan respons
6. Bagaimana kita dapat membedakan rangsang maksimal dengan supramaksimal?
Jawab : Rangsang maksimal à rangsangan dengan intensitas terbesar (maksimal) dan
hasil responsnya maksimal; Supramaksimalà rengsang dengan intensitas
lebih besar dari maksimal, tetapi respons yang dihasilkan sama dengan
maksimal. Dari pengertian ini bisa disimpulkan perbedaan bahwa
supramaksimal adalah rangsangan di atas maksimal dengan hasil respons
yang sama tetapi pemberian intensitas rangsangan lebih besar.
F. KESIMPULAN
Semakin besar kuat rangsang, respons otot yang dihasilkan pun akan semakin besar.
OTOT RANGKA II
A. TUJUAN PERCOBAAN
1. Merangsang sediaan otot katak dengan arus faradic dengan berbagai kekuatan
2. Membebani sediaan otot katak dengan cara pembebanan langsung dan tidak langsung
3. Mendemonstrasikan hubungan antara panjang awal otot dengan kekuatan kontraksi
4. Menghitung kerja sediaan otot katak
5. Mendemonstrasikan hubungan antara pembebanan dengan kerja otot
6. Mengukur kekuatan kontraksi otot ekstensor dan otot fleksor manusia dalam berbagai
sikap tubuh
6
B. ALAT DAN BAHAN
1. Kimograf + kertas + perekat
2. Statif + klem-klem + pencatat otot + klem femur
3. Stimulator induksi + elektroda perangsang
4. Papan fiksasi + jarum-jarum pentul + penusuk katak + katak
5. Beban-beban dengan penggantungnya
6. Benang + kapas + gelas arloji
7. Botol plastik berisi laturan ringer + pipet + Waskom + gelas beker
8. Dynamometer
C. TATA CARA
I. Pengaruh panjang awal (initial length) otot katak terhadap kekuatan kerutan
1. Pasanglah semua alat sesuai dengan gambar
2. Buatlah sediaan otot menurut petunjuk umum praktikum. Sebelum digunakan,
bungkuslah sediaan otot tersebut dengan kapas yang dibasahi dengan larutan ringer dan
letakkan di gelas arloji
3. Pasanglah sediaan otot sesuai dengan gambar
4. Bebanilah otot dengan beban seberat 20 gram. Kendorkan sekrup penumpu sehingga
terjadi pembebanan langsung. Dengan memutar tromol, buatlah garis sepanjang 10 cm
dan tulisah : “garis dasar 20” pada ujung akhir garis tersebut.
5. Angkatlah seluruh pembebanan sehingga otot kembali ke panjang semula. Buatlah sekali
lagi garis sepanjang 10 cm tepat di atas garis yang pertama dan tulislah: garis dasar 0
pada ujung akhir garis tersebut.
6. Gantungkanlah lagi beban 20 gram dan dengan sekrup penumpu kembalikan ujung
pencatat otot ke garis dasar 0, sehingga terjadi pembebanan tidak langsung.
7. Dengan melakukan pencatatan pada awal garis dasar 0 carilah kekuatan rangsang
faradic maksimal. Rangsangan diberikan paling lama 1 detik. Berilah waktu istirahat
selama 30 detik sesudah setiap rangsang.
8. Gunakan selalu kekuatan rangsang faradic maksimal sub.6. untuk perangsangan
selanjutnya.
9. Putarlah tromol sejauh 1 cm setiap kali sesudah perangsangan. Carilah besar
pembebanan yang pada perangsangan menghasilkan mekanomiogram setinggi 1 cm.
untuk percobaan selanjutnya tetap digunakan beban ini
10. Putarlah tromol sejauh 2 cm dan catatlah sekali lagi mekaniomiogram yang terakhir
11. Putarlah tromol sejauh 1 cm dan kemudian turunkanlah ujung pencatat otot sehingga
terletak tepat ditengah-tengah antara garis dasar 20 dan garis dasar 0 (gunakan sekrup
penumpu). Putarlah lagi tromol sejauh 1 cm dan ulangilah perangsangan dan pencatatan.
12. Putarlah tromol sejauh 1 cm dan turunkanlah ujung pencatat otot sampai garis dasar 20,
putar tromol lagi sejauh 1 cm dan ulangilah sekali lagi perangsangan dan pencatatan
7
II. Pengaruh beban terhadap kerja otot
1. Buatlah garis dasar 0 yang baru sepanjang mungkin
2. Dengan menggunakan kekuatan rangsang sebesar ad.I.6 buatlah mekanomiogram pada
tromol yang diam. Pencatatan selalu dimulai pada garis dasar 0 dengan mengatur sekrup
penumpu
3. Ulangi perangsangan dan pencatatan, dimulai dengan pembebanan 10 gram, sehingga
dicapai beban maksimal. Setiap kali setelah pencatatan, putarlah tromol sepanjang 1 cm
dan berilah otot istirahat selama 30 detik.
4. Hitunglah kerja sediaan otot pada setiap pembebanan yang saudara berikan
5. Simpulkan pengaruh beban terhadap kerja otot
III . P engaruh regangan terhadap kekuatan kerutan otot ekstensor dan fleksor pada
manusia
1. Mengukur kekuatan kerutan otot ekstensor
a. Suruh o.p duduk dipinggir meja alat tersebut dengan membelakangi timbangan dan
dengan tungkai bawahnya tergantung secara bebas
b. Pasanglah ban kulit pada salah satu pergelangan kaki dan hubungkanlah ban kulit
tersebut, dengan kawat baja yg dapat menarik timbangan melalui katrol
c. Suruhlah o.p meluruskan tungkainya sekuat tenaga dan catatlah kekuatan kerutan
otot ekstensor untuk tiap-tiap sikap berikut ini :
1) Duduk tegak
2) Duduk sambil membungkukkan badan sejauh-jauhnya
3) Berbaring telentang
2. Mengukur kekuatan kerutan otot fleksor
a. Suruhlah o.p duduk dipinggir meja alat tersebut dengan menghadapi timbangan dan
dengan tungkai bawah tergantung secara bebas
b. Pasanglah ban kulit seperti pada A.2
c. Suruhlah o.p membengkokkan tungkainya sekuat tenaga dan catatlah kekuatan
kerutan otot fleksor untuk tiap-tiap sikap seperti pada 1.c
D. HASIL PRAKTIKUM
1. DATA HASIL PERCOBAAN
I. Pengaruh panjang awal ( Initial Length) otot katak terhadap kekuatan kerutan
Beban Langsung: skrup dilonggarkan
10 gr dengan rangsangan 0,5-2,5 V à tidak/sangat sedikit memberikan respons
10 gr dengan rangsangan 3,0-4,0 V à memberikan respons yang ditandai dengan
goresan pada kertas grafik sepanjang dengan panjang yang sama yaitu 0,5 cm à
3,0 V adalah rangsang maksimal
20 gr dengan rangsangan 0,5-3,5 V à tidak/sangat sedikit memberikan respons
20 gr dengan rangsangan 4,0 V à memberikan respons yang ditandai dengan
goresan pada kertas grafik sepanjang 0,2 cm
8
Beban Tidak Langsung: skrup tidak dilonggarkan
Dengan beban 10 gr tidak memberikan respons
II. Pengaruh beban terhadap kerja otot
Ditinjau dari besarnya berat dengan pemberian rangsangan maksimal:
10 gr à 0,5 cm
20 gr à 0,2 cm
30 gr à tidak memberikan respons à beban maksimal adalah 20 gr
III. Pengaruh regangan terhadap kekuatan kerutan otot ekstensor dan fleksor pada
manusia
Tabel hasil pengamatan otot ekstensor
Posisi Rizky Ayu
a. Duduk tegak 10 kg 9.5 kg
b. Duduk sambil membungkukan
badan sejauh-jauhnya5.5 kg 5 kg
c. Berbaring telentang 18 kg 23 kg
Tabel hasil pengamatan otot fleksor
Posisi Rizky Ayu
a. Duduk tegak 9 kg 8 kg
b. Duduk sambil membungkukan
badan sejauh-jauhnya8 kg 7 kg
c. Berbaring telentang 9 kg 9 kg
Kekuatan kerutan yang paling besar dalam posisi berbaring
2. HASIL ANALISA/DISKUSI
I. Pengaruh panjang awal ( Initial Length) otot katak terhadap kekuatan kerutan
Pada percobaan ini, otot dibuat bekerja pada dua kondisi, yaitu:
A. ”pembebanan tidak langsung”
B. ”pembebanan langsung”
Pada kondisi A, otot tidak dibiarkan memanjang pada saat pemberian beban karena
adanya tumpuan, sedangkan pada B ketiadaan tumpuan menyebabkan otot dapat
memanjang pada saat beban ditambahkan.
Berdasarkan hukum Starling yang berbunyi ”Kuat kontraksi otot berbanding
lurus dengan panjang mula-mula otot tersebut”, maka jelas kerja otot yang dihasilkan
pada keadaan B akan lebih besar daripada kerja otot yang dihasilkan pada keadaan A.
Hasil yang didapat dalam percobaan ini sudah sesuai dengan hukum Starling, dimana
pada ”pembebanan langsung” kekuatan otot yang dihasilkan lebih besar daripada
kerja otot pada ”pembebenan tidak langsung”.
9
II. Pengaruh beban terhadap kerja otot
Beban (gr) Jarak pengangkatan (cm)
10 0,5
20 0,2
30 tidak ada respons
Dari hasil di atas, kerja otot dapat dihitung dengan menggunakan rumus:
W = F x S,dengan W = kerja otot, F = Gaya = beban x gravitasi, dan
S = Jarak pengangkatan; 20 gr merupakan beban maksimal
Berat Beban = B
(kg)
Gaya
(Bx10 m/s)
Jarak Pengangkatan = S
(m)
Kerja Otot = W
(Joule)
0,01 0,1 0,005 0,0005
0,02 0,2 0,002 0,0004
Dari hasil di atas dapat terlihat bahwa semakin berat beban semakin rendah kerja otot
Beban juga merupakan penentu penting untuk kecepatan pemendekan. Semakin besar
beban, semakin rendah kecepatan serat-serat otot memendek. Kecepatan pemendekan
maksimum apabila tidak terdapat beban eksternal dan menurun secara progresif seiring
dengan peningkatan beban, dan menjadi nol (tidak ada pemendekan) apabila beban
tidak dapat diatasi oleh ketegangan maksimum (Sherwood, 2001) → analisis: semakin
berat bebannya → semakin sedikit pemedekan otot → semakin kecil kerja otot
III. Pengaruh regangan terhadap kekuatan kerutan otot ekstensor dan fleksor pada
manusia
Pada saat otot relaksasi yakni dalam posisi berbaring, maka semakin kuat ototnya, baik
itu ekstensor ataupun fleksor. Karena dalam posisi berbaring tubuh menyimpan kekuatan
yang lebih besar untuk melawan regangan yang besar. Sehingga semakin besar
regangan, semakin besar kekuatan kerutan ototnya.
E. MENJAWAB PERTANYAAN
I. Pengaruh panjang awal ( Initial Length ) otot katak terhadap kekuatan kerutan
1. Manakah yang harus diselesaikan lebih dahulu, pemasangan alat atau pembuatan
sediaan otot?
Jawab : Pemasangan alat, supaya nanti bisa langsung mengerjakan percobaan pada
sediaan otot
2. Apa yang dimaksud dengan pembebanan langsung?
Jawab : Beban diberikan langsung pada ujung otot yang bebas dan otot diregang
sebelum berkontraksi
3. Mengapa setelah beban diangkat otot kembali ke panjang semula?
Jawab : Karena pembebanan langsung tadi menyebabkan panjang otot bertambah
10
4. Apa yang dimaksud dengan pembebanan tidak langsung?
Jawab : Beban diberikan pada ujung otot yang terfiksasi dengan penumpu dan otot tidak
diregang sebelum berkontraksi
5. Mengapa harus diberikan waktu untuk istirahat?
Jawab : Agar otot mengalami relaksasi sempurna sehingga hasil yang didapatkan bukan
penjumlahan kedutan
6. Apa yang dimaksud dengan rangsang faradic maksimal?
Jawab : Rangsangan dengan intensitas terbesar (maksimal) dan hasil responsnya
maksimal
II. Pengaruh beban terhadap kerja otot
1. Apa yang dimaksud dengan beban maksimal?
Jawab: Beban dengan berat maksimal yang mampu ditumpu oleh otot
2. Bagaimana saudara menghitung besar kerja sediaan otot?
Jawab: Melalui persamaan W = F.s
III. Pengaruh regangan terhadap kekuatan kerutan otot ekstensor dan fleksor pada
manusia
Apakah terdapat perbedaan kekuatan kerutan otot ekstensor dan fleksor pada sikap
tersebut?
Jawab:
Ada karena sikap duduk, menunduk, dan berbaring memberikan tegangan kontraksi otot
yang berbeda.
F. KESIMPULAN
Kuat kontraksi otot berbanding lurus dengan panjang mula-mula otot tersebut. Pada
”pembebanan langsung” kekuatan otot yang dihasilkan lebih besar daripada kerja otot pada
”pembebenan tidak langsung”. Semakin berat bebannya → semakin sedikit pemedekan otot
→ semakin kecil kerja otot. Semakin besar regangan, semakin besar kekuatan kerutan otot
nya.
III. Kendala
Waktu yang diberikan kurang mencukupi karena harus bergilir dengan yang lain
Dosen pembimbing saat praktikum hanya 1 (waktu itu karena praktikum pertama dan pagi-
pagi) sehingga sulit untuk bertanya apabila mengalami kebingungan mengenai alat dan
masing-masing fungsinya serta mekanisme nya
Kerjasama kelompok masih kurang sehingga sulit untuk mengkoordinasi apa-apa yang harus
dilakukan
Kurang mengerti maksud dari tata cara nya meskipun dibaca berulang kali, sehingga
langkah-langkah yang dilakukan sulit/ masih tidak sesuai dengan instruksi
11
DAFTAR PUSTAKA
Campbell, N.A., J.B. Reece, L.G. Mitchell. 2004. Biologi edisi kelima jilid 3. Jakarta: Erlangga
Mitchell, P.H. 1956. A Textbook of General Phisiology. New York : McGraw-Hill Book Company, Inc.
Seeley, R.R., T.D. Stephens, P. Tate. 2003. Essentials of Anatomy and Physiology fourth edition.
McGraw-Hill Companies
The Staff. 1958. Experimental Phisiology third edition. Minnesota: Burgess Publishing Company
Tobin, A.J. 2005. Asking About Life. Canada: Thomson Brooks/Cole,
Pamuji Laksono, S. 2007. Sistem Muskuloskeletal. Jakarta
Sherwood, L. 2001. Fisiologi Manusia: dari Sel ke Sistem, edisi 2, ab. Brahm U. Pendit. Jakarta: EGC
12