kinesiologi dan biomekanika
TRANSCRIPT
KINESIOLOGI DAN BIOMEKANIKAKINESIS - GERAK
KINESIOLOGI
LOGOS –
PENGETAHUAN
PELAJARAN ILMIAH GERAK MANUSIA
Agar Efisien dan Efektif Penampilan Tubuh
- Fungsi Mekanik - Biomekanika, Anatomi,
- Fungsi Biologi - Fisiologi saraf otot
Anatomi ; Fisiologi ; Fisika dan Matematika
KINESIOLOGI DAN
BIOMEKANIKAPOKOK BAHASAN
1. Sistem Otot
2. Gerakan Kerangka
3. Pengontrolan Saraf Gerak
4. Penggunaan Otot yang Khusus
5. Gerak Otot Tungkai Atas
6. Gerak Otot Togok dan Leher
7. Gerak Otot Tungkai Bawah
8. Meningkatkan Keefektifan Otot
9. Lever dan Mesin Sederhana
10. Gerak
11. Kekuatan (Force)
12. Proyeksi
13. Keseimbangan
14. Analisis Mekanika dari Ketangkasan
KINESIOLOGI DAN
BIOMEKANIKASISTEM OTOT
- Exitability = dapat menerima dan
menjawab rangsang
- Contractability = Berubah bentuk
sebagai hasil rangsangan pendek
dan tebal
- Extensibility = dapat dibentangkan
- Elasticity = siap kembali ke panjangnya
yang normal
KINESIOLOGI DAN
BIOMEKANIKA
3 MACAM JARINGAN OTOT
1. OTOT RANGKA
2. OTOT JANTUNG
3. OTOT HALUS
KINESIOLOGI DAN
BIOMEKANIKA
OTOT JANTUNG
Karakteristiknya :
(1). Mereka Bebas
(2). Bergaris, sama dengan otot rangka
(3). Disusun dalam syncytia, kelihatan
dihubungkan satu dengan yang lain
KINESIOLOGI DAN
BIOMEKANIKA Perbedaan secara fisiologis dengan otot
rangka(1) Otot rangka secara normal bereaksi
bila dirangsang – otot jantung bereaksisecara tetap berirama, tanpa menerimaimpul-impul saraf
(2) Kecepatan depolarisasi (waktu yang diperlukan untuk relaksasi) - otot jantung 3/10 detik- otot rangka 1/500 detik
KINESIOLOGI DAN
BIOMEKANIKA OTOT HALUS
Dikontrol diluar kemampuan sistem saraf
(ototmatis)
- Otot nampak halus
- Langsing dan meruncing ke arah kedua
ujung
- Diketemukan pada pembuluh darah,
usus, saluran pencernaan dan perut
KINESIOLOGI DAN
BIOMEKANIKAKarakteristik otot halus
1. Otot halus sekitar pupil mata berbeda
jenis dengan otot halus dalam dinding
perut (funsi berbeda)
2. Kontraksi otot halus mendorong isi
yang lebih dalam (saluran
pencernaan)
3. Jika terjadi tambahan kontraksi –
dalam pembuluh darah- tekanan darah
meningkat
KINESIOLOGI DAN
BIOMEKANIKA OTOT BERGARISUntuk aktivitas berjalan, lari, jinjit, memanjat,
melompat, mengayun, melempar objek, bernafas dan melakukan berbagai gerakanyang lain.
STRUKTUR OTOT RANGKABentuk panjang dan langsing
ada yang pendekgemukbundartipisberbentuk seperti kipas
KINESIOLOGI DAN
BIOMEKANIKA UNICEPS Meruncing hanya ke satu
tendon pada tiap ujungnya
BICEPS (Berkepala Dua) bila
salah satu ujungnya membentuk dua
ujung yang runcing
TRICEPS Berkepala tiga
KINESIOLOGI DAN
BIOMEKANIKA OTOT RANGKA dibungkus epimisium
BUNDLE Perimysium
MUSCLE FIBER Endomysium Sarcolema
MYOFIBRIL
ACTIN MYOSIN
KONTRAKSI OTOT
KINESIOLOGI DAN
BIOMEKANIKAKLASIFIKASI STRUKTUR OTOT
FUSIFORM (LONGITUDINAL)
MENGUNTUNGKAN UNTUK KECEPATAN
PENI FORM (DIAGONAL)
MENGUNTUNGKAN UNTUK KEKKUATAN
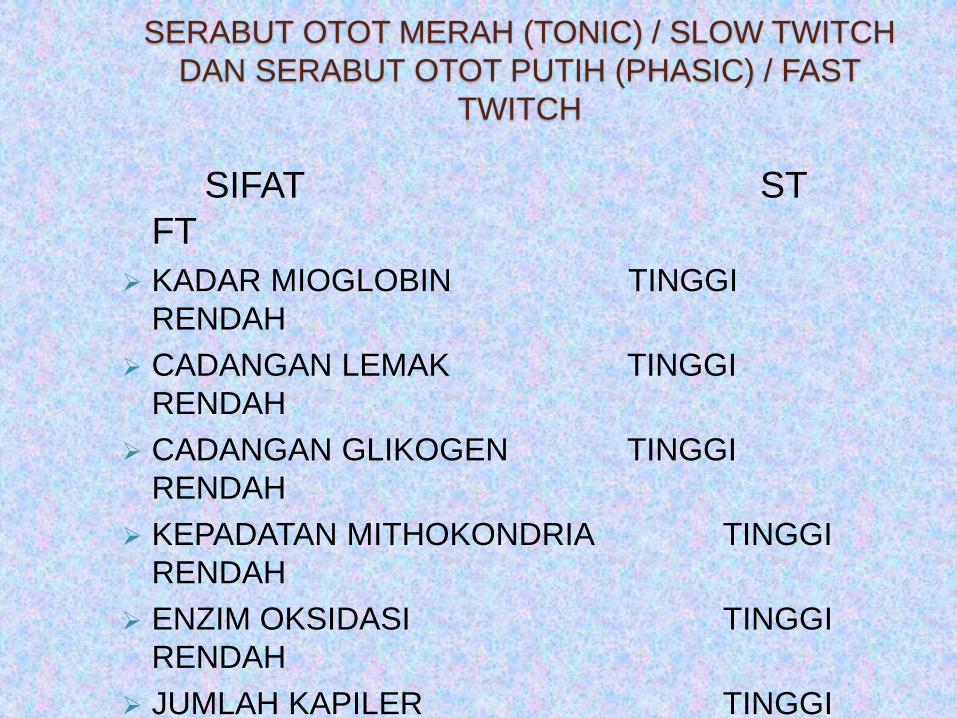
SERABUT OTOT MERAH (TONIC) / SLOW TWITCH
DAN SERABUT OTOT PUTIH (PHASIC) / FAST
TWITCH
SIFAT ST
FT
KADAR MIOGLOBIN TINGGI
RENDAH
CADANGAN LEMAK TINGGI
RENDAH
CADANGAN GLIKOGEN TINGGI
RENDAH
KEPADATAN MITHOKONDRIA TINGGI
RENDAH
ENZIM OKSIDASI TINGGI
RENDAH
JUMLAH KAPILER TINGGI
RENDAH
KINESIOLOGI DAN
BIOMEKANIKAIKATAN-IKATAN OTOT
OTOT DIIKAT PADA TULANG OLEH TENDONATAU APONEOROSES (BENANG-BENANGSERABUT)
ORIGO DAN INSERTIO
ORIGO = IKATAN DEKAT GARIS TENGAH TUBUHPADA TULANG YANG LEBIH STABIL. PERUTOTOT BIASANYA LEBIH DEKAT DENGAN ORIGO.
INSERTIO = IKATAN KE UJUNG (DISTAL)DIMANA SISTEM RANGKA LEBIH SIAPDIGERAKKAN DAN UJUNG TENDON BIASANYALEBIH PANJANG.
MACAM-MACAM KONTRAKSI
OTOTKONTRAKSI KONSENTRIK = OTOT
MEMENDEK
KONTRAKSI EKSENTRIK = OTOT MEMANJANG
KONTRAKSI ISOTONIK (DINAMIK ATAU FASIK) = KONTRAKSI KONSENTRIK DAN EKSENTRIK PADA DASARNYA ISOTONIK.
KONTRAKSI ISOMETRIK (STATIK ATAU TONIK) = OTOT BERUSAHA MEMENDEK TETAPI TIDAK DAPAT MENGATASI TAHANAN
KARAKTERISTIK PENTING OTOT
RANGKA
(1) BERKONTRAKSI DENGAN
KEKUATAN YANG PENUH UNTUK
GERAKAN YANG KUAT
(2) BERKONTRAKSI SECARA CEPAT
UNTUK GERAKAN YANG CEPAT
(3) MENAHAN KONTRAKSI YANG
DIULANGI
(4) MENYISAKAN TONUS DALAM
KEADAAN BAIK
KEKUATAN KONTRAKSI DIHUBUNGKAN DAN
DIPENGARUHI OLEH
UKURAN (PENAMPANG MELINTANG) OTOT DAPAT DITINGKATKAN DARI =
- PERTUMBUHAN NORMAL
- PENAMBAHAN BEBAN SECARA SISTEMATIS
PROPOSI SERABUT YANG AKTIF
AKTIF + TIDAK AKTIF DIAKTIFKAN (LATIHAN) SERABUT YANG AKTIF MENINGKAT
KECEPATAN KONTRAKSI
KEKUATAN KONTRAKSI DIHUBUNGKAN DAN
DIPENGARUHI OLEH
DAYA TAHAN OTOT OTOT
DAPAT KEMAMPUAN UNTUK
MENAHAN KELELAHAN
DIPENGARUHI =
- KEKUATAN KONTRAKSI
- EFISIENSI DAN SIRCULORESPIRATORI
- KEMAMPUAN SISTEM SYARAF DALAMMELAYANI KONTRAKSI
TONUS = KUALITAS YANG MEMBERIKANPENGOKOHAN DAN BENTUK YANG SESUAIPADA OTOT
GERAK KERANGKA
208 TULANG
SISTEM KERANGKA
200 SENDI
- TULANG TENGKORAK = 8
- TULANG MUKA = 14
- TULANG TELINGA = 6
- TULANG GERAHAM = 1
- TULANG BELAKANG = 26
- TULANG DADA & RUSUK = 25
- TULANG ANGGOTA ATAS = 64
- TULANG ANGGOTA BAWAH = 64
FUNGSI KERANGKA
(1) MEMBERI BENTUK DAN STRUKTUR
TUBUH
(2) MELINDUNGI ORGAN BAGIAN
DALAM
(3) MENGHASILKAN SEL DARAH
(4) MENYEDIAKAN KALSIUM DAN
FOSFOR
(5) MELAYANI SEBAGAI TUAS DAN
SENDI PADA GERAK TUBUH
KLASIFIKASI TULANG
TULANG PANJANG DIJUMPAI PADA LENGAN DAN TUNGKAI. DIRANCANG UNTUK GERAKAN MENYAPU
TULANG PENDEK DIJUMPAI PADA CARPALS; TARSALS; PATELAE. MEMBANTU GERAKAN, BERPERAN MENGURANGI BERAKSINYA TULANG PANJANG.
TULANG CEPER DIJUMPAI PADA TULANG DADA; TENGKORAK. MELAYANI TUJUAN GERAK YANG KECIL DAN MELINDUNGI ORGAN YANG PENTING.
TULANG TAK BERATURAN CONTOH PADA TULANG BELAKANG (VERTEBRAE), TULANG TELINGA DAN TULANG MUKA
SENDI TUBUH
SISTEM KERANGKA DIMANA DUA BUAH TULANG ATAULEBIH DIKETEMUKAN
SENDI YANG TIDAK DAPAT DIGERAKKAN MELAYANISEBAGAI PERLINDUNGAN
SENDI YANG DAPAT DIGERAKKAN SEDIKIT.STRUKTUR TULANG DAN JARINGAN PENGHUBUNGDI DALAM DAN SEKELILING SENDI MEMBATASILUASNYA DAERAH GERAK HANYA SAMPAI BEBERAPADERAJAD. DITEMUKAN PADA TULANG BELAKANG;ANTARA SACRUM DAN ILIAC; PERTAUTAN TULANGTULANG RUSUK
SENDI YANG DAPAT DIGERAKKAN DENGAN BEBASRELATIF MEMILIKI RUANG GERAK YANG LUAS DANSANGAT PENTING DALAM PENAMPILAN GERAK.CONTOH : SENDI BAHU, SIKUT, PERGELANGAN,PANGGUL DAN SENDI LUTUT.
STRUKTUR SENDI
SENDI YANG DAPAT DIGERAKKANDENGAN BEBAS DIBANGUN KHUSUSUNTUK MENGIZINKAN MENYAPUDENGAN BEBAS LUAS DAN CEPAT
PERMUKAAN PERSENDIAN DITUTUPLAPISAN CARTILAGE UNTUKMENCEGAH PEMAKAIAN LANGSUNGTULANG DAN PENYERAPAN GERAK
TULANG DIIKAT OLEH LIGAMENYANG MENUTUPI DENGAN LENGKAPSENDI DAN MENGIKAT DENGANKOKOH SEMUA JALAN SEKITARKEDUA TULANG
STRUKTUR SENDI
BAGIAN DALAM LIGAMEN DIBATASI
OLEH MEMBRAN YANG
MENGELUARKAN ZAT CAIR UNTUK
MENJAGA SENDI BERMINYAK
OTOT ATAU TENDONNYA
MEMBENTANG MENYEBRANGI
SENDI MEMBANTU LIGAMEN
MENAHAN SENDI AGAR TIDAK
TERGELINCIR (DISLOKATING)
JENIS STRUKTUR SENDI
1. SENDI PELUNCUR (GLIDING JOINT)
PADA TULANG CARPAL DAN TARSAL
2. SENDI ENGSEL (HINGE JOINT)
PADA SIKUT, DAN PALANGES (JARI-JARI). HANYA UNTUK FLEKSI DAN EKTENSI
3. SENDI BUJUR TELUR (CONDYLOID JOINT)
PADA ANTARA META CARPALE DAN PALANGES (KECUALI IBU JARI)
4. SENDI PELANA (SADDLE JOINT)
PADA CARPAL DAN META CARPAL IBU JARI TANGAN
JENIS STRUKTUR SENDI
5. SENDI PUTAR (PIVOT JOINT)
CINCIN BERBENTUK TULANG YANG MEMUTAR SEBUAH TONJOLAN GERAK ROTASI
CONTOH : PADA PROXIMAL RADIUS DENGAN CAPUT HUMERUS
6. SENDI PELURU
BERBENTUK BUNDAR YANG DISISIPKAN DALAM RONGGA CEKUNG. MENGHASILKAN BERMACAM-MACAM GERAKAN YANG LEBIH BESAR DAN LUAS DAERAH GERAKNYA. GERAKAN SUDUT KE SEMUA ARAH.
CONTOH : SENDI BAHU DAN PANGGUL.
LUASNYA DAERAH GERAK
BANYAKNYA GERAK MELALUI DATAR UTAMA YANG TERJADI DALAM SEBUAH SENDI YANG DINYATAKAN DALAM DERAJAD TERGANTUNG PADA 3 FAKTOR :
(1) STRUKTUR TULANG ITU SENDIRI(2) BANYAKNYA OTOT DAN JARINGAN
SEKITAR SENDI, YANG DAPAT MENYEMPURNAKAN GERAKAN.
(3) ELASTISITAS OTOT, TENDON, DAN LIGAMEN SEKITAR SENDI.
MACAM-MACAM GERAK
SENDIFLEXION (MEMBENGKOK) ADALAH :
GERAK RUAS TUBUH YANG MENYEBABKAN PENGURANGAN SUDUT SENDI, SEPERTI MEMBENGKOKKAN LENGAN PADA SIKUT, ATAU BETIS PADA LUTUT.
EXTENSION (MELURUSKAN) ADALAH:GERAKAN KE ARAS SEBALIKNYA DARI FLEXION YANG MENYEBABKAN PENAMBAHAN SUDUT SENDI MISAL : MELURUSKAN SIKUT ATAU LUTU

MACAM-MACAM GERAK
SENDIABDUCTION
ADALAH GERAK RUAS TUBUH DALAM DATAR SAMPING MENJAUH DARI GARIS TENGAH TUBUH. SEPERTI MENAIKKAN BETIS ATAU LENGAN KE SAMPING.
ADDUCTIONADALAH GERAK RUAS TUBUH KE ARAH GARIS TENGAH SEPERTI MENGGERAKKAN LENGAN DARI POSISI OUTWARD HORISONTAL KE POSISI VERTIKAL
MACAM-MACAM GERAK
SENDI ROTATION
ADALAH RUAS MENGELILINGI SUMBU LONGITUDINALNYA SENDIRI.
PRONATION
PERPUTARAN TANGAN DAN LENGAN KE BAWAH MENGHASILKAN POSISI ‘TELAPAK KE BAWAH’
SUPINATION
PERPUTARAN TANGAN DAN LENGAN KE ATAS MENGHASILKAN POSISI ‘TELAPAK KE ATAS’
MACAM-MACAM GERAK
SENDI INVERSION
PERPUTARAN KAKI MEMUTARKAN TAPAK KAKI (SOL) KE ARAH DALAM
EVERSION
PERPUTARAN KAKI MEMUTARKAN TAPAK KAKI (SOL) KE ARAH LUAR
CIRCUMDUCTION
ADALAH GERAKAN MELINGKAR ATAU SEPERTI KERUCUT DARI RUAS TUBUH. MISAL MENGAYUNKAN LENGAN DALAM GERAKAN MELINGKAR DARI SENDI BAHU.
MACAM-MACAM GERAK
SENDIELEVATION
MENGANGKAT BAHU
DEPRESSION
MERENDAHKAN GELANG BAHU
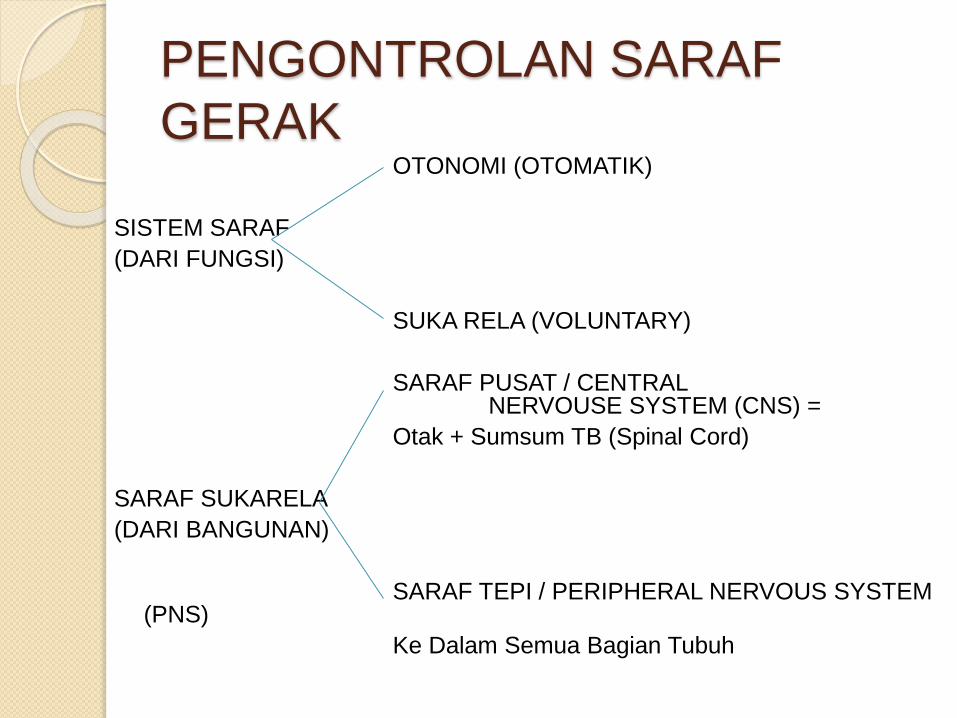
PENGONTROLAN SARAF
GERAKOTONOMI (OTOMATIK)
SISTEM SARAF
(DARI FUNGSI)
SUKA RELA (VOLUNTARY)
SARAF PUSAT / CENTRAL NERVOUSE SYSTEM (CNS) =
Otak + Sumsum TB (Spinal Cord)
SARAF SUKARELA
(DARI BANGUNAN)
SARAF TEPI / PERIPHERAL NERVOUS SYSTEM (PNS)
Ke Dalam Semua Bagian Tubuh
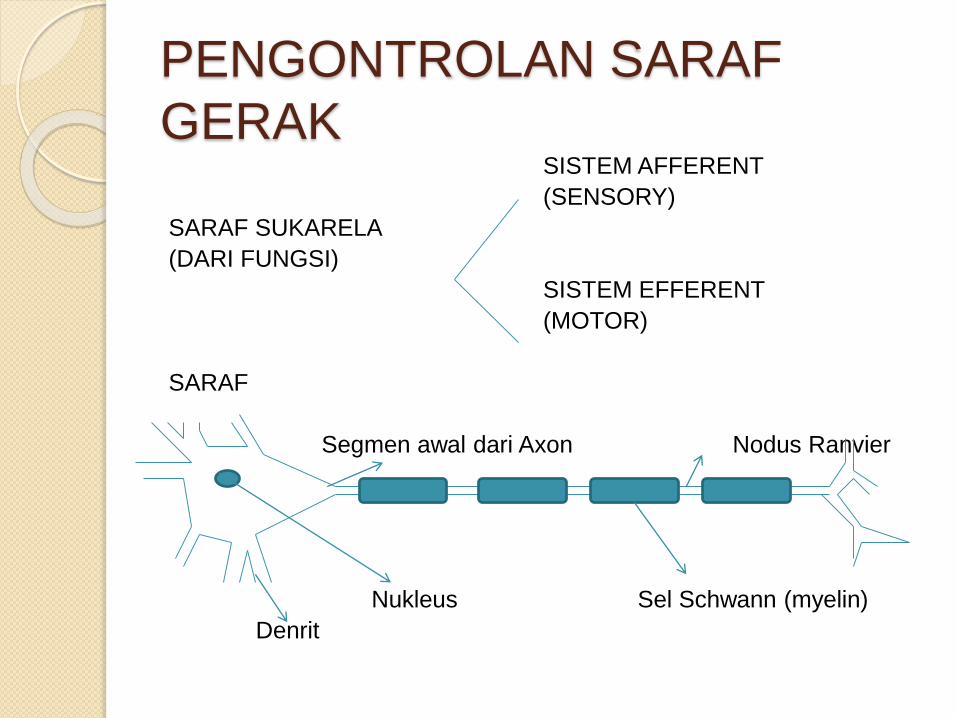
PENGONTROLAN SARAF
GERAKSISTEM AFFERENT
(SENSORY)
SARAF SUKARELA
(DARI FUNGSI)
SISTEM EFFERENT
(MOTOR)
SARAF
Segmen awal dari Axon Nodus Ranvier
Nukleus Sel Schwann (myelin)
Denrit
PENGONTROLAN SARAF
GERAKPADA SERABUT BERMYELIN IMPULSDIKONDUKSIKAN DARI NODUS KENODUS DINAMAI SEBAGAI ‘KONDUKSISALTATORIS’
‘SALTATORIS‘ ARTINYA ‘MELOMPAT’
IMPULS PERUBAHANPOTENTIAL
(POTENTIAL AKSI)
INFORMASI YANG DIUBAHMENJADI BENTUK YANG
DAPAT DIHANTARKANSARAF

PENGONTROLAN SARAF
GERAKKECEPATAN KONDUKSI DIPENGARUHI :
DIAMETER SERABUT
ADA TIDAKNYA MYELIN
SUHU
RECEPTORS (PENERIMA)
STIMULUS RECEPTORS SARAF SENSORISARAF PUSAT
ORGAN2 EFEKTOR SARAF MOTORIK MEMORI
/DIRESPON

PENGONTROLAN SARAF
GERAKKLASIFIKASI RECEPTOR
Exteroceptors
(Panca Indra)
RESEPTOR
Visceroreceptors
Introceptors (otot polos)
(Sensasi; Sakit;
tekanan & tega-
ngan Proprioreceptors
(otot rangka)
keadaan posisitubuh
PENGONTROLAN SARAF
GERAKWAKTU REAKSI
INTERVAL WAKTU DIANTARA TANDA
MENJAWAB RANGSANG DAN
MEMULAI JAWABAN
REFLEKS
SISTEM AFFERENT DAN RESPON
EFFERENT TERJADI SEBELUM
ORGANISME MENYADARI
RANGSANGAN
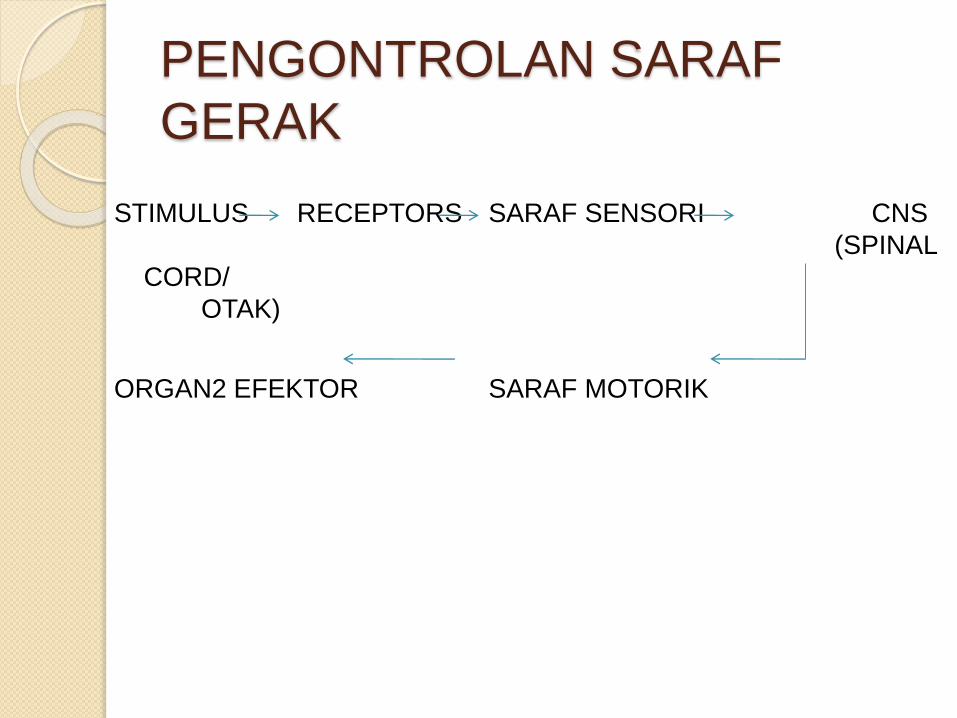
PENGONTROLAN SARAF
GERAK
STIMULUS RECEPTORS SARAF SENSORI CNS
(SPINAL
CORD/
OTAK)
ORGAN2 EFEKTOR SARAF MOTORIK
PENGGUNAAN OTOT YANG
KHUSUSPERANAN OTOT
SEBAGAI AGONIST; ANTAGONIST; STABILIZER; NEUTRALIZER
OTOT DAPAN BERUBAH PERAN DARI SATU PERAN KE PERAN YANG LAIN
PERAN AGONIST (MOVER) :
SEBUAH OTOT ADALAH PENGGERAK BILA KONTRAKSI KONSENTRIKNYA MENYOKONG GERAKAN RUAS TUBUH YANG DIINGINKAN.
CONTOH : FLEKSI SIKUT BICEPS BRACHII SEBAGAI
AGONIST
PENGGUNAAN OTOT YANG
KHUSUS
PRIMER MOVERS MENYOKONG
PERAN AGONIST
ASSISTANT MOVERS MEMBANTU
CONTOH :
MERUPAKAN PRIME MOVERS
DALAM EKSTENSI SIKUT
TRICEPS BRACHII
HANYA MERUPAKAN PENGGERAK
PEMBANTU (ASSISTANT M)
DALAM ABDUKSI BAHU
PENGGUNAAN OTOT YANG KHUSUS
PERAN ANTAGONISTADALAH OTOT HARUS RILAKS UNTUK MENGIZINKAN GERAKAN TERJADI
CONTOH :FLEKSI SIKUT TRICEPS BRACHII
ADALAH ANTAGONISTIC
PADA UMUMNYA FLEKSOR DAN EKSTENSOR; ABDUKTOR DAN ADDUKTOR ANTAGONISTIC
PENGGUNAAN OTOT YANG
KHUSUSPERAN STABILIZER (FIXATOR)
AGAR SEBUAH RUAS TUBUH BERGERAK, BAGIAN BADAN DIMANA RUAS BERGERAK MEMPENGARUHI STABILITAS
CONTOH : GERAKAN OTOT PERUT SELAMA PUSH-UP DI LANTAI
PERAN NEUTRALIZER
BILA OTOT MENGHAPUSKAN GERAKAN OTOT YANG LAIN
CONTOH :
PECTORALIS MAJOR- MEMFLEKSI HUMERUS
ADDUKSI HUMERUS
LATISIMUS DORSI
MELURUSKANNYA
PENGGUNAAN OTOT YANG KHUSUS
PERAN SYNERGIST
PENGGERAK PEMBANTU –
PENETRAL
YAITU OTOT YANG MEMAINKAN
PERAN KEDUA DALAM
KESETIMBANGAN
LEVER DAN MESIN
SEDERHANATUAS (LEVERAGE)
SEBUAH PALANG KAKU YANG BERPUTAR SEKITAR TITIK TERTENTU SEBAGAI SUMBU (A = AXIS), DENGAN KEKUATAN (F = FORCE) UNTUK MENGGERAKKANNYA, DAN TAHANAN (R = RESISTANCE) UNTUK DITANGGULANGINYA.
KELAS-KELAS DARI TUAS ADA 3 MACAM (KELAS)
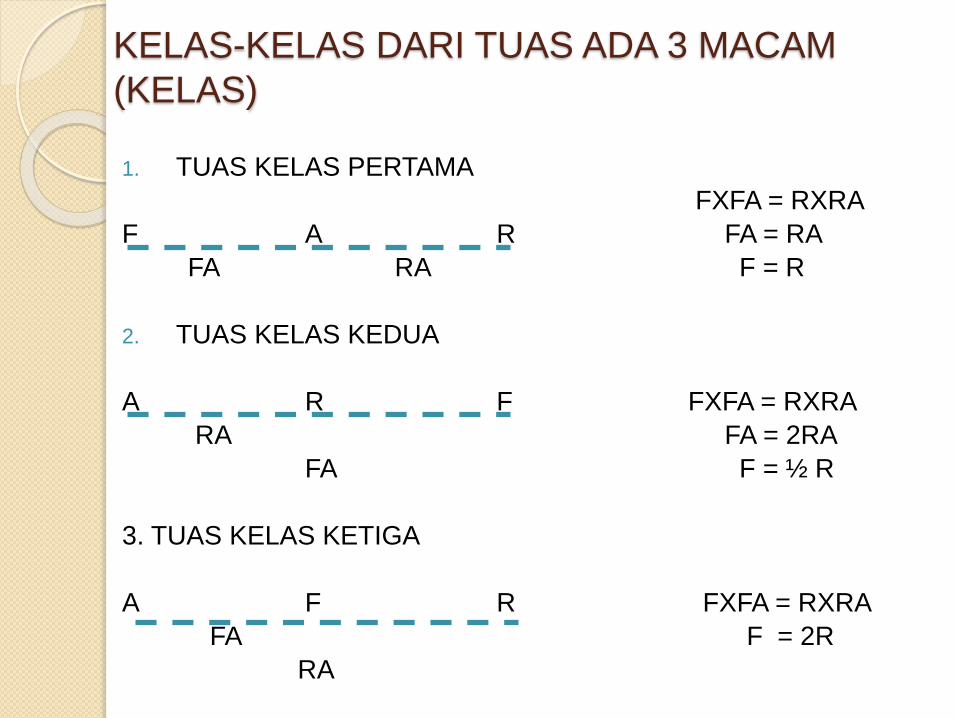
KELAS-KELAS DARI TUAS ADA 3 MACAM
(KELAS)
1. TUAS KELAS PERTAMA
FXFA = RXRA
F A R FA = RA
FA RA F = R
2. TUAS KELAS KEDUA
A R F FXFA = RXRA
RA FA = 2RA
FA F = ½ R
3. TUAS KELAS KETIGA
A F R FXFA = RXRA
FA F = 2R
RA
PROYEKSI
KEKUATAN YANG MEMPENGARUHI PENERBANGAN
1. KEKUATAN MENDORONG
2. KEKUATAN GRAVITASI
3. TAHANAN UDARA
Add. 1. KEKUATAN MENDORONG
MENGHASILKAN PENGARUH TERTENTU BERGANTUNG PADA TITIKNYA DAN ARAH PENERAPANNYA
PROYEKSI
JIKA LANGSUNG MELALUI TITIK
BERAT MAKA AKAN MENGHASILKAN
GERAK LINIER
JIKA KEKUATAN DIBAWAH TITIK
BERAT MAKA AKAN SPIN KE
BELAKANG
JIKA KEKUATAN DI ATAS TITIK BERAT
MAKA AKAN SPIN KE DEPAN
JIKA KEKUATAN DI KIRI TITIK BERAT
MAKA AKAN SPIN KE ARAH JARUM
JAM
PROYEKSI
Add. 2. KEKUATAN GRAVITASIGRAVITASI AKAN MENYEBABKAN OBYEK MENURUN. DISEBABKAN OLEH:> BERAT (MASSA)> BANYAKNYA KEKUATAN DORONGAN> PENGARUH TAHANAN UDARA
Add. 3. PENGARUH TAHANAN UDARA> DAERAH PERMUKAAN STREAMLINE> KEPADATAN (PENGARUH MOMENTUM)
GERAK
DASAR UNTUK UNJUK KERJA OLAH RAGA
DIDUKUNG KEKUATAN (KONTRAKSI OTOT DAN GAYA TARIK BUMI)
GERAK ROTASI DAN GERAK TRANSLASI
GERAK ROTASI = PERPUTARAN OBJEK SEKITAR SUMBU
GERAK TRANSLASI = GERAK MELALUI SUATU JARAK DARI SATU TITIK KE TITIK LAINNYA
GERAK
OBJEK BERGERAK PADA GARIS
LURUS
MANUSIA BERGERAK LINIER
(DITARIK, DIDORONG)
MANUSIA BERGERAK LINIER
KARENA GERAK ROTASI
BERGERAK LINIER TERJADI
KARENA PERPUTARAN TANGAN
(TANGAN DALAM ANGGAR)
GERAK
KECEPATAN DAN MOMENTUM
KECEPATAN, KECEPATAN RATA-RATA,
KECEPATAN MAKSIMUM, KECEPATAN
AKHIR.
PERCEPATAN, PERLAMBATAN
MASSA OBJEK YANG DIGABUNG
DENGAN KECEPATANNYA DIKATAKAN
BAHWA OBJEK DIKATAKAN
MEMPUNYAI MOMENTUM.
GERAK
HUKUM-HUKUM DASARHUKUM NEWTON (1642-1727)
1. HUKUM LEMBAM, TUBUH YANGDIAM CENDERUNG TETAP DIAM,TUBUH YANG BERGERAKCENDERUNG MENE RUSKANGERAK DENGAN KECEPATAN YANGTETAP KE ARAH YANG SAMAKECUALI ADA PERLAKUAN OLEHKEKU ATAN DARI LUAR. TAHANANUNTUK MENGUBAH GERAKDINAMAKAN KELEMBAMAN(INERTIA)
GERAKHUKUM-HUKUM DASAR
2. HUKUM PERCEPATAN, KECEPATANTUBUH BERUBAH BILA DILAKUKANKEKUATAN TAMBAHAN.DEMIKIAN JUGA BILA DIGUNAKANBERLAWANAN DENGAN GERAK OBJEK(MENGHENTIKAN ATAU MEMBALIKKANARAH).
3. HUKUM KEKUATAN BALASAN, HASILKEKUATAN YANG PERTAMA AKANMENCIPTAKAN KEKUATAN LAINNYAYANG BERLAWANAN ATAU SESUAIDENGAN KEKUATAN YANG PERTAMA(KAYUHAN RENANG)
GERAK
HUKUM-HUKUM DASAR
MENGGABUNGKAN GERAK
TRANSLATORY DAN ROTARI
CONTOH-CONTOH :
- LEMPAR CAKRAM DAN LONTAR
MARTIL
- LOMPAT JAUH DAN LOMPAT TINGGI
- MEMUKUL BOLA SOFT BALL
- PENARI / SENAM LANTAI
GERAKHUKUM-HUKUM DASAR
KONTINUITAS GERAK
DUA ATAU LEBIH GERAK YANGBERURUTAN MENYOKONGGERAKAN YANG SAMA, DENGANTIDAK ADA ISTIRAHAT.
CONTOH : PELONPAT TINGGI GALAH,GERAKAN KIP, ROLL, TOLAKPELURU, DLL.