i. bab i pendahuluan -...
TRANSCRIPT

1
I. BAB I
PENDAHULUAN
I.1 Latar Belakang
Seiring dengan perkembangan teknologi, penggunaan action camera untuk
pengumpulan data geospasial menjadi sesuatu yang penting dan menjadi populer.
Berbagai jenis action camera seperti GoPro Hero 3, Xiaomi Yi, dan HD 4000 telah
beredar dipasaran dengan harga yang terjangkau. Pada dasarnya action camera yang
merupakan kamera digital dengan karakteristik ringan, berdimensi kecil, tahan air, dan
field of view (FOV) yang lebar dikembangkan untuk kegiatan olahraga maupun
fotografi dasar laut. Berdasarkan karakteristiknya, penggunaan action camera mulai
meluas untuk kegiatan pengumpulan data menggunakan Unmanned Aerial Vehicle
(UAV), mobile mapping system, maupun kegiatan fotogrametri lainnya (Teo, 2015).
Gambar I.1 Action camera Xiaomi Yi (Xiao Yi, 2015).
Secara umum, action camera memudahkan pengguna untuk melakukan
pengambilan data geospasial. Data geospasial yang dimaksud dapat berupa data model
tiga dimensi. Penggunaan action camera dalam pengambilan data ini memiliki
kelebihan yaitu bersifat fleksibel dan membutuhkan biaya minimal (Cruz dkk, 2015).
Penggunaan action camera dalam pengambilan data dapat dilakukan dengan metode
fotogrametri jarak dekat. Metode ini memungkinkan pengguna untuk mengambil data
dalam rentang jarak kurang dari 300 meter (Wolf dkk, 2014).
2
Tiap-tiap action camera memiliki perbedaan dari segi spesifikasi seperti sensor
kamera dan fokus kamera. Lensa yang digunakan berbentuk wide lens sehingga tingkat
dstorsi yang dihasilkan jauh lebih besar (Balleti dkk, 2014). Hal tersebut
mengakibatkan hasil perekaman suatu objek berbeda signifikan dibandingkan dengan
bentuk aslinya. Untuk itu perlu dilakukan koreksi distorsi pada hasil perekaman objek.
Koreksi distorsi dibutuhkan agar didapatkan data foto yang akurat. Untuk
melakukan koreksi distorsi digunakan parameter-parameter geometrik lensa yang
dihasilkan dari proses kalibrasi kamera. Parameter ini digunakan untuk
menghilangkan distorsi dengan harapan hasil pemotretan atau foto akan mengalami
distorsi minimal.
Distorsi yang terjadi pada hasil pemotretan akan berpengaruh terhadap
ketelitian dari hasil pemodelan tiga dimensi. Untuk itu perlu dilakukan evaluasi
ketelitian penggunaan action camera untuk pemodelan tiga dimensi dengan metode
fotogrametri jarak dekat.
I.2 Identifikasi Masalah
Action camera dengan lensa kamera wide angle akan memberikan hasil
pemotretan dengan tingkat distorsi yang tinggi. Distorsi tersebut merupakan faktor
yang mempengaruhi tingkat ketelitian dari model tiga dimensi. Dengan demikian perlu
dilakukan proses kalibrasi kamera untuk mendapatkan kondisi kamera yang ideal yaitu
memiliki distorsi minimal. Di sisi lain action camera memiliki kelebihan bersifat
fleksibel. Permasalahan yang diangkat pada penelitian ini adalah belum diketahuinya
tingkat ketelitian action camera untuk pemodelan tiga dimensi menggunakan metode
fotogrametri jarak dekat.
I.3 Pertanyaan Penelitian
Pertanyaan penelitian yang muncul dari identifikasi masalah dalam penelitian ini
adalah sebagai berikut:
1. Apakah kalibrasi kamera pada action camera dapat meningkatkan ketelitian
model tiga dimensi secara signifikan?
2. Sampai sejauh mana kemampuan penggunaan action camera untuk pemodelan
tiga dimensi dapat dilakukan?

3
3. Apakah hasil pemodelan tiga dimensi menggunakan action camera dapat
menggantikan hasil pemodelan menggunakan kamera DSLR?
I.4 Cakupan Penelitian
Penelitian ini dilakukan untuk mendapatkan data foto yang akan digunakan
sebagai bahan pembuatan model tiga dimensi. Pengambilan data dilakukan pada tahun
2016. Model tiga dimensi dihasilkan dari perekaman objek dilapangan. Objek
penenlitian adalah Candi Gebang.
Data utama penelitian adalah foto objek yang diperoleh dari ekstraksi video.
Data foto kemudian digunakan sebagai data pembuatan model tiga dimensi. Untuk
mendapatkan jawaban dari pertanyaan penelitian serta menghasilkan penelitian yang
fokus maka diperlukan batasan batasan dalam penelitian. Batasan-batasan pada
penelitian ini yaitu:
1. Objek penelitian adalah sisi selatan dan sisi timur Candi Gebang.
2. Pengambilan data menggunakan dua jenis kamera yaitu action camera
(Xiaomi Yi) dan kamera DSLR (Canon 600D). Data awal yang diperoleh
adalah data dalam format video.
3. Data koordinat target di lapangan diambil menggunakan total station
reflectorless untuk uji ketelitian kedua buah kamera dengan menggunakan
sistem koordinat UTM.
I.5 Tujuan Penelitian
Tujuan dari penelitian ini adalah melakukan evaluasi ketelitian penggunaan
action camera untuk pemodelan tiga dimensi menggunakan metode fotogrametri jarak
dekat. Evaluasi dilakukan dengan melihat tingkat ketelitian model tiga dimensi yang
dihasilkan sebelum dan sesudah proses kalibrasi action camera dan dibandingkan
dengan model tiga dimensi dari kamera DSLR.
I.6 Manfaat Penelitian
Penggunaan action camera untuk pemodelan tiga dimensi diharapkan
memberikan sebuah terobosan baru di dunia fotogrametri jarak dekat. Hasil evaluasi
ini diharapkan menjadi pertimbangan bagi instansi-instansi terkait maupun individu

4
dalam melakukan pengambilan data dan informasi geospasial secara mudah,fleksibel,
dan efisien.
I.7 Tinjauan Pustaka
Penelitian ini dilakukan dengan melakukan pengambilan data fotogrametri
untuk pemodelan tiga dimensi menggunakan action camera. Metode yang diterapkan
dalam pengambilan data di lapangan adalah metode fotogrametri jarak dekat dengan
objek berupa bangunan. Ketelitian hasil pemodelan tersebut diharapkan meningkat
setelah dilakukan kalibrasi dan memiliki ketelitian yang tidak berbeda signifikan
dengan kamera DSLR. Penelitian yang telah dilakukan sebelumnya antara lain
mengevaluasi ketelitian action camera terhadap hasil survei terestris dan pengujian
terhadap berbagai macam proses kalibrasi kamera.
Balleti dkk (2014) melakukan penelitian terkait dengan berbagai macam proses
kalibrasi terhadap action camera menggunakan beberapa perangkat lunak untuk
keperluan fotogrametri. Hasil penelitian ini menyebutkan bahwa kalibrasi kamera
dapat mengurangi distorsi yang terjadi dan meningkatkan ketelitian hasil pemodelan.
Cruz dkk (2015) melakukan penelitian yang bertujuan mengembangkan sistem
fotogrametri untuk pemodelan tiga dimensi agar hasil pemodelan menggunakan action
camera (GoPro) memiliki ketelitian yang hampir setara dengan data model tiga
dimensi menggunakan survei terestris. Konsep utama yang digunakan adalah konsep
sterioskop dengan memanfaatkan dua eksposur yang simultan untuk memproses data
dari dua kamera yang menangkap gambar secara bersamaan.
Aristia (2014) melakukan penelitian tentang pembuatan model tiga dimensi
kawasan cagar budaya menggunakan teknik fotogrametri jarak dekat yaitu dari data
foto terestris dan foto udara kawasan Candi Sambisari. Hasil dari penelitian ini adalah
data foto terestris dan data foto udara dapat digunakan untuk pemodelan tiga dimensi
dan digabungkan menjadi satu model.
Janitra (2014) melakukan penelitian terkait dengan pembuatan model tiga
dimensi Candi Gebang menggunakan metode fotogrametri jarak dekat. Hasil dari
penelitian ini adalah akuisisi data tiga dimensi untuk objek berukuran kecil efektif
dilakukan dengan metode fotogrametri jarak dekat.
5
Teo (2015) melakukan penelitian yang bertujuan membandingkan gambar dan
video yang dihasilkan oleh beberapa action camera untuk pembentukan point cloud
tiga dimensi. Penelitian ini menggunakan beberapa algoritma seperti algoritma
structure from motion (SfM) dan semi-global matching (SGM).
Perbedaan penelitian yang penulis lakukan adalah dari segi objek, peralatan,
maupun perangkat lunak yang digunakan dalam pengolahan data. Penulis melakukan
penelitian terkait dengan tingkat ketelitian penggunaan action camera untuk
pemodelan tiga dimensi dengan metode fotogrametri jarak dekat. Ketelitan tersebut
dapat dievaluasi berdasarkan kenampaan objek di lapangan maupun berdasarlan
geometri objek dengan melakukan uji statistik.
I.8 Landasan Teori
I.8.1 Fotogrametri Jarak Dekat
Fotogrametri seperti didefinisikan oleh American Society of Photogrammetry
merupakan seni, ilmu, dan teknologi untuk memperoleh informasi yang handal
mengenai objek fisik dan lingkungan melalui proses perekaman, pengukuran, dan
intepretasi foto maupun pola yang terekam oleh pancaran energi elektromagnetik.
Istilah fotogrametri jarak dekat pada umumya digunakan untuk foto terestrial yang
mempunyai jarak objek sampai dengan 300 meter (Wolf dkk, 2014). Fotogrametri
jarak dekat dilakukan dengan pengukuran lapangan dalam waktu singkat tanpa ada
kontak langsung dengan objek. Metode ini lebih akurat, cepat, ekonomis dan handal
dibandingkan metode lain. (Yilmaz dkk, 2008). Foto terestris dibuat dengan kamera di
permukaan bumi yang pada umumnya diketahui posisi dan orientasiya. Foto terestris
dapat dilakukan terhadap objek yang bersifat tetap (statis) atau objek yang bergerak
(dinamis). Untuk memperoleh data foto terestris objek yang bersifat tetap maupun
bergerak dapat menggunakan data dalam format video.
6
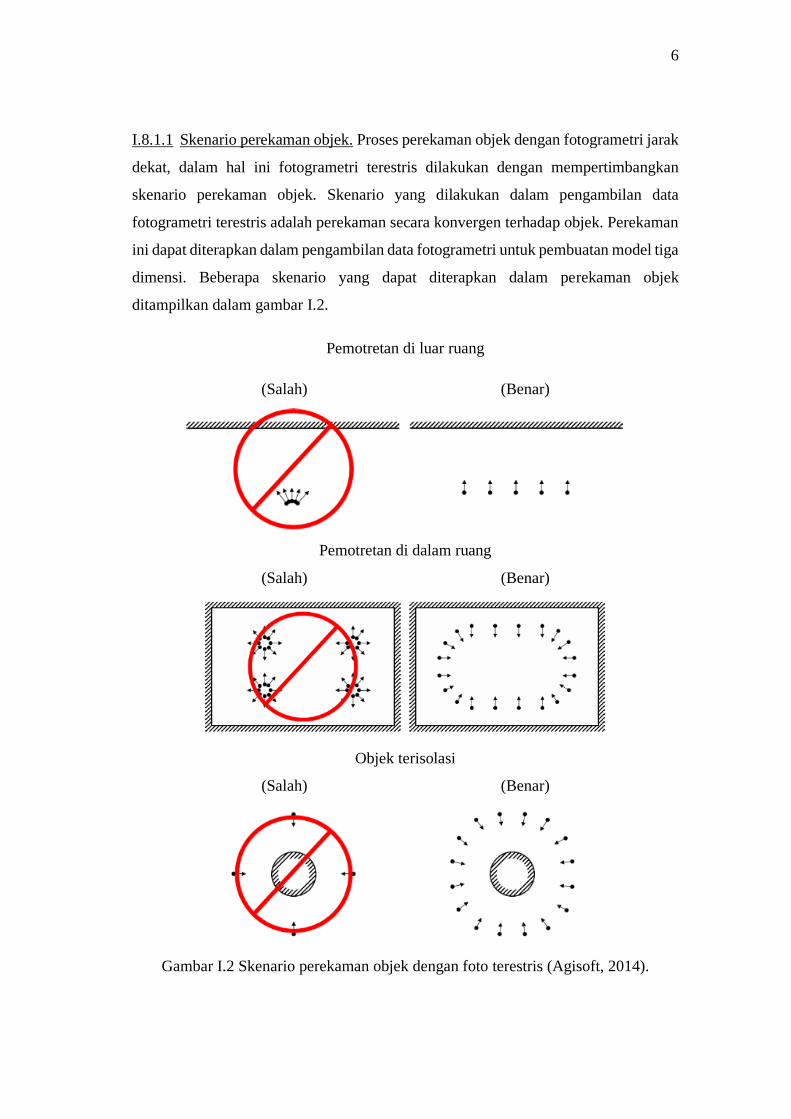
I.8.1.1 Skenario perekaman objek. Proses perekaman objek dengan fotogrametri jarak
dekat, dalam hal ini fotogrametri terestris dilakukan dengan mempertimbangkan
skenario perekaman objek. Skenario yang dilakukan dalam pengambilan data
fotogrametri terestris adalah perekaman secara konvergen terhadap objek. Perekaman
ini dapat diterapkan dalam pengambilan data fotogrametri untuk pembuatan model tiga
dimensi. Beberapa skenario yang dapat diterapkan dalam perekaman objek
ditampilkan dalam gambar I.2.
Pemotretan di luar ruang
(Salah) (Benar)
Pemotretan di dalam ruang
(Salah) (Benar)
Objek terisolasi
(Salah) (Benar)
Gambar I.2 Skenario perekaman objek dengan foto terestris (Agisoft, 2014).
7
Skenario perekaman pertama dilakukan pada objek diluar ruang seperti
pemotretan gedung atau objek lainnya. Posisi kamera yang benar saat perekaman
adalah posisi planar. Posisi ini akan menghasilkan foto dengan kemiripan orientasi
antar foto. Skenario perekaman kedua dilakukan pada objek di dalam ruang. Posisi
kamera yang benar adalah posisi yang mampu mencakup keseluruhan ruang. Skenario
perekaman ketiga dilakukan pada objek terisolasi. Posisi kamera yang digunakan
dikenal dengan sebutan posisi konvergen. Posisi ini mampu menghasilkan konfigurasi
perbandingan base/height ratio yang baik (Maharani, 2015). Pada beberapa kasus,
penggunaan model stereo dari dua buah foto tidak dapat merekonstruksi objek yang
kompleks, sehingga dibutuhkan jumlah foto yang banyak untuk merekonstruksi
keseluruhan objek.
I.8.2 Kamera
Kamera yang digunakan dalam fotogrametri secara umum dibagi menjadi dua,
yaitu kamera metrik dan kamera non metrik. Kamera metrik merupakan kamera yang
memiliki ketelitian tinggi dan biasa digunakan untuk kebutuhan pemetaan dan
memiliki resolusi spasial yang baik. Sedangkan kamera non metrik adalah kamera
yang mengedepankan kualitas gambar yang dihasilkan. Kamera non metrik dapat
dikalibrasi untuk menghilangkan kesalahan sistematik dan mendapatkan hasil yang
baik berbagai terapan fotogrametri terrestrial (Wolf dkk, 2014).
Kamera non metrik yang banyak digunakan adalah jenis kamera non metrik
yang menggunakan sistem digital atau dikenal dengan sebutan kamera digital. Kamera
digital memiliki komponen utama yang terdiri atas lensa, sensor, dan media
penyimpanan. Kamera digital menggunakan sensor optik elektrik berupa Charge-
Couple Device (CCD) atau Complementary Metal Oxide Semiconductor (CMOS)
(Maharani, 2015). Kamera digital dengan sensor berupa CCD mampu menghasilkan
gambar dengan kualitas yang baik dibandingkan dengan sensor CMOS. Sensor CCD
seringkali digunakan dalam teknologi untuk menghasilkan gambar yang baik seperti
fotografi, perfilman, industri pengadaan citra, ilmu pengetahuan, dan kesehatan
(Litwiller, 2001).
Jenis kamera yang termasuk dalam kamera digital adalah kamera Digital Single
Lens Reflex (DSLR) dan action camera. Kamera DSLR atau kamera digital lensa
8
tunggal dengan refleks memiliki desain yang berbeda dari segi perjalanan cahaya
menuju lensa. Cahaya yang bergerak dari satu lensa dilewatkan menuju dua tempat,
yaitu bidang fokus dan viewfinder (layar yang menampilkan gambar). Kamera DSLR
memiliki lensa standar atau disebut sebagai lensa normal. Selain kamera DSLR,
terdapat kamera yang disebut sebagai action camera. Seiring perkembangan teknologi
kamera, action camera mulai digunakan dalam dunia fotogrametri. Menurut Teo
(2015), action camera adalah kamera yang memiliki karakteristik ringan, berdimensi
kecil, tahan air, dan field of view (FOV) yang lebar. Kamera ini pada awalnya
digunakan dalam kegiatan olahraga maupun fotografi dasar laut.
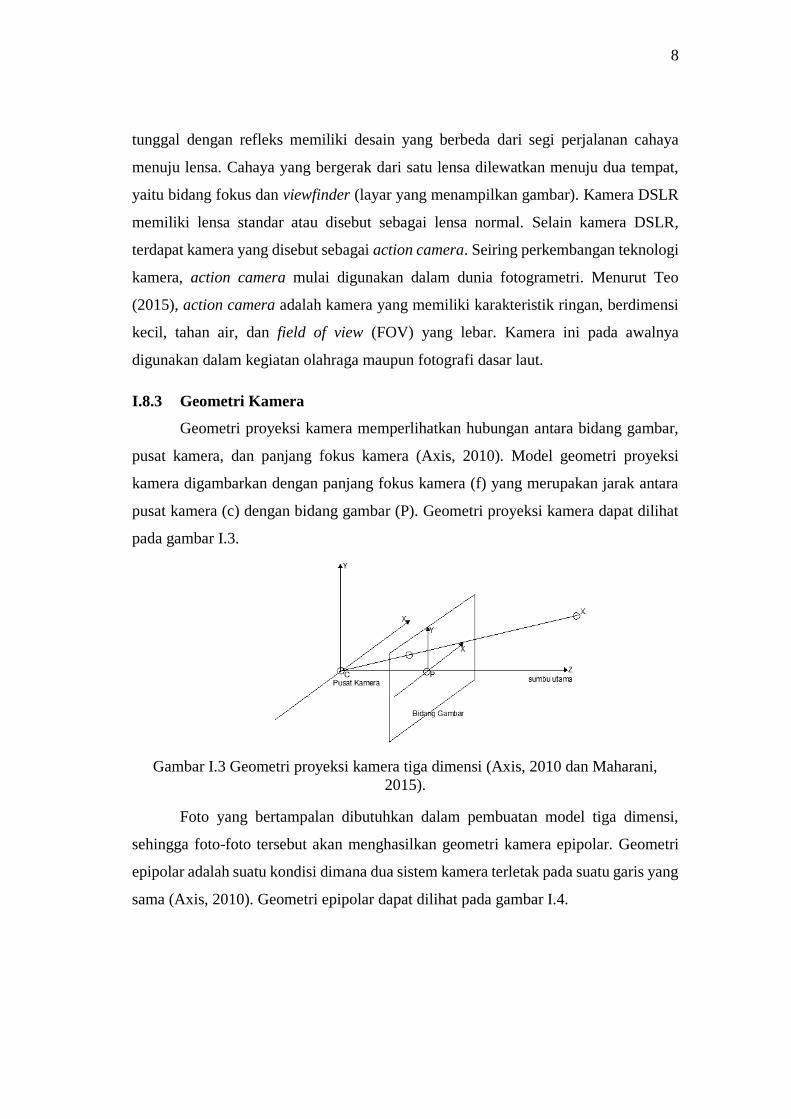
I.8.3 Geometri Kamera
Geometri proyeksi kamera memperlihatkan hubungan antara bidang gambar,
pusat kamera, dan panjang fokus kamera (Axis, 2010). Model geometri proyeksi
kamera digambarkan dengan panjang fokus kamera (f) yang merupakan jarak antara
pusat kamera (c) dengan bidang gambar (P). Geometri proyeksi kamera dapat dilihat
pada gambar I.3.
Gambar I.3 Geometri proyeksi kamera tiga dimensi (Axis, 2010 dan Maharani,
2015).
Foto yang bertampalan dibutuhkan dalam pembuatan model tiga dimensi,
sehingga foto-foto tersebut akan menghasilkan geometri kamera epipolar. Geometri
epipolar adalah suatu kondisi dimana dua sistem kamera terletak pada suatu garis yang
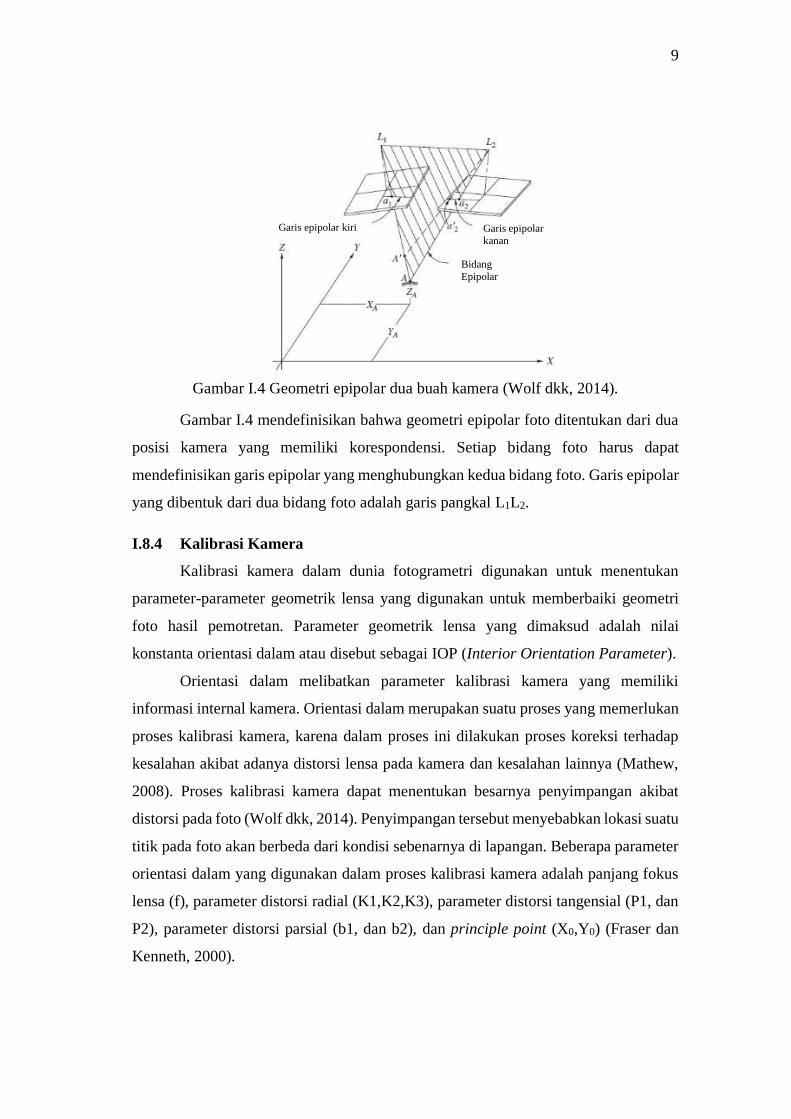
sama (Axis, 2010). Geometri epipolar dapat dilihat pada gambar I.4.
9
Gambar I.4 Geometri epipolar dua buah kamera (Wolf dkk, 2014).
Gambar I.4 mendefinisikan bahwa geometri epipolar foto ditentukan dari dua
posisi kamera yang memiliki korespondensi. Setiap bidang foto harus dapat
mendefinisikan garis epipolar yang menghubungkan kedua bidang foto. Garis epipolar
yang dibentuk dari dua bidang foto adalah garis pangkal L1L2.
I.8.4 Kalibrasi Kamera
Kalibrasi kamera dalam dunia fotogrametri digunakan untuk menentukan
parameter-parameter geometrik lensa yang digunakan untuk memberbaiki geometri
foto hasil pemotretan. Parameter geometrik lensa yang dimaksud adalah nilai
konstanta orientasi dalam atau disebut sebagai IOP (Interior Orientation Parameter).
Orientasi dalam melibatkan parameter kalibrasi kamera yang memiliki
informasi internal kamera. Orientasi dalam merupakan suatu proses yang memerlukan
proses kalibrasi kamera, karena dalam proses ini dilakukan proses koreksi terhadap
kesalahan akibat adanya distorsi lensa pada kamera dan kesalahan lainnya (Mathew,
2008). Proses kalibrasi kamera dapat menentukan besarnya penyimpangan akibat
distorsi pada foto (Wolf dkk, 2014). Penyimpangan tersebut menyebabkan lokasi suatu
titik pada foto akan berbeda dari kondisi sebenarnya di lapangan. Beberapa parameter
orientasi dalam yang digunakan dalam proses kalibrasi kamera adalah panjang fokus
lensa (f), parameter distorsi radial (K1,K2,K3), parameter distorsi tangensial (P1, dan
P2), parameter distorsi parsial (b1, dan b2), dan principle point (X0,Y0) (Fraser dan
Kenneth, 2000).
Garis epipolar
kanan
Bidang
Epipolar
Garis epipolar kiri

10
I.8.5 Distorsi Lensa
Penggunaan kamera untuk melakukan pengambilan data fotogrametri tidak
terlepas dari adanya distorsi lensa. Distorsi lensa terjadi jika cahaya berubah arah
setelah melalui lensa sehingga tidak sejajar dengan arah masuk cahaya. Distorsi lensa
dapat menyebabkan adanya kesalahan informasi yang diperoleh dari hasil pemotretan
seperti perbedaan dimensi suatu lokasi maupun geometri objek yang terbentuk.
Distorsi lensa mengakibatkan posisi gambar berubah dari posisi idealnya. Persamaan
matematis yang digunakan dalam model distorsi lensa terdiri atas dua komponen, yaitu
distorsi radial dan distorsi tangensial. Distorsi radial terjadi sepanjang garis radial dari
titik utama. Sedangkan distorsi tangensial terjadi akibat ketidaksempurnaan dalam
pembuatan dan penyelarasan sistem lensa (Wolf dkk, 2014). Distorsi radial dan
distorsi tangensial pada lensa ditunjukkan pada Gambar I.5.
(a) (b)
Gambar I.5 Distorsi radial (a) dan distorsi tangensial (b) (Wolf dkk, 2014).
Brown’s Camera Distortion Model merupakan model matematik yang
digunakan untuk menentukan parameter deformasi lensa yang muncul pada foto.
Model tersebut menggambarkan distorsi radial dan distorsi tangensial dari lensa.
Persamaan distorsi yang digunakan dijelaskan dalam persamaan I.1 dan I.2 (Agisoft,
2014).
𝑥𝐴 = 𝑥(1 + 𝐾1𝑟2 + 𝐾2𝑟4 + 𝐾3𝑟6 + 𝐾4𝑟8) + 𝑃2(𝑟2 + 2𝑥2) + 2𝑃1𝑥𝑦 ...... (I.1)
𝑦𝐴 = 𝑦(1 + 𝐾1𝑟2 + 𝐾2𝑟4 + 𝐾3𝑟6 + 𝐾4𝑟8) + 𝑃1(𝑟2 + 2𝑦2) + 2𝑃2𝑥𝑦 ...... (I.2)
Dalam hal ini,
𝑥𝐴 , 𝑦𝐴 : koordinat titik A pada foto

11
𝑥 , 𝑦 : koordinat foto relatif terhadap koordinat principle point
f : panjang fokus kamera
𝐾1,𝐾2, 𝐾3, 𝐾4 : koefisien distorsi radial lensa
𝑃1, 𝑃2 : koefisien distorsi tangensial lensa
r : jarak penyimpangan dari titik A ke principle point
I.8.6 Geometri Video
Video merupakan rangkaian dari banyak frame yang merekam setiap gerakan
pada objek. Pengumpulan data fotogrametri jarak dekat dengan perekaman video
memiliki banyak kelebihan antara lain mampu merekam objek secara kontinyu dan
efisien. Video merupakan rangkaian dari banyak frame gambar yang diputar dengan
cepat sehingga terlihat menjadi satu kesatuan. Pergerakan antar frame yang terjadi
sangat halus sehingga adanya jeda antar frame tidak dapat terlihat. Pergerakan video
menjadi salah satu faktor yang berpengaruh pada video yang dihasilkan dari proses
perekaman. Pergerakan yang umum terjadi pada kamera adalah pergeseran sepanjang
sumbu horizontal dan vertikal yang disebut sebagai track dan boom. Pergeseran yang
searah dengan sumbu optis kamera disebut dolly. Sedangkan perputaran pada bidang
vertikal disebut pan dan perputaran pada bidang horizontal disebut tilt. Pergerakan lain
yang terjadi adalah rotasi kamera yang dikenal dengan sebutan roll, dan pergerakan
ketika kamera mengalami perubahan panjang fokus disebut zoom (Wang, 2002).
Objek yang direkam dalam format video akan menghasilkan lebih banyak
frame. Frame yang dihasilkan dapat mencapai 25 frame per detik. Banyaknya frame
mampu mengurangi kemungkinan adanya data yang hilang. Prosentase pertampalan
yang digunakan pada blok udara sebesar 60 % untuk tampalan ke depan dan 20% untuk
tampalan ke samping dapat digunakan di blok terestrial (Matthews, 2008).
Sistem perekaman video pada kamera menggunakan sistem yang sama seperti
sistem perekaman dalam fotografi, yaitu dilakukan oleh sensor kamera CCD/CMOS.
Sensor melakukan proses penyiaman terhadap objek hingga membentuk frame video
dan hasilnya disimpan dalam CCD/CMOS.
Pembentukan gambar atau foto dari objek yang bergerak atau dari kamera yang
bergerak mempertimbangkan ukuran objek dan kecepatan dari kamera untuk
menghindari adanya motion blur. Adanya motion blur tidak dipengaruhi oleh jenis

12
CCD/CMOS yang ada pada kamera. Jika sebuah objek atau kamera bergerak
sepanjang jarak tertentu maka akan muncul nilai exposure dan menghasilkan motion
blur. Gambar atau foto yang dihasilkan dengan tingkat exposure kurang dari 10%
dianggap masih layak untuk digunakan (Anonim, 2014).
I.8.7 Persamaan Kolinearitas
Penyelesaian umum untuk setiap masalah dalam fotogrametri jarak dekat atau
fotogrametri terestris dapat diperoleh dengan menerapkan persamaan kolinearitas.
Persamaan kolinearitas yang digunakan dijelaskan pada persamaan I.3 dan I.4 (Wolf
dkk, 2014).
𝑥𝐴 = 𝑥0 − 𝑓 [𝑚11 (𝑋𝐴−𝑋𝐿) + 𝑚12 (𝑌𝐴−𝑌𝐿) + 𝑚13 (𝑍𝐴−𝑍𝐿)
𝑚31 (𝑋𝐴−𝑋𝐿) + 𝑚32 (𝑌𝐴−𝑌𝐿) + 𝑚33 (𝑍𝐴−𝑍𝐿)] ............................ (I.3)
𝑦𝐴 = 𝑦0 − 𝑓 [𝑚21 (𝑋𝐴−𝑋𝐿) + 𝑚22 (𝑌𝐴−𝑌𝐿) + 𝑚23 (𝑍𝐴−𝑍𝐿)
𝑚31 (𝑋𝐴−𝑋𝐿) + 𝑚32 (𝑌𝐴−𝑌𝐿) + 𝑚33 (𝑍𝐴−𝑍𝐿)] ............................ (I.4)
Dalam hal ini,
𝑥𝐴 , 𝑦𝐴 : koordinat titik A pada foto
𝑥0 , 𝑥0 : koordinat principle point
m11……..mnn : matrik rotasi
f : panjang fokus kamera
XL, YL, ZL : koordinat posisi kamera
XA, YA, ZA : koordinat titik A pada tanah
Persamaan kolinearitas terestris mengandung enam elemen orientasi luar
(EOP) yaitu omega, phi kappa, XL, YL, ZL. Persamaan ini dapat digunakan untuk
menentukan posisi dan orientasi dari foto dan untuk menentukan koordinat titik yang
tampak pada foto yang bertampalan. Geometri hubungan antara sistem koordinat foto
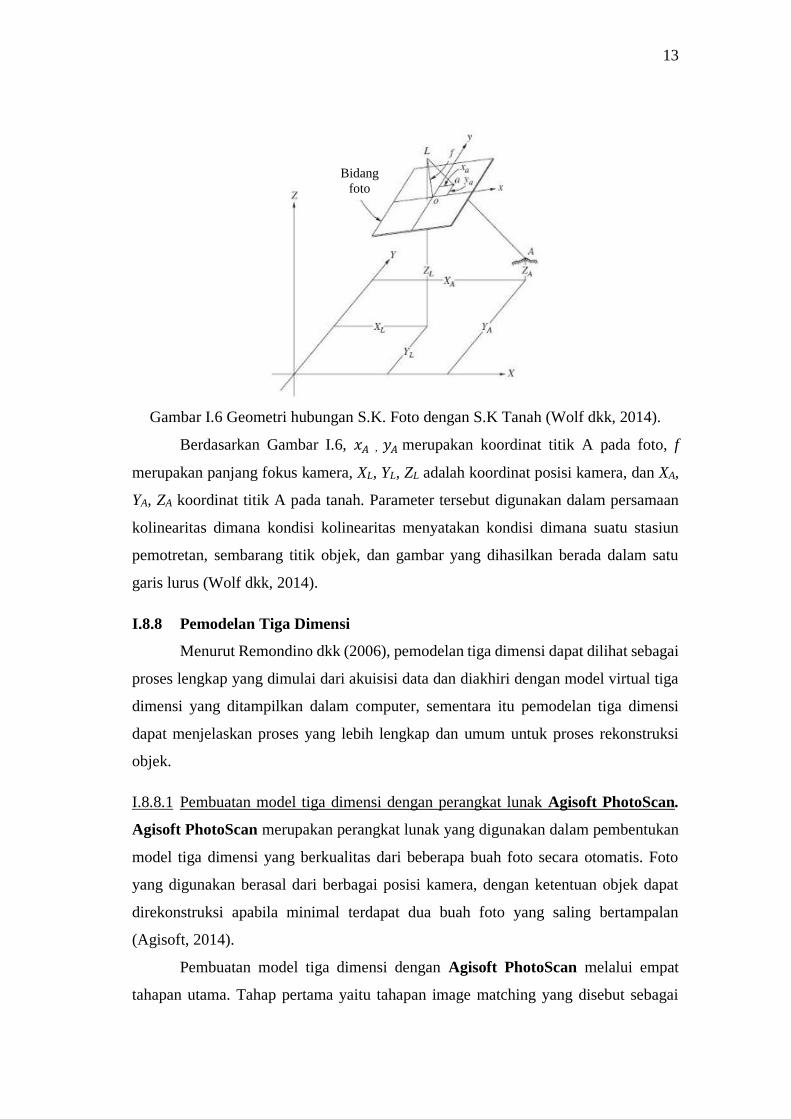
dengan sistem koordinat tanah ditampilkan dalam Gambar I.6.
13
Gambar I.6 Geometri hubungan S.K. Foto dengan S.K Tanah (Wolf dkk, 2014).
Berdasarkan Gambar I.6, 𝑥𝐴 , 𝑦𝐴 merupakan koordinat titik A pada foto, f
merupakan panjang fokus kamera, XL, YL, ZL adalah koordinat posisi kamera, dan XA,
YA, ZA koordinat titik A pada tanah. Parameter tersebut digunakan dalam persamaan
kolinearitas dimana kondisi kolinearitas menyatakan kondisi dimana suatu stasiun
pemotretan, sembarang titik objek, dan gambar yang dihasilkan berada dalam satu
garis lurus (Wolf dkk, 2014).
I.8.8 Pemodelan Tiga Dimensi
Menurut Remondino dkk (2006), pemodelan tiga dimensi dapat dilihat sebagai
proses lengkap yang dimulai dari akuisisi data dan diakhiri dengan model virtual tiga
dimensi yang ditampilkan dalam computer, sementara itu pemodelan tiga dimensi
dapat menjelaskan proses yang lebih lengkap dan umum untuk proses rekonstruksi
objek.
I.8.8.1 Pembuatan model tiga dimensi dengan perangkat lunak Agisoft PhotoScan.
Agisoft PhotoScan merupakan perangkat lunak yang digunakan dalam pembentukan
model tiga dimensi yang berkualitas dari beberapa buah foto secara otomatis. Foto
yang digunakan berasal dari berbagai posisi kamera, dengan ketentuan objek dapat
direkonstruksi apabila minimal terdapat dua buah foto yang saling bertampalan
(Agisoft, 2014).
Pembuatan model tiga dimensi dengan Agisoft PhotoScan melalui empat
tahapan utama. Tahap pertama yaitu tahapan image matching yang disebut sebagai
Bidang
foto
14
tahap alignment pada perangkat lunak ini. Tahap image matching merupakan tahapan
yang bertujuan untuk mencari objek yang sama pada setiap foto dan menemukan posisi
kamera untuk setiap foto serta untuk mendapatkan parameter kalibrasi lensa. Hasil dari
tahap ini adalah sparse point cloud dan konfigurasi posisi kamera. Hasil sparse point
cloud digunakan untuk mengestimasi bentuk model tiga dimensi. Tahap kedua adalah
pembentukan dense point cloud berupa titik-titik yang memiliki kerapatan diatas
sparse point cloud. Tahap ketiga adalah pembentukan mesh. Mesh dibentuk dari
penggabungan dari sparse point cloud atau dense point cloud menjadi jaring segitiga.
Tahap keempat adalah pembentukan tekstur dari objek yang dimodelkan. Tekstur
model diperoleh dari foto-foto yang digunakan dalam pemodelan. Foto –foto tersebut
ditampalkan pada objek berdasarkan algoritma yang digunakan dalam Agisoft
PhotoScan. Pada pilihan mapping modes yang digunakan untuk menentukan
bagaimana tekstur objek dikemas dalam atlas tekstur, beberapa algoritma yang
digunakan antara lain generic, adaptive orthophoto, orthophoto, spherical, dan single
photo.
I.8.9 Ground Sample Distance (GSD)
Menurut Harintaka (2012), Ground Sample Distance (GSD) adalah nilai
ukuran terkecil yang mampu terekam dalam satu piksel. Hitungan untuk memperoleh
nilai GSD dapat dilihat pada persamaan I.5 dan I.6.
𝐺𝑆𝐷 = 𝑆𝑃𝑆 𝑥 𝐷
𝑓 ........................................................................................ (I.5)
Keterangan:
SPS = sensor pixel size
D = jarak objek ke kamera
f = panjang fokus yang digunakan dalam pemotretan
Nilai SPS dari masing-masing kamera dapat dihitung secara manual dengan
menggunakan rumus I.12. Perhitungan nilai SPS dilakukan berdasarkan ukuran dari
sensor kamera (PCMOS) yang diperoleh dari spesifikasi kamera dan ukuran dimensi
foto.
𝑆𝑃𝑆 =𝑃𝐶𝑀𝑂𝑆
𝐾 .............................................................................................. (I.6)
Keterangan:
15
𝑃𝐶𝑀𝑂𝑆 : ukuran dimensi sensor kamera dalam mm
k : ukuran dimensi sensor kamera dalam piksel
I.8.10 Root Mean Square Error (RMSE)
Peraturan Kepala Badan Informasi Geospasial (BIG) nomor 15 tahun 2014
mejelaskan secara rinci tentang perhitungan nilai RMSE (Root Mean Square Error).
RMSE merupakan pengujian ketelitian posisi yang mengacu pada perbedaan
komponen koordinat X,Y, dan Z antara titik uji pada gambar atau peta dengan lokasi
sesungguhnya dari titik uji pada permukaan tanah. RMSE dapat digunakan untuk
menggambarkan akurasi meliputi kesalahan random dan sistematik. Pengujian
ketelitian posisi juga dapat dilakukan pada model tiga dimensi. RMSE pada model tiga
dimensi mencakup nilai RMSE pada komponen koordinat horizontal (X,Y) dan
komponen koordinat vertikal (Z). Nilai RMSE dapat dihitung menggunakan
persamaan I.7 dan I.8.
RMSEℎ𝑜𝑟𝑖𝑧𝑜𝑛𝑡𝑎𝑙 = √∑(𝑋1−𝑋2)2+(𝑌1−𝑌2)2
𝑛 ....................................................... (I.7)
RMSE𝑣𝑒𝑟𝑡𝑖𝑘𝑎𝑙 = √∑(𝑍1−𝑍2)2
𝑛 ....................................................................... (I.8)
Dalam hal ini,
𝑋1 : nilai komponen koordinat X target di lapangan
𝑋2 : nilai komponen koordinat X target yang diuji
𝑌1 : nilai komponen koordinat Y target di lapangan
𝑌2 : nilai komponen koordinat Y target yang diuji
𝑍1 : nilai komponen koordinat Z target di lapangan
𝑍2 : nilai komponen koordinat Z target yang diuji
Ketelitian model tiga dimensi juga dapat diuji berdasarkan ukuran dimensi
objek. Dimensi yang dimaksud berupa panjangan dari dua buah titik. Nilai RMSE
untuk ukuran dimensi objek dapat dihitung menggunakan persamaan I.9.
RMSE𝑑𝑖𝑚𝑒𝑛𝑠𝑖 = √Σ(Δ𝑙)2
𝑛 ............................................................................. (I.9)
Dalam hal ini,
Δ𝑙 : Selisih ukuran dimensi objek di lapangan dan model
𝑛 : Jumlah ukuran yang digunakan
16
I.8.11 Uji Signifikansi Beda Dua Parameter
Tingkat signifikansi dari suatu ukuran dapat diketahui dengan melakukan uji
signifikansi terhadap objek penelitian. Dalam penelitian ini, uji signifikansi beda dua
parameter dilakukan untuk mengetahui signifikansi perbedaan koordinat dari dua buah
model. Uji ini dilakukan dengan membandingkan selisih nilai antara masing-masing
koordinat model dengan jumlah sampel kurang dari 30.
Hipotesis awal atau H0 yang digunakan diterima jika selisih antara koordinat
model sama dengan nol, artinya koordinat model pertama tidak berbeda secara
signifikan dengan koordinat model yang lain. Model matematis yang digunakan dalam
uji signifikansi dijelaskan pada persamaan I.10 dan I.11 (Widjajanti, 2010).
𝑡 =| 𝑋1−𝑋2 |
√𝜎𝑋12+ 𝜎𝑥2
2 ................................................................................. (I.10)
Dalam hal ini,
t : harga fungsi normal baku
𝑋1 : nilai koordinat target model 1
𝑋2 : nilai koordinat target model 2
𝜎𝑋1 : simpangan baku koordinat model 1
𝜎𝑋2 : simpangan baku koordinat model 2
Hipotesis nol (H0) diterima jika memenuhi persamaan I.11.
𝑡 < 𝑡𝛼
2,𝑛−1 ........................................................................................ (I.11)
I.9 Hipotesis
Berdasarkan penelitian Balleti dkk (2015), data yang dihasilkan oleh action
camera memiliki tingkat distorsi yang tinggi. Besar distorsi lensa dapat diminimalkan
dengan melakukan proses kalibrasi kamera. Menurut Wolf dkk (2014), kamera non
metrik dapat dikalibrasi untuk mendapatkan hasil yang baik untuk berbagai terapan
fotogrametri terrestrial. Dengan demikian proses kalibrasi kamera dapat meningkatkan
ketelitian penggunaan action camera untuk pemodelan tiga dimensi.