
1111111~11111~~~I~~111~I~fj~III~IIIIII~ *30000002323098*
JUDUL:
Saya:
UNIVERSITI TUN HUSSIEN ONN MALAYSIA
BORANG PENGESAHAN STATUS TESIS·
ANTI-SWING CONTROL STRATEGY FOR AUTOMATIC 3 DOF
CRANE SYSTEM USING FLC
SESI PENGAJIAN: 2008/2009
RUSLINDA BINTI RUSLEE (840702-11-5024) (HURUF BESAR)
mengah.lI membenarkan tesis (P-SM/Smjana/Doktor Falsafah)* ini disimpan di Perpustakaan dengan syarat-syarat kegunaan seperti berikut:
1. Tesis adalah hakmilik Universiti Tun Hussien Onn Malaysia. 2. Perpustakaan dibenarkan membuat salinan untuk tujuan pengajian sahaja. 3. Perpustakaan dibenarkan membuat salinan tesis ini sebagai bahan pertukaran antara
institusi pengajian tinggi. 4. **Sila tandakan(.J)
D D [!]
Alamat Tetap:
SULIT
TERHAD
TIDAK TERHAD
8793 TAMAN SAMUDRA 21300 SEBERANG TAKIR KUALA TERENGGANU TERENGGANU DARUL IMAN
Tarikh: ,:)--0 / II /.l.o-o S' i
(Mengandungi maklumat yang berdmjah keselamatan atau kepentingan Malaysia seperti yang tennaktub di dalam AKT A RAI-ISIA RASMI 1972)
(Mengandungi maklumat TERHAD yang telah ditentukan oleh organisasi/badan di mana penyelidikan dijalankan)
(T ANDATANGAN PENYELIA J)
DR. HJ. JIW A BIN ABDULLAH
EN. JAMALUDIN BIN JALANI
Tarikh: ~r / 1\ !l-oV g
CAT A T AN: * Potong yang tidak berkenaan. ** Jika tesis ini SULIT atau TERHAD, sila lampirkan surat daripada pihak
berJ...lIasa/organisasi berkenaan dengan menyatakan sekali sebab dan tempoh tesis ini perlu dikelaskan sebagai SULIT atau TERHAD.
• Tesis dimaksudkan sebagai tesis bagi Ijazah Doktor Falsafah dan Sarjana secara penyelidikan, atau disertai bagi pengajian secara kerja J...lIrsus dan penyelidikan, atau Laporan Projek Sarjana Muda (PSM).
"We declared that we read this project and in our point of view this project is qualified in
ten11S of scope and quality for purpose of awarding the Master's Degree in Electrical
Engineering" .
Signature
Supervisor I
Date
Signature
Supervisor II
Date
••••••••• ~~.-<' •••••••••••••••••••••••
DR.I 'W-A'.. BIN ABDULLAH
.>1 ! / I /..1-V b g' ............. , ......................... .
'l/~;; .. Cf.~ ........... . JAMALUDIN BIN JALANI
.?J . ./.~~ . .!~?~ ................ .
ANTI-SWING CONTROL STRATEGY FOR AUTOMATIC 3 DOF
CRANE SYSTEM USING FLC
RUSLINDA BINTI RUSLEE
A project report submitted as a partial fulfillment
of the requirement for the award of the
Master's Degree in Electrical Engineering
Faculty of Electrical and Electronics Engineering
Universiti Tun Hussein Onn Malaysia (UTHM)
NOVEMBER, 2008

"I declared that this project is the result of my own work except the ideas and references
which 1 have clarified their sources" .
Signature ..... /.~.~ ..................... . I~~;~~A BINTI RUSLEE Name of Writer
Date .... -?~~.! .1.1 •. (~'.~J:~ ..... ......... .
11

Special dedicated to
Ruslee Md Rijin, Mik Wook Salim
&
My love Asmahadi Md Tahir
iii
ACKNOWLEDGEMENT
Alhamdulillah, all praise to Allah, the Most Beneficent and the Most Merciful,
who have helped me lots during my research.
First of all, I am greatly indebted to Allah SWT on His blessing to make this
project successful.
I am deeply grateful for the help that I received from my supervisor, Dr. Hj.
liwa Bin Abdullah and Mr. .Tamaludin Bin lalani during this development of this
project. Their efforts in helping in the development of the project, trough technical
difficulties and in search for relevant literature are much appreciated. Not forgetting to
express my appreciation to Mr. Loh Wei Hong form i-Math Sdn Bhd for his helping me
especially in software problems.
A special thanks to my dearest parents and my lovely darling for their love,
support and motivation for me to handle this project. To appreciate their immense
contribution, this thesis is lovingly dedicated to them.
Last but no least, I would like to extend my gratitude to all friends, colleagues
and who helped me directly or indirectly for their encouragement and help. Their views
and tips are useful indeed. Unfortunately, it is not possible to list of them in this
limitation space.
iv
ABSTRACT
The 3 Degree-of-Freedom (DOF) crane represents one of the most widely
deployed real-world platforms in the world today. It uses levers and pulleys for
gripping, lifting and moving loads horizontally, as well as lowering and releasing the
gripper to the original position. Hence the system produces swing angle which need to
be controlled so that the payload could be transferred efficiently. The existing 3 DOF
systems used conventional Linear Quadratic Regulator (LQR) controller to control the
position and swing angle. This project report proposed the usage of Fuzzy Logic
Controller (FLC) in place ofLQR controller. FLC has a simpler and practical design
approached. It avoids laborious mathematical formulation and computation thus
reducing operating time. The FLC performance for position control and anti-swing
control are compared with LQR controller using MA TLAB simulation. The simulation
results showed, under laboratory limitation, that FLC performed better compared to the
conventional LQR controller.
v
ABSTRAK
Kren automaik 3DOF merupakan salah satu kren digunakan secara meluas di
dunia terutamanya di platform industri berat yang mana menggunakan pengumpil, tuil
dan takal bagi mencengkam, mengangkut, mengalih serta menggerakkan beban dari
satu tempat ke temp at lain secara mendatar, menurunkan serta melepaskan beban
tersebut dan kembali kepada kedudukan asal sistem. Oleh yang demikian, perpindahan
beban atau muatan ini pastinya akan menghasilkan sedikit sudut ayunan dan sudut
ayunan ini perlu dikawal bagi memastikan kelancaran kerja pemindahan beban secara
cepat, efektif dan selamat. 3DOF kren ini telah mengamplikasikan sistem kawalan
konvensional yang dikenali sebagai sistem kawalan pengatur kuadratik datar bagi
mengatasi masalah tersebut. Satu sistem altematif iaitu sistem logik kabur dicadangkan
untuk mengatasi masalah ayunan ini dimana ianya mempunyai reka bentuk yang lebih
mudah dan praktikal selain dapat mengurangkan penggunaan matematik yang kompleks
bagi menggantikan sistem kawalan yang sedia ada dan ini dapat mengurangkan
penggunaan masa. Kebolehan sistem logik kabur bagi kawalan posisi dan anti ayunan
ini dibandingkan dengan pencapaian sistem kawalan konvensional iaitu sistem kawalan
pengatur kuadratik datar dengan menggunakan peri sian simulasi MA TLAB. Hasil dari
simulasi membuktikan bahawa sistem logik kabur ini juga merupakan satu sistem
kawalan yang mempunyai potensi setanding dengan sistem kawalan yang sedia ada bagi
mengatasi masalah ayunan dalam sistem kren.
vi
INTRODUCTION
The 3 DOF crane represents one of the most widely deployed real-world
platforms in the world today that uses levers and pulleys for gripping, lifting and
moving loads horizontally, as well as lowering and release the gripper back. The task
of the 3 DOF crane is to move the payload from one point to another point. Hence the
system produces swing angle which need to be controlled so that the payload will be
transferred quickly, effectively and safely. The 3 DOF crane is separated into three
subsystems which are payload, jib and tower. To deal with these systems, a lot of
control techniques have been used on the basis of controlling swing angle. Since many
controllers can be used to control the system, therefore the most practical and effective
controller have been investigated to replace and implemented to this 3 DOF crane
system. This project only focuses on controlling jib subsystem. The existing controller
of payload and tower subsystem is still used for the controlling purpose. The
conventional LQR controller is used to control position and swing angle of the 3 DOF
crane. Therefore, the simpler and practical controller approach needs to be applied to
the system known as Fuzzy Logic Controller (FLC). In addition, the FLC is known as a
non-model based controller approach and can fulfill the design method as well as
achieve high performances. The application of Fuzzy Logic Controller in the 3 DOF
crane systems is expected to be better than conventional controllers. The design of
Fuzzy Logic Controller is also minimize the mathematical computation and reducing
time consuming. Hence, FLC is predicted to have simpler design approach and pcrfoml
better results as compared to conventional controllers.
vii
VIII
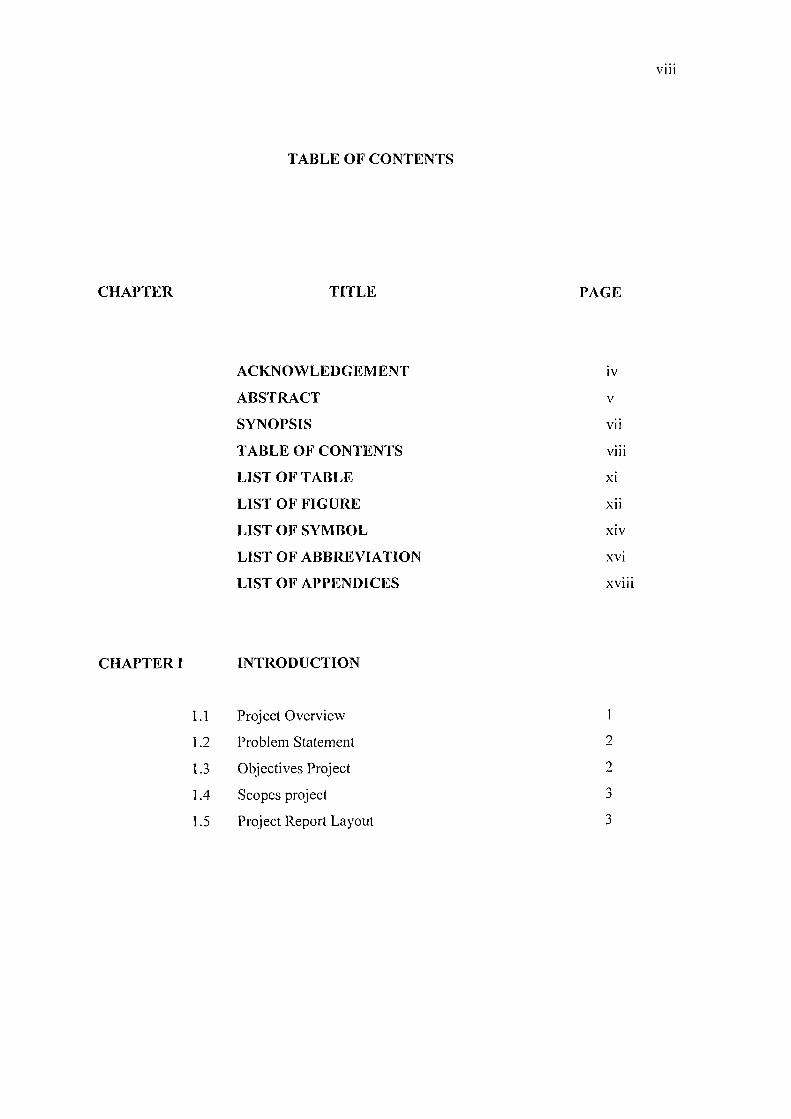
TABLE OF CONTENTS
CHAPTER TITLE PAGE
ACKNOWLEDGEMENT IV
ABSTRACT V
SYNOPSIS vii
T ABLE OF CONTENTS VIII
LIST OF TABLE XI
LIST OF FIGURE xii
LIST OF SYMBOL XIV
LIST OF ABBREVIATION xvi
LIST OF APPENDICES xviii
CHAPTER I INTRODUCTION
1.1 Project Overview
1.2 Problem Statement 2
1.3 Objectives Project 2
1.4 Scopes project 3
1.5 Project Report Layout 3
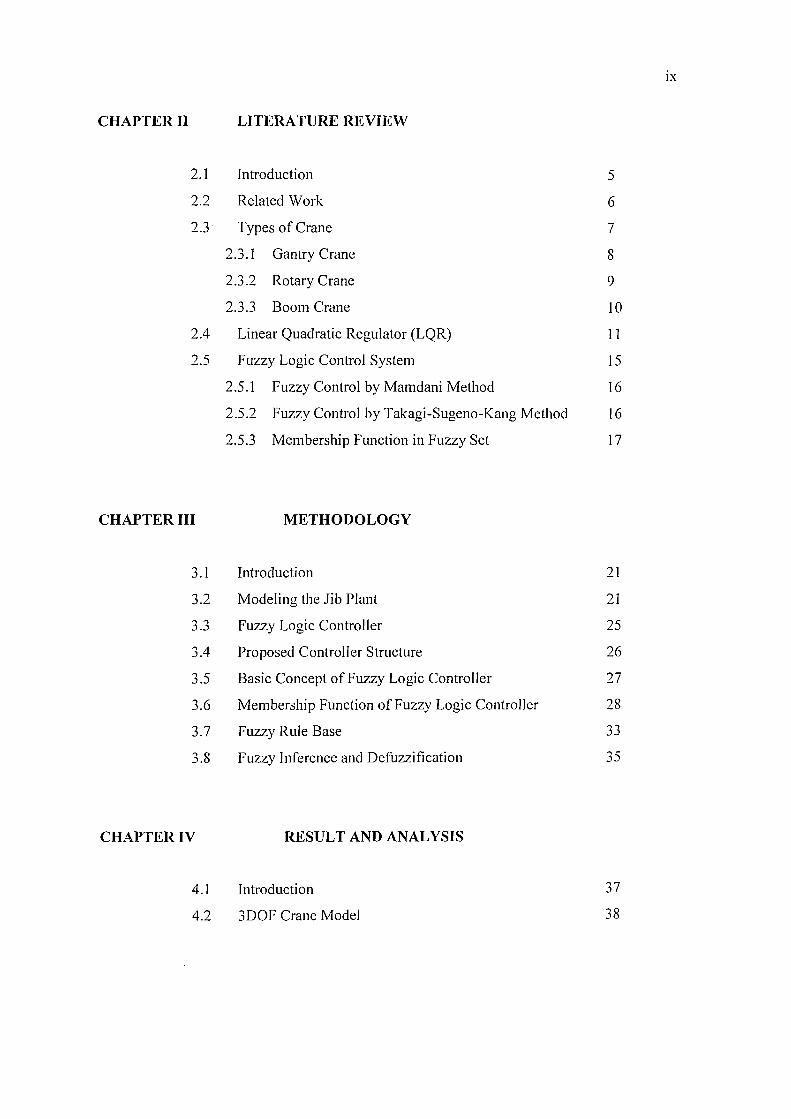
CHAPTER II
2.1
2.2
2.3
2.4
2.5
CHAPTER III
3.1
3.2
3.3
3.4
3.5
3.6
3.7
3.8
CHAPTER IV
4.1
4.2
LITERATURE REVIEW
Introduction
Related Work
Types of Crane
2.3.1 Gantry Crane
2.3.2 Rotary Crane
2.3.3 Boom Crane
Linear Quadratic Regulator (LQR)
Fuzzy Logic Control System
2.5.1 Fuzzy Control by Mamdani Method
2.5.2 Fuzzy Control by Takagi-Sugeno-Kang Method
2.5.3 Membership Function in Fuzzy Set
METHODOLOGY
Introduction
Modeling the Jib Plant
Fuzzy Logic Controller
Proposed Controller Structure
Basic Concept of Fuzzy Logic Controller
Membership Function of Fuzzy Logic Controller
Fuzzy Rule Base
Fuzzy Inference and Defuzzification
RESULT AND ANALYSIS
Introduction
3DOF Crane Model
5
6
7
8
9
10
11
15
16
16
17
21
21
25
26
27
28
33
35
37
38
IX
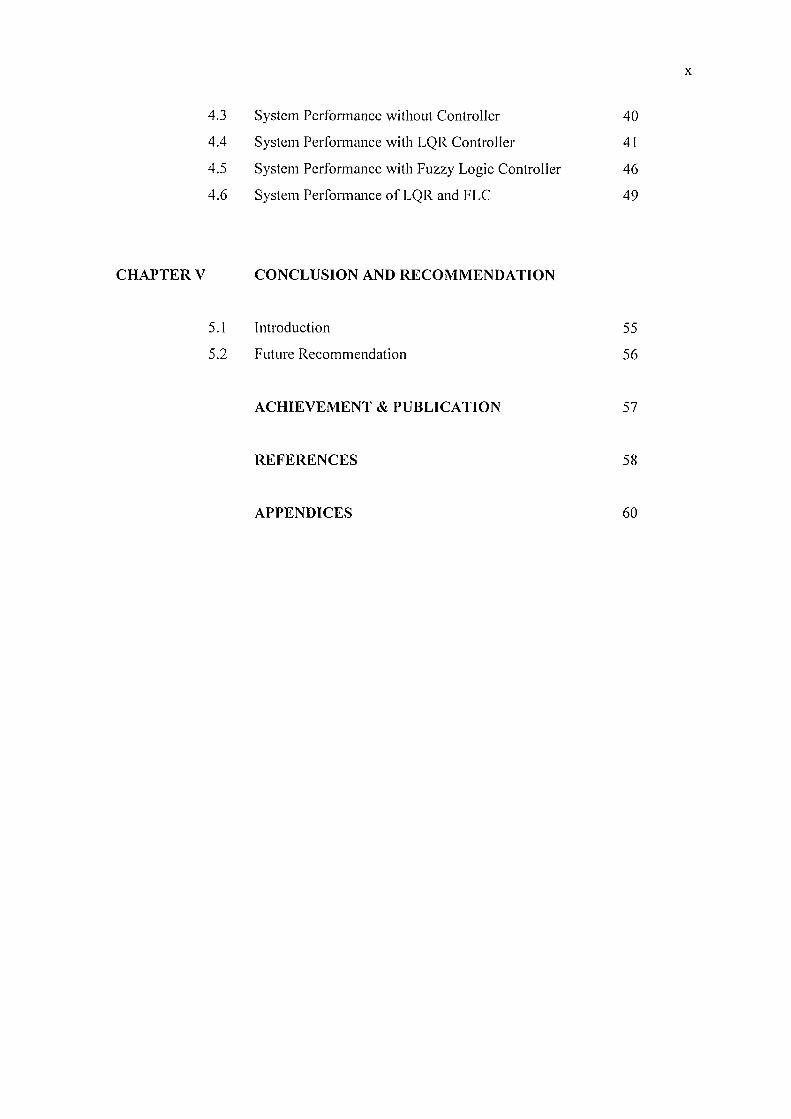
CHAPTER V
4.3
4.4
4.5
4.6
5.1
5.2
System Pcrfonnance without Controller
System Performance with LQR Controller
System Performance with Fuzzy Logic Controller
System Performance of LQR and FLC
CONCLUSION AND RECOMMENDATION
Introduction
Future Recommendation
ACHIEVEMENT & PUBLICATION
REFERENCES
APPENDICES
40
41
46
49
55
56
57
58
60
x
Xl
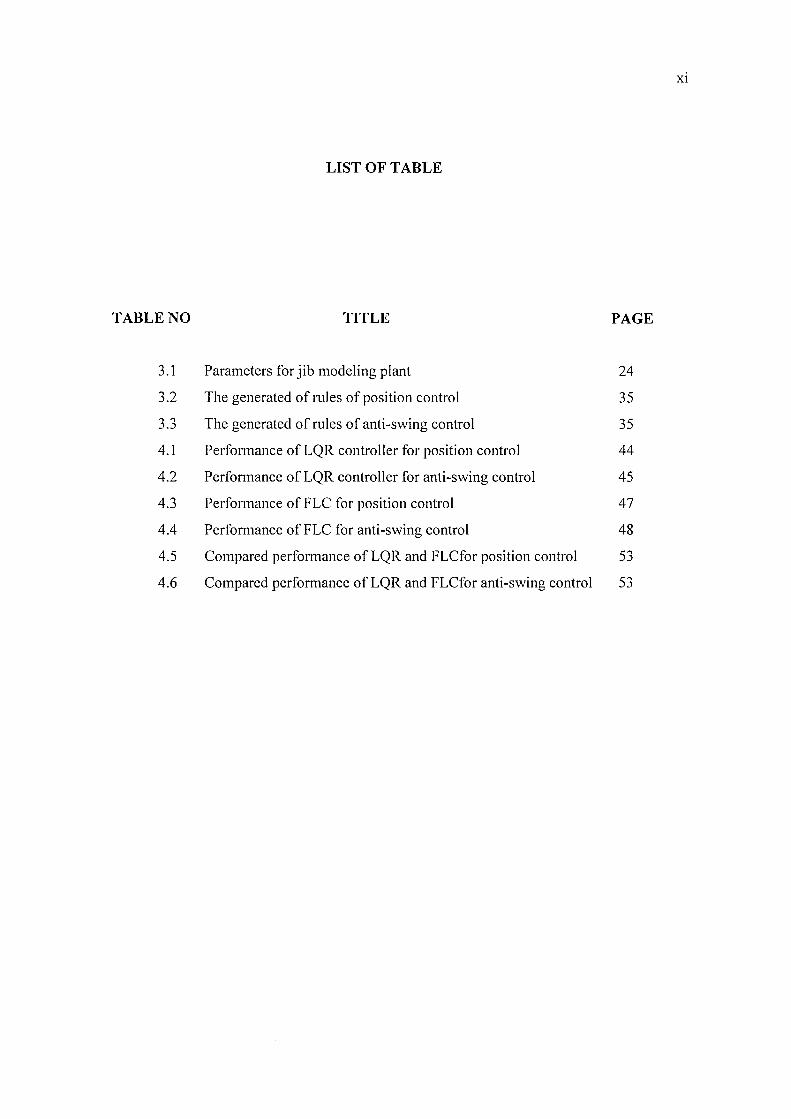
LIST OF TABLE
TABLE NO TITLE PAGE
3.1 Parameters for jib modeling plant 24
3.2 The generated of rules of position control 35
3.3 The generated of rules of anti-swing control 35
4.1 Perfonnance ofLQR controller for position control 44
4.2 Perfonnance of LQR controller for anti-swing control 45
4.3 Perfomlance of FLC for position control 47
4.4 Perfomlance ofFLC for anti-swing control 48
4.5 Compared perfonnance ofLQR and FLCfor position control 53
4.6 Compared perfonnance of LQR and FLCfor anti-swing control 53
Xll
LIST OF FIGURE
FIGURE NO. TITLE PAGE
2.1 Gantry crane 8
2.2 Rotary crane 9
2.3 Boom crane 10
2.4 Block diagram ofTSK rules operation 17
2.5 Straight lines of membership function 19
2.6 Gaussian type of membership function 20
3.1 Free body diagram of jib system 22
" ') j.- The system block diagram with FLC 25
3.3 Schematic diagram of 3DOF Crane system
using FLC 26
3.4 Elements of Fuzzy Logic Controller 27
3.5 Membership function of position control 29
3.6 Membership function of anti-swing control 31
3.7 Physical movement for the positive force
displacement 33
3.8 Physical movement for the negative force
displacement 34
4.1 Model of 3DOF Crane 38
4.2 The limit switch location for safety trolley
movement 39
4.3 Simulated plot for trolley position without
controller 40
XlIl
4.4 Simulated plot for pendulum angle without
controller 40
4.5 Jib system with LQR controller 42
4.6 Trolley position for LQR simulated result 44
4.7 Pendulum swing angle for LQR simulated result 45
4.8 Jib system with FLC 46
4.9 Trolley position for FLC simulated result 47
4.10 Pendulum swing angle for FLC simulated result 48
4.11 Response at 0.1 m step input reference 49
4.12 Response at 0.2m step input reference 50
4.13 Response at 0.3m step input reference 51
4.14 Response at O.4m step input reference 52
A
B
C
D
a
Y
X J
rj,pullcy
g
mtrollcy
17m,}
Ktj
d(t)
rd(t)
Yd(t)
8 d(t)
LIST OF SYMBOL
state matrix
input matrix
output matrix
direct transmission
motion angle perpendicular jib length
payload angle
current DC motor
position trolley
position of payload from jib
length of payload
position of payload from tower
mass of trolley
radius of trolley pulley from pivot to end of tooth
gravitational
mass of trolley
jib motor equivalent moment of inertia
motor gear ration for jib
jib motor gearbox effIciency
jib motor efficiency
jib motor torque constant
desired position
radial acceleration
rotational acceleration
output of plane angle
XIV
Xrcr(s)
Xes)
e /lui
/lu2
/lx
/lx-
~ly
/lY-
v
/\
references of trolley position
output position
output swing angle
degree of membership flInction of output for position control
degree of membership function of output for anti-swing control
degree of membership function of error for position control
degree of membership function of error rate for position control
degree of membership function of error for anti-swing control
degree of membership function of error rate for anti-swing
control
maximum operator
minimum operator
output of eOA
xv
CARE
COA
CW
DARE
FIS
FLC
gaussmf
gauss2mf
gbellmf
LQR
MF
N
NB
NS
P
PB
PD
LIST OF ABBREVIATIONS
Continuous time Algebraic Ricatti Equation
Centre of Area
clock wise
Discrete time Algebraic Ricatti Equation
Fuzzy Inference System
Fuzzy Logic Controller
gaussian membership function (simple curve)
gaussian membership function (two sided composite of different
curve)
generalized bell membership function
Linear Quadratic Regulator
membership function
Negative
Negative Big
Negative Small
Positive
Positive Big
PropotionaI Derivative
XVI
PID
PS
trapmf
trimr
TSK
Z
Propotional Integral Derivative
Positive Small
tarpezoidal membership function
triangle membership function
Takagi-Sugeno Kang
Zero
:-':\'11
XVllI
LIST OF APPENDICES
APPENDIX TITLE PAGE
A 3 DOF CRANE SETUP CODE 61
B 3 DOF CRANE CONFIGURA nON CODE 64
C 3 DOF CRANE CONVERSION CODE 69
D 3 DOF CRANE CALLBACK CODE 70
E 3 DOF CRANE JIB EQUATION 71
F 3 DOF CRANE CLEAR CALLBACK CODE 73
G 3 DOF CRANE TOWER EQUA nON 74
CHAPTER 1
INTRODUCTION
1.1 Project Overview
Crane is a machine that use levers and pulleys for gripping, lifting and moving
loads horizontally, as well as lowering and release the gripper back. It is considered as
one of the most important machines that are being used in industry to transfer loads
from one desired position to another position. These cranes have very strong structures
in order to lift heavy payloads in factories, in building construction, on ships, and in
harbors. These tasks are performed with the aid of hoisting mechanism that works as an
integral part of the crane. Until recently, cranes were manually operated by
professional person. But when cranes became larger and they are being moved at high
speeds, their manual operation became difficult. In factories, cranes speed up the
production processes by moving heavy materials to and from the factory as well as
moving the products along production or assembly lines. In building construction,
cranes facilitate the transport of building materials to high and critical spots. Similarly
on ships and in harbors, cranes save time and consequently money in making the
process of loading and unloading ships fast and efficient.
1.2 Problem Statement
3 DOF crane was included in the overhead crane types and are widely used in
industry for moving heavy objects. However, the overhead cranes have serious
problems such as the acceleration and always induce undesirable load swing, which is
frequently aggravated by load hoisting. Such load swing usually degrades work
efficiency and sometimes causes load damages and even compromise safety aspects.
From a dynamics point of view, the overhead cranes are under actuated mechanical
systems. The overhead cranes have fewer control inputs than the degrees of freedom,
which complicate the related control problems. The first attempt to control the position
and swing angle of the system is done using classical controller, utilizing LQR method.
However, this conventional controller involved complex mathematical computation
which is time consuming. In this project report, it is proposed to apply FLC mechanism
to overcome the problem of exact position and swing effect.
1.3 Objectives Project
The objectives of this project are:
i) To investigate better control strategy to transfer loads using
Fuzzy Logic Controller.
ii) To investigate better control strategy to suppress swing using
Fuzzy Logic Controller.
iii) To propose FLC which are simple structure and easy to design.
2





![FJ U/i J M I VIRI^QR€¦ · j m i viri^qr n_e@] j@niq m igi [@vi -rm irvi@ omm i tp -rm ir/vi@ jig -rm ir npg^vi@ jig @xiji 'nv^ j ewi^ jm/v i h3 jh3vi@ fio\^v mli^ g@w s1q@y xj@^b](https://cdn.vdokumen.net/doc/165x107/60cfa992842784113c2b1db7/fj-ui-j-m-i-viriqr-j-m-i-viriqr-ne-jniq-m-igi-vi-rm-irvi-omm-i-tp-rm.jpg)
![1111111~llrl~IIII~IIII~~I~I~I]~111111i1~1111111~1~1~1 ...eprints.uthm.edu.my/id/eprint/1494/1/24_Pages_from_COMPACT_MICROWAVE... · Jabatan Kejuruteraan Perhubungan Radio Fakulti](https://cdn.vdokumen.net/doc/165x107/5e37f526e7931f3d083e276a/1111111llrliiiiiiiiiii111111i11111111111-jabatan-kejuruteraan-perhubungan.jpg)
